
Coexisting Attractor in a Gyrostat Chaotic System via Basin of Attraction and Synchronization of Two Nonidentical Mechanical Systems


Abstract
:1. Introduction
- Qi et al. [11] modeled a gyrostat chaotic system and discussed its bifurcation using energy functions.
- In 2021, Sabir et al. [42] considered the same model of gyrostat for the existence of oscillatory solutions. The authors also worked on bringing stability to their trajectories with the help of an controller.
- In 2022, Marwan et al. [43] designed a full-order generalized observer for fractional-order chaotic systems and used the same gyrostat model as an application.
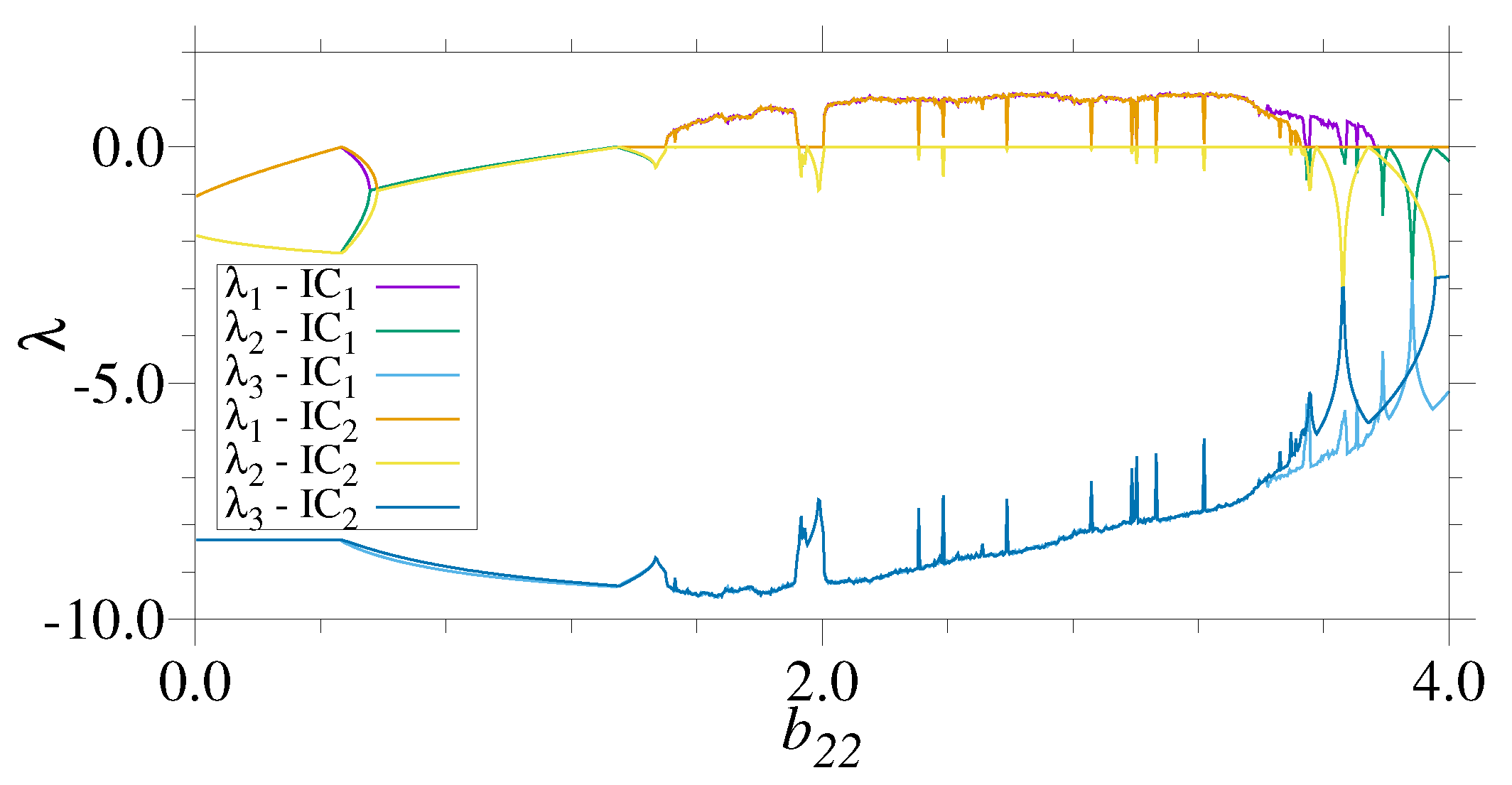
2. Multistability of the Gyrostat System
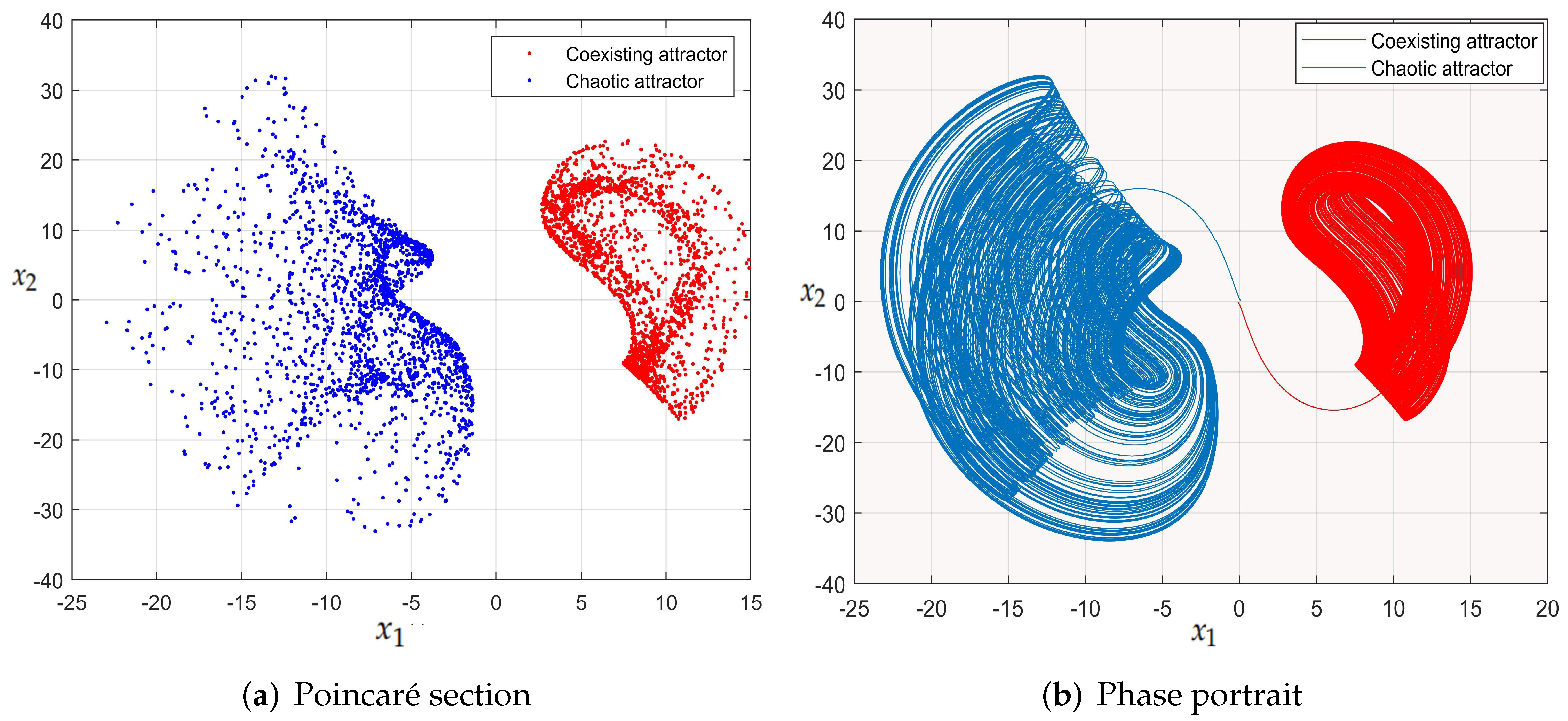
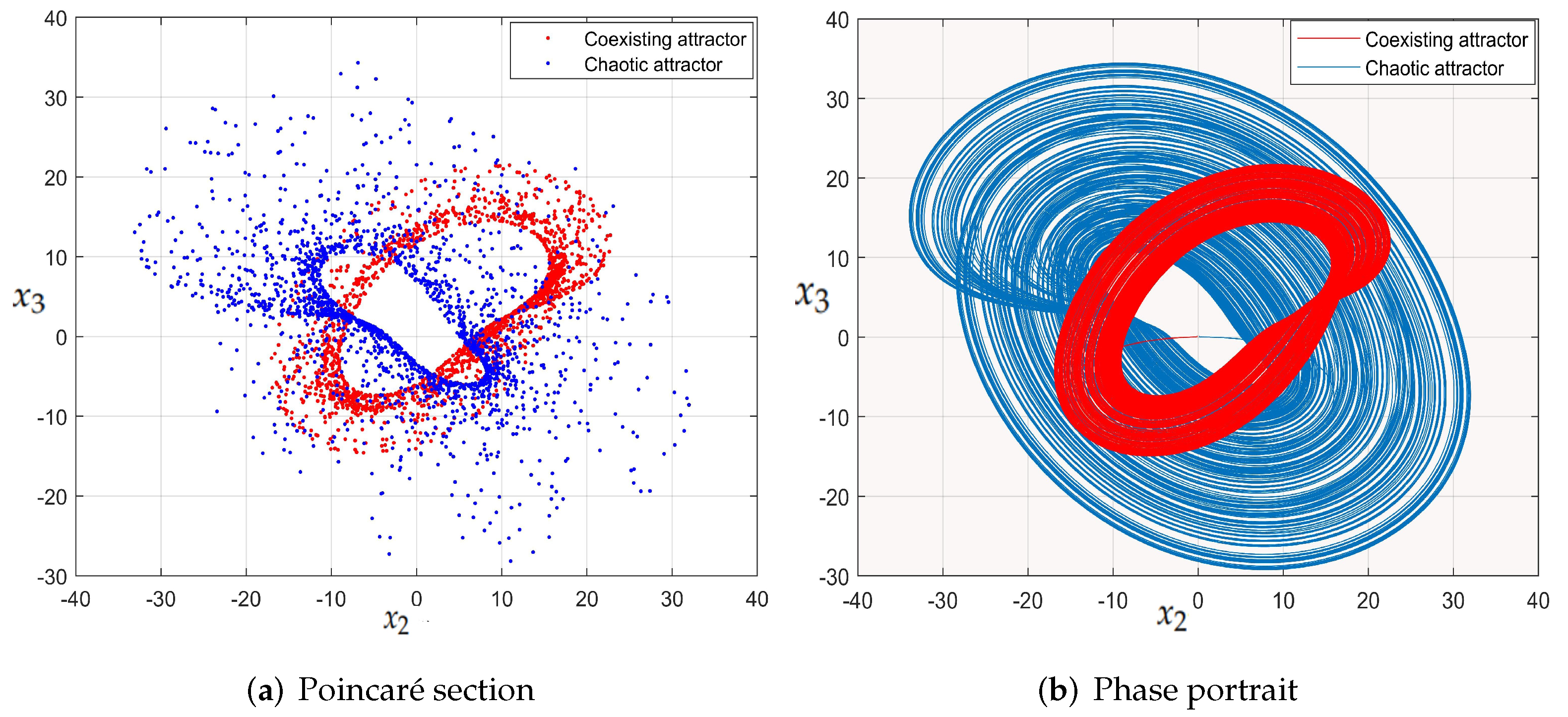
3. Coexisting Attractor Extracted from Second Basin
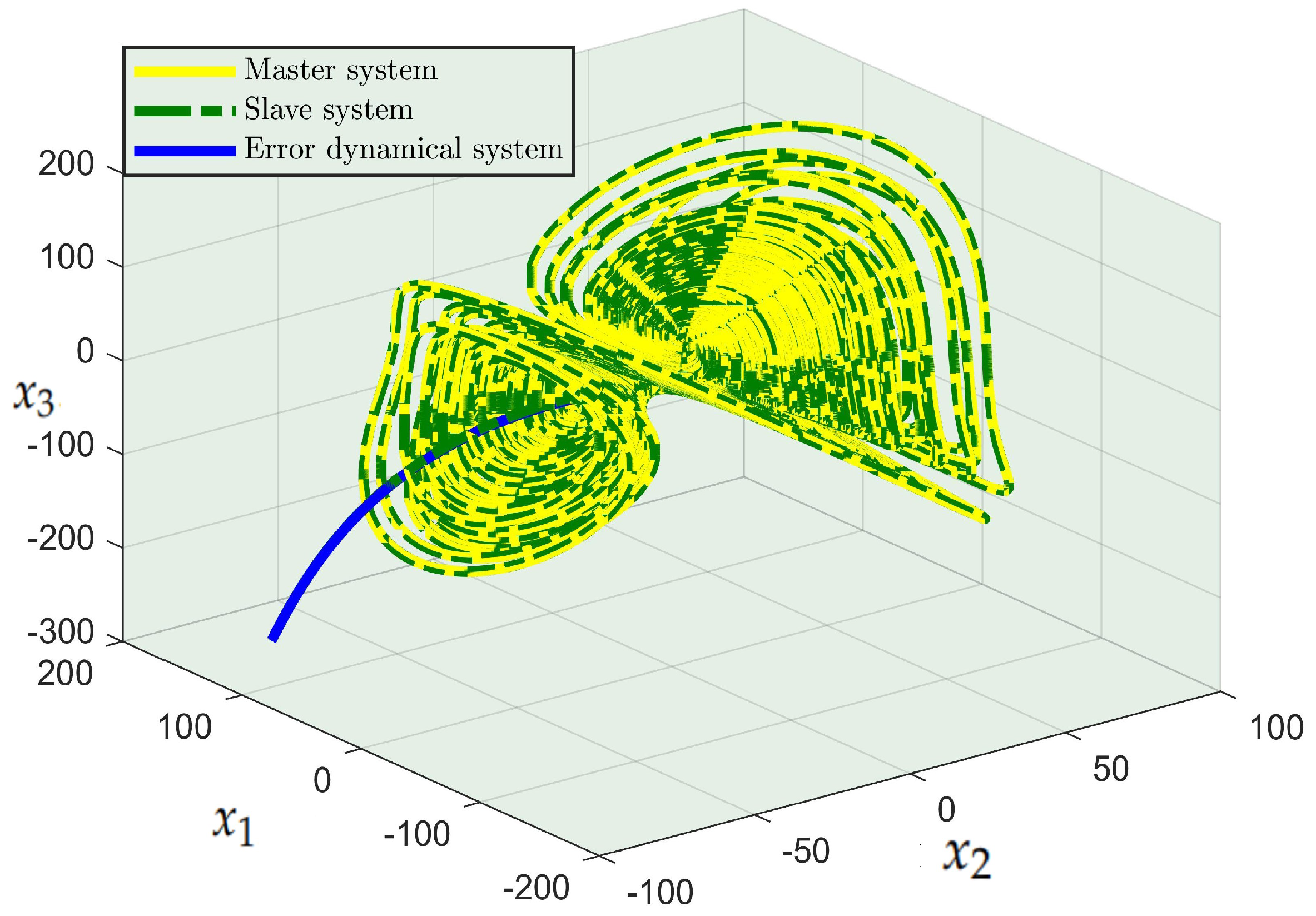
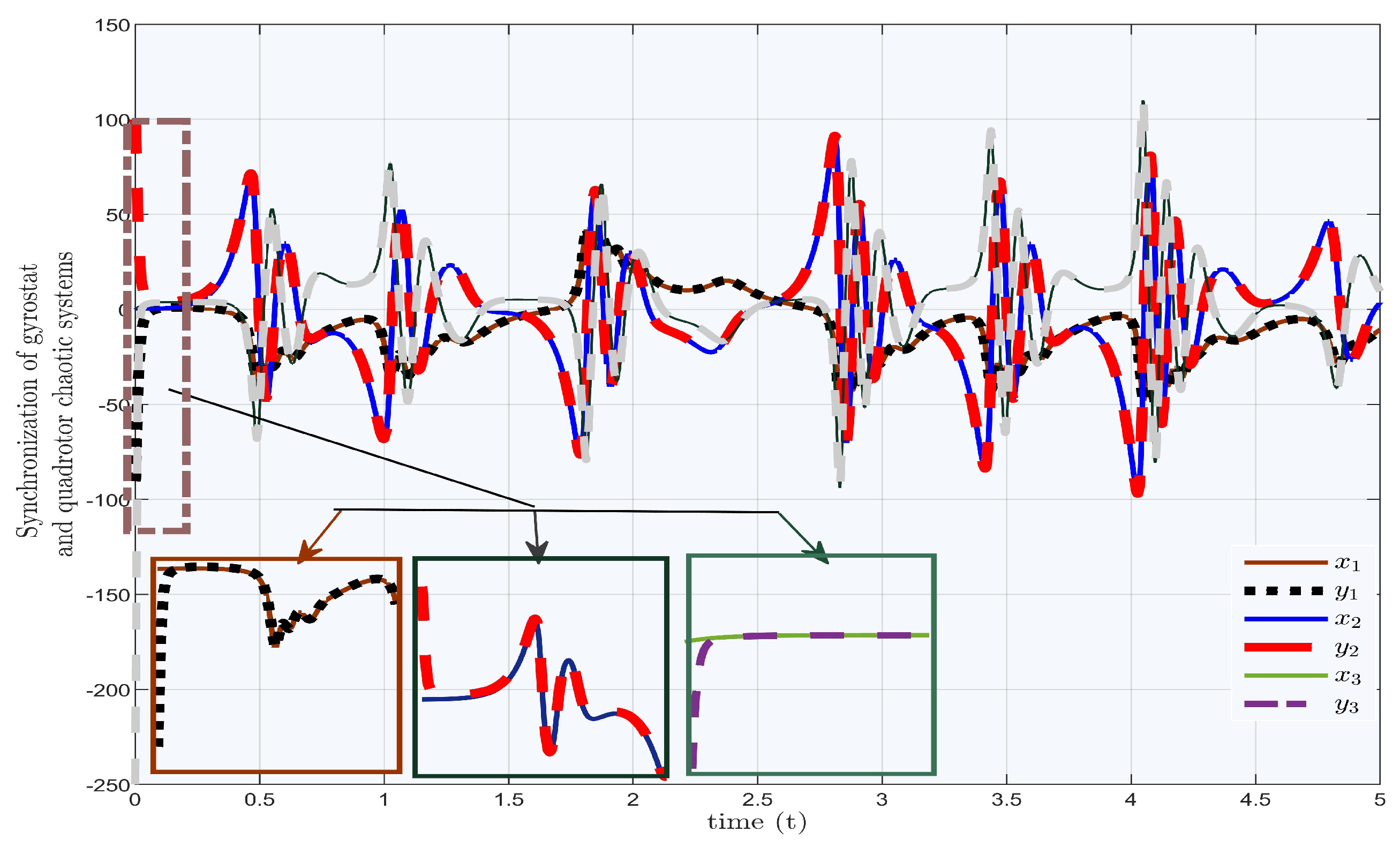
4. Synchronization of Two Nonidentical Mechanical Systems Using Controller
Graphical Validation of Theorem 1
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Vaios, L. A Control Moment Gyro (CMG) Based Attitude Control System (ACS) for Agile Small Satellites. Ph.D. Thesis, University of Surrey, Guildford, UK, 2002. [Google Scholar]
- Jalili, M.M.; Emami, H. Analytical solution for nonlinear oscillation of workpiece in turning process. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 231, 3479–3492. [Google Scholar] [CrossRef]
