
A Bio-Inspired Method for Mathematical Optimization Inspired by Arachnida Salticidade

 , ,
, , 
Abstract
:1. Introduction
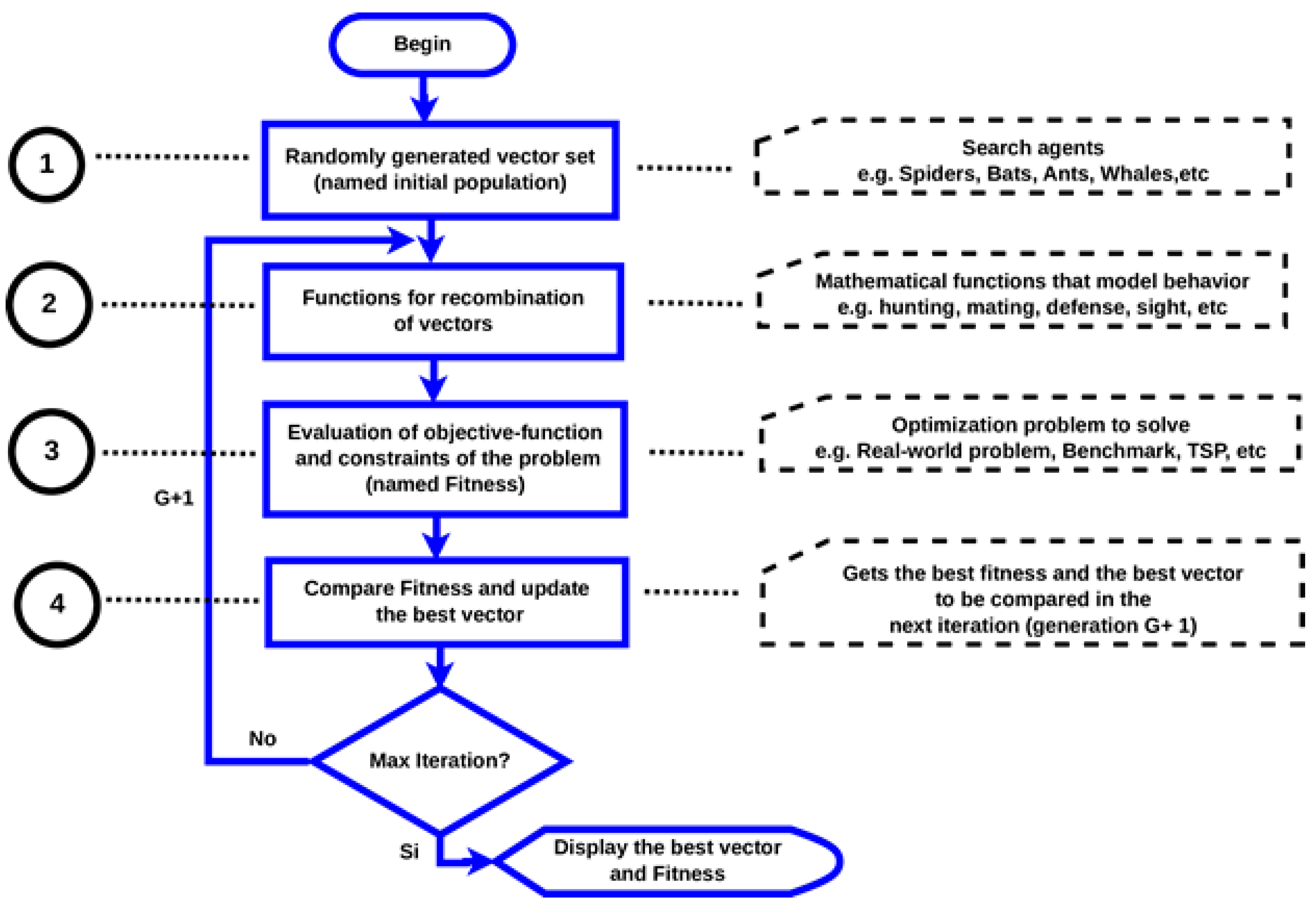
2. Jumping Spider Optimization Algorithm (JSOA)
2.1. Biological Fundamentals
2.2. Mathematical Model and Optimization Algorithm
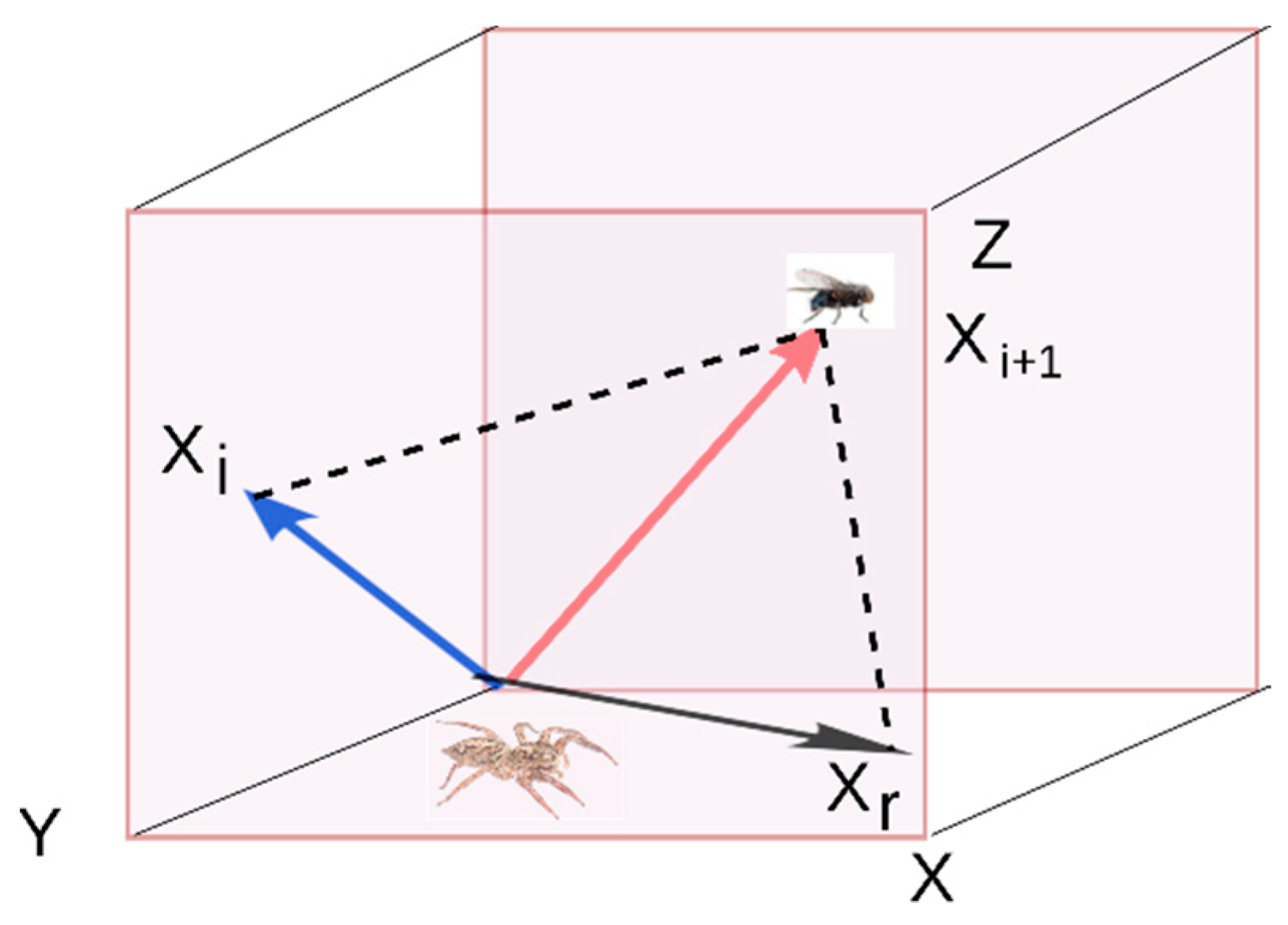
2.2.1. Strategy 1: Persecution
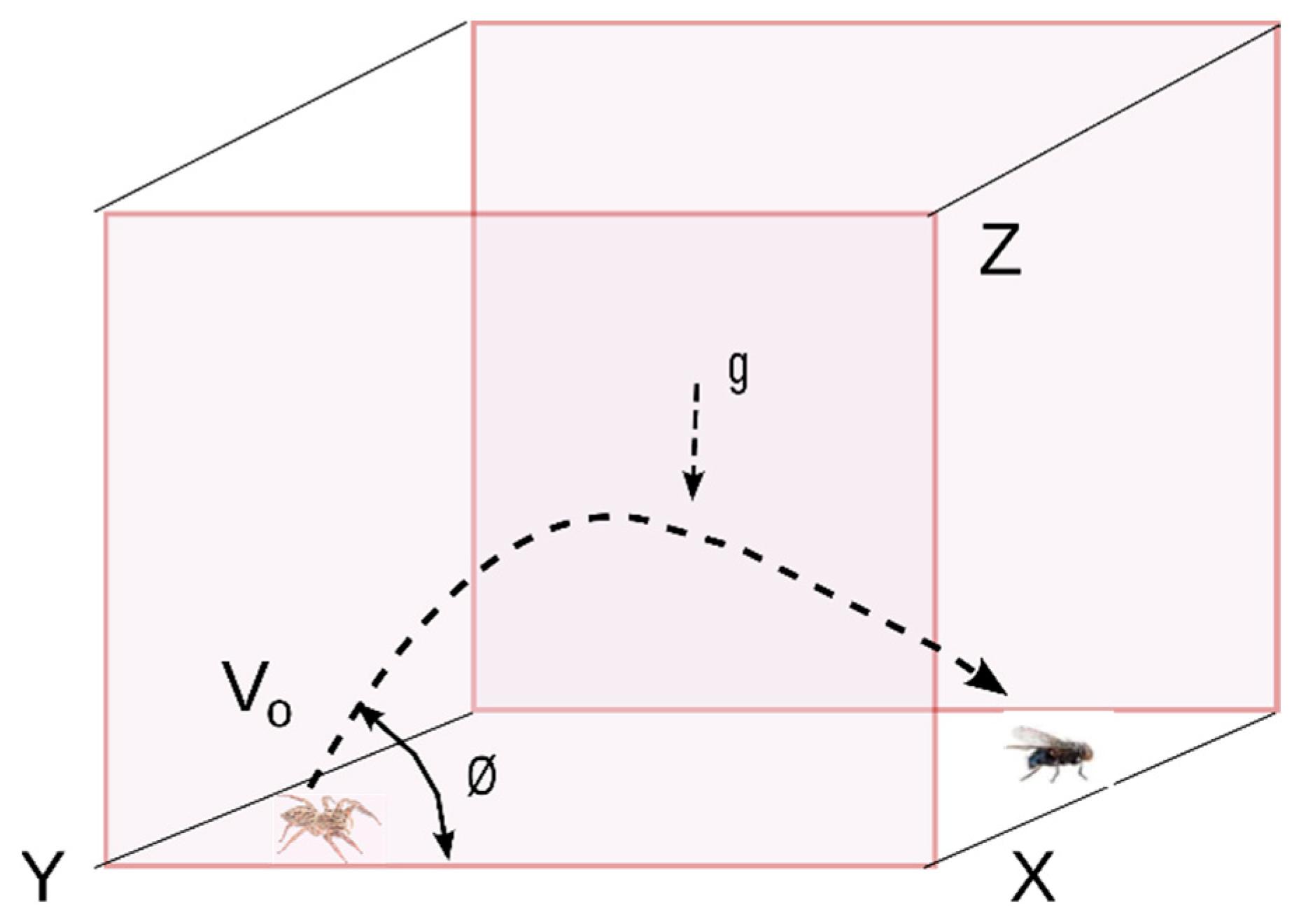
2.2.2. Strategy 2: Jumping on the Prey
