
Multi-UAV Coverage Path Planning Based on Hexagonal Grid Decomposition in Maritime Search and Rescue


Abstract
:1. Introduction
2. Problem Description
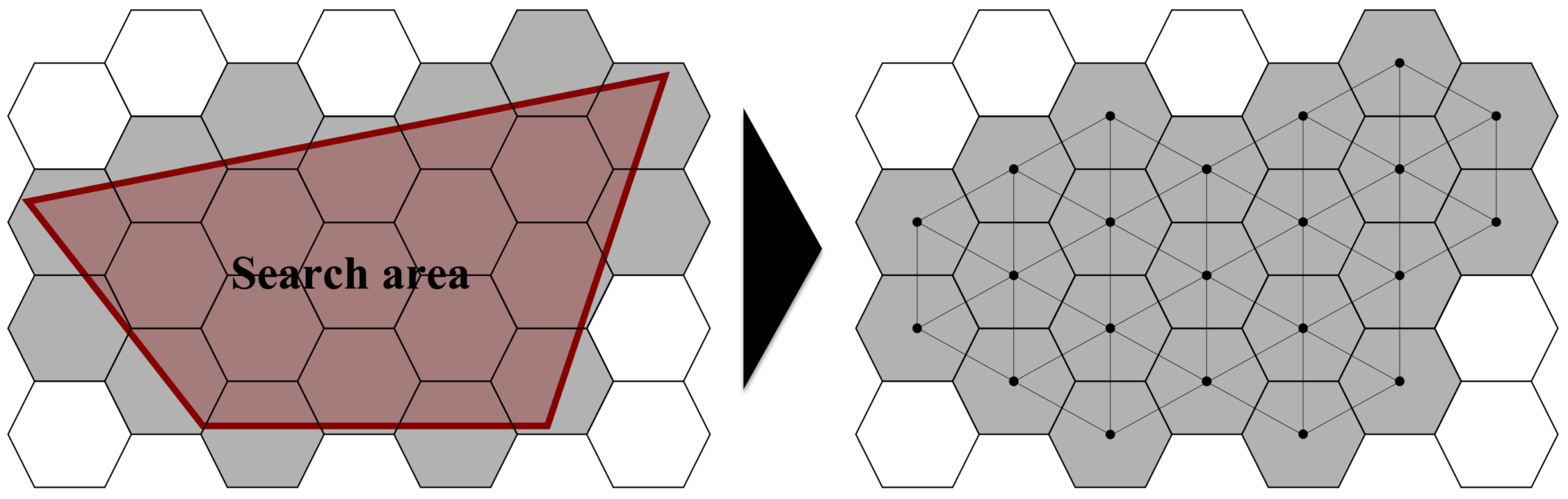
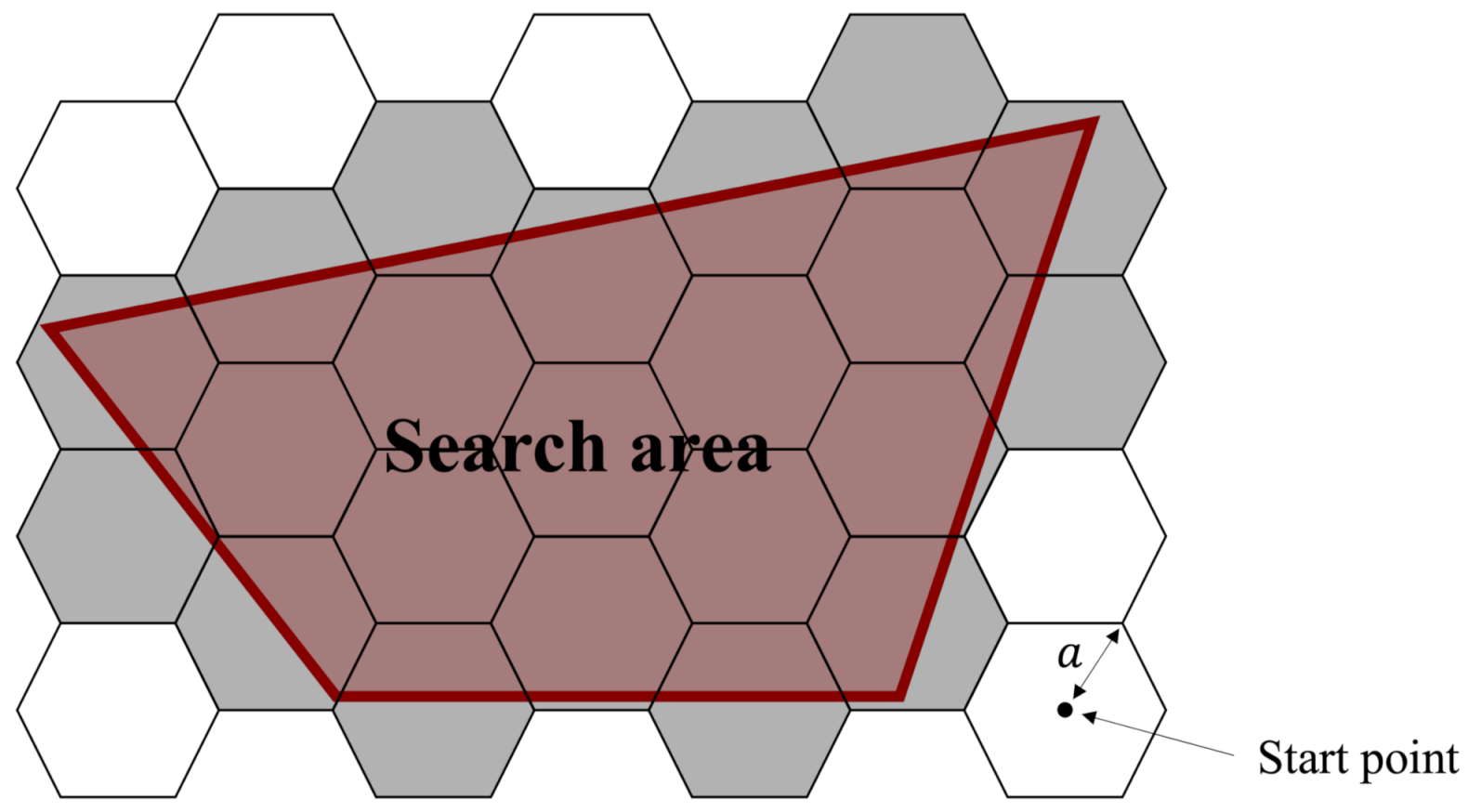
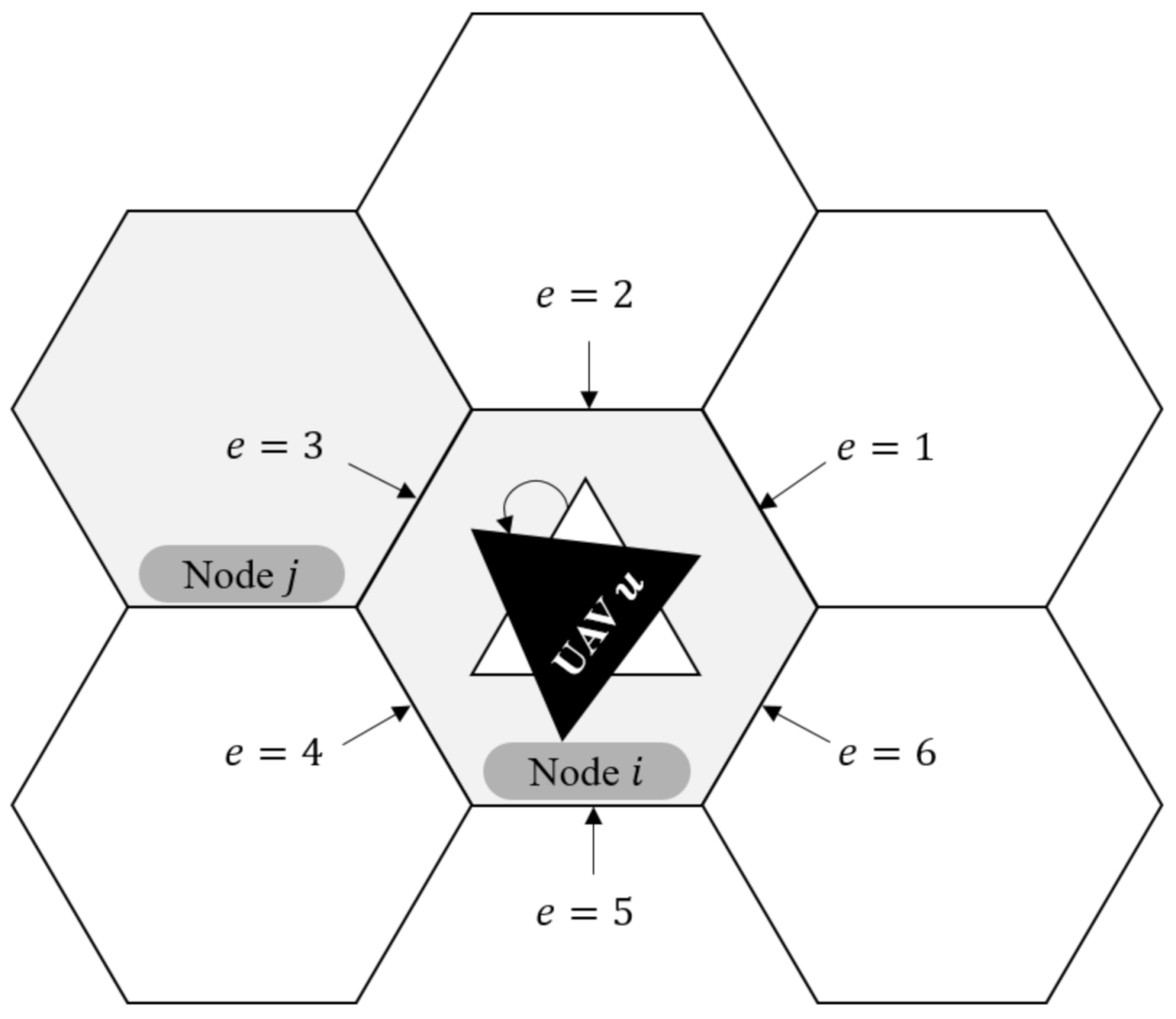
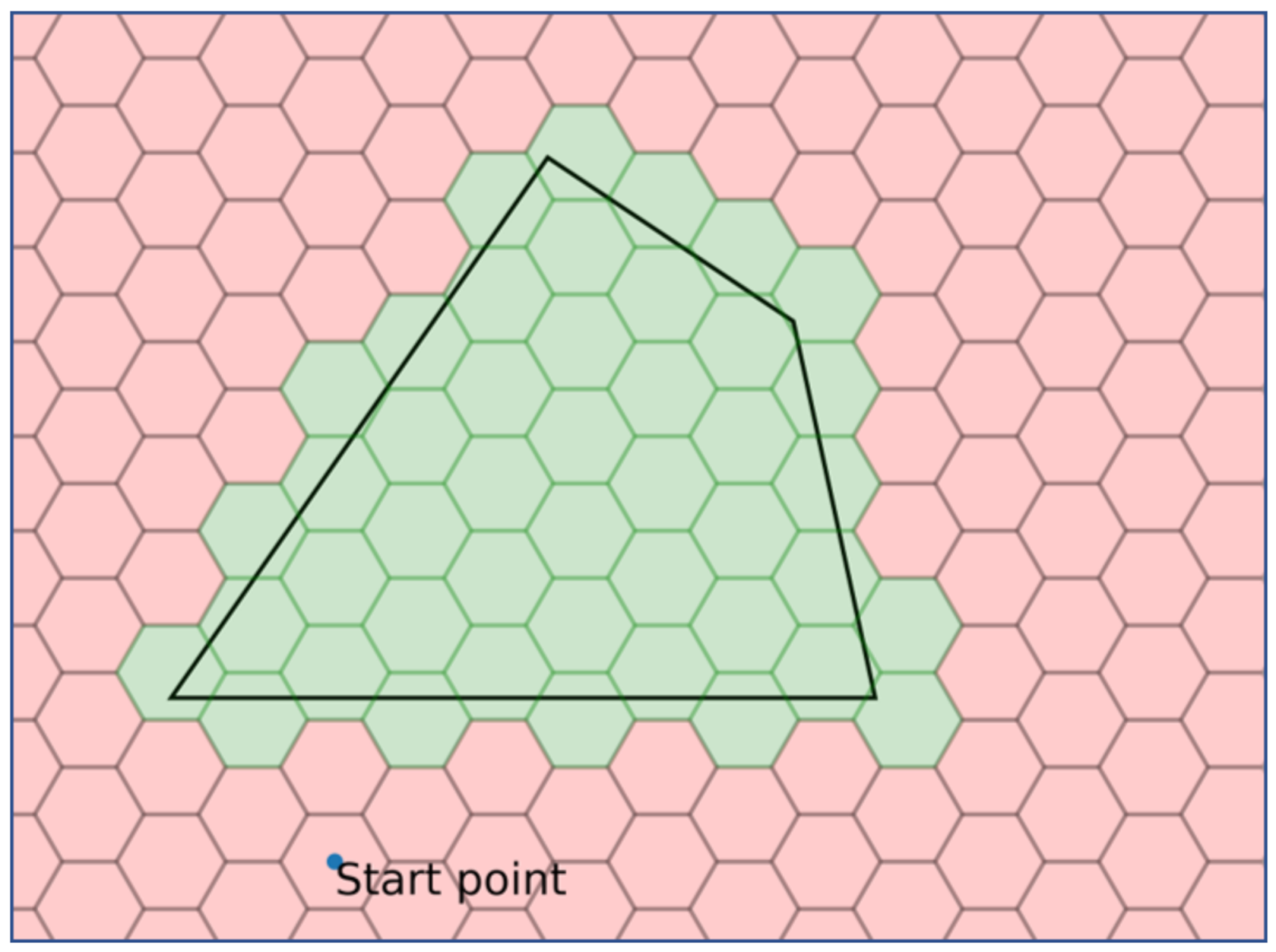
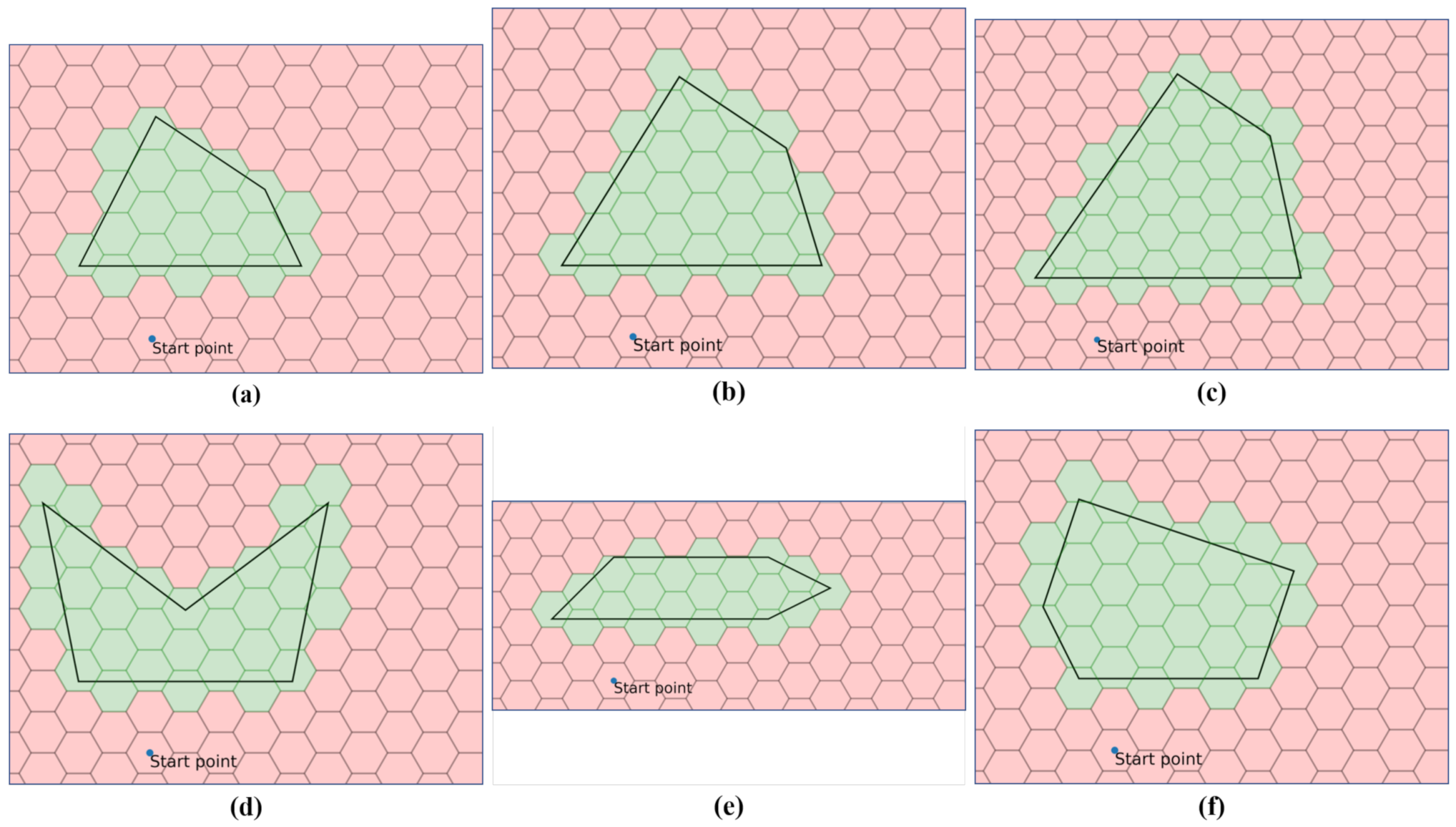
2.1. Phase 1: Hexagonal Grid-Based Decomposition
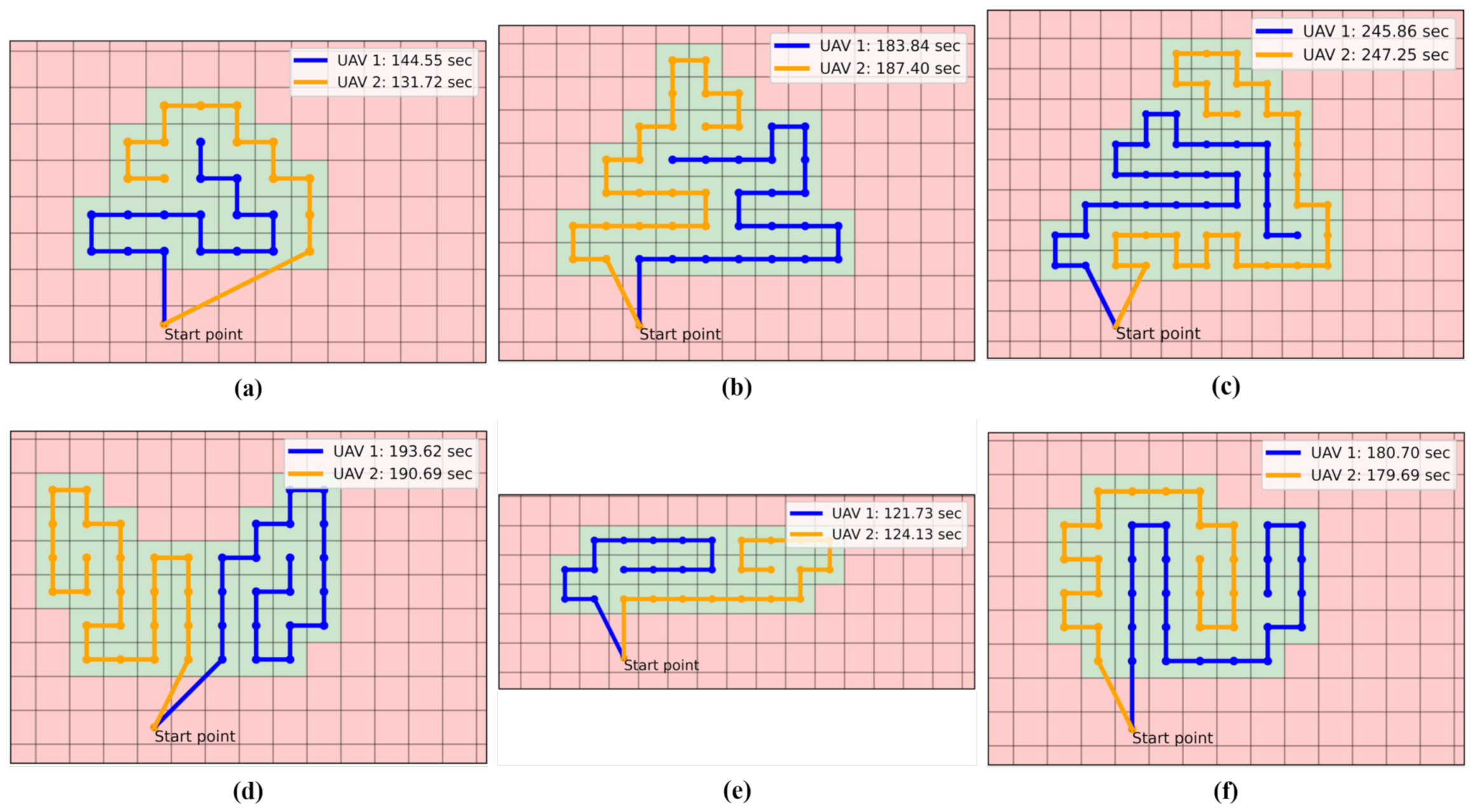
2.2. Phase 2: Multi-UAV Coverage Path Planning
Mixed-Integer Linear Programming Model
3. Numerical Experiments
3.1. Experiment Design
3.2. Time Needed to Calculate the Optimal Solution in Response to Changes in the Size of the Search Area
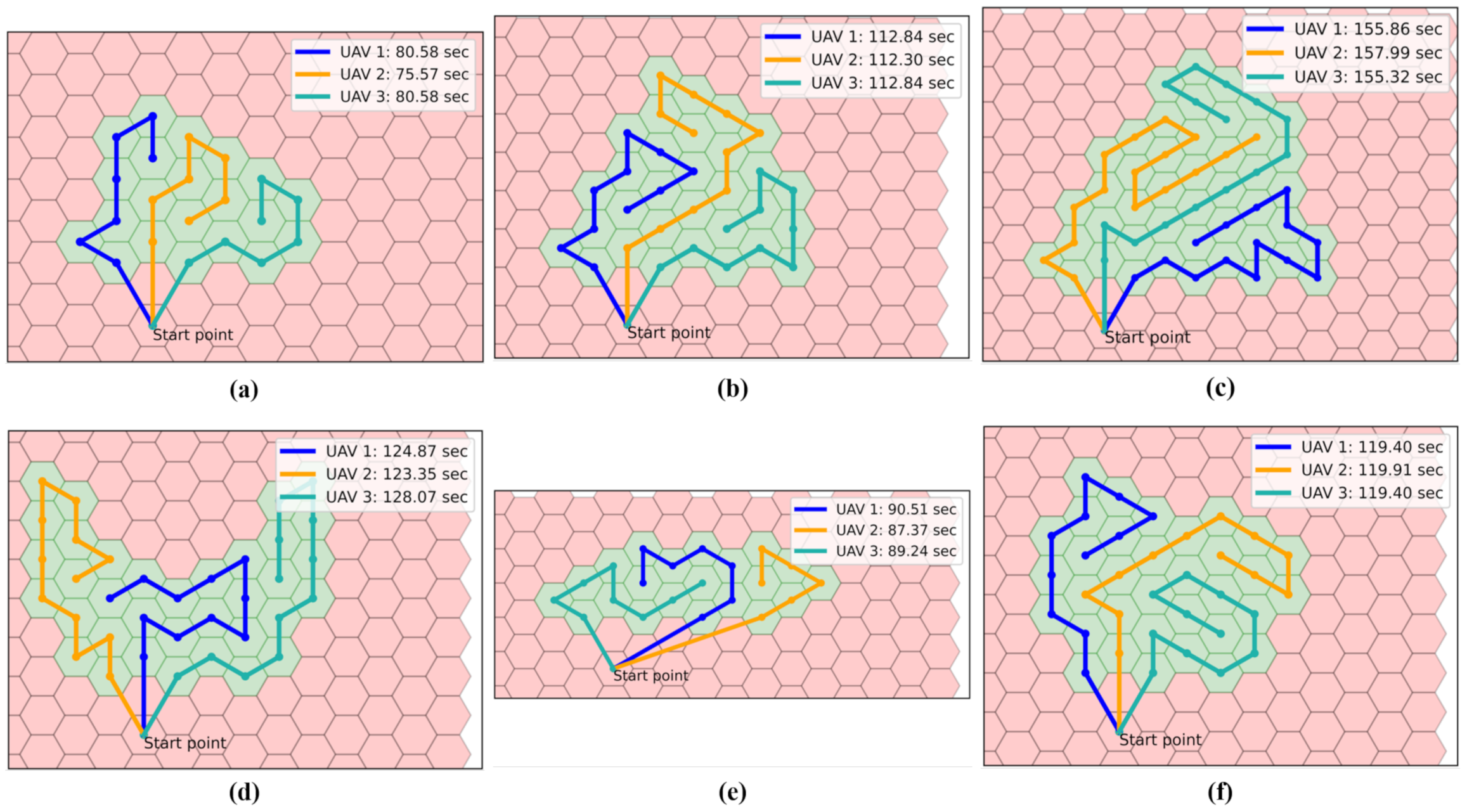
3.3. Search Path According to Changes in Search Area Shape
3.4. Search Path According to the Change in the Shape of Grid Cells
3.5. Search Path According to the Change in the Number of Served UAVs
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Set and parameters | |
| i | Index of node |
| u | Index of UAV |
| e | Index of the side that makes up the node’s hexagon or index of starting nodes and dummy node |
| s | Index of UAV movement steps |
| Index of UAV u’s starting node | |
| Index of ending node (dummy node to indicate the end of the search) | |
| Set of nodes i in the search area | |
| Set of nodes i and ending node in the search area, | |
| Set of nodes adjacent to node i | |
| U | Set of UAV u |
| E | Set of indices with the following values: 1 () if a UAV is heading toward to the hexagonal side () of the node; 7 if it passed the starting node; 8 if it passed the ending node |
| S | Set of UAV movement steps, including sufficiently large number |
| Distance between node i and node j (unit: m) | |
| Hexagonal side e of node i that intersects the vector of nodes | |