- Pivarčiová, E.; Božek, P.; Turygin, Y.; Zajačko, I.; Shchenyatsky, A.; Václav, Š.; Císar, M.; Gemela, B. Analysis of control and correction options of mobile robot trajectory by an inertial navigation system. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418755165. [Google Scholar] [CrossRef]
- Qazizada, M.E.; Pivarčiová, E. Mobile robot controlling possibilities of inertial navigation system. Procedia Eng. 2016, 149, 404–413. [Google Scholar] [CrossRef] [Green Version]
- Kose, E.; Muhurcu, A. Comparative Controlling of the Lorenz Chaotic System Using the SMC and APP Methods. Math. Probl. Eng. 2018, 2018, 9612749. [Google Scholar] [CrossRef]
- Lu, X. A Financial Chaotic System Control Method Based on Intermittent Controller. Math. Prob. Eng. 2020, 2020, 5810707. [Google Scholar] [CrossRef]
- Iqbal, J.; Ahmad, S.; Marwan, M.; Shaukat, M. Archive of Applied Mechanics. Cont. Numer. Anal. Cancer Chaotic Syst. 2020, 90, 2597–2608. [Google Scholar]
- Aslanov, V.; Yudintsev, V. Dynamics and chaos control of gyrostat satellite. Chaos Solitons Fractals 2012, 45, 1100–1107. [Google Scholar] [CrossRef]
- Kuang, J.; Tan, S.; Arichandran, K.; Leung, A. Chaotic attitude motion of gyrostat satellite via Melnikov method. Int. J. Bifurc. Chaos 2001, 11, 1233–1260. [Google Scholar] [CrossRef]
- Abtahi, S.M. Melnikov-based analysis for chaotic dynamics of spin–orbit motion of a gyrostat satellite. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2019, 233, 931–941. [Google Scholar] [CrossRef]
- Qi, G.; Yang, X. Modeling of a chaotic gyrostat system and mechanism analysis of dynamics using force and energy. Complexity 2019, 2019, 5439596. [Google Scholar] [CrossRef] [Green Version]
