
Effect of the Impact Coefficient of Restitution on the Nonlinear Dynamics Phenomenon of Flat-Faced Follower Mechanism with Clearance

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Equation of Motion of the Dynamical System
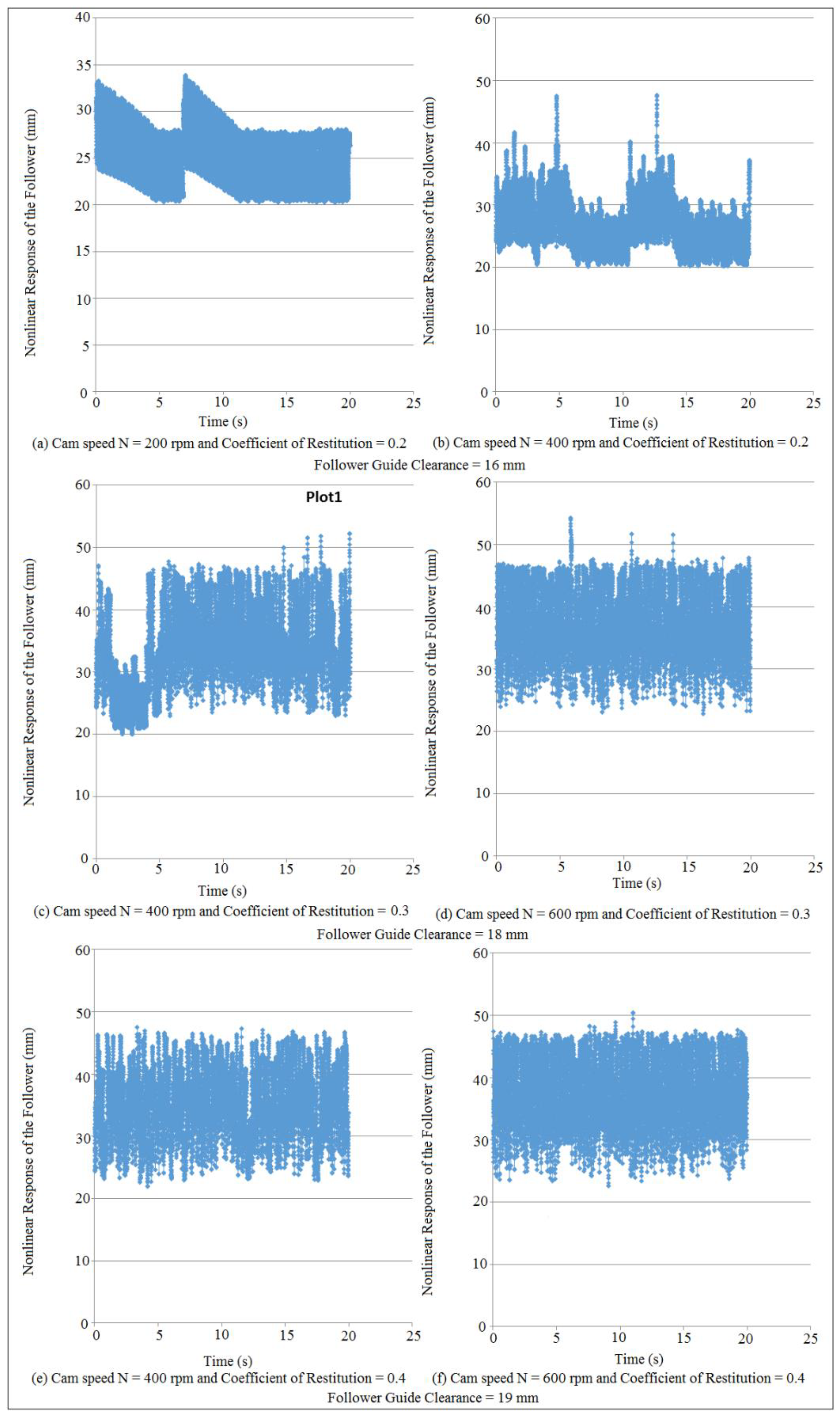
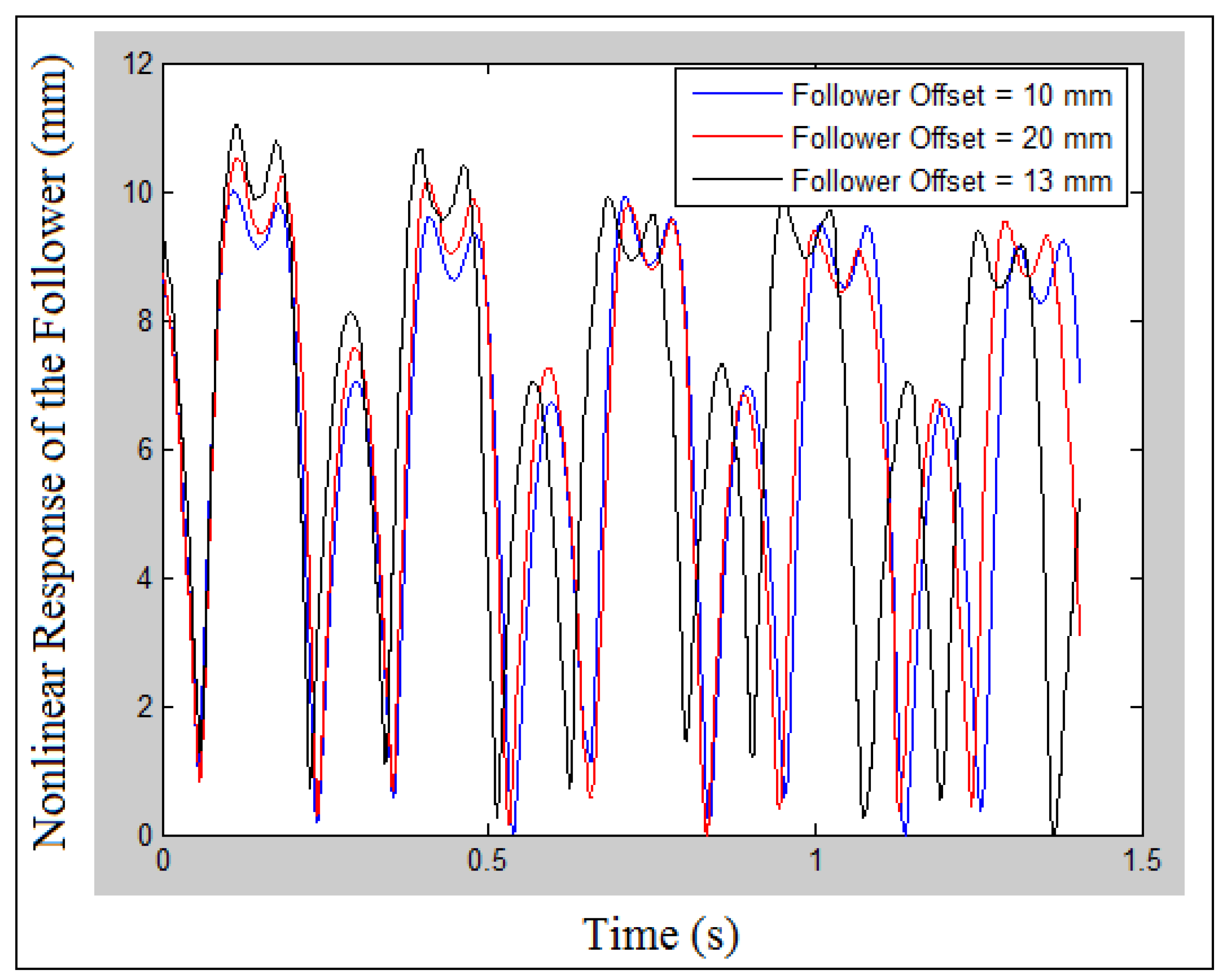