| Vector that is perpendicular to the hexagonal side e with direction from the current node to heading side e | |
| Angle between vector and vector (unit: radian) | |
| Average cruising speed of UAV u in straight line (unit: m/sec) | |
| Average rotational speed of UAV u (unit: radian/sec) | |
| Maximum duration time for UAV u (unit: sec) | |
| Decision variables | |
| 1 if UAV u is at node i facing side e at step s and its subsequent path is equal to , 0 otherwise | |
| 1 if UAV u moves from the starting node to node i, 0 otherwise | |
| Travel time for UAV u from its starting node to the initially reached node in the search area | |
| Total travel time for UAV u to complete the search | |
| Resulting time to complete the search, | |
References
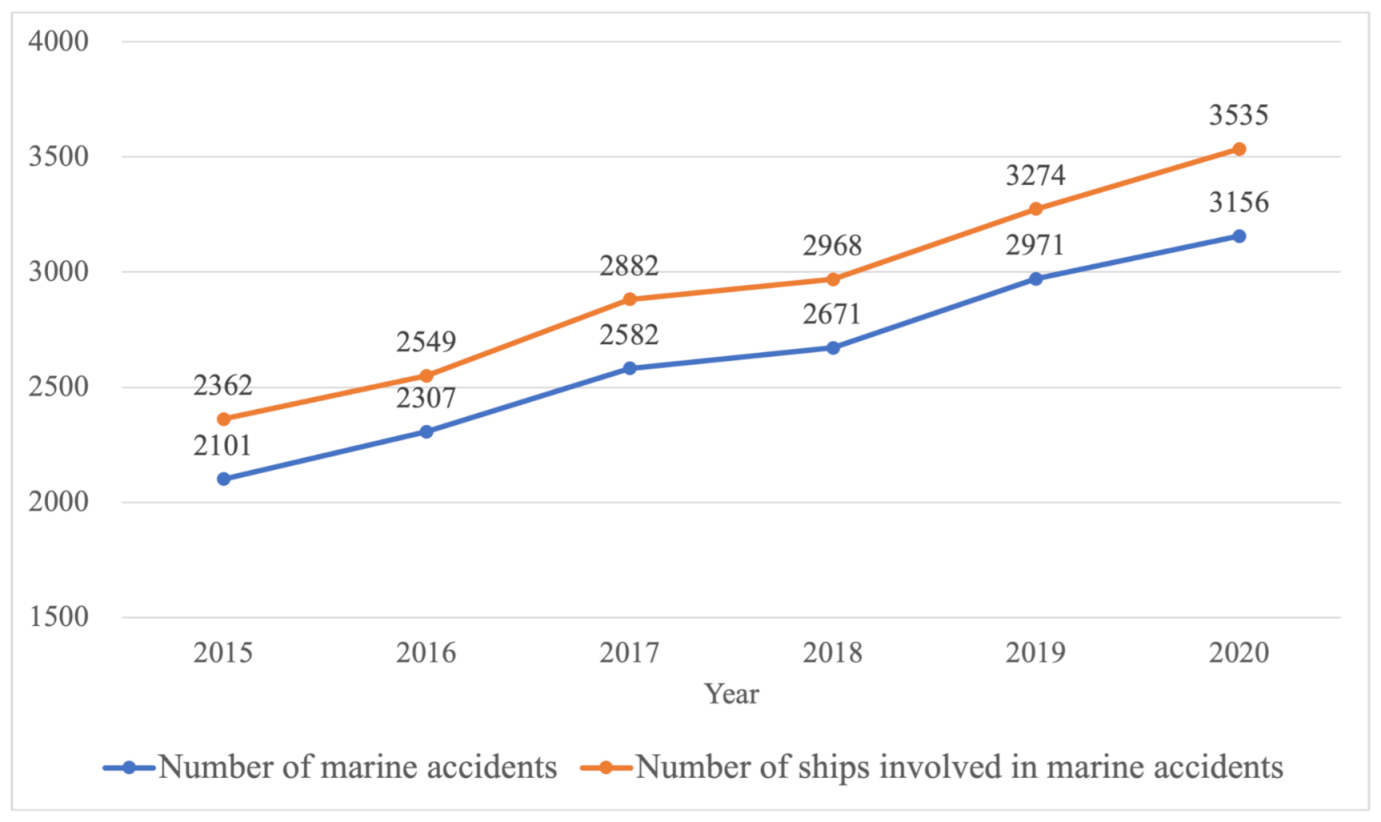
- Korea Maritime Safety Tribunal (KMST). Statistics for Marine Accidents. Available online: https://www.kmst.go.kr/eng/com/selectHtmlPage.do?htmlName=m4_vesseltype (accessed on 20 August 2021).
- Soares, C.G.; Teixeira, A. Risk assessment in maritime transportation. Reliab. Eng. Syst. Saf. 2001, 74, 299–309. [Google Scholar] [CrossRef]
- Crain, C.M.; Halpern, B.S.; Beck, M.W.; Kappel, C.V. Understanding and managing human threats to the coastal marine environment. Ann. N. Y. Acad. Sci. 2009, 1162, 39–62. [Google Scholar] [CrossRef] [PubMed]
- Abi-Zeid, I.; Frost, J.R. SARPlan: A decision support system for Canadian Search and Rescue Operations. Eur. J. Oper. Res. 2005, 162, 630–653. [Google Scholar] [CrossRef]
- Azofra, M.; Pérez-Labajos, C.; Blanco, B.; Achutegui, J. Optimum placement of sea rescue resources. Saf. Sci. 2007, 45, 941–951. [Google Scholar] [CrossRef]
- Breivik, Ø.; Allen, A.A.; Maisondieu, C.; Olagnon, M. Advances in search and rescue at sea. Ocean. Dyn. 2013, 63, 83–88. [Google Scholar] [CrossRef] [Green Version]