- Chegini, M.; Sadati, H.; Salarieh, H. Chaos analysis in attitude dynamics of a flexible satellite. Nonlinear Dyn. 2018, 93, 1421–1438. [Google Scholar] [CrossRef]
- Chegini, M.; Sadati, H.; Salarieh, H. Analytical and numerical study of chaos in spatial attitude dynamics of a satellite in an elliptic orbit. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 561–577. [Google Scholar] [CrossRef]
- Brett, A.; Kulenović, M.R. Basins of attraction for two-species competitive model with quadratic terms and the singular Allee effect. Discret. Dyn. Nat. Soc. 2015, 2015, 847360. [Google Scholar] [CrossRef]
- Bilgin, A.; Kulenović, M.R.; Pilav, E. Basins of attraction of period-two solutions of monotone difference equations. Adv. Differ. Equ. 2016, 2016, 74. [Google Scholar] [CrossRef] [Green Version]
- Garić-Demirović, M.; Kulenović, M.; Nurkanović, M. Basins of attraction of equilibrium points of second order difference equations. Appl. Math. Lett. 2012, 25, 2110–2115. [Google Scholar] [CrossRef] [Green Version]
- Taborda, J.A.; Angulo, F. Computing and controlling basins of attraction in multistability scenarios. Math. Probl. Eng. 2015, 2015, 313154. [Google Scholar] [CrossRef]
- Okamoto, K.; Aoi, S.; Obayashi, I.; Kokubu, H.; Senda, K.; Tsuchiya, K. Fractal mechanism of basin of attraction in passive dynamic walking. Bioinspiration Biomim. 2020, 15, 55002. [Google Scholar] [CrossRef]