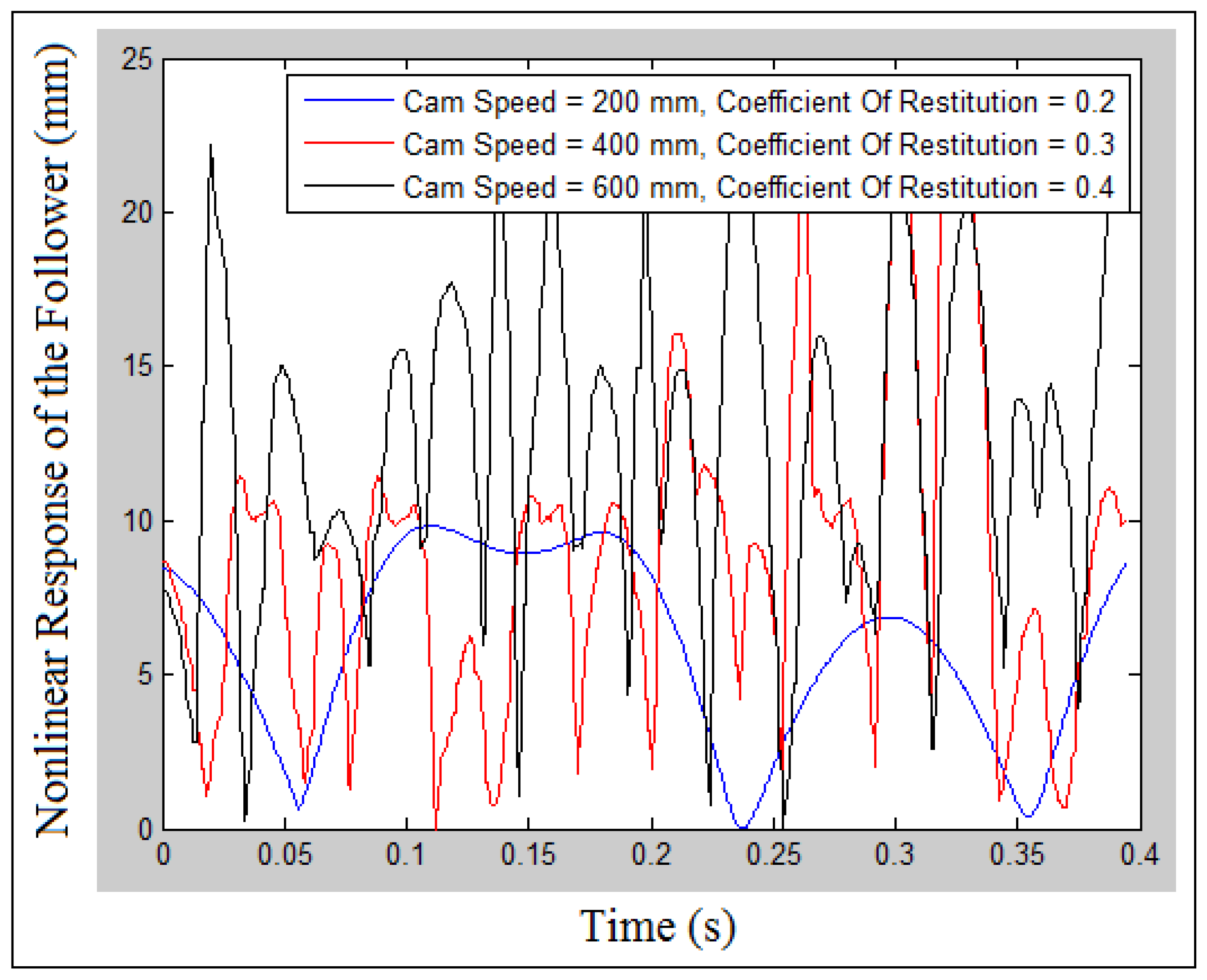
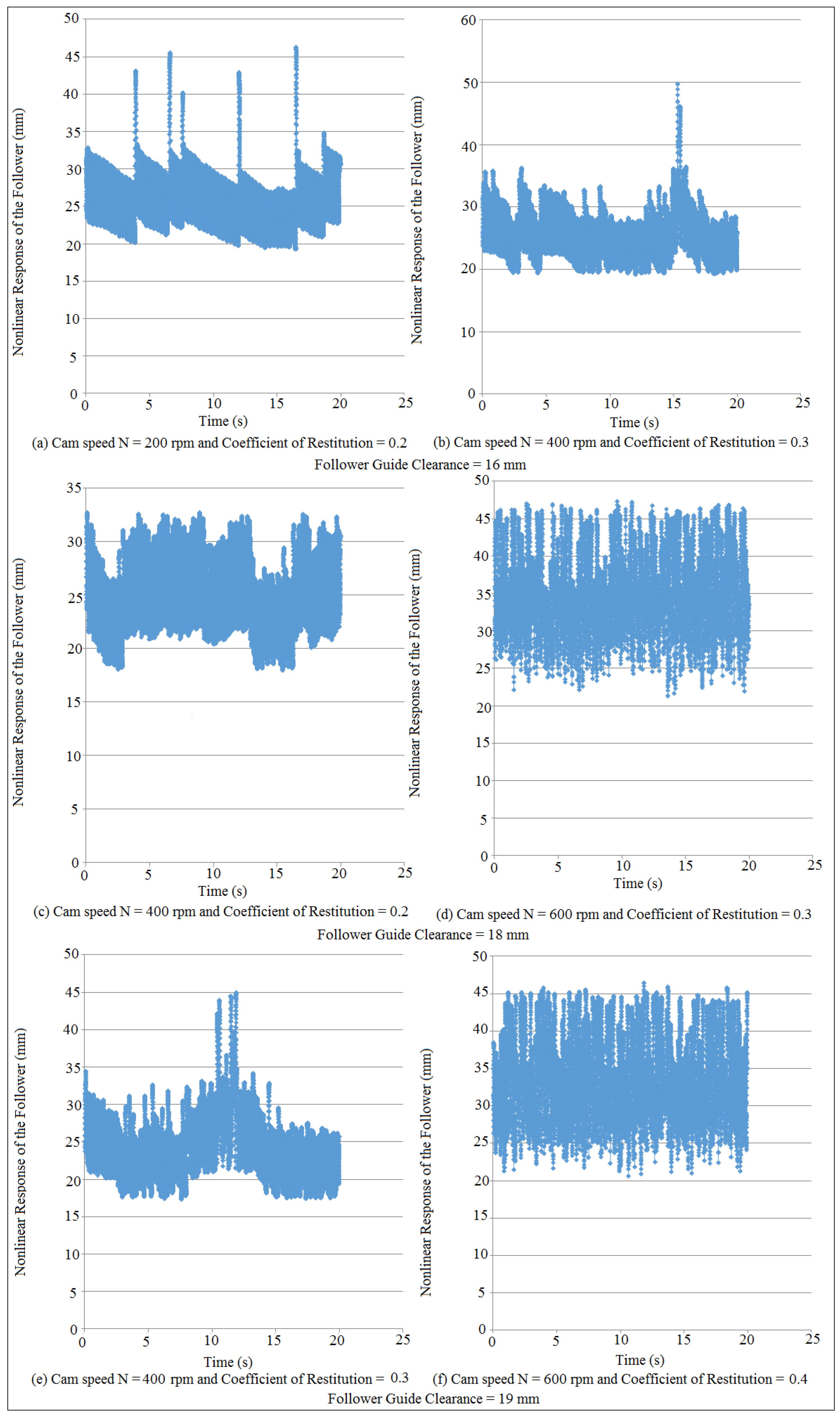
3. Nonlinear Response of the Follower
