1. Introduction
Robust optimization has become a prominent predetermined framework for investigating multi-objective optimization problems with data uncertainty. Robust optimization is a relatively new field of research that allows academicians to solve a wide range of optimization problems, particularly when challenged with real-life situations where the data input for a multi-objective linear semi-infinite program is frequently noisy or uncertain due to prediction or measurement inaccuracies, as well as in industrial settings. Under this framework, the objective and constraint functions are only considered to belong to “uncertainty sets” in function space. For single-objective optimization problems, Soyster [
1] was the first researcher to study robust optimization problem. Quality products are necessary in sectors as the engineering environment grows increasingly competitive. Variations in various engineering procedures generate unexpected deviations from the function that a designer intended for. The goal of robust design is to avoid such occurrences. In industrial engineering, robust design has been developed to improve product quality and reliability. “Robustness is defined as the capacity of a technology, product, or process to work with little sensitivity to elements that cause unpredictability (in the manufacturing or user environment) and ageing while maintaining the lowest unit manufacturing cost.” explained Taguchi [
2], the pioneer of robust design. For more recent developments on robust optimization problems, the readers are advised to refer to [
3,
4,
5,
6,
7,
8]. Lee et al. [
9] and Oksanen et al. [
10] used robustness for transforming data to prognostic information and open platform communications technology for agricultural machinery telemetry respectively. Lie et al. [
11] used robustness in electrical machines which greatly increased motor performance and diminished computational cost. Further, robust optimization has several real life applications, readers are advised to refer to [
12,
13,
14,
15].
An interval-valued optimization problem is based on interval coefficients with closed intervals. Interval-valued optimization problems can contribute a more useful alternative for evaluating the uncertainty therein. In recent years, interval-valued optimization has become a major topic in applied mathematics. This is due to the fact that, in many circumstances, the theory regarding the parameters of a physical world system is unknown. Hence, these parameters cannot be accurately evaluated. Many developments in the theory of interval-valued optimization problems have been carefully investigated, readers are advised to refer [
16,
17,
18,
19,
20]. Interval-based models have a wide range of real-world applications such as inventory [
21], genetic algorithm [
22] and engineering applications [
23].
There are numerous mathematical models that are employed in applied mathematics, economics, engineering, stochastics management and decision sciences for which convexity is no longer sufficient. Various expansions of convex functions have been proposed in the literature. Many of these functions provide more than one property resulting in models that are better adaptable to real-world conditions than convex models. Beginning with the pioneering work of Arrow and Enthoven [
24], efforts were formed to cripple the convexity assumption and thus investigate the application of optimality conditions. In this attempt, Hanson [
25] introduced a new category of functions which are applicable to optimization theory, which was termed as the category of invex functions by Craven [
26]. Some of the recent advances related to generalized convexity with applications to group dynamic problems, portfolio and location theory were analysed in detail, readers are advised to refer to [
27,
28,
29].
The basic purpose of multi-objective optimization research is to identify the best possible objective values by finding the global Pareto efficient solution. In practice, users may be less interested in discovering so-called global best solutions, especially if they are extremely sensitive to variable perturbations, which are unavoidable in practice. Practitioners are interested in building robust solutions that are less vulnerable to minor alterations in these situations. Hence, in this paper we emphasis the robustness for a nonsmooth interval-valued optimization problem.
The general problem dealing with minimizing (or maximizing) functions that are generally not differentiable at their minimizers (or maximizers) refers to nonsmooth optimization. Nonsmooth calculus, an extension of differential calculus, has recently become a key advancement in mathematical sciences, particularly in the fields of mathematics, operations research and engineering. Suneja et al. [
30] used Clarke’s generalized gradients to develop generalized convexity and optimality conditions related to vector optimization problem along with duality results in Mond-Weir type problems. Chen et al. [
31] employed a modified objective function approach to examine the optimality conditions which are applicable to multi-objective fractional programming problems and a family of nonsmooth multi-objective optimization problems with cone constraints. In [
32], Lee and Son explored the necessary optimality theorem for a nonsmooth optimization problem in the presence of data uncertainty. In the face of data uncertainty, Lee and Lee [
33] have interpreted nonsmooth optimality theorems for weakly and properly robust efficient solutions to a nonsmooth multi-objective problem with more than two locally Lipschitz objective and constraint functions. In [
34], Chuong studied optimality conditions for robust (weakly) pareto-optimal solutions which are in terms of limiting subdifferentials and multipliers. The primal and its robust dual problem (strictly) with generalized convexity assumptions were investigated further for weak/strong duality relations. There are no results on robust
-optimal solution of nonsmooth/nonconvex uncertain constrained interval-valued optimization problem (UCIVOP), that we are aware of.