- Yuh, J.; Marani, G.; Blidberg, D.R. Applications of marine robotic vehicles. Intell. Serv. Robot. 2011, 4, 221–231. [Google Scholar] [CrossRef]
- Karatas, M.; Razi, N.; Gunal, M.M. An ILP and simulation model to optimize search and rescue helicopter operations. J. Oper. Res. Soc. 2017, 68, 1335–1351. [Google Scholar] [CrossRef] [Green Version]
- Kruijff, G.J.M.; Kruijff-Korbayová, I.; Keshavdas, S.; Larochelle, B.; Janíček, M.; Colas, F.; Liu, M.; Pomerleau, F.; Siegwart, R.; Neerincx, M.A.; et al. Designing, developing, and deploying systems to support human–robot teams in disaster response. Adv. Robot. 2014, 28, 1547–1570. [Google Scholar] [CrossRef] [Green Version]
- Cubber, G.; Doroftei, D.; Rudin, K.; Berns, K.; Serrano, D.; Sanchez, J.; Govindaraj, S.; Bedkowski, J.; Roda, R. Search and rescue robotics-from theory to practice. In Search Rescue Robotics From Theory to Practice; IntechOpen: London, UK, 2017. [Google Scholar]
- Wei, G.; Gardner, J.W.; Cole, M.; Xing, Y. Multi-sensor module for a mobile robot operating in harsh environments. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–3 November 2016; pp. 1–3. [Google Scholar]
- Klamt, T.; Rodriguez, D.; Baccelliere, L.; Chen, X.; Chiaradia, D.; Cichon, T.; Gabardi, M.; Guria, P.; Holmquist, K.; Kamedula, M.; et al. Flexible disaster response of tomorrow: Final presentation and evaluation of the CENTAURO system. IEEE Robot. Autom. Mag. 2019, 26, 59–72. [Google Scholar] [CrossRef] [Green Version]
- Queralta, J.P.; Raitoharju, J.; Gia, T.N.; Passalis, N.; Westerlund, T. Autosos: Towards multi-uav systems supporting maritime search and rescue with lightweight ai and edge computing. arXiv 2020, arXiv:2005.03409. [Google Scholar]