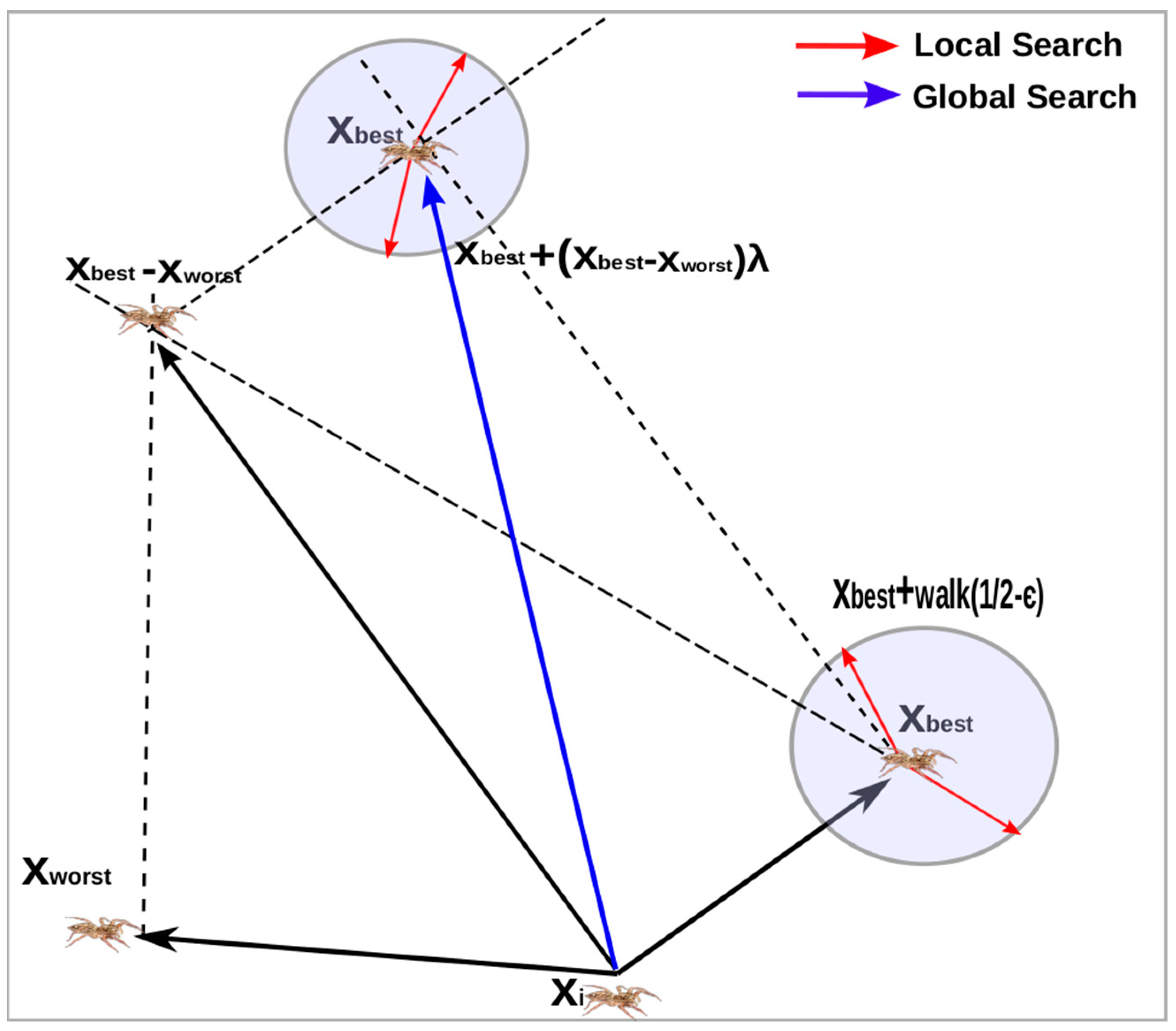
2.2.3. Strategy 3: Searching for Prey
2.2.4. Strategy 4: Jumping Spider’ Pheromone Rates
| Algorithm 1 Pheromone procedure |
|
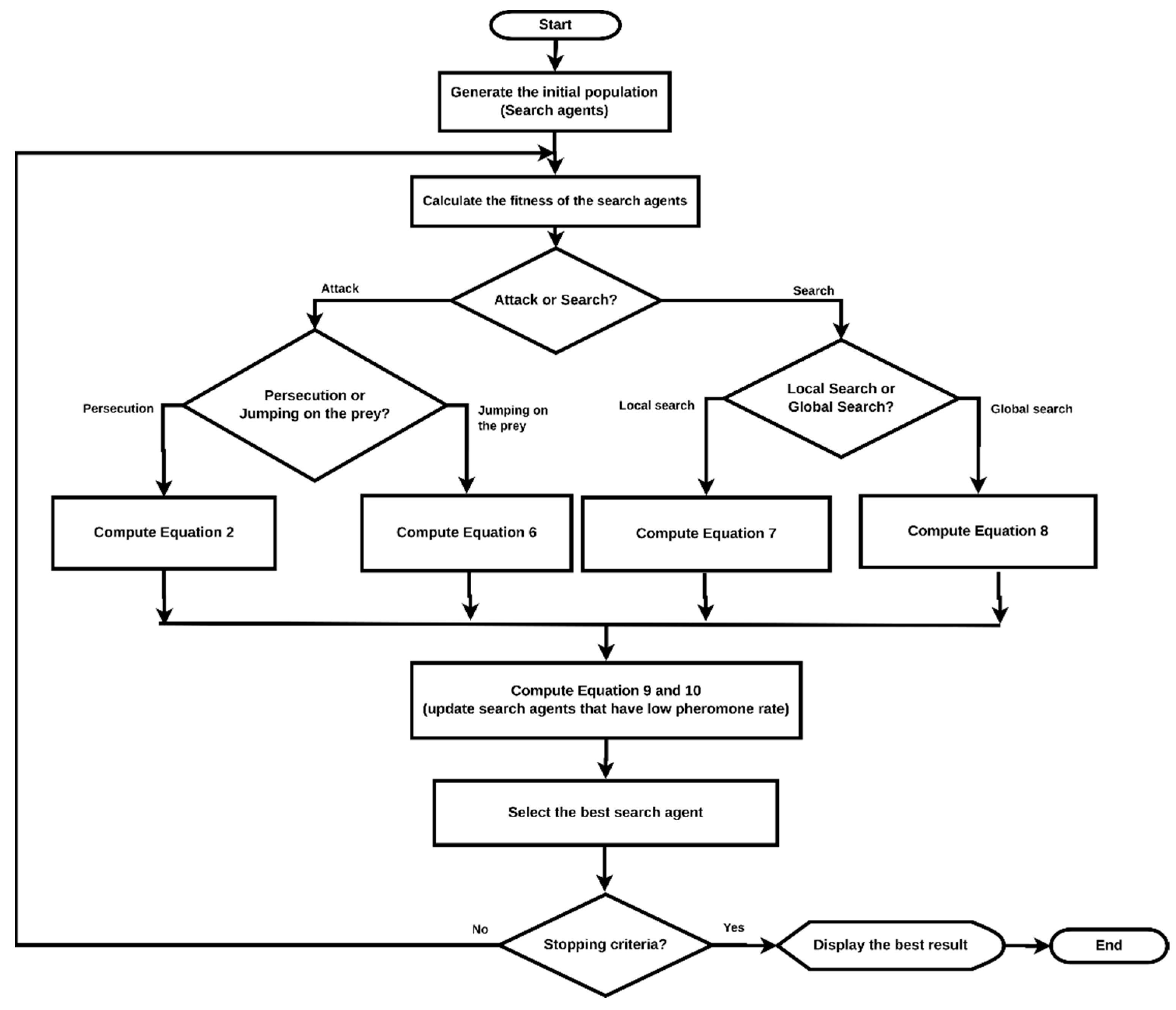
2.2.5. Pseudo Code for JSOA
| Algorithm 2 Jumping Spider Optimizer Algorithm |
|
2.3. JSOA Algorithm Analysis
2.3.1. Time Complexity
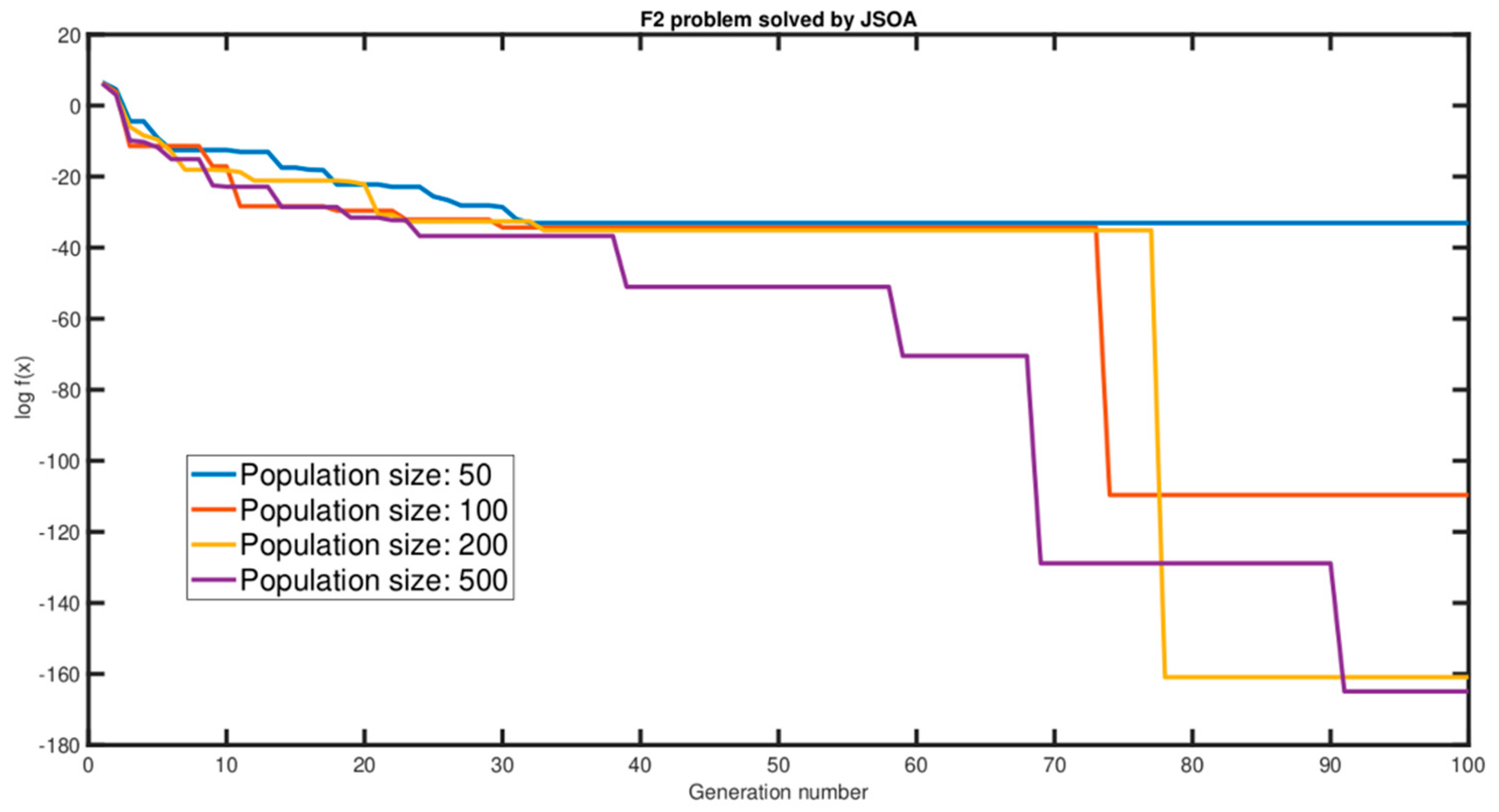
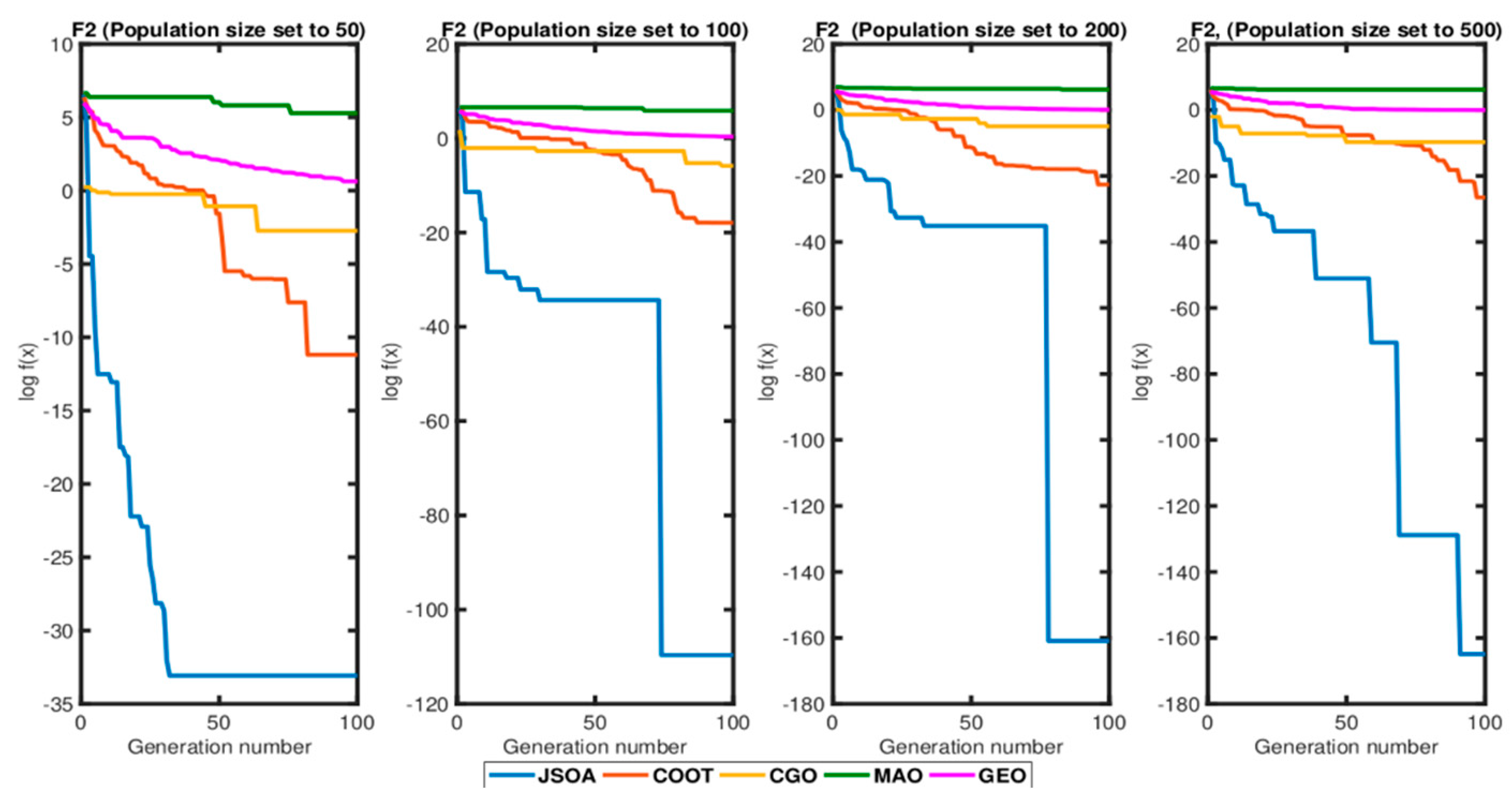
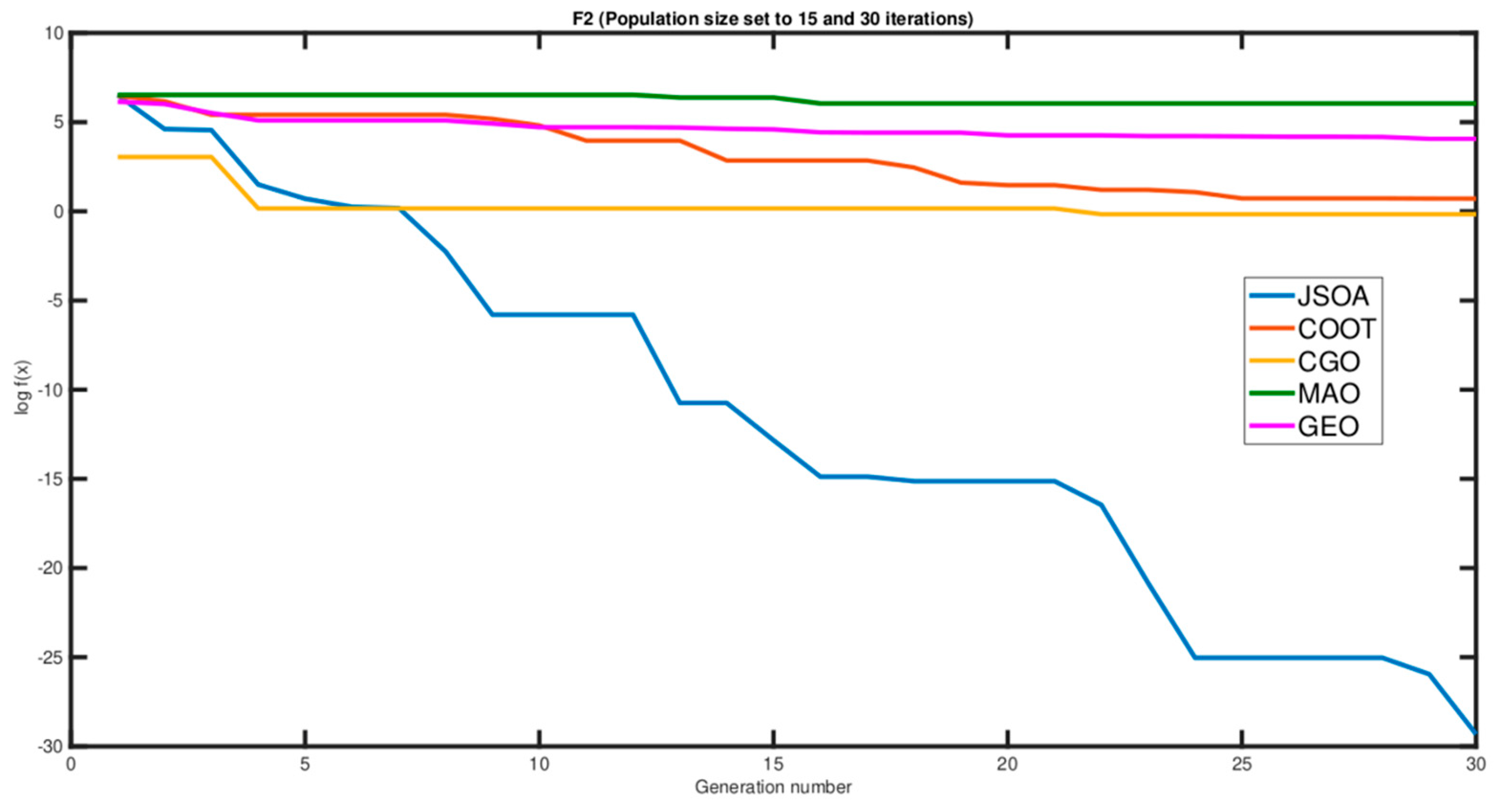