- Liu, L.; Tian, Y.; Huang, X. A method to estimate the basin of attraction of the system with impulse effects: Application to the biped robots. In Proceedings of the International Conference on Intelligent Robotics and Applications, Wuhan, China, 15–17 October 2008; Springer: Berlin/Heidelberg, Germany, 2008; pp. 953–962. [Google Scholar]
- Dong, C. Dynamics, Periodic Orbit Analysis, and Circuit Implementation of a New Chaotic System with Hidden Attractor. Fractal Fract. 2022, 6, 190. [Google Scholar] [CrossRef]
- Ding, L.; Cui, L.; Yu, F.; Jin, J. Basin of Attraction Analysis of New Memristor-Based Fractional-Order Chaotic System. Complexity 2021, 2021, 5578339. [Google Scholar] [CrossRef]
- Luo, W.; Ou, Q.; Yu, F.; Cui, L.; Jin, J. Analysis of a new hidden attractor coupled chaotic system and application of its weak signal detection. Math. Probl. Eng. 2020, 2020, 8849283. [Google Scholar] [CrossRef]
- Zhang, X. Constructing a chaotic system with any number of attractors. Int. J. Bifurc. Chaos 2017, 27, 1750118. [Google Scholar] [CrossRef]
- Zhu, Y.; Shang, H. Multistability of the Vibrating System of a Micro Resonator. Fractal Fract. 2022, 6, 141. [Google Scholar] [CrossRef]
- Li, C.; Sprott, J.C.L. Multistability in a butterfly flow. Int. J. Bifurc. Chaos 2013, 23, 1350199. [Google Scholar] [CrossRef]
- Li, C.; Sprott, J.C.L. Coexisting hidden attractors in a 4-D simplified Lorenz system. Int. J. Bifurc. Chaos 2014, 24, 1450034. [Google Scholar] [CrossRef]
- Xiong, A.; Sprott, J.C.; Lyu, J.; Wang, X. 3D printing—The basins of tristability in the Lorenz system. Int. J. Bifurc. Chaos 2017, 27, 1750128. [Google Scholar] [CrossRef]