- Matos, A.; Silva, E.; Almeida, J.; Martins, A.; Ferreira, H.; Ferreira, B.; Alves, J.; Dias, A.; Fioravanti, S.; Bertin, D.; et al. Unmanned maritime systems for search and rescue. Search Rescue Robot. 2017, 77–92. [Google Scholar] [CrossRef] [Green Version]
- Marin-Plaza, P.; Hussein, A.; Martin, D.; Escalera, A.d.l. Global and local path planning study in a ROS-based research platform for autonomous vehicles. J. Adv. Transp. 2018, 2018, 38–47. [Google Scholar] [CrossRef]
- Moysiadis, V.; Tsolakis, N.; Katikaridis, D.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Mobile Robotics in Agricultural Operations: A Narrative Review on Planning Aspects. Appl. Sci. 2020, 10, 3453. [Google Scholar] [CrossRef]
- Qin, Y.Q.; Sun, D.B.; Li, N.; Cen, Y.G. Path planning for mobile robot using the particle swarm optimization with mutation operator. In Proceedings of the 2004 international conference on machine learning and cybernetics (IEEE Cat. No. 04EX826), Shanghai, China, 26–29 August 2004; Volume 4, pp. 2473–2478. [Google Scholar]
- Zhong, X.; Tian, J.; Hu, H.; Peng, X. Hybrid path planning based on safe A* algorithm and adaptive window approach for mobile robot in large-scale dynamic environment. J. Intell. Robot. Syst. 2020, 99, 65–77. [Google Scholar] [CrossRef]
- Yasuaki, A.; Yoshiki, M. Real-time cooperative collision avoidance method of multiple mobile robots. IFAC Proc. Vol. 2004, 37, 30–35. [Google Scholar] [CrossRef]
- Pozna, C.; Troester, F.; Precup, R.E.; Tar, J.K.; Preitl, S. On the design of an obstacle avoiding trajectory: Method and simulation. Math. Comput. Simul. 2009, 79, 2211–2226. [Google Scholar] [CrossRef]
- Buniyamin, N.; Ngah, W.W.; Sariff, N.; Mohamad, Z. A simple local path planning algorithm for autonomous mobile robots. Int. J. Syst. Appl. Eng. Dev. 2011, 5, 151–159. [Google Scholar]