2.3.2. Population Size Analysis
3. Experimental Setup
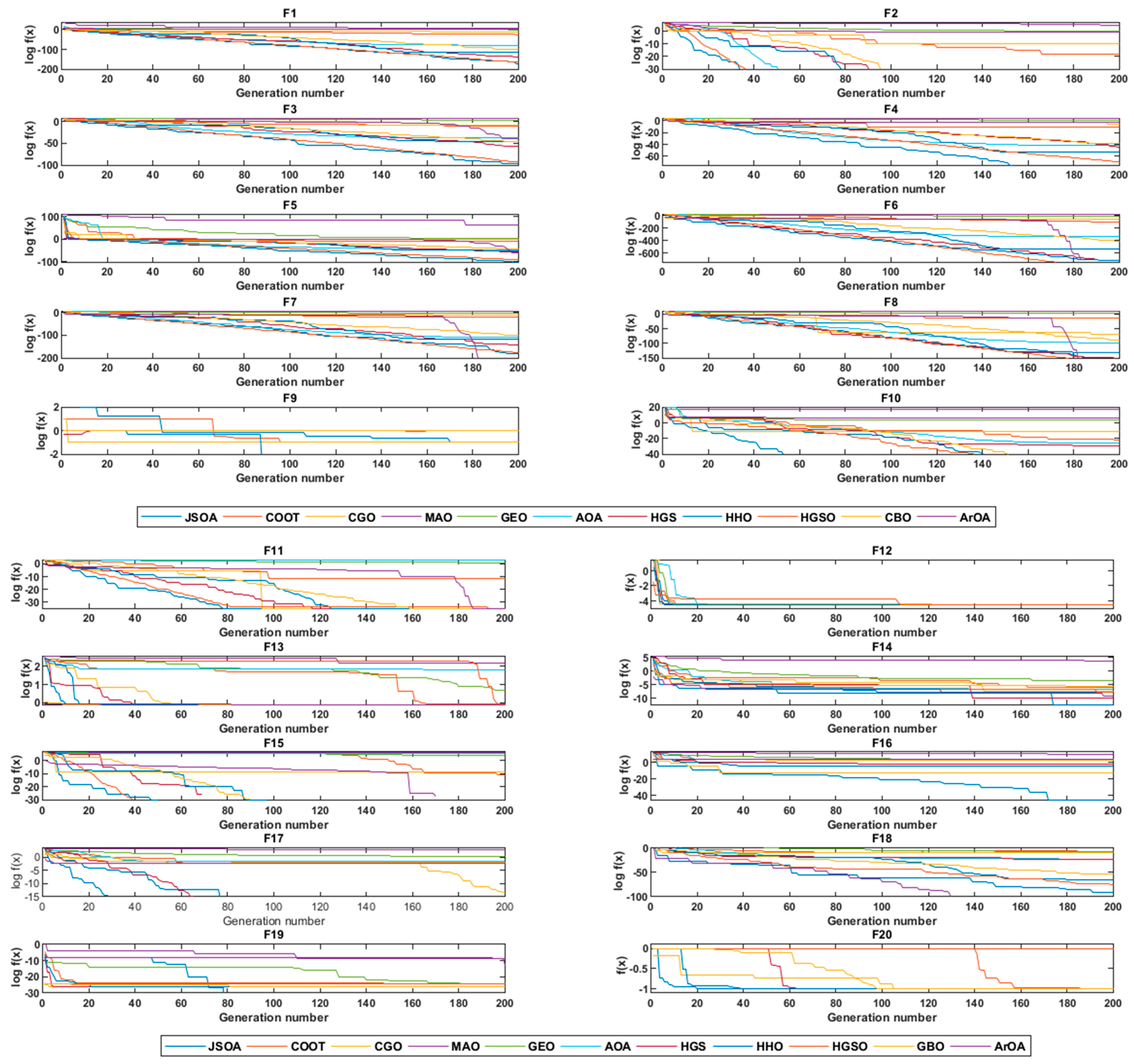
4. Results and Discussion
5. Real-World Applications
5.1. Constraint Handling
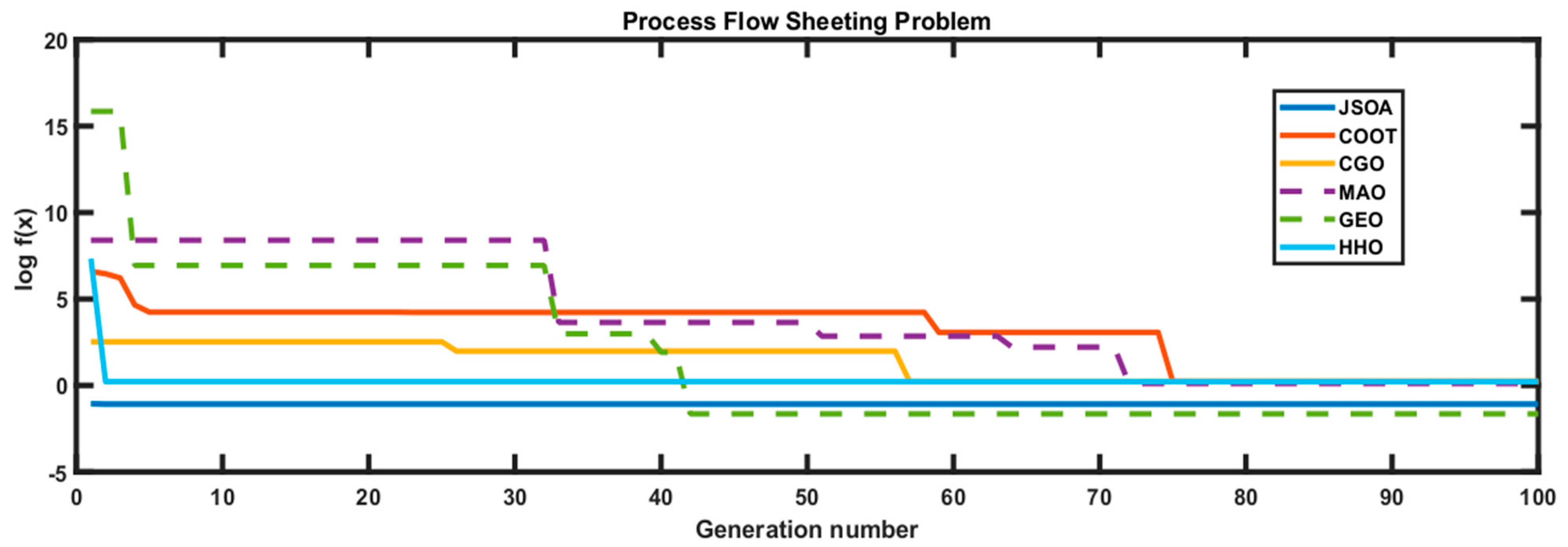
5.2. Process Flow Sheeting Problem
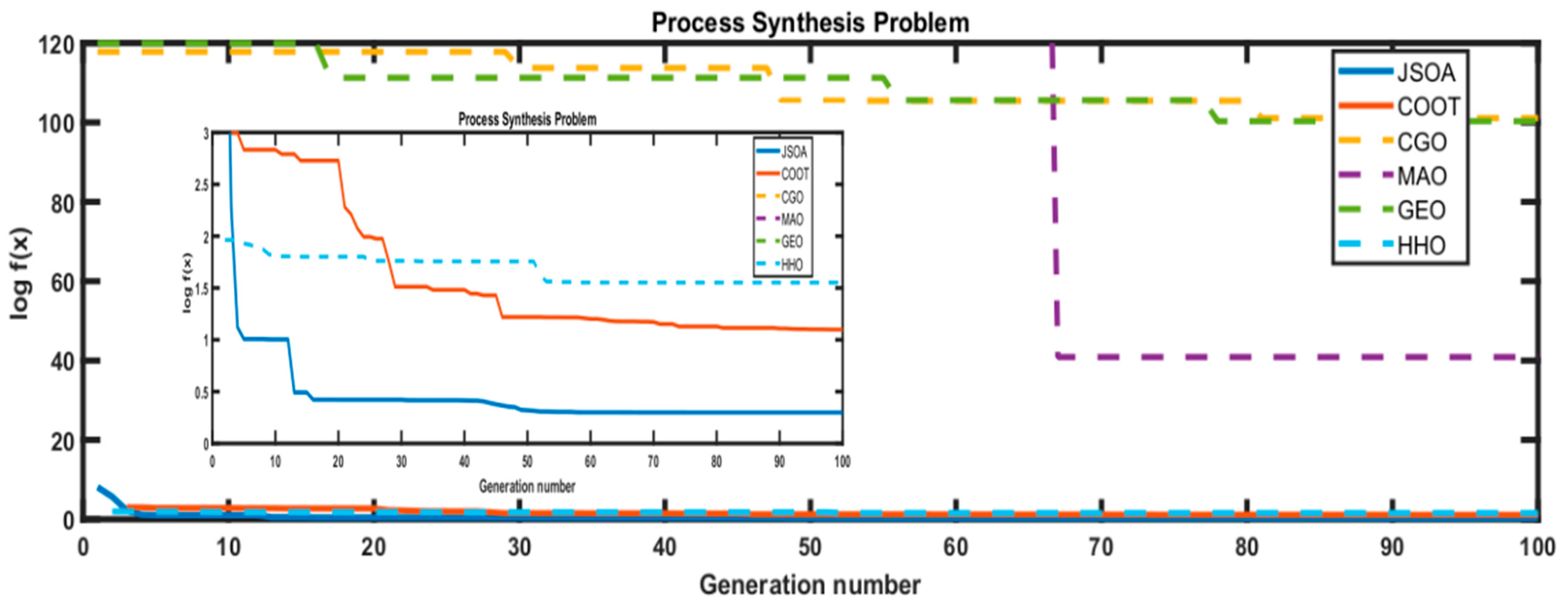
5.3. Process Synthesis Problem
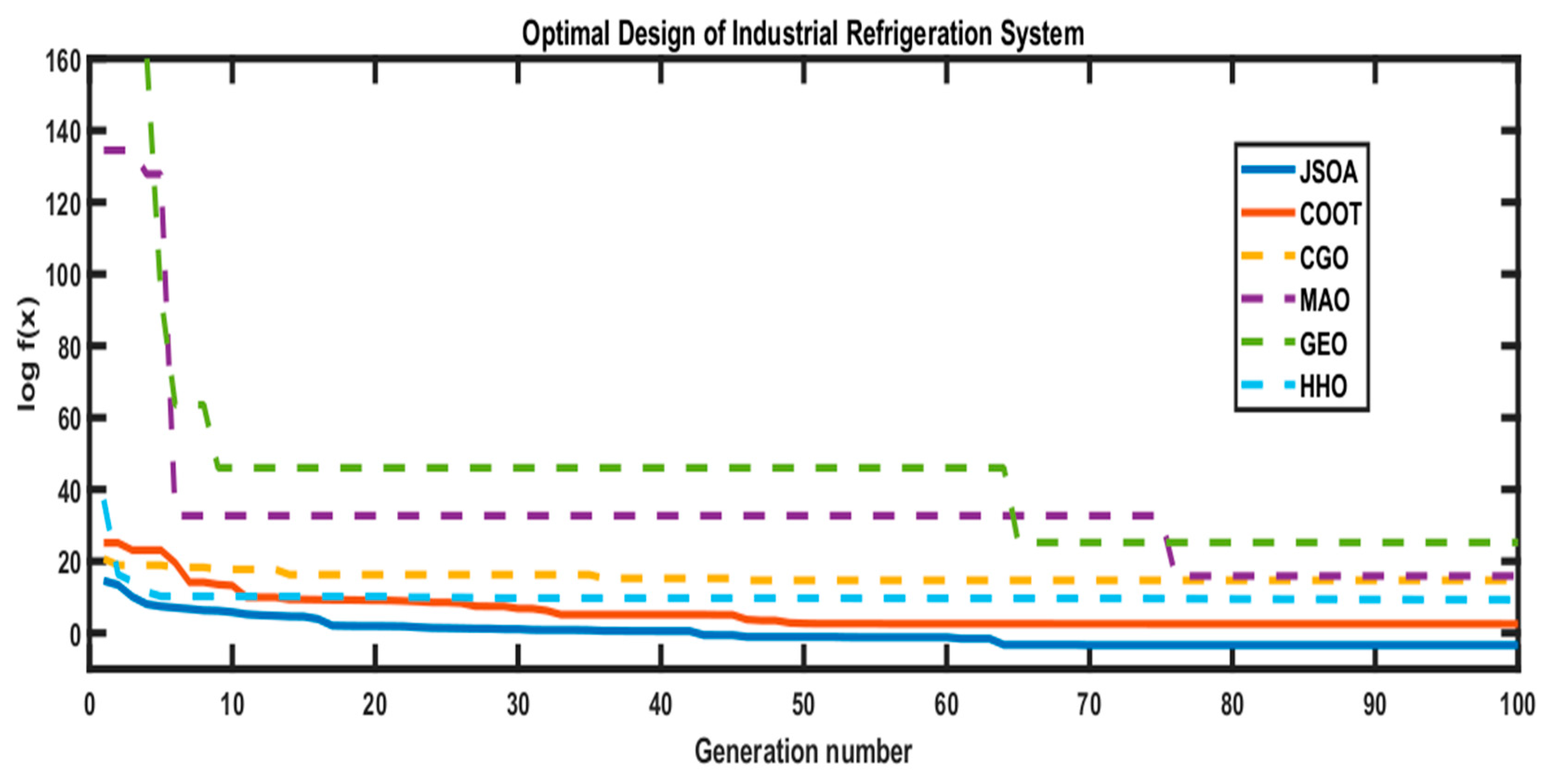
5.4. Optimal Design of an Industrial Refrigeration System
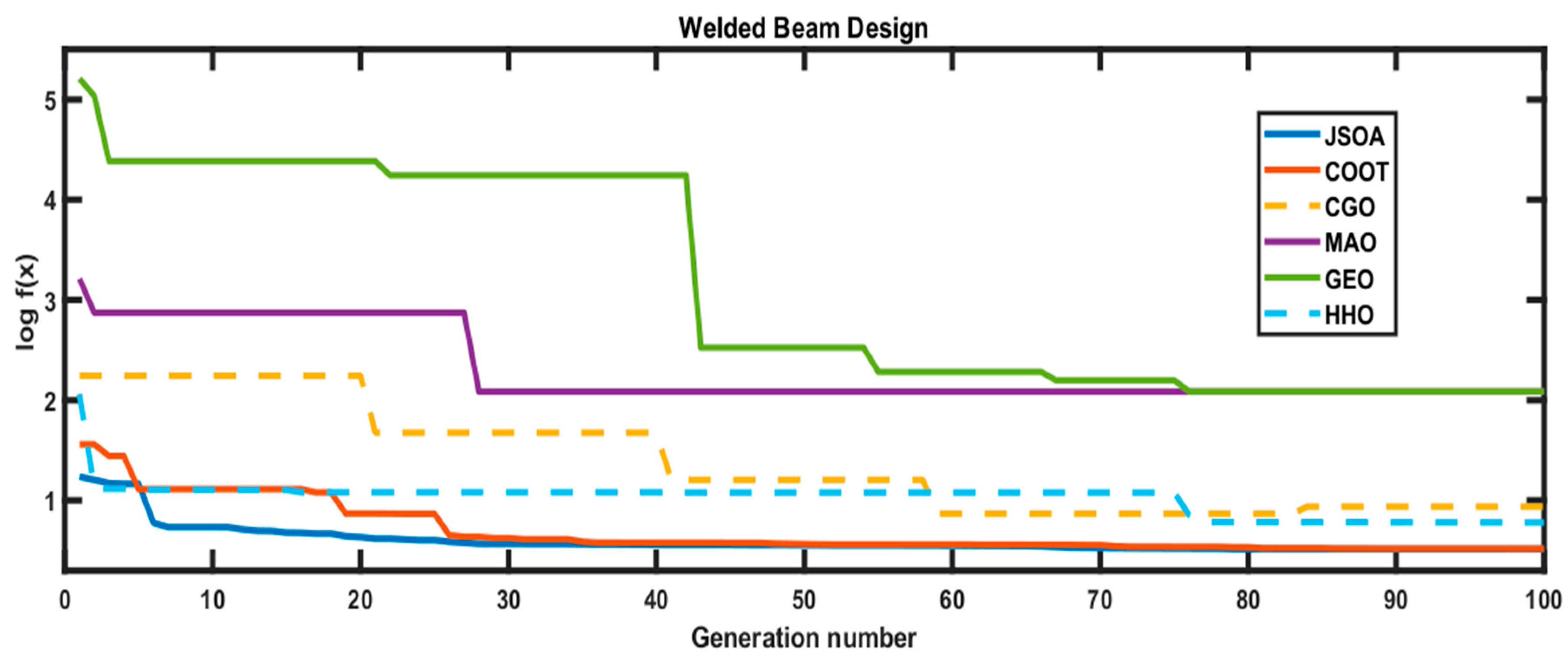