- Lai, Q.; Chen, S. Generating multiple chaotic attractors from Sprott B system. Int. J. Bifurc. Chaos 2016, 26, 1650177. [Google Scholar] [CrossRef]
- Li, C.; Thio, W.; Sprott, J.; Iu, H.; Xu, Y. Constructing infinitely many attractors in a programmable chaotic circuit. IEEE Access 2018, 6, 29003–29012. [Google Scholar] [CrossRef]
- He, Y.; Zheng, S.; Yuan, L. Dynamics of Fractional-Order Digital Manufacturing Supply Chain System and Its Control and Synchronization. Fractal Fract. 2021, 5, 128. [Google Scholar] [CrossRef]
- Guillén-Fernández, O.; Meléndez-Cano, A.; Tlelo-Cuautle, E.; Núñez-Pérez, J.C.; Rangel-Magdaleno, J.D.J. On the synchronization techniques of chaotic oscillators and their FPGA-based implementation for secure image transmission. PLoS ONE 2019, 14, e0209618. [Google Scholar] [CrossRef] [PubMed]
- Tlelo-Cuautle, E.; Rangel-Magdaleno, J.; Pano-Azucena, A.D.; Obeso-Rodelo, P.; Nuñez-Perez, J.C. FPGA realization of multi-scroll chaotic oscillators. Commun. Nonlinear Sci. Numer. Simul. 2015, 27, 66–80. [Google Scholar] [CrossRef]
- Moysis, L.; Gupta, M.K.; Mishra, V.; Marwan, M.; Volos, C. Observer design for rectangular descriptor systems with incremental quadratic constraints and nonlinear outputs—Application to secure communications. Int. J. Robust Nonlinear Control 2020, 30, 8139–8158. [Google Scholar] [CrossRef]
- Sabir, M.; Marwan, M.; Ahmad, S.; Fiaz, M.; Khan, F. Observer and descriptor satisfying incremental quadratic constraint for class of chaotic systems and its applications in a quadrotor chaotic system. Chaos Solitons Fractals 2020, 137, 109874. [Google Scholar] [CrossRef] [PubMed]