- Low, E.S.; Ong, P.; Cheah, K.C. Solving the optimal path planning of a mobile robot using improved Q-learning. Robot. Auton. Syst. 2019, 115, 143–161. [Google Scholar] [CrossRef]
- Choset, H. Coverage for robotics–a survey of recent results. Ann. Math. Artif. Intell. 2001, 31, 113–126. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef] [Green Version]
- Cabreira, T.M.; Brisolara, L.B.; Ferreira Jr, P.R. Survey on coverage path planning with unmanned aerial vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef] [Green Version]
- Choset, H. Coverage of known spaces: The boustrophedon cellular decomposition. Auton. Robot. 2000, 9, 247–253. [Google Scholar] [CrossRef]
- Jiao, Y.S.; Wang, X.M.; Chen, H.; Li, Y. Research on the coverage path planning of uavs for polygon areas. In Proceedings of the 2010 5th IEEE Conference on Industrial Electronics and Applications, Taichung, Taiwan, 15–17 June 2010; pp. 1467–1472. [Google Scholar]
- Avellar, G.S.; Pereira, G.A.; Pimenta, L.C.; Iscold, P. Multi-UAV routing for area coverage and remote sensing with minimum time. Sensors 2015, 15, 27783–27803. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kyriakakis, N.A.; Marinaki, M.; Matsatsinis, N.; Marinakis, Y. A cumulative unmanned aerial vehicle routing problem approach for humanitarian coverage path planning. Eur. J. Oper. Res. 2021, in press. [Google Scholar] [CrossRef]
- Choset, H.; Pignon, P. Coverage path planning: The boustrophedon cellular decomposition. In Field and Service Robotics; Springer: London, UK, 1998; pp. 203–209. [Google Scholar]
- Choset, H.; Acar, E.; Rizzi, A.A.; Luntz, J. Exact cellular decompositions in terms of critical points of morse functions. In Proceedings of the 2000 ICRA, Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 3, pp. 2270–2277. [Google Scholar]