5.5. Welded Beam Design
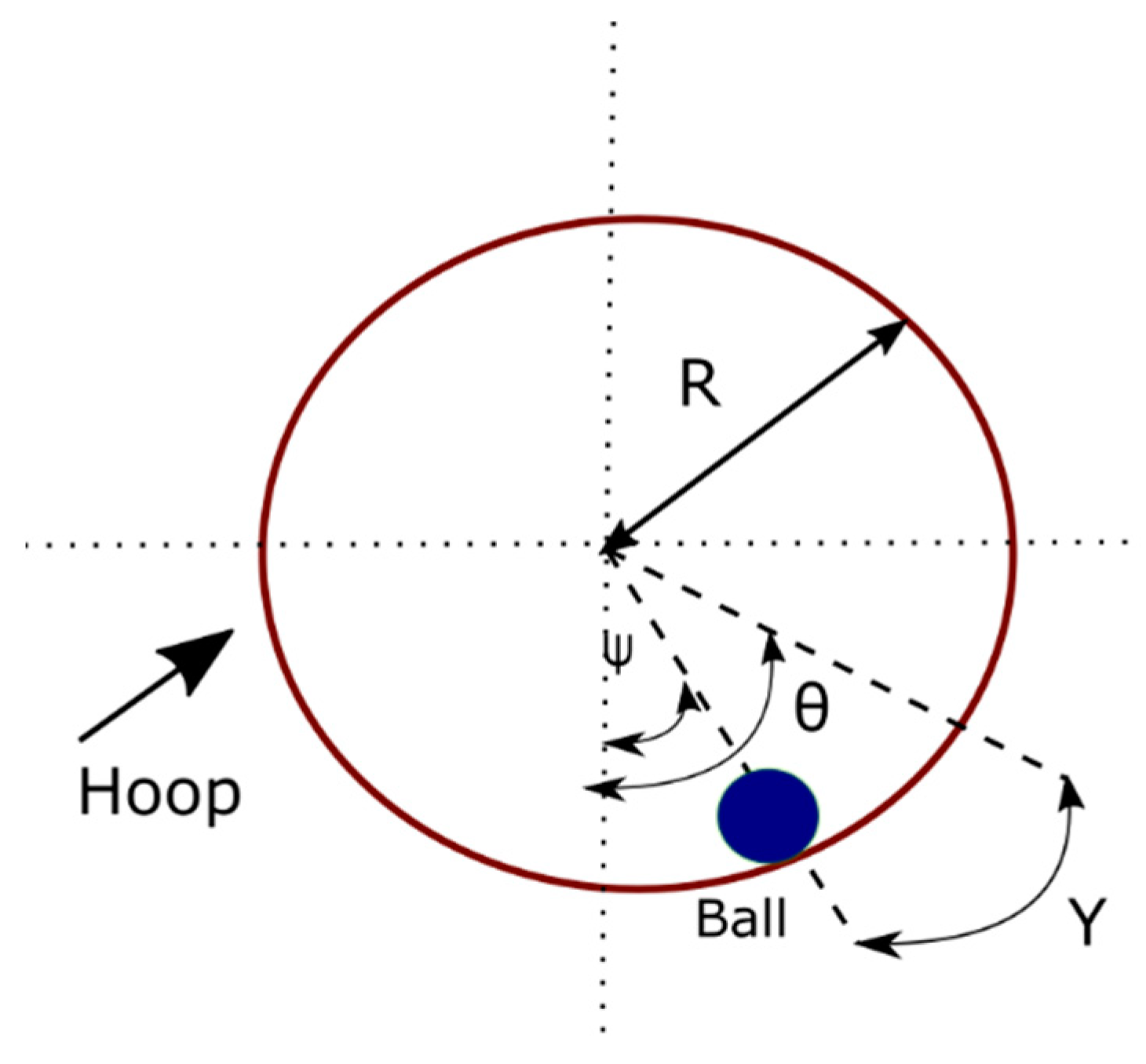
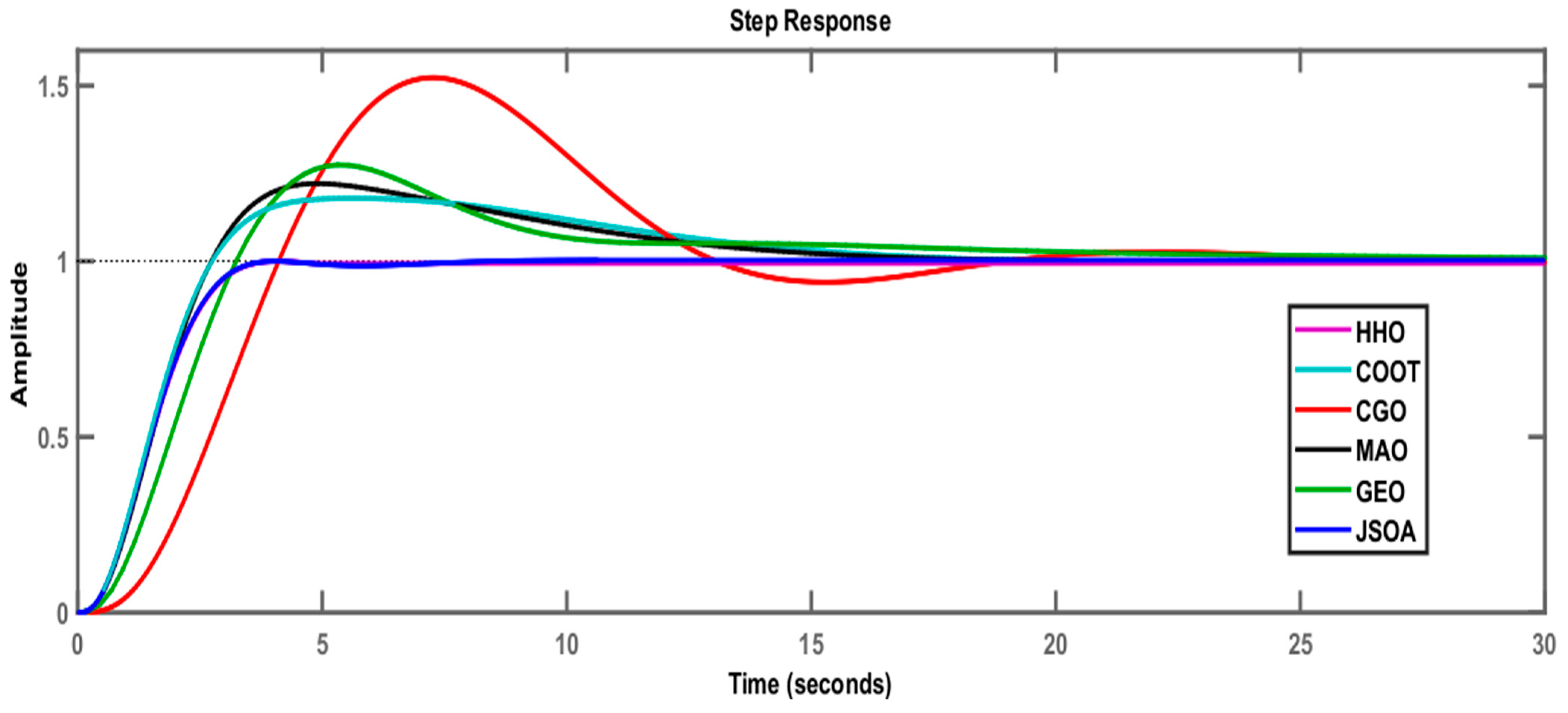
5.6. Tuning of a Proportional-Integral-Derivative (PID) Controller: Sloshing Dynamics
Problem
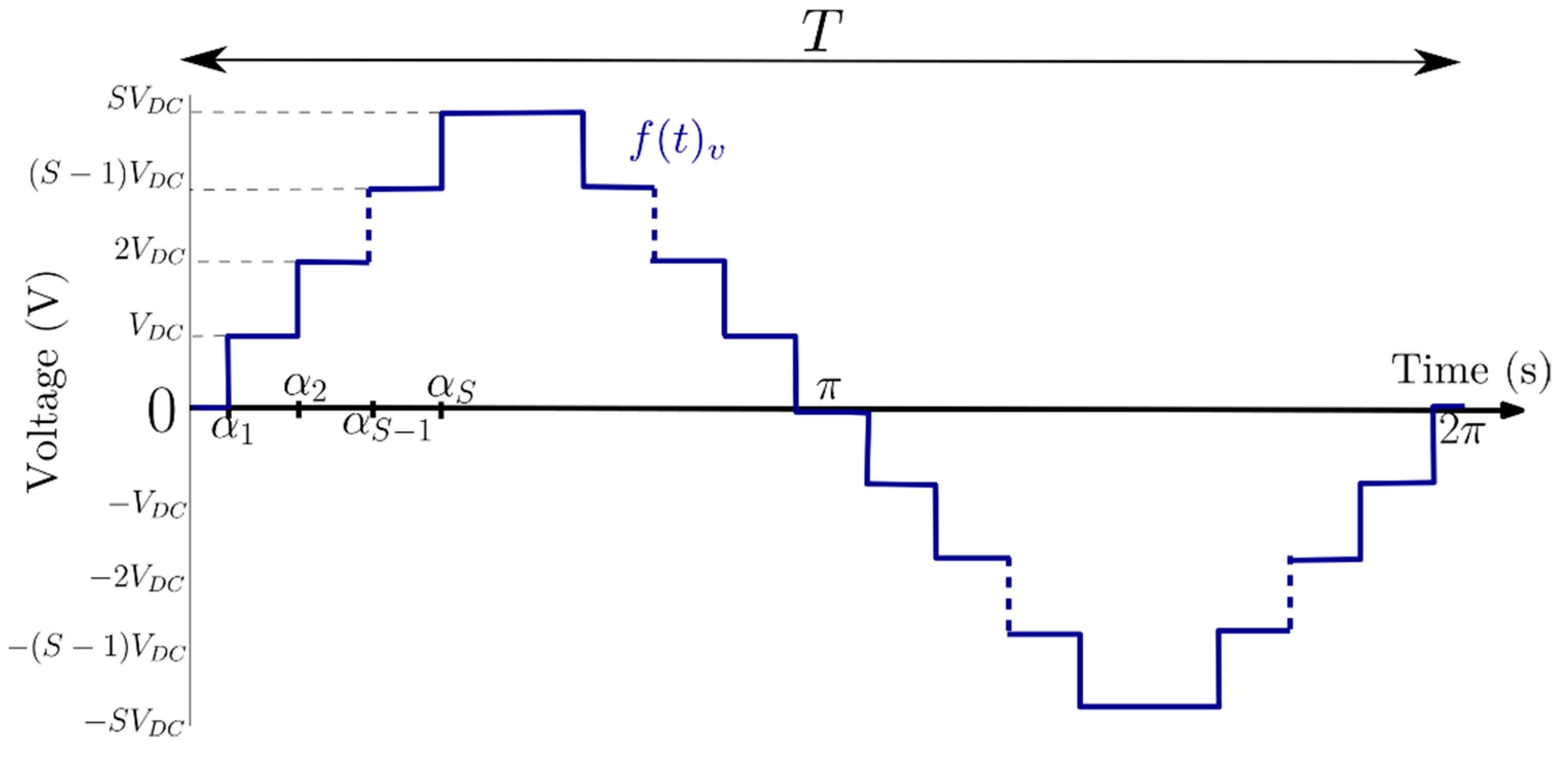
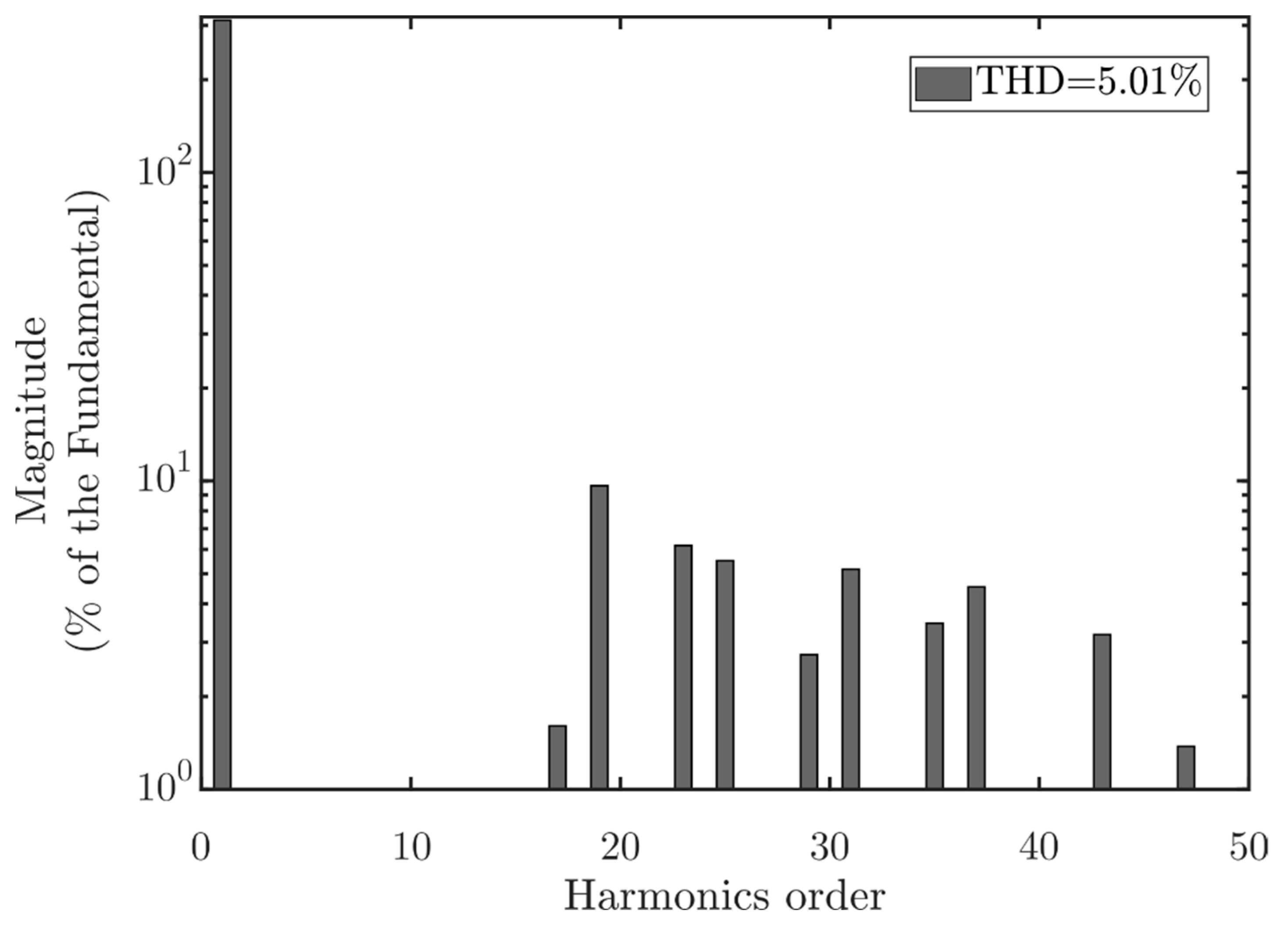
5.7. Selective Harmonics Elimination (SHE) Problem
6. Conclusions
- The JSOA algorithm does not have parameters to configure affecting its performance.