Guided by the above works, this paper uses a robust methodology to analyse a nonsmooth/nonconvex uncertain constrained interval-valued optimization problem (UCIVOP). The details of the manuscript are given as follows.
Section 2 recalls some preliminary definitions and basic results.
Section 3 establishes robust optimality conditions for (UCIVOP), based on the assumptions of generalized convexity.
Section 4 and
Section 5 are concerned with the formulation of Wolfe and Mond-Weir type robust dual problems over cones involving generalized convexity assumptions, followed by the development of duality results.
Section 6 deals with the conclusion.
2. Preliminaries
Let and denote respectively n-dimensional Euclidean space and its non-negative orthant. Let be the set of all closed bounded intervals in . Suppose , then
- (i)
- (ii)
- (iii)
- (iv)
- (v)
where .
For
and
, the partial ordering
on
is defined as
if and only if
and
. Moreover, we represent
if and only if
along with
. In other words,
if and only if
A nonempty subset L of is a convex cone if and for all . A proper, closed and convex cone with nonempty interior is denoted by . Let be a nonempty, convex and compact subset of , for and . Let and be an interval-valued and vector-valued mappings and for , where the transpose T is the superscript. stands for the interior of . is the dual cone of .
In this article, we consider the subsequent uncertain constrained interval-valued optimization problem (UCIVOP):
where
is a proper, closed and convex cone,
is the vector of uncertain parameter with
,
and
is the vector of decision variable. The uncertainty set-valued function
is given by
,
. For the sake of convenience, we set
. As
are nonempty, convex and compact sets for all
,
is a nonempty, convex and compact subset of
. We assume
and
without losing generality throughout this study.
In this study, we use a robust methodology to explore (UCIVOP). The robust counterpart of (UCIVOP) is as follows:
A vector is a feasible solution of (RIVOP), it is said to be a robust feasible solution of (UCIVOP). The collection of all robust feasible solutions of (UCIVOP) is denoted by where .
Definition 1. The robust feasible point is refered to as a robust -optimal solution of (UCIVOP), if there is no robust feasible solution of (UCIVOP) such that .
We offer numerous specific scenarios to emphasise the generality of our interval-valued robust optimization problems (IVROPs).
Case (i). If
for all
, then (UCIVOP) reduces to the subsequent problem:
which is the robust optimization problem (ROP). Many researchers [
35,
36,
37] have examined the Karush-Kuhn-Tucker type necessary optimality conditions for (ROP).
Case (ii). If the constraint functions are independent of the uncertainty parameter
, for each
then (UCIVOP) reduces to the subsequent interval-valued optimization problem:
Ishibuchi and Tanaka [
38], Inuiguchi and Kume [
39] and Wu [
40,
41] investigated the Karush-Kuhn-Tucker necessary optimality conditions of the interval-valued optimization problems based on the assumption that each of the constraints are convex and continuously differentiable.
Definition 2. (See, Chen et al. [42]) A real-valued function is a locally Lipschitz if and only if, for any , there exist a positive constant τ and a neighborhood of v such that, for any ,where stands for any norm in . The Clarke’s generalized subgradient (See, Clarke [
43]) of
h at
v is
, where
clearly,
It is generally known that if is a locally Lipschitz function, then the Clarke’s generalized subgradient is nonempty and compact-valued function as well as upper semicontinuous on i.e., for any sequences and of with and , , there exists a subsequence . An interval-valued function is said to be locally Lipschitz on if and only if , are locally Lipschitz on . Throughout this paper, we will always presume that , are locally Lipschitz functions on and that is locally Lipschitz function on with respect to the first argument and its components are upper semicontinuous with respect to the second argument.