- Acar, E.U.; Choset, H.; Rizzi, A.A.; Atkar, P.N.; Hull, D. Morse decompositions for coverage tasks. Int. J. Robot. Res. 2002, 21, 331–344. [Google Scholar] [CrossRef]
- Rekleitis, I.; Lee-Shue, V.; New, A.P.; Choset, H. Limited communication, multi-robot team based coverage. In Proceedings of the IEEE International Conference on Robotics and Automation, ICRA’04, New Orleans, LA, USA, 26 April–1 May 2004; Volume 4, pp. 3462–3468. [Google Scholar]
- Li, Y.; Chen, H.; Er, M.J.; Wang, X. Coverage path planning for UAVs based on enhanced exact cellular decomposition method. Mechatronics 2011, 21, 876–885. [Google Scholar] [CrossRef]
- Balampanis, F.; Maza, I.; Ollero, A. Area partition for coastal regions with multiple UAS. J. Intell. Robot. Syst. 2017, 88, 751–766. [Google Scholar] [CrossRef]
- Coombes, M.; Chen, W.H.; Liu, C. Boustrophedon coverage path planning for UAV aerial surveys in wind. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1563–1571. [Google Scholar]
- Huang, W.H. Optimal line-sweep-based decompositions for coverage algorithms. In Proceedings of the 2001 ICRA, IEEE International Conference on Robotics and Automation (Cat. No. 01CH37164), Seoul, Korea, 21–26 May 2001; Volume 1, pp. 27–32. [Google Scholar]
- Maza, I.; Ollero, A. Multiple UAV cooperative searching operation using polygon area decomposition and efficient coverage algorithms. In Distributed Autonomous Robotic Systems 6; Springer: Tokyo, Japan, 2007; pp. 221–230. [Google Scholar]
- Bochkarev, S.; Smith, S.L. On minimizing turns in robot coverage path planning. In Proceedings of the 2016 IEEE International Conference on Automation Science and Engineering (CASE), Fort Worth, TX, USA, 21–25 August 2016; pp. 1237–1242. [Google Scholar]