- Exploitation and exploration of the JSOA are intrinsically high on problems involving unimodal and multimodal test functions, respectively.
- The algorithm has outstanding results with few iterations, 200 for the testbench functions and 100 for the real-world problems.
- The JSOA algorithm models the pheromone of spiders whose criteria are used to repair vectors with a low pheromone level. The vectors (spiders, also named search agents) with the worst fitness are replaced in each iteration. This repair helps get a better performance in the exploration of the search space.
- The Wilcoxon rank-sum test p-values confirm the meaningful advantage of JSOA compared to other bio-inspired algorithms for many cases. In addition, the MAE statistical results show that the JSOA is ranked among the highest position compared to the other algorithms.
- JSOA can tune a Proportional-Integral-Derivative (PID) controller with very fine control without exceeding the setpoint, with zero percent of peak overshoot for the Sloshing dynamics Problem.
- JSOA can solve the Selective Harmonic Elimination problem with the best fitness value results compared to WOA, MGWOA, BWOA, COOT, CGO, MAO, GEO, and HHO algorithms and competitive results with the BWOA algorithm regarding the Total Harmonic Distortion (THD)
- JSOA can solve real-world problems with unknown search spaces.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Function Name | Unimodal | Multimodal | n-Dimensional | Non-Separable | Convex | Differentiable | Continuous | Non-Convex | Non-Differentiable | Separable | Random |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
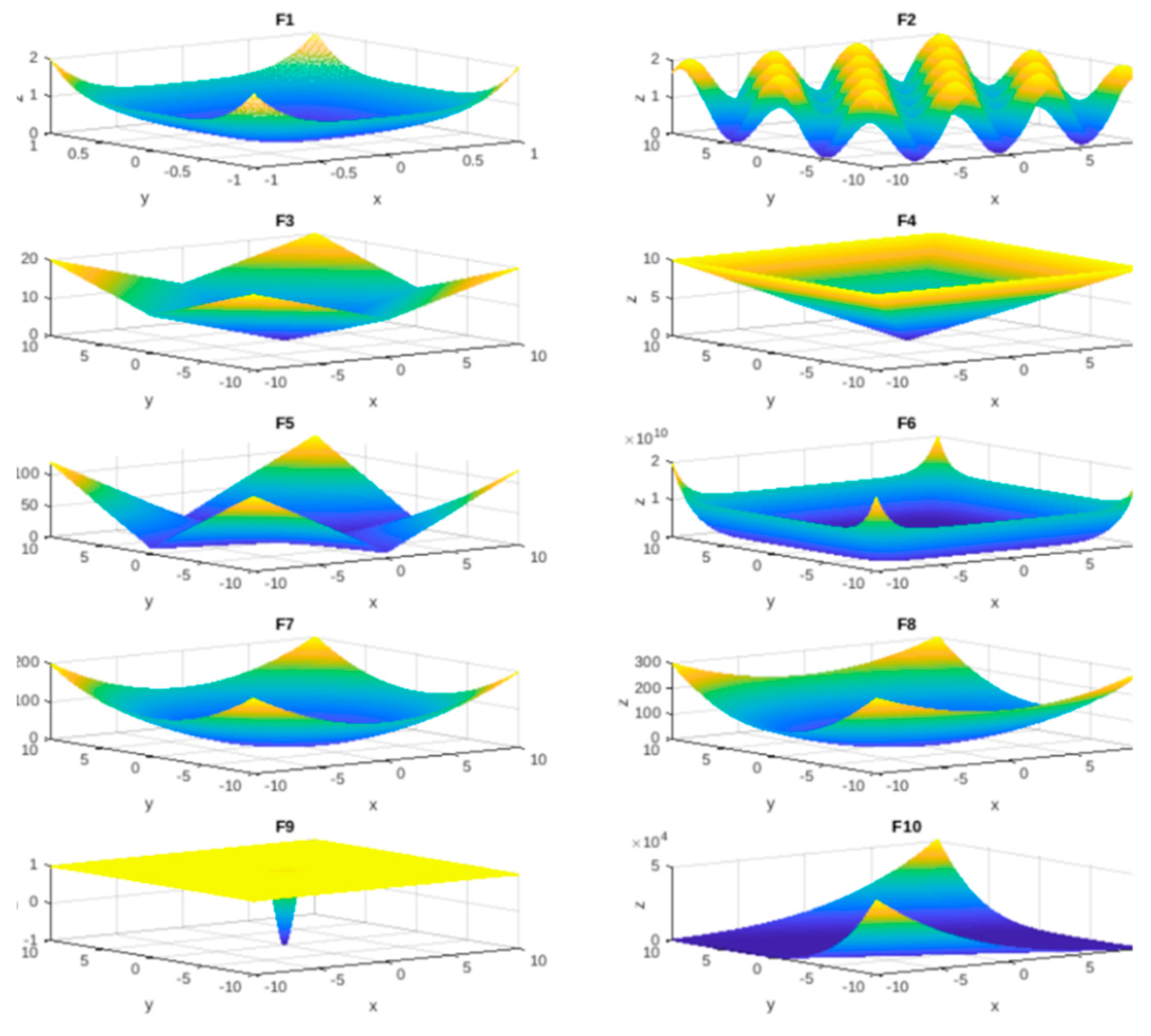
| F1 | Brown | X | X | X | X | X | ||||||
| F2 | Griewank | X | X | X | X | X | ||||||
| F3 | Schwefel 2.20 | X | X | X | X | X | X | |||||
| F4 | Schwefel 2.21 | X | X | X | X | X | X | |||||
| F5 | Schwefel 2.22 | X | X | X | X | X | X | |||||
| F6 | Schwefel 2.23 | X | X | X | X | X | X | |||||
| F7 | Sphere | X | X | X | X | X | X | |||||
| F8 | Sum Squares | X | X | X | X | X | X | |||||
| F9 | Xin-She Yang N. 3 | X | X | X | X | X | ||||||
| F10 | Zakharov | X | X | X | X | |||||||
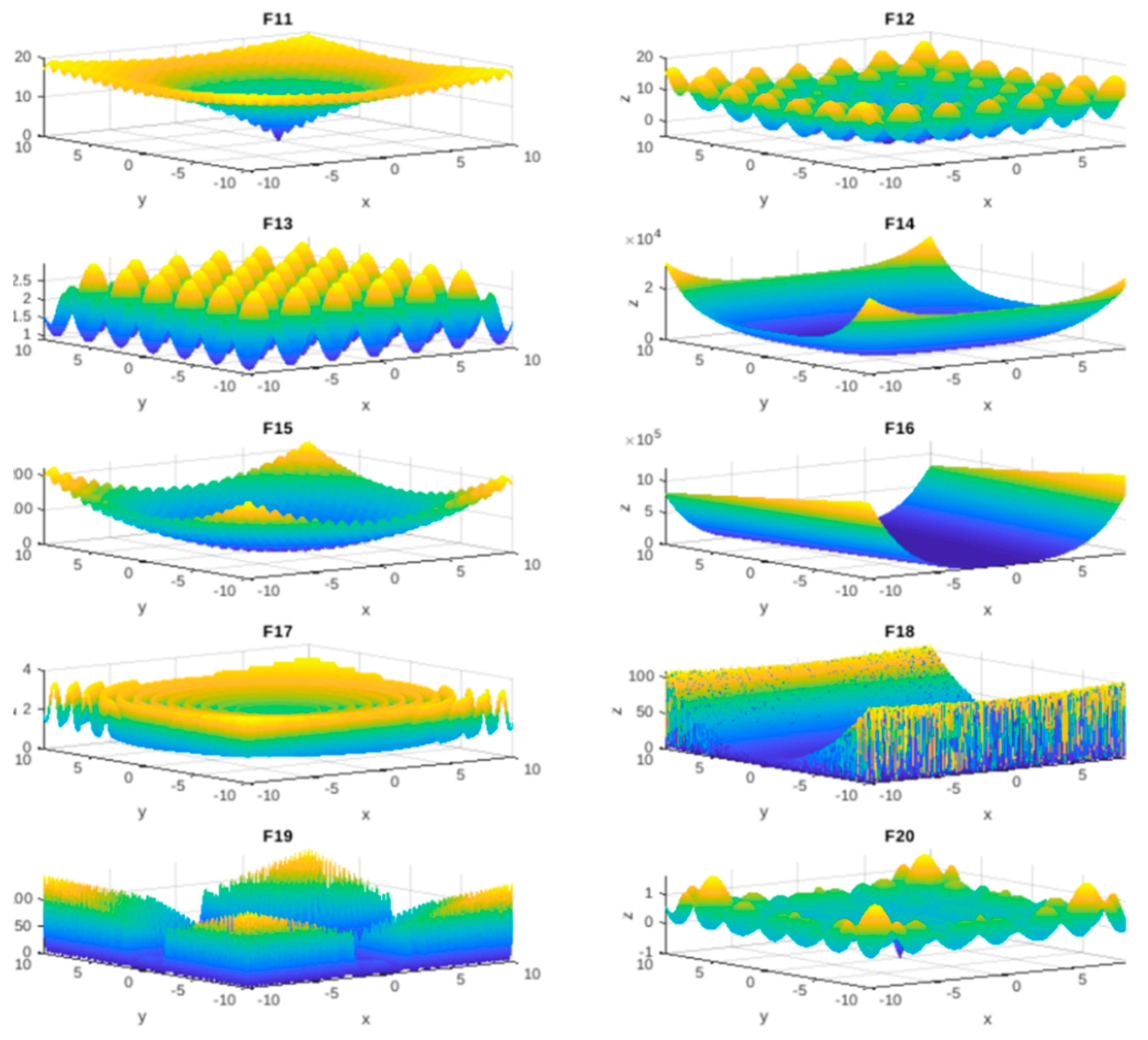
| F11 | Ackley | X | X | X | X | X | ||||||
| F12 | Ackley N. 4 | X | X | X | X | X | ||||||
| F13 | Periodic | X | X | X | X | X | X | |||||
| F14 | Quartic | X | X | X | X | X | X | |||||
| F15 | Rastrigin | X | X | X | X | X | X | |||||
| F16 | Rosenbrock | X | X | X | X | X | X | |||||
| F17 | Salomon | X | X | X | X | X | X | |||||
| F18 | Xin-She Yang | X | X | X | X | X | ||||||
| F19 | Xin-She Yang N. 2 | X | X | X | X | X | ||||||
| F20 | Xin-She Yang N. 4 | X | X | X | X | X |
| ID | Function | Dim | Interval | |
|---|---|---|---|---|
| F1 | 30 | [−1, 4] | 0 | |
| F2 | 30 | [−600, 600] | 0 | |
| F3 | 30 | [−100, 100] | 0 | |
| F4 | 30 | [−100, 100] | 0 | |
| F5 | 30 | [−100, 100] | 0 | |
| F6 | 30 | [−10, 10] | 0 | |
| F7 | 30 | [−5.12, 5.12] | 0 | |
| F8 | 30 | [−10, 10] | 0 | |
| F9 | 30 | [−2π, 2π], m = 5, β = 15 | −1 | |
| F10 | 30 | [−5, 10] | 0 | |
| F11 | 30 | [−32, 32], a = 20, b = 0.3, c = 2π | 0 | |
| F12 | 2 | [−35, 35] | −5.901 × 1014 | |
| F13 | 30 | [−10, 10] | 0.9 | |
| F14 | 30 | [−1.28, 1.28] | 0 + random noise | |
| F15 | 30 | [−5.12, 5.12] | 0 | |
| F16 | 30 | [−5, 10] | 0 | |
| F17 | 30 | [−100, 100] | 0 | |
| F18 | 30 | [−5, 5], random | 0 | |
| F19 | 30 | [−2π, 2π] | 0 | |
| F20 | 30 | [−10, 10] | −1 |


References
- Kumar, A. Application of nature-inspired computing paradigms in optimal design of structural engineering problems—A review. Nat.-Inspired Comput. Paradig. Syst. 2021, 63–74. [Google Scholar] [CrossRef]
- Shaukat, N.; Ahmad, A.; Mohsin, B.; Khan, R.; Khan, S.U.-D.; Khan, S.U.-D. Multiobjective Core Reloading Pattern Optimization of PARR-1 Using Modified Genetic Algorithm Coupled with Monte Carlo Methods. Sci. Technol. Nucl. Install. 2021, 2021, 1–13. [Google Scholar] [CrossRef]
- Lodewijks, G.; Cao, Y.; Zhao, N.; Zhang, H. Reducing CO₂ Emissions of an Airport Baggage Handling Transport System Using a Particle Swarm Optimization Algorithm. IEEE Access 2021, 9, 121894–121905. [Google Scholar] [CrossRef]
- Malik, H.; Iqbal, A.; Joshi, P.; Agrawal, S.; Bakhsh, F.I. (Eds.) Metaheuristic and Evolutionary Computation: Algorithms and Applications; Springer: Berlin/Heidelberg, Germany, 2021; Volume 916. [Google Scholar] [CrossRef]
- Elaziz, M.A.; Dahou, A.; Abualigah, L.; Yu, L.; Alshinwan, M.; Khasawneh, A.M.; Lu, S. Advanced metaheuristic optimization techniques in applications of deep neural networks: A review. Neural Comput. Appl. 2021, 33, 14079–14099. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef] [Green Version]
- Ho, Y.; Pepyne, D. Simple Explanation of the No-Free-Lunch Theorem and Its Implications. J. Optim. Theory Appl. 2002, 115, 549–570. [Google Scholar] [CrossRef]
- Mirjalili, S.; Song Dong, J.; Lewis, A.; Sadiq, A.S. Particle Swarm Optimization: Theory, Literature Review, and Application in Airfoil Design. In Nature-Inspired Optimizers: Theories, Literature Reviews and Applications; Mirjalili, S., Song Dong, J., Lewis, A., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 167–184. [Google Scholar]
- Castelli, M.; Manzoni, L.; Mariot, L.; Nobile, M.S.; Tangherloni, A. Salp Swarm Optimization: A critical review. Expert Syst. Appl. 2021, 189, 116029. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Braik, M.S. Chameleon Swarm Algorithm: A bio-inspired optimizer for solving engineering design problems. Expert Syst. Appl. 2021, 174, 114685. [Google Scholar] [CrossRef]
- Jiang, Y.; Wu, Q.; Zhu, S.; Zhang, L. Orca predation algorithm: A novel bio-inspired algorithm for global optimization problems. Expert Syst. Appl. 2021, 188, 116026. [Google Scholar] [CrossRef]
- Abdollahzadeh, B.; Gharehchopogh, F.S.; Mirjalili, S. African vultures optimization algorithm: A new nature-inspired metaheuristic algorithm for global optimization problems. Comput. Ind. Eng. 2021, 158, 107408. [Google Scholar] [CrossRef]
- Peraza-Vázquez, H.; Peña-Delgado, A.F.; Echavarría-Castillo, G.; Morales-Cepeda, A.B.; Velasco-Álvarez, J.; Ruiz-Perez, F. A Bio-Inspired Method for Engineering Design Optimization Inspired by Dingoes Hunting Strategies. Math. Probl. Eng. 2021, 2021, 1–19. [Google Scholar] [CrossRef]
- Peña-Delgado, A.F.; Peraza-Vázquez, H.; Almazán-Covarrubias, J.H.; Cruz, N.T.; García-Vite, P.M.; Morales-Cepeda, A.B.; Ramirez-Arredondo, J.M. A novel bio-inspired algorithm applied to selective harmonic elimination in a three-phase eleven-level inverter. Math. Probl. Eng. 2020, 2020, 1–10. [Google Scholar] [CrossRef]
- Naruei, I.; Keynia, F. A new optimization method based on COOT bird natural life model. Expert Syst. Appl. 2021, 183, 115352. [Google Scholar] [CrossRef]
- Villuendas-Rey, Y.; Velázquez-Rodríguez, J.; Alanis-Tamez, M.; Moreno-Ibarra, M.-A.; Yáñez-Márquez, C. Mexican Axolotl Optimization: A Novel Bioinspired Heuristic. Mathematics 2021, 9, 781. [Google Scholar] [CrossRef]
- Mohammadi-Balani, A.; Nayeri, M.D.; Azar, A.; Taghizadeh-Yazdi, M. Golden eagle optimizer: A nature-inspired metaheuristic algorithm. Comput. Ind. Eng. 2021, 152, 107050. [Google Scholar] [CrossRef]
- Abualigah, L.; Shehab, M.; Alshinwan, M.; Mirjalili, S.; Elaziz, M.A. Ant Lion Optimizer: A Comprehensive Survey of Its Variants and Applications. Arch. Comput. Methods Eng. 2021, 28, 1397–1416. [Google Scholar] [CrossRef]
- Salehan, A.; Deldari, A. Corona virus optimization (CVO): A novel optimization algorithm inspired from the Corona virus pandemic. J. Supercomput. 2021. [Google Scholar] [CrossRef]
- Hashim, F.A.; Hussain, K.; Houssein, E.H.; Mabrouk, M.S.; Al-Atabany, W. Archimedes optimization algorithm: A new metaheuristic algorithm for solving optimization problems. Appl. Intell. 2021, 51, 1531–1551. [Google Scholar] [CrossRef]
- Abualigah, L.; Diabat, A.; Mirjalili, S.; Elaziz, M.A.; Gandomi, A.H. The Arithmetic Optimization Algorithm. Comput. Methods Appl. Mech. Eng. 2021, 376, 113609. [Google Scholar] [CrossRef]
- Ahmadianfar, I.; Bozorg-Haddad, O.; Chu, X. Gradient-based optimizer: A new metaheuristic optimization algorithm. Inf. Sci. 2020, 540, 131–159. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, H.; Heidari, A.A.; Gandomi, A.H. Hunger games search: Visions, conception, implementation, deep analysis, perspectives, and towards performance shifts. Expert Syst. Appl. 2021, 177, 114864. [Google Scholar] [CrossRef]
- Hashim, F.A.; Houssein, E.H.; Mabrouk, M.S.; Al-Atabany, W.; Mirjalili, S. Henry gas solubility optimization: A novel physics-based algorithm. Future Gener. Comput. Syst. 2019, 101, 646–667. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H. Harris hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Singh, S.; Tiwari, A.; Agrawal, S. Differential Evolution Algorithm for Multimodal Optimization: A Short Survey. In Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2021; pp. 745–756. [Google Scholar]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.-L.; Yang, J.; Zhong, J.; Wang, S. Genetic programming with separability detection for symbolic regression. Complex Intell. Syst. 2021, 7, 1185–1194. [Google Scholar] [CrossRef]