Definition 3. Let be type II -generalized convex at . If for each and , , , , there exists such that Definition 4. (i)
. is pseudo convex at , if for any and the following holds:(ii)
. is strictly pseudo convex at , if for any and the subsequent equation holds:(iii)
. is generalized quasi convex at , if for any and the following holds: Definition 5. is type I -pseudo convex at , if are pseudo convex functions and φ is generalized quasi convex at .
Definition 6. is type II -pseudo convex at , if are strictly pseudo convex functions and φ is generalized quasi convex at .
Remark 1. It is noted that the Definitions 4–6 are properly wider than convex functions (see [44], Example 2.2 and [34], Example 3.10). Definition 7. (See, Chen et al. [42]) Let be a nonempty subset of . is said to be -convexlike if the set is convex. Definition 8. (See, Chen et al. [42]) The generalized robust Slater constraint qualification (GRSCQ) is satisfied if there exists such that . Lemma 1. (See, Chen et al. [42]) Let be a closed convex cone with . Then,, . The following is always denoted by Assumption
(See, Chen et al. [
42]) in the rest of this work.
(B1): With respect to the first argument,
is locally Lipschitz and uniformly on
with respect to the second argument i.e., for each
, there is a positive constant
K and an open neighborhood
of
such that
(B2): For each
, the function
is concave on
. We define a family of real-valued functions
,
, for each
as follows:
Since
is upper semicontinuous and
is nonempty, convex and compact for each
,
is clearly defined. By the auxiliary function (
1), the following is an equivalent description of the set
of robust feasible solutions.
4. Wolfe Type Robust Dual Problem
Let us examine the subsequent Wolfe type robust dual problem for (UCIVOP).
The robust feasible set of (WIRD) is represented as , which is the set of all points of the form that satisfies the constraints of (WIRD).
Remark 2. (i). If for all , then (WIRD) model reduces to Wolfe type dual model (WRD) of Chen et al. [42]. (ii). In the absence of uncertain parameter ρ in the constraints, the (WIRD) model reduces to (WD) model of Singh et al. [45]. Definition 9. The robust feasible point is called a robust -optimal solution of (WIRD), if there does not exist a robust feasible solution of (WIRD) such that .
The following section describes the duality results between (UCIVOP) and (WIRD).
Theorem 4 (Weak Duality)
. Let and If is type II -generalized convex at , then the subsequent inequality cannot hold: Proof. Since
,
, then the preceeding inequalities together yield
Since
, we obtain
,
,
,
By using (
21), the inequality (
20) gives
Since
is type II
-generalized convex at
, then there exists
such that
From the above inequalities, one has
Combining the above inequalities, we get
By using (
23), the inequality(
24) implies
which contradicts (
22) and hence the theorem. □
We now re-explore Example 1 to demonstrate Theorem 4.