- Torres, M.; Pelta, D.A.; Verdegay, J.L.; Torres, J.C. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction. Expert Syst. Appl. 2016, 55, 441–451. [Google Scholar] [CrossRef]
- Toth, P.; Vigo, D. The vehicle routing problem: Society for Industrial and Applied Mathematics. Siam Monogr. Discret. Math. Appl. 2001. [Google Scholar] [CrossRef]
- Barrientos, A.; Colorado, J.; Cerro, J.d.; Martinez, A.; Rossi, C.; Sanz, D.; Valente, J. Aerial remote sensing in agriculture: A practical approach to area coverage and path planning for fleets of mini aerial robots. J. Field Robot. 2011, 28, 667–689. [Google Scholar] [CrossRef] [Green Version]
- Cabreira, T.M.; Ferreira, P.R.; Di Franco, C.; Buttazzo, G.C. Grid-based coverage path planning with minimum energy over irregular-shaped areas with UAVs. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 758–767. [Google Scholar]
- Cho, S.W.; Park, H.J.; Lee, H.; Shim, D.H.; Kim, S.Y. Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations. Comput. Ind. Eng. 2021, 161, 107612. [Google Scholar] [CrossRef]
- Miao, X.; Lee, J.; Kang, B.Y. Scalable coverage path planning for cleaning robots using rectangular map decomposition on large environments. IEEE Access 2018, 6, 38200–38215. [Google Scholar] [CrossRef]
- Lakshmanan, A.K.; Mohan, R.E.; Ramalingam, B.; Le, A.V.; Veerajagadeshwar, P.; Tiwari, K.; Ilyas, M. Complete coverage path planning using reinforcement learning for tetromino based cleaning and maintenance robot. Autom. Constr. 2020, 112, 103078. [Google Scholar] [CrossRef]
- Cheng, K.P.; Mohan, R.E.; Nhan, N.H.K.; Le, A.V. Graph theory-based approach to accomplish complete coverage path planning tasks for reconfigurable robots. IEEE Access 2019, 7, 94642–94657. [Google Scholar] [CrossRef]