- Sang, X.; Liu, X.; Zhang, Z.; Wang, L. Improved Biogeography-Based Optimization Algorithm by Hierarchical Tissue-Like P System with Triggering Ablation Rules. Math. Probl. Eng. 2021, 2021, 1–24. [Google Scholar] [CrossRef]
- Fu, Y.; Zhou, M.; Guo, X.; Qi, L.; Sedraoui, K. Multiverse Optimization Algorithm for Stochastic Biobjective Disassembly Sequence Planning Subject to Operation Failures. In Proceedings of the Transactions on System, Man, and Cybernetics: Systems, Virtual. 17–20 October 2021. [Google Scholar] [CrossRef]
- Kaur, A.; Kumar, Y. A new metaheuristic algorithm based on water wave optimization for data clustering. Evol. Intell. 2021, 1–25. [Google Scholar] [CrossRef]
- Kaveh, A.; Dadras, A. A novel meta-heuristic optimization algorithm: Thermal exchange optimization. Adv. Eng. Softw. 2017, 110, 69–84. [Google Scholar] [CrossRef]
- Kaveh, A. Advances in Metaheuristic Algorithms for Optimal Design of Structures; Springer: Cham, Switzerland, 2021. [Google Scholar] [CrossRef]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A new heuristic optimization algorithm: Harmony search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Abbasi, M.; Abbasi, E.; Mohammadi-Ivatloo, B. Single and multi-objective optimal power flow using a new differen-tial-based harmony search algorithm. J. Ambient. Intell. Humaniz. Comput. 2020, 12, 851–871. [Google Scholar] [CrossRef]
- Braik, M.; Ryalat, M.H.; Al-Zoubi, H. A novel meta-heuristic algorithm for solving numerical optimization problems: Ali Baba and the forty thieves. Neural Comput. Appl. 2021, 1–47. [Google Scholar] [CrossRef]
- Qi, Y.; Liu, J.; Yu, J. A Fireworks algorithm based path planning method for amphibious robot. In Proceedings of the 2021 IEEE International Conference on Real-time Computing and Robotics (RCAR), Xining, China, 15–19 July 2021. [Google Scholar] [CrossRef]
- Tan, Y.; Zhu, Y. Fireworks Algorithm for Optimization. In Lecture Notes in Computer Science; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2010; pp. 355–364. [Google Scholar]
- Osaba, E.; Yang, X.-S. Soccer-Inspired Metaheuristics: Systematic Review of Recent Research and Applications. Appl. Optim. Swarm Intell. 2021, 81–102. [Google Scholar] [CrossRef]
- Gabis, A.B.; Meraihi, Y.; Mirjalili, S.; Ramdane-Cherif, A. A comprehensive survey of sine cosine algorithm: Variants and applications. Artif. Intell. Rev. 2021, 54, 5469–5540. [Google Scholar] [CrossRef] [PubMed]
- Talatahari, S.; Azizi, M. Chaos Game Optimization: A Novel Metaheuristic Algorithm; Springer: Berlin/Heidelberg, Germany, 2021; Volume 54. [Google Scholar] [CrossRef]
- Sasmito, A.; Pratiwi, A.B. Stochastic fractal search algorithm in permutation flowshop scheduling problem. In Proceedings of the International Conference on Mathematics, Computational Sciences and Statistics 2020, Online. 29 September 2020; Volume 2329, p. 050003. [Google Scholar] [CrossRef]
- Karami, H.; Sanjari, M.J.; Gharehpetian, G.B. Hyper-Spherical Search (HSS) algorithm: A novel meta-heuristic algorithm to optimize nonlinear functions. Neural Comput. Appl. 2014, 25, 1455–1465. [Google Scholar] [CrossRef]
- Aguilar-Arguello, S.; Taylor, A.H.; Nelson, X.J. Jumping spiders attend to information from multiple modalities when preparing to jump. Anim. Behav. 2021, 171, 99–109. [Google Scholar] [CrossRef]
- Göttler, C. Locomotion of Spiders—What Robotics can Learn from Spiders and Vice Versa. Ph.D. Thesis, ETH Zurich, Zurich, Switzerland, 2021. [Google Scholar] [CrossRef]
- Brandt, E.E.; Sasiharan, Y.; Elias, D.O.; Mhatre, N. Jump takeoff in a small jumping spider. J. Comp. Physiol. A 2021, 207, 153–164. [Google Scholar] [CrossRef] [PubMed]
- GitHub-Mazhar-Ansari-Ardeh/BenchmarkFcns: A Collection of Mathematical Test Functions for Benchmarking Optimization Algorithms. Available online: https://github.com/mazhar-ansari-ardeh/BenchmarkFcns (accessed on 20 October 2021).
- Suganthan, P.N.; Hansen, N.; Liang, J.J.; Deb, K.; Chen, Y.P.; Auger, A.; Tiwari, S. Problem Definitions and Evaluation Criteria for the CEC 2005 Special Session on Real-Parameter Optimization; Nanyang Technological University: Singapore, 2005. [Google Scholar]
- Kumar, A.; Wu, G.; Ali, M.Z.; Mallipeddi, R.; Suganthan, P.N.; Das, S. A test-suite of non-convex constrained optimization problems from the real-world and some baseline results. Swarm Evol. Comput. 2020, 56, 100693. [Google Scholar] [CrossRef]
- Vazquez, H.P.; Torres-Huerta, A.M.; Flores-Vela, A. Self-Adaptive Differential Evolution Hyper-Heuristic with Applications in Process Design. Comput. Sist. 2016, 20, 173–193. [Google Scholar] [CrossRef]
- Jain, N.; Parmar, G.; Gupta, R.; Khanam, I. Performance evaluation of GWO/PID approach in control of ball hoop system with different objective functions and perturbation. Cogent Eng. 2018, 5, 1465328. [Google Scholar] [CrossRef]


















| Algorithms | Parameter | Value |
|---|---|---|
| for All Algorithms | Population Size for All Problems Maximum Iterations for Testbench Functions Number of Replications for Testbench Functions Maximum Iterations for Real-World Problems | 30 200 30 100 |
| JSOA | Does not use additional parameters | − |
| CGO | Does not use additional parameters | − |
| COOT | Does not use additional parameters | − |
| GEO | pa: Propensity to attack pc: Propensity to croise | [0.5, 2.0] [1.0, 0.5] |
| MAO | Crossover probability (cop) Damage probability (dp) Regeneration probability (rp) Tournament size (k) Lamba value (λ) | 0.5 0.5 0.1 2 0.5 |
| AOA | Object Number C1 = 2, C2 = 6 C3 = 2 and C4 = 0.5 (CEC and engineering problems) | 30 |
| ArOA | α µ | 5 0.5 |
| GBO | βmin, βmax | 0.2, 0.6 0.5 |
| HGSO | Gases number Cluster number M1 and M2 β, α, and K l1, l2 and l3 are constants fixed for benchmark function l1, l2 and l3 are constants fixed for engineering problems. | 50 5 0.1, 0.2 1, 1, 1 5 × 10−3, 100, 1 × 10−2 1, 10, 1 |
| HHO | Harris Hawk Number E0 variable changes from −1 to 1 (Default) | 30 |
| HGS | Does not use additional parameters | - |
| Algorithms | ||||||||||||||||
| JSOA | COOT | CGO | MAO | GEO | ||||||||||||
| F | Best | Ave | Std | Best | Ave | Std | Best | Ave | Std | Best | Ave | Std | Best | Ave | Std | |
| F1 | 0 | 4.1113 × 10−76 | 8.36 × 10−67 | 2.74 × 10−66 | 1.44 × 10−11 | 2.62 × 10−11 | 1.0 × 10−11 | 1.36 × 10−8 | 1.87 × 10−5 | 4.4 × 10−5 | 1.98 × 102 | 2.77 × 104 | 5.96 × 104 | 4.30 × 10−1 | 7.05 × 10−1 | 2.7 × 10−1 |
| F2 | 0 | 0.0000 | 0.0000 | 0.0000 | 1.32 × 10−8 | 3.20 × 10−8 | 1.61 × 10−7 | 0.0000 | 5.54 × 102 | 9.16 × 10−2 | 7.98 × 10 | 3.04 × 102 | 8.31 × 10 | 1.05 × 100 | 1.11 × 10 | 5.2 × 10−2 |
| F3 | 0 | 3.54 × 10−51 | 5.54 × 10−39 | 1.90 × 10−38 | 1.9910 × −5 | 4.13 × 10−4 | 2.07 × 10−3 | 2.32 × 10−11 | 2.80 × 10−1 | 3.60 × 10−1 | 4.92 × 102 | 7.80 × 102 | 1.14 × 102 | 1.06 × 10 | 2.83 × 10 | 1.19 × 10 |
| F4 | 0 | 0.0000 | 5.35 × 10−40 | 2.02 × 10−39 | 1.04 × 10−4 | 3.31 × 10−5 | 1.57 × 10−4 | 5.22 × 10−2 | 1.91 × 10−2 | 1.81 × 10−2 | 5.79 × 10 | 7.52 × 10 | 6.9105 | 3.1912 | 5.5714 | 1.3723 |
| F5 | 0 | 4.448 × 10−45 | 4.448 × 10−45 | 1.390 × 10−39 | 1.85 × 10−5 | 5.55 × 10−1 | 3.04123 | 4.97 × 10−14 | 3.79 × 10−1 | 3.80 × 10−1 | 7.37 × 1026 | 3.59 × 1038 | 1.47 × 1039 | 1.10 × 102 | 1.06 × 107 | 5.80 × 107 |
| F6 | 0 | 0.0000 | 5.87 × 10−296 | 0.0000 | 3.14 × 10−44 | 1.05 × 10−45 | 5.7 × 10−45 | 1.77 × 10−24 | 4.21 × 10−23 | 2.1 × 10−22 | 2.78 × 107 | 6.68 × 108 | 7.15 × 108 | 1.25 × 10−6 | 2.50 × 10−3 | 8.2 × 10−3 |
| F7 | 0 | 9.12 × 10−79 | 3.61 × 10−66 | 1.46 × 10−65 | 3.43 × 10−11 | 9.72 × 10−9 | 5.30 × 10−8 | 1.93 × 10−4 | 4.02 × 10−5 | 5.58 × 10−5 | 3.91 × 10 | 9.40 × 10 | 2.57 × 10 | 1.53 × 10−2 | 3.63 × 10−2 | 2.3 × 10−2 |
| F8 | 0 | 1.57 × 10−80 | 1.20 × 10−66 | 4.30 × 10−66 | 8.69 × 10−7 | 2.90 × 10−8 | 1.59 × 10−7 | 1.17 × 10−3 | 4.40 × 10−3 | 1.54 × 10−2 | 1.90 × 103 | 4.94 × 103 | 1.27 × 103 | 1.86 × 10 | 7.48 × 10 | 3.87 × 10 |
| F9 | −1 | −1.0000 | −1.0000 | 0.0000 | −1.0000 | −2.64 × 10−1 | 9.92 × 10−1 | −1.0000 | −1.0000 | 7.43 × 10−5 | 9.99 × 10−1 | 9.99 × 10−1 | 1.36 × 10−4 | 9.95 × 10−1 | 9.95 × 10−1 | 4.9 × 10−6 |
| F10 | 0 | 3.78 × 10−74 | 4.93 × 10−62 | 2.62 × 10−61 | 2.98 × 10−10 | 8.12 × 10 | 4.45 × 10 | 4.16 × 10−2 | 9.55 × 10−1 | 3.78 × 10 | 4.60 × 107 | 6.59 × 107 | 2.34 × 108 | 2.55 × 10 | 5.42 × 10 | 1.80 × 10 |
| F11 | 0 | −8.88 × 10−16 | −8.88 × 10−16 | 0.0000 | 2.40 × 10−6 | 1.82 × 10−4 | 9.85 × 10−4 | −8.88 × 10−16 | 2.28 × 10−2 | 2.14 × 10−2 | 1.78 × 10 | 1.91 × 10 | 7.81 × 10−1 | 1.6900 | 2.4800 | 4.0 × 10−1 |
| F12 | −4.59 | −4.5900 | −4.5900 | 1.29 × 10−15 | −4.5900 | −4.5900 | 1.60 × 10−3 | −4.5900 | −4.4200 | 2.24 × 10−1 | −4.0600 | 4.09 × 10−1 | 2.8200 | 1.78 × 102 | 2.89 × 102 | 5.21 × 10 |
| F13 | 0.9 | 0.9000 | 0.9000 | 4.52 × 10−16 | 0.9000 | 1.5100 | 1.3400 | 0.9000 | 9.00 × 10−1 | 3.39 × 10−4 | 8.7700 | 9.5700 | 9.94 × 10−1 | 1.9600 | 4.8400 | 1.8300 |
| F14 | 0 | 1.70 × 10−6 | 4.46 × 10−4 | 4.01 × 10−4 | 1.93 × 10−3 | 1.53 × 10−2 | 1.13 × 10−2 | 2.21 × 10−4 | 5.56 × 10−3 | 4.07 × 10−3 | 3.53 × 10 | 3.93 × 10 | 2.49 × 10 | 2.42 × 10−2 | 4.94 × 10−2 | 2.2 × 10−2 |