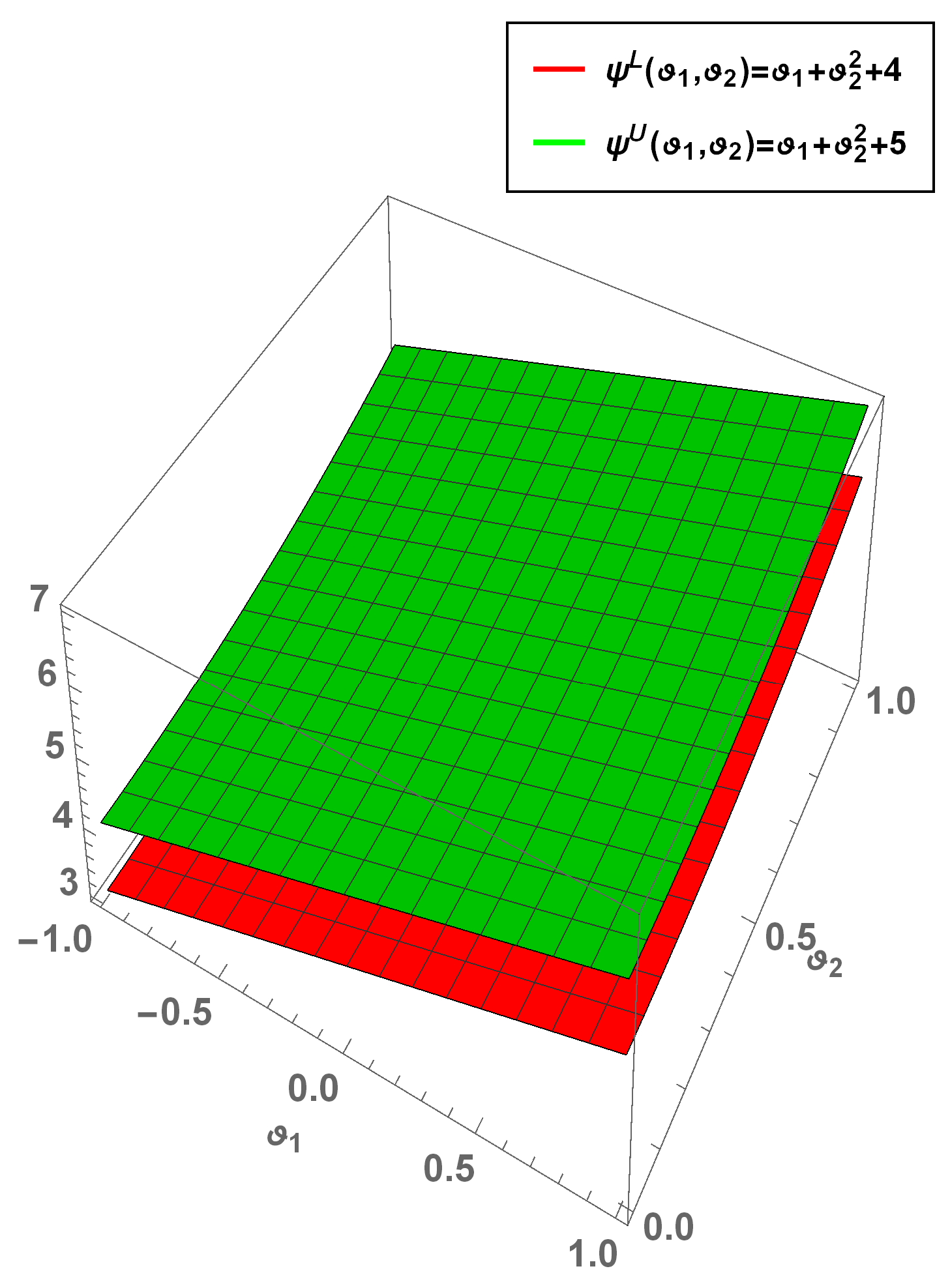
Example 2. Let us examine the uncertain constrained interval-valued optimization problem. Let and φ be same as Example 1. The robust counterpart of (UCIVOP-1) is defined as follows:where . Recall that the robust feasible set of (RIVOP-1) is . We consider a Wolfe type robust dual problem (WIRD-1) for (RIVOP-1) as follows:where , and . Again from Example 1, we have where , , . For any , we conclude that , , . Hence, it follows From the above equation, we get and . Combining these equations along with and , we obtain , . Taking into account , and , we have, Therefore, weak duality theorem of (WIRD-1) holds.
Theorem 5 (Strong Duality). Let be a robust -optimal solution of (UCIVOP) and (GRSCQ) hold. Assume that φ satisfy the Assumption , ϕ is -convexlike and , be -convexlike. Then, there exist , , such that . Furthermore, if is type II -generalized convex at , where then is a robust -optimal solution of (WIRD).
Proof. As a result of Theorem 1, there exist
,
,
such that
and
By Theorem 4, the subsequent inequality does not hold:
This implies is a robust -optimal solution of (WIRD). □
Theorem 6 (Converse Duality). Let be a robust -optimal solution of (WIRD) with . If is type II -generalized convex at , then is a robust -optimal solution of (UCIVOP).
Proof. Since
is a robust
-optimal solution of (WIRD) and
. Then, it follows from Theorem 4, the subsequent inequality does not hold:
This implies, the subsequent inequality does not hold: .