- González-Zapata, A.M.; Tlelo-Cuautle, E.; Cruz-Vega, I.; León-Salas, W.D. Synchronization of chaotic artificial neurons and its application to secure image transmission under MQTT for IoT protocol. Nonlinear Dyn. 2021, 104, 4581–4600. [Google Scholar] [CrossRef]
- López-Mancilla, D.; López-Cahuich, G.; Posadas-Castillo, C.; Castañeda, C.; García-López, J.; Vázquez-Gutiérrez, J.; Tlelo-Cuautle, E. Synchronization of complex networks of identical and nonidentical chaotic systems via model-matching control. PLoS ONE 2019, 14, e0216349. [Google Scholar] [CrossRef]
- Chen, Y.; Xu, Y.; Lin, Q.; Zhang, X. Model and criteria on the global finite-time synchronization of the chaotic gyrostat systems. Math. Comput. Simul. 2020, 178, 515–533. [Google Scholar] [CrossRef]
- Izadbakhsh, A.; Nikdel, N. Chaos synchronization using differential equations as extended state observer. Chaos Solitons Fractals 2021, 153, 111433. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, W.; Zhao, Y.; Ji, M.; Huang, L. Adaptive State Observers for Incrementally Quadratic Nonlinear Systems with Application to Chaos Synchronization. Circuits Syst. Signal Process 2020, 39, 1290–1306. [Google Scholar] [CrossRef]
- Jahanzaib, L.S.; Trikha, P.; Matoog, R.T.; Muhammad, S.; Al-Ghamdi, A.; Higazy, M. Dual Penta-Compound Combination Anti-Synchronization with Analysis and Application to a Novel Fractional Chaotic System. Fractal Fract. 2021, 5, 264. [Google Scholar] [CrossRef]
- Qi, F.; Qu, J.; Chai, Y.; Chen, L.; Lopes, A.M. Synchronization of Incommensurate Fractional-Order Chaotic Systems Based on Linear Feedback Control. Fractal Fract. 2022, 6, 221. [Google Scholar] [CrossRef]