| F15 | 0 | 0.0000 | 0.0000 | 0.0000 | 1.05 × 10−5 | 1.74 × 10−4 | 9.41 × 10−4 | 2.06 × 10−3 | 4.84 × 10−3 | 5.07 × 10−3 | 2.89 × 102 | 3.45 × 102 | 3.68 × 10 | 2.98 × 10 | 7.61 × 10 | 3.62 × 10 |
| F16 | 0 | 5.33 × 10−21 | 3.32 × 10−1 | 7.32 × 10−1 | 2.88 × 10 | 3.17 × 10 | 9.6600 | 1.23 × 10−6 | 2.49 × 10−3 | 3.78 × 10−3 | 2.36 × 104 | 7.18 × 104 | 3.02 × 104 | 3.14 × 10 | 3.99 × 10 | 1.05 × 10 |
| F17 | 0 | 2.17 × 10−45 | 3.40 × 10−38 | 4.32 × 10−38 | 9.99 × 10−2 | 7.56 × 10−2 | 4.32 × 10−2 | 5.21 × 10−9 | 8.54 × 10−2 | 8.10 × 10−2 | 1.43 × 10 | 1.83 × 10 | 2.5200 | 1.1100 | 1.6000 | 2.3 × 10−1 |
| F18 | 0 | 3.85 × 10−40 | 3.16 × 10−28 | 9.61 × 10−28 | 1.73 × 10−3 | 7.43 × 10−5 | 3.17 × 10−4 | 2.26 × 10−4 | 2.63 × 10−4 | 3.60 × 10−4 | 1.28 × 107 | 5.60 × 1011 | 2.68 × 1012 | 4.83 × 10−4 | 1.07 × 10−2 | 2.5 × 10−2 |
| F19 | 0 | 0.0000 | 1.17 × 10−13 | 6.41 × 10−13 | 1.91 × 10−11 | 7.39 × 10−12 | 5.4 × 10−12 | 3.51 × 10−12 | 3.51 × 10−12 | 1.1 × 10−15 | 1.54 × 10−4 | 5.31 × 10−4 | 6.99 × 10−4 | 3.01 × 10−11 | 4.78 × 10−10 | 2.4 × 10−9 |
| F20 | −1 | −1.0000 | −1.0000 | 0.0000 | −9.99 × 10−1 | −4.91 × 10−1 | 4.88 × 10−1 | −1.0000 | −9.55 × 10−1 | 4.19 × 10−2 | 3.31 × 10−9 | 4.35 × 10−9 | 3.71 × 10−9 | 6.08 × 10−13 | 6.60 × 10−13 | 2.1 × 10−13 |
| Algorithms | ||||||||||||||||
| AOA | GBO | HGSO | ||||||||||||||
| Best | Ave | Std. | Best | Ave | Std. | Best | Ave | Std. | ||||||||
| F1 | 6.40 × 10−35 | 1.87 × 10−33 | 6.02 × 10−33 | 1.11 × 10−44 | 1.13 × 10−42 | 5.34 × 10−42 | 1.14 × 10−72 | 1.27 × 10−61 | 6.97 × 10−61 | |||||||
| F2 | 0.0000 | 4.17 × 10−3 | 2.29 × 10−2 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |||||||
| F3 | 5.84 × 10−17 | 8.53 × 10−17 | 2.64 × 10−16 | 3.96 × 10−21 | 3.35 × 10−17 | 8.92 × 10−17 | 5.04 × 10−41 | 1.53 × 10−33 | 8.09 × 10−33 | |||||||
| F4 | 6.15 × 10−19 | 2.81 × 10−16 | 7.59 × 10−16 | 1.07 × 10−17 | 2.73 × 10−17 | 1.35 × 10−16 | 3.00 × 10−31 | 2.30 × 10−28 | 1.26 × 10−27 | |||||||
| F5 | 1.02 × 10−21 | 4.53 × 10−17 | 1.72 × 10−16 | 1.59 × 10−20 | 2.07 × 10−18 | 4.19 × 10−18 | 6.95 × 10−41 | 5.22 × 10−35 | 2.67 × 10−34 | |||||||
| F6 | 5.69 × 10−149 | 1.88 × 10−147 | 1.03 × 10−146 | 2.21 × 10−178 | 4.10 × 10−174 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |||||||
| F7 | 7.26 × 10−48 | 3.96 × 10−34 | 2.04 × 10−33 | 7.29 × 10−45 | 2.01 × 10−41 | 7.12 × 10−41 | 2.5010−77 | 1.46 × 10−61 | 7.99 × 10−61 | |||||||
| F8 | 3.03 × 10−43 | 3.38 × 10−34 | 9.76 × 10−34 | 2.02 × 10−39 | 2.45 × 10−37 | 8.83 × 10−37 | 5.72 × 10−75 | 1.43 × 10−56 | 7.86 × 10−56 | |||||||
| F9 | 0.0000 | 0.0000 | 0.0000 | −1.0000 | −1.0000 | 1.04 × 10−10 | 0.0000 | 0.0000 | 0.0000 | |||||||
| F10 | 6.89 × 10−12 | 1.84 × 10−7 | 1.01 × 10−6 | 4.63 × 10−29 | 4.75 × 10−25 | 1.95 × 10−24 | 3.45 × 10−29 | 8.63 × 10−21 | 4.72 × 10−20 | |||||||
| F11 | 2.00 × 10 | 1.93 × 10 | 3.6500 | −8.88 × 10−16 | −8.88 × 10−16 | 0.0000 | −8.88 × 10−16 | −4.14 × 10−16 | 1.23 × 10−15 | |||||||
| F12 | −4.5100 | −4.5500 | 5.00 × 10−2 | −4.5900 | −4.5900 | 1.81 × 10−15 | −4.5900 | −4.5100 | 2.22 × 10−1 | |||||||
| F13 | 6.0300 | 7.6100 | 1.6200 | 9.00 × 10−1 | 9.11 × 10−1 | 4.26 × 10−2 | 8.4400 | 8.4700 | 3.0400 | |||||||
| F14 | 1.33 × 10−3 | 2.44 × 10−3 | 1.58 × 10−3 | 3.12 × 10−3 | 3.02 × 10−3 | 2.56 × 10−3 | 3.37 × 10−4 | 8.49 × 10−4 | 7.63 × 10−4 | |||||||
| F15 | 1.70 × 102 | 5.6900 | 3.12 × 10 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |||||||
| F16 | 2.89 × 10 | 2.89 × 10 | 8.71 × 10−2 | 2.79 × 10 | 2.68 × 10 | 6.48 × 10−1 | 2.77 × 10 | 2.86 × 10 | 3.41 × 10−1 | |||||||
| F17 | 2.00 × 10−1 | 1.10 × 10−1 | 3.05 × 10−2 | 1.49 × 10−6 | 6.76 × 10−3 | 2.53 × 10−2 | 9.99 × 10−2 | 1.01 × 10−1 | 9.53 × 10−4 | |||||||
| F18 | 1.18 × 10−10 | 9.89 × 10−5 | 4.14 × 10−4 | 5.54 × 10−24 | 5.48 × 10−11 | 2.62 × 10−10 | 4.22 × 10−33 | 3.3810−28 | 1.52 × 10−27 | |||||||
| F19 | 3.36 × 10−11 | 2.90 × 10−11 | 3.12 × 10−12 | 3.53 × 10−12 | 4.34 × 10−12 | 1.89 × 10−12 | 3.38 × 10−11 | 3.38 × 10−11 | 2.63 × 10−26 | |||||||
| F20 | 4.77 × 10−11 | 6.09 × 10−11 | 2.70 × 10−11 | −1.0000 | −1.0000 | 1.08 × 10−3 | 6.21 × 10−10 | 4.07 × 10−10 | 2.31 × 10−10 | |||||||
| Algorithms | ||||||||||||||||
| HHO | HGS | ArOA | ||||||||||||||
| Best | Ave | Std. | Best | Ave | Std. | Best | Ave | Std. | ||||||||
| F1 | 7.70 × 10−51 | 6.49 × 10−43 | 3.48 × 10−42 | 1.93 × 10−60 | 8.17 × 10−54 | 3.12 × 10−53 | 2.31 × 10−1 | 5.1800 | 1.8400 | |||||||
| F2 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 1.15 × 10−2 | 4.90 × 10−1 | 2.90 × 10−1 | |||||||
| F3 | 1.45 × 10−20 | 3.01 × 10−20 | 1.22 × 10−19 | 1.95 × 10−26 | 1.93 × 10−23 | 5.41 × 10−23 | 2.45 × 10−31 | 7.30 × 10−12 | 2.85 × 10−11 | |||||||
| F4 | 6.63 × 10−24 | 1.12 × 10−20 | 4.14 × 10−20 | 3.17 × 10−20 | 2.47 × 10−13 | 1.35 × 10−12 | 5.81 × 10−20 | 3.28 × 10−2 | 1.84 × 10−2 | |||||||
| F5 | 9.14 × 10−23 | 3.76 × 10−19 | 1.95 × 10−18 | 2.66 × 10−26 | 6.74 × 10−20 | 6.74 × 10−20 | 1.52 × 10−32 | 1.43 × 10−10 | 5.07 × 10−10 | |||||||
| F6 | 3.42 × 10−233 | 4.96 × 10−212 | 0.0000 | 0.0000 | 7.22 × 10−88 | 3.96 × 10−87 | 0.0000 | 0.0000 | 0.0000 | |||||||
| F7 | 1.93 × 10−51 | 3.26 × 10−41 | 1.19 × 10−40 | 9.00 × 10−63 | 7.46 × 10−25 | 4.08 × 10−24 | 0.0000 | 0.0000 | 0.0000 | |||||||
| F8 | 2.49 × 10−57 | 5.81 × 10−42 | 1.51 × 10−41 | 1.57 × 10−68 | 3.45 × 10−27 | 1.89 × 10−26 | 0.0000 | 3.40 × 10−205 | 0.0000 | |||||||
| F9 | −1.0000 | −1.0000 | 0.0000 | −1.0000 | −6.01 × 10−1 | 8.12 × 10−1 | −1.0000 | −7.34 × 10−1 | 6.91 × 10−1 | |||||||
| F10 | 1.43 × 10−22 | 1.09 × 10−10 | 4.45 × 10−10 | 2.26 × 10−13 | 5.50 × 10 | 9.98 × 10 | 2.11 × 102 | 3.89 × 102 | 9.14 × 10 | |||||||
| F11 | −8.88 × 10−16 | −8.88 × 10−16 | 0.0000 | −8.88 × 10−16 | 2.90 × 10−15 | 1.56 × 10−14 | −8.88 × 10−16 | −7.70 × 10−16 | 6.49 × 10−16 | |||||||
| F12 | −4.5900 | −4.5900 | 3.69 × 10−5 | −4.5900 | −4.5600 | 1.61 × 10−1 | −4.5900 | −4.5900 | 1.46 × 10−5 | |||||||
| F13 | 9.00 × 10−1 | 9.00 × 10−1 | 4.52 × 10−16 | 9.00 × 10−1 | 9.00 × 10−1 | 6.49 × 10−16 | 9.00 × 10−1 | 9.00 × 10−1 | 4.52 × 10−16 | |||||||
| F14 | 3.28 × 10−4 | 4.82 × 10−4 | 6.36 × 10−4 | 4.8610 × −4 | 5.78 × 10−3 | 9.35 × 10−3 | 3.24 × 10−6 | 1.42 × 10−4 | 1.42 × 10−4 | |||||||
| F15 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | |||||||
| F16 | 1.06 × 10−2 | 4.64 × 10−2 | 6.23 × 10−2 | 7.63 × 10−2 | 1.82 × 10 | 1.26 × 10 | 2.87 × 10 | 2.88 × 10 | 3.76 × 10−2 | |||||||
| F17 | 4.48 × 10−23 | 1.68 × 10−20 | 7.96 × 10−20 | 5.28 × 10−28 | 1.43 × 10−2 | 4.34 × 10−2 | 9.99 × 10−2 | 9.99 × 10−2 | 1.88 × 10−7 | |||||||
| F18 | 2.34 × 10−29 | 1.45 × 10−10 | 7.83 × 10−10 | 4.02 × 10−11 | 2.61 × 10−3 | 8.28 × 10−3 | 0.0000 | 0.0000 | 0.0000 | |||||||
| F19 | 3.51 × 10−12 | 3.57 × 10−12 | 2.40 × 10−13 | 3.54 × 10−12 | 1.38 × 10−11 | 1.02 × 10−11 | 1.58 × 10−7 | 7.8610 × 10−5 | 1.55 × 10−4 | |||||||
| F20 | −1.0000 | −1.0000 | 0.0000 | −1.0000 | −2.98 × 10−1 | 4.63 × 10−1 | 1.22 × 10−8 | 1.43 × 10−7 | 1.13 × 10−7 | |||||||
| Algorithms | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| CGA | COOT | GEO | MAO | AOA | GBO | HGSO | HHO | HGS | ArOA | |
| F1 | 1.929 × 10−3 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 1.09 × 10−10 | 3.02 × 10−11 | 1.018 × 10−1 | 3.02 × 10−11 |
| F2 | 1.306 × 10−7 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 4.193 × 10−2 | NaN | NaN | NaN | NaN | 1.21 × 10−12 |
| F3 | 1.791 × 10−2 | 3.01 × 10−11 | 3.01 × 10−11 | 3.01 × 10−11 | 3.01 × 10−11 | 3.01 × 10−11 | 2.708 × 10−2 | 3.01 × 10−11 | 1.253 × 10−2 | 3.01 × 10−11 |
| F4 | 6.708 × 10−5 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.112 × 10−1 | 3.02 × 10−11 | 6.710 × 10−5 | 3.02 × 10−11 |
| F5 | 2.195 × 10−2 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 6.669 × 10−3 | 3.02 × 10−11 | 3.261 × 10−1 | 3.02 × 10−11 |
| F6 | 2.548 × 10−3 | 1.249 × 10−6 | 1.249 × 10−6 | 1.249 × 10−6 | 1.249 × 10−6 | 1.249 × 10−6 | 1.045 × 10−3 | 1.249 × 10−6 | 3.361 × 10−1 | 1.152 × 10−4 |
| F7 | 3.947 × 10−4 | 3.02 × 10−11 | 3.02 × 10−11 | 3.020 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 7.043 × 10−7 | 3.02 × 10−11 | 7.952 × 10−1 | 1.21 × 10−12 |
| F8 | 3.947 × 10−4 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 5.07 × 10−10 | 3.02 × 10−11 | 9.941 × 10−1 | 1.52 × 10−10 |
| F9 | 1.09 × 10−12 | 3.90 × 10−13 | 1.09 × 10−12 | 1.21 × 10−12 | 1.68 × 10−14 | NaN | 5.63 × 10−13 | NaN | NaN | 2.157 × 10−2 |
| F10 | 2.72 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 6.710 × 10−5 | 3.02 × 10−11 |
| F11 | 1.13 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 4.61 × 10−13 | NaN | 3.337 × 10−1 | NaN | 3.337 × 10−1 | 3.337 × 10−1 |
| F12 | 3.96 × 10−11 | 2.33 × 10−11 | 2.36 × 10−12 | 2.95 × 10−12 | 6.02 × 10−11 | 1.608 × 10−1 | 5.42 × 10−11 | 1.124 × 10−9 | 1.608 × 10−1 | 1.019 × 10−9 |
| F13 | 5.852 × 10−9 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 2.158 × 10−2 | 5.90 × 10−10 | NaN | NaN | NaN |
| F14 | 9.75 × 10−10 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 1.473 × 10−7 | 7.088 × 10−8 | 7.172 × 10−1 | 3.711 × 10−1 | 5.012 × 10−2 | 9.514 × 10−6 |
| F15 | 3.453 × 10−7 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 4.193 × 10−2 | NaN | NaN | NaN | NaN | NaN |