Hence, is a robust -optimal solution of (UCIVOP). □
5. Mond-Weir Type Robust Dual Problem
Let us examine the subsequent Mond-Weir type robust dual problem for (UCIVOP).
It is worth mentioning that (MWIVRD) is viewed as a likely version to the Mond-Weir type robust dual problem of (UCIVOP).
where
is an uncertain parameter.
The robust feasible set of (MWIVRD) is denoted by , which is the set of all points of the form that satisfies the constraints of (MWIVRD).
Remark 3. (i). If for all , then (MWIVRD) reduces to Mond-Wier type dual model (MWRD) of Chen et al. [42]. (ii). In the absence of uncertain parameter ρ in the constraints, the (MWIVRD) reduces to (MWD) model of Singh et al. [45]. Definition 10. The robust feasible point is called a robust -optimal solution of (MWIVRD), if there does not exist a robust feasible solution of (MWIVRD) such that
The following section describes the duality results between (UCIVOP) and (MWIVRD).
Theorem 7 (Weak Duality). Let and .
(i). If is type I -pseudo convex at , then the subsequent inequality cannot hold: (ii). If is type II -pseudo convex at , then the subsequent inequality cannot hold:
Proof. Firstly we validate (i).
Since
,
, then the preceeding inequalities together yield
Since
, there exist
,
,
such that
By virtue of (
28), there exist
,
,
such that
Since
is type I
-pseudo convex at
, for any
and
the following hold:
By using the inequalities (
26), (
30) and (
31), we obtain
The inequality (
33) along with (
29) gives
Since , we get , for some .
Since
and using (
27) in the inequality (
32) with
, we have
This is a contradiction to (
35).
Assertion (ii) is proved similar to part (i) by using the type II pseudo convexity of at . □
We demonstrate weak duality theorem by the subsequent illustration.
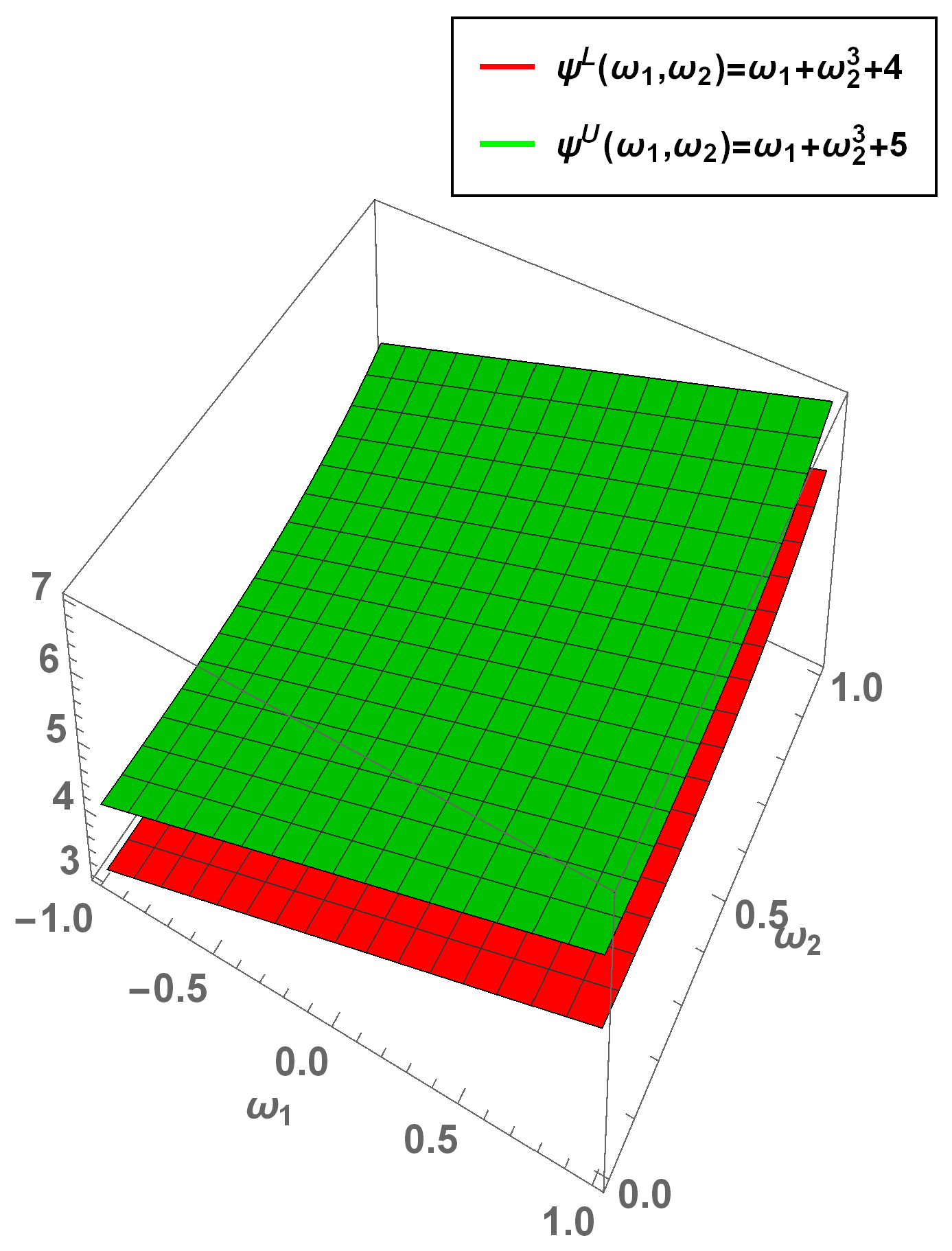