- Valente, J.; Sanz, D.; Del Cerro, J.; Barrientos, A.; de Frutos, M.Á. Near-optimal coverage trajectories for image mosaicing using a mini quad-rotor over irregular-shaped fields. Precis. Agric. 2013, 14, 115–132. [Google Scholar] [CrossRef]
- Nam, L.; Huang, L.; Li, X.J.; Xu, J. An approach for coverage path planning for UAVs. In Proceedings of the 2016 IEEE 14th International Workshop on Advanced Motion Control (AMC), Auckland, New Zealand, 22–24 April 2016; pp. 411–416. [Google Scholar]
- Choi, Y.; Choi, Y.; Briceno, S.; Mavris, D.N. Energy-constrained multi-UAV coverage path planning for an aerial imagery mission using column generation. J. Intell. Robot. Syst. 2020, 97, 125–139. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV | (m/s) | (radian/s) | (s) |
|---|---|---|---|
| UAV 1 (Quad-rotor) | 4 | 0.5 | 1800 |
| UAV 2 (Quad-rotor) | 4 | 1 | 1200 |
| UAV 3 (Quad-rotor) | 4 | 0.5 | 1500 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, S.-W.; Park, J.-H.; Park, H.-J.; Kim, S. Multi-UAV Coverage Path Planning Based on Hexagonal Grid Decomposition in Maritime Search and Rescue. Mathematics 2022, 10, 83. https://doi.org/10.3390/math10010083
Cho S-W, Park J-H, Park H-J, Kim S. Multi-UAV Coverage Path Planning Based on Hexagonal Grid Decomposition in Maritime Search and Rescue. Mathematics. 2022; 10(1):83. https://doi.org/10.3390/math10010083
Chicago/Turabian StyleCho, Sung-Won, Jin-Hyoung Park, Hyun-Ji Park, and Seongmin Kim. 2022. "Multi-UAV Coverage Path Planning Based on Hexagonal Grid Decomposition in Maritime Search and Rescue" Mathematics 10, no. 1: 83. https://doi.org/10.3390/math10010083
APA StyleCho, S. -W., Park, J. -H., Park, H. -J., & Kim, S. (2022). Multi-UAV Coverage Path Planning Based on Hexagonal Grid Decomposition in Maritime Search and Rescue. Mathematics, 10(1), 83. https://doi.org/10.3390/math10010083