| F16 | 1.413 × 10−1 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 6.100 × 10−1 | 2.491 × 10−6 | 3.02 × 10−11 |
| F17 | 9.460 × 10−6 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.351 × 10−5 | 3.02 × 10−11 |
| F18 | 2.691 × 10−2 | 3.02 × 10−11 | 3.02 × 10−11 | 3.02 × 10−11 | 3.69 × 10−11 | 3.02 × 10−11 | 1.091 × 10−5 | 8.89 × 10−10 | 3.02 × 10−11 | 1.21 × 10−12 |
| F19 | 1.891 × 10−6 | 1.64 × 10−12 | 1.72 × 10−12 | 1.72 × 10−12 | 1.72 × 10−12 | 2.41 × 10−12 | 2.70 × 10−14 | 1.01 × 10−11 | 8.68 × 10−11 | 1.72 × 10−12 |
| F20 | 1.701 × 10−8 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.21 × 10−12 | 1.701 × 10−8 | 1.21 × 10−12 | NaN | 3.337 × 10−1 | 1.21 × 10−12 |
| Algorithms | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| JSOA | COOT | CGO | MAO | GEO | AOA | GBO | HGSO | HHO | HGS | ArOA | |
| F1 | 8.36 × 10−67 | 2.62 × 10−12 | 1.87 × 10−5 | 2.77 × 104 | 7.05 × 10−1 | 1.87 × 10−33 | 1.13 × 10−42 | 1.27 × 10−61 | 6.49 × 10−43 | 8.17 × 10−54 | 5.1800 |
| F2 | 0.0000 | 3.20 × 10−8 | 5.54 × 10−2 | 3.04 × 102 | 1.1100 | 4.17 × 10−3 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 4.90 × 10−1 |
| F3 | 5.54 × 10−39 | 4.13 × 10−4 | 2.80 × 10−1 | 7.80 × 102 | 2.83 × 10 | 8.53 × 10−17 | 3.35 × 10−17 | 1.53 × 10−33 | 3.01 × 10−20 | 1.93 × 10−23 | 7.30 × 10−12 |
| F4 | 5.35 × 10−40 | 3.31 × 10−5 | 1.91 × 10−2 | 7.52 × 10 | 5.5700 | 2.81 × 10−16 | 2.73 × 10−17 | 2.30 × 10−28 | 1.12 × 10−20 | 2.47 × 10−13 | 3.28 × 10−2 |
| F5 | 7.90 × 10−40 | 5.55 × 10−1 | 3.79 × 10−1 | 3.59 × 1038 | 1.06 × 107 | 4.53 × 10−17 | 2.07 × 10−18 | 5.22 × 10−35 | 3.76 × 10−19 | 6.74 × 10−20 | 1.43 × 10−10 |
| F6 | 5.87 × 10−296 | 1.05 × 10−45 | 4.2 × 10−23 | 6.68 × 108 | 2.50 × 10−3 | 1.88 × 10−147 | 4.1 × 10−174 | 0.0000 | 4.96 × 10−212 | 7.22 × 10−88 | 0.0000 |
| F7 | 3.61 × 10−66 | 9.72 × 10−9 | 4.02 × 10−5 | 9.40 × 10 | 3.63 × 10−2 | 3.96 × 10−34 | 2.01 × 10−41 | 1.46 × 10−61 | 3.26 × 10−41 | 7.46 × 10−25 | 0.0000 |
| F8 | 1.20 × 10−66 | 2.90 × 10−8 | 4.40 × 10−3 | 4.94 × 103 | 7.4800 | 3.38 × 10−34 | 2.45 × 10−37 | 1.43 × 10−56 | 5.81 × 10−42 | 3.45 × 10−27 | 3.40 × 10−205 |
| F9 | 0.0000 | 7.36 × 10−1 | 6.00 × 10−5 | 2.0000 | 2.0000 | 1.0000 | 0.0000 | 1.0000 | 0.0000 | 3.99 × 10−1 | 2.66 × 10−1 |
| F10 | 4.93 × 10−62 | 8.1200 | 9.55 × 10−1 | 6.59 × 107 | 5.42 × 10 | 1.84 × 10−7 | 4.75 × 10−25 | 8.63 × 10−21 | 1.09 × 10−10 | 5.50 × 10 | 3.89 × 102 |
| F11 | 8.88 × 10−16 | 1.82 × 10−4 | 2.28 × 10−2 | 1.91 × 10 | 2.4800 | 1.93 × 10 | 8.88 × 10−16 | 4.14 × 10−16 | 8.88 × 10−16 | 2.90 × 10−15 | 7.70 × 10−16 |
| F12 | 1.63 × 10−6 | 3.02 × 10−4 | 1.70 × 10−1 | 5.0000 | 2.94 × 102 | 3.78 × 10−2 | 1.63 × 10−6 | 7.54 × 10−2 | 1.63 × 10−6 | 2.94 × 10−2 | 1.63 × 10−6 |
| F13 | 0.0000 | 6.12 × 10−1 | 2.40 × 10−4 | 8.6700 | 3.9400 | 6.7100 | 1.07 × 10−2 | 7.5700 | 0.0000 | 0.0000 | 0.0000 |
| F14 | 4.46 × 10−4 | 1.53 × 10−2 | 5.56 × 10−3 | 3.93 × 10 | 4.94 × 10−2 | 2.44 × 10−3 | 3.02 × 10−3 | 8.49 × 10−4 | 4.82 × 10−4 | 5.78 × 10−3 | 1.42 × 10−4 |
| F15 | 0.0000 | 1.74 × 10−4 | 4.84 × 10−3 | 3.45 × 102 | 7.61 × 10 | 5.6900 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| F16 | 3.32 × 10−1 | 3.17 × 10 | 2.49 × 10−3 | 7.18 × 104 | 3.99 × 10 | 2.89 × 10 | 2.68 × 10 | 2.86 × 10 | 4.64 × 10−2 | 1.82 × 10 | 2.88 × 10 |
| F17 | 3.40 × 10−38 | 7.56 × 10−2 | 8.54 × 10−2 | 1.83 × 10 | 1.6000 | 1.10 × 10−1 | 6.76 × 10−3 | 1.01 × 10−1 | 1.68 × 10−20 | 1.43 × 10−2 | 9.99 × 10−2 |
| F18 | 3.16 × 10−28 | 7.43 × 10−5 | 2.63 × 10−4 | 5.60 × 1011 | 1.07 × 10−2 | 9.89 × 10−5 | 5.48 × 10−11 | 3.38 × 10−28 | 1.45 × 10−10 | 2.61 × 10−3 | 0.0000 |
| F19 | 1.17 × 10−13 | 7.39 × 10−12 | 3.5 × 10−12 | 5.31 × 10−4 | 4.78 × 10−10 | 2.90 × 10−11 | 4.34 × 10−12 | 3.38 × 10−11 | 3.57 × 10−12 | 1.38 × 10−11 | 7.86 × 10−5 |
| F20 | 0.0000 | 5.09 × 10−1 | 4.49 × 10−2 | 1.0000 | 1.0000 | 1.0000 | 2.00 × 10−4 | 1.0000 | 0.0000 | 7.02 × 10−1 | 1.0000 |
| Algorithms | MAE | Rank |
|---|---|---|
| HHO | 2.35 × 10−3 | 1 |
| JSOA | 1.66 × 10−2 | 2 |
| CGO | 1.01 × 10−1 | 3 |
| GBO | 1.3400 | 4 |
| HGSO | 1.9200 | 5 |
| COOT | 2.1200 | 6 |
| AOA | 3.1400 | 7 |
| HGS | 3.7200 | 8 |
| ArOA | 2.12 × 10 | 9 |
| GEO | 5.31 × 105 | 10 |
| MAO | 1.80 × 1037 | 11 |
| Algorithm | Optimal Values for Variables | |||
|---|---|---|---|---|
| JSOA | 0.94194 | −2.10000 | 1 | 1.076554818 |
| MAO | 0.22351 | −1.0331 | 0 | 1.1822336005 (infeasible *) |
| CGO | 0.20000 | −1.0000 | 0 | 1.2500000000 |
| COOT | 0.20000 | −1.0000 | 0 | 1.2500000000 |
| GEO | 0.36341 | −1.5510 | 1 | 0.1932841405 (infeasible *) |
| HHO | 0.20000 | −1.0000 | 0 | 1.2500000000 |
| Algorithm | Optimal Values for Variables | |||||||
|---|---|---|---|---|---|---|---|---|
| JSOA | 0.19468 | 1.2806 | 1.9559 | 1 | 0 | 0 | 1 | 2.92495120667677 |
| MAO | 7.41298 | 2.08955 | 13.6171 | 0 | 1 | 1 | 1 | 5.69266 × 1017 (infeasible *) |
| CGO | 11.6400 | 32.7787 | 47.0926 | 1 | 1 | 0 | 1 | 3.9149 × 1022 (infeasible *) |
| COOT | 0.14214 | 0.78882 | 1.9077 | 1 | 1 | 0 | 1 | 3.00121860556942 |
| GEO | 96.5572 | 47.3277 | 86.2538 | 1 | 0 | 1 | 0 | 3.6795 × 1043 (infeasible *) |
| HHO | 0.38922 | 1.1288 | 2.018 | 0 | 0 | 0 | 0 | 4.7224 (infeasible *) |
| Algorithm | Optimal Values for Variables | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| JSOA | 0.001 | 0.0010003 | 0.001 | 0.001 | 0.001 | 0.001 | 1.58 | 1.5241 | 4.9599 | 2.1421 | 0.001 | 0.001 | 0.007508 | 0.089784 | 0.034988 |
| MAO | 3.446 | 4.0369 | 4.0025 | 1.5223 | 0.29135 | 0.40969 | 1.4476 | 4.61 | 3.4963 | 4.7813 | 1.2534 | 4.5339 | 4.007 | 3.1936 | 8.07 × 106 (infeasible *) |
| * CGO | 5 | 2.8898 | 5 | 2.3383 | 3.3192 | 5 | 3.2098 | 5 | 3.2024 | 5 | 5 | 3.8764 | 5 | 3.4982 | 6.19 × 107 (infeasible *) |
| COOT | 0.001 | 0.001 | 0.001 | 0.001 | 4.7635 | 4.839 | 2.0353 | 1.6635 | 3.3789 | 4.8519 | 2.0843 | 0.58734 | 0.11329 | 1.1238 | 12.659065 |
| GEO | 3.0574 | 1.9180 | 2.2207 | 3.3653 | 1.9315 | 1.8528 | 2.1755 | 3.7480 | 1.8249 | 2.3242 | 0.0010 | 2.0866 | 3.1755 | 2.1960 | 5.94 × 106 (infeasible *) |
| HHO | 0.001 | 0.001 | 0.001 | 0.21205 | 1.8724 | 2.6267 | 2.795 | 2.7998 | 3.0903 | 4.9901 | 4.9908 | 4.9937 | 1.9368 | 2.7519 | 7.55 × 10 (infeasible *) |
| Algorithm | Optimal Values for Variables | ||||
|---|---|---|---|---|---|
| JSOA | 0.198832312221973 | 3.337365260666560 | 9.192024209255530 | 0.198832312331652 | 1.67021774898897 |
| MAO | 1.0365 | 2.0756 | 6.1919 | 1.1649 | 8.04184550085786 |
| CGO | 0.5131 | 6.8515 | 2.5371 | 0.22107 | 2.5553 (infeasible *) |
| COOT | 0.19808 | 3.384 | 9.1731 | 0.19977 | 1.67928562217482 |
| GEO | 0.93008 | 3.6876 | 5.6868 | 0.93798 | 8.06300000000000 |
| HHO | 0.34167 | 2.307 | 7.0138 | 0.34153 | 2.17679623002226 (infeasible *) |
| Algorithm | Parameter | ||
|---|---|---|---|
| Kp | Ki | Kd | |
| JSOA | 3.6729 | 0.0058 | 4.9697 |
| MAO | 3.9916 | 0.59242 | 4.4857 |
| CGO | 2.5303 | 0.35241 | 5 |
| COOT | 3.8496 | 0.57292 | 5 |
| GEO | 3.6799 | 0.30945 | 2.2922 |
| HHO | 3.6504 | 0.01 | 4.9338 |
| Algorithm | Transient Parameters | |||
|---|---|---|---|---|
| Rise Time (s) | Settling Time (s) | Peak Time (s) | Peak Overshoot (%) | |
| JSOA | 2.0059 | 3.2915 | 4.027 | 0 |
| MOA | 1.7484 | 15.3316 | 4.9209 | 22.1115 |
| CGO | 2.4723 | 23.9662 | 7.2793 | 52.2769 |
| COOT | 1.7455 | 16.1494 | 5.659 | 17.9202 |
| GEO | 2.0863 | 22.9262 | 5.3124 | 27.432 |
| HHO | 2.0205 | 3.3181 | 4.0793 | 0 |
| Algorithm | Angles | THD% | |||||
|---|---|---|---|---|---|---|---|
| JSOA | 7.86 | 19.36 | 29.65 | 47.68 | 63.20 | 5.01 | 3.49 × 10−31 |
| BWOA | 7.86 | 19.37 | 29.65 | 47.68 | 63.21 | 5.01 | 1.29 × 10−28 |
| WOA | 4.19 | 20.29 | 22.12 | 41.97 | 61.15 | 6.9 | 3.93 × 10−2 |
| MGWOA | 0.49 | 14.74 | 25.61 | 40.57 | 89.16 | 5.71 | 16.04 × 10−2 |
| MAO | 9.67 | 22.37 | 33.04 | 51.91 | 64.63 | 5.26 | 3.64 × 10−1 |
| CGO | 13.25 | 26.37 | 45.93 | 46.05 | 87.22 | 13.99 | 9.76 × 10−2 |
| COOT | 7.97 | 19.46 | 29.79 | 47.74 | 63.20 | 5.04 | 3.43 × 10−4 |
| GEO | 8.62 | 10.60 | 38.76 | 76.59 | 83.17 | 14.83 | 4.64 × 10−1 |
| HHO | 8.16 | 19.50 | 30.15 | 48.21 | 63.35 | 5.16 | 2.69 × 10−4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peraza-Vázquez, H.; Peña-Delgado, A.; Ranjan, P.; Barde, C.; Choubey, A.; Morales-Cepeda, A.B. A Bio-Inspired Method for Mathematical Optimization Inspired by Arachnida Salticidade. Mathematics 2022, 10, 102. https://doi.org/10.3390/math10010102
Peraza-Vázquez H, Peña-Delgado A, Ranjan P, Barde C, Choubey A, Morales-Cepeda AB. A Bio-Inspired Method for Mathematical Optimization Inspired by Arachnida Salticidade. Mathematics. 2022; 10(1):102. https://doi.org/10.3390/math10010102
Chicago/Turabian StylePeraza-Vázquez, Hernán, Adrián Peña-Delgado, Prakash Ranjan, Chetan Barde, Arvind Choubey, and Ana Beatriz Morales-Cepeda. 2022. "A Bio-Inspired Method for Mathematical Optimization Inspired by Arachnida Salticidade" Mathematics 10, no. 1: 102. https://doi.org/10.3390/math10010102
APA StylePeraza-Vázquez, H., Peña-Delgado, A., Ranjan, P., Barde, C., Choubey, A., & Morales-Cepeda, A. B. (2022). A Bio-Inspired Method for Mathematical Optimization Inspired by Arachnida Salticidade. Mathematics, 10(1), 102. https://doi.org/10.3390/math10010102