Example 3. Consider the subsequent uncertain constrained interval-valued optimization problem. The robust counterpart of (UCIVOP-2) is defined as follows:where . Clearly, the robust feasible set of (RIVOP-2) is . We consider a Mond-Weir type robust dual problem (MWIVRD-2) for (RIVOP-2) as follows: Clearly, is type I and type II -pseudo convex at (See Figure 2). It follows from Example 1, we have where , , . For any , , , , we get The above equation yields and . Combining these equations along with , we obtain . Since, , that is, Since and , we have This implies, for . Taking into account , and , we get, Therefore, weak duality theorem of (MWIVRD-2) holds.
Theorem 8 (Strong Duality). Let be a robust -optimal solution of (UCIVOP) and (GRSCQ) hold. Assume that φ satisfy the Assumption , ϕ is - convexlike and , be -convexlike. Then, there exist , , such that .
- (i).
If is type I -pseudo convex at where , then is a robust -optimal solution of (MWIVRD).
- (ii).
If is type II -pseudo convex at where , then is a robust -optimal solution of (MWIVRD).
Proof. Let
be a robust
-optimal solution of (UCIVOP) and (GRSCQ) hold. Then by Theorem 1, there exist
,
,
such that
satisfies
Hence, .
To prove (i).
As
is type I pseudo convex at
and utilizing the assumption (i) of Theorem 7, we get that the subsequent inequality does not hold:
which implies that
is a robust
-optimal solution of (MWIVRD).
(ii). As
is type II pseudo convex at any
and utilizing the assumption (ii) of Theorem 7, we get that the subsequent inequality cannot hold:
which implies that
is a robust
-optimal solution of (MWIVRD). □
Theorem 9 (Converse Duality). Let be a robust -optimal solution of (MWIVRD) with .
- (i).
If is type I -pseudo convex at , then is a robust -optimal solution of (UCIVOP).
- (ii).
If is type II -pseudo convex at , then is a robust -optimal solution of (UCIVOP).
Proof. To prove (i).
Since
is a robust
-optimal solution of (MWIVRD) with
. As
is type I pseudo convex at
and utilizing the assumption (i) of Theorem 7, the subsequent inequality does not hold:
Hence, is a robust -optimal solution of (UCIVOP).
(ii) As
is type II pseudo convex at any
and utilizing the assumption (ii) of Theorem 7, the subsequent inequality cannot hold:
Hence, is a robust -optimal solution of (UCIVOP). □



{kind=link}
{kind=link}