- Sabir, M.; Ahmad, S.; Marwan, M. Hopf bifurcation analysis for liquid-filled Gyrostat chaotic system and design of a novel technique to control slosh in spacecrafts. Open Phys. 2021, 19, 539–550. [Google Scholar] [CrossRef]
- Marwan, M.; Abidin, M.Z.; Kalsoom, H.; Han, M. Generalized Full Order Observer Subject to Incremental Quadratic Constraint (IQC) for a Class of Fractional Order Chaotic Systems. Fractal Fract. 2022, 6, 189. [Google Scholar] [CrossRef]
- Sprott, J.; Xiong, A. Classifying and quantifying basins of attraction. Chaos Interdiscip. J. Nonlinear Sci. 2015, 25, 083101. [Google Scholar] [CrossRef] [PubMed]
- Wolf, A.; Swift, J.B.; Swinney, H.L.; Vastano, J.A. Determining Lyapunov exponents from a time series. Phys. D Nonlinear Phenom. 1985, 16, 285–317. [Google Scholar] [CrossRef] [Green Version]
- Chlouverakis, K.E.; Sprott, J. A comparison of correlation and Lyapunov dimensions. Phys. D Nonlinear Phenom. 2005, 200, 156–164. [Google Scholar] [CrossRef]
- Clemente-López, D.; Tlelo-Cuautle, E.; de la Fraga, L.G.; de Jesús Rangel-Magdaleno, J.; Munoz-Pacheco, J.M. Poincaré maps for detecting chaos in fractional-order systems with hidden attractors for its Kaplan-Yorke dimension optimization. AIMS Math. 2022, 7, 5871–5894. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic systems. Phys. Rev. Lett. 1990, 64, 821. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Driving systems with chaotic signals. Phys. Rev. A 1991, 44, 2374. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Master stability functions for synchronized coupled systems. Int. J. Bifurc. Chaos 1999, 9, 2315–2320. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Patient-Hall: Nottingham, MD, USA, 1991. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| New Parameters | Old Parameters | Value | Units |
|---|---|---|---|
| 2 | |||
| N/A | |||
| s | |||
| N/A | |||
| s | |||
| 1 | N/A | ||
| s | |||
| 0 | |||
| 0 | |||
| s | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marwan, M.; Dos Santos, V.; Abidin, M.Z.; Xiong, A. Coexisting Attractor in a Gyrostat Chaotic System via Basin of Attraction and Synchronization of Two Nonidentical Mechanical Systems. Mathematics 2022, 10, 1914. https://doi.org/10.3390/math10111914
Marwan M, Dos Santos V, Abidin MZ, Xiong A. Coexisting Attractor in a Gyrostat Chaotic System via Basin of Attraction and Synchronization of Two Nonidentical Mechanical Systems. Mathematics. 2022; 10(11):1914. https://doi.org/10.3390/math10111914
Chicago/Turabian StyleMarwan, Muhammad, Vagner Dos Santos, Muhammad Zainul Abidin, and Anda Xiong. 2022. "Coexisting Attractor in a Gyrostat Chaotic System via Basin of Attraction and Synchronization of Two Nonidentical Mechanical Systems" Mathematics 10, no. 11: 1914. https://doi.org/10.3390/math10111914
APA StyleMarwan, M., Dos Santos, V., Abidin, M. Z., & Xiong, A. (2022). Coexisting Attractor in a Gyrostat Chaotic System via Basin of Attraction and Synchronization of Two Nonidentical Mechanical Systems. Mathematics, 10(11), 1914. https://doi.org/10.3390/math10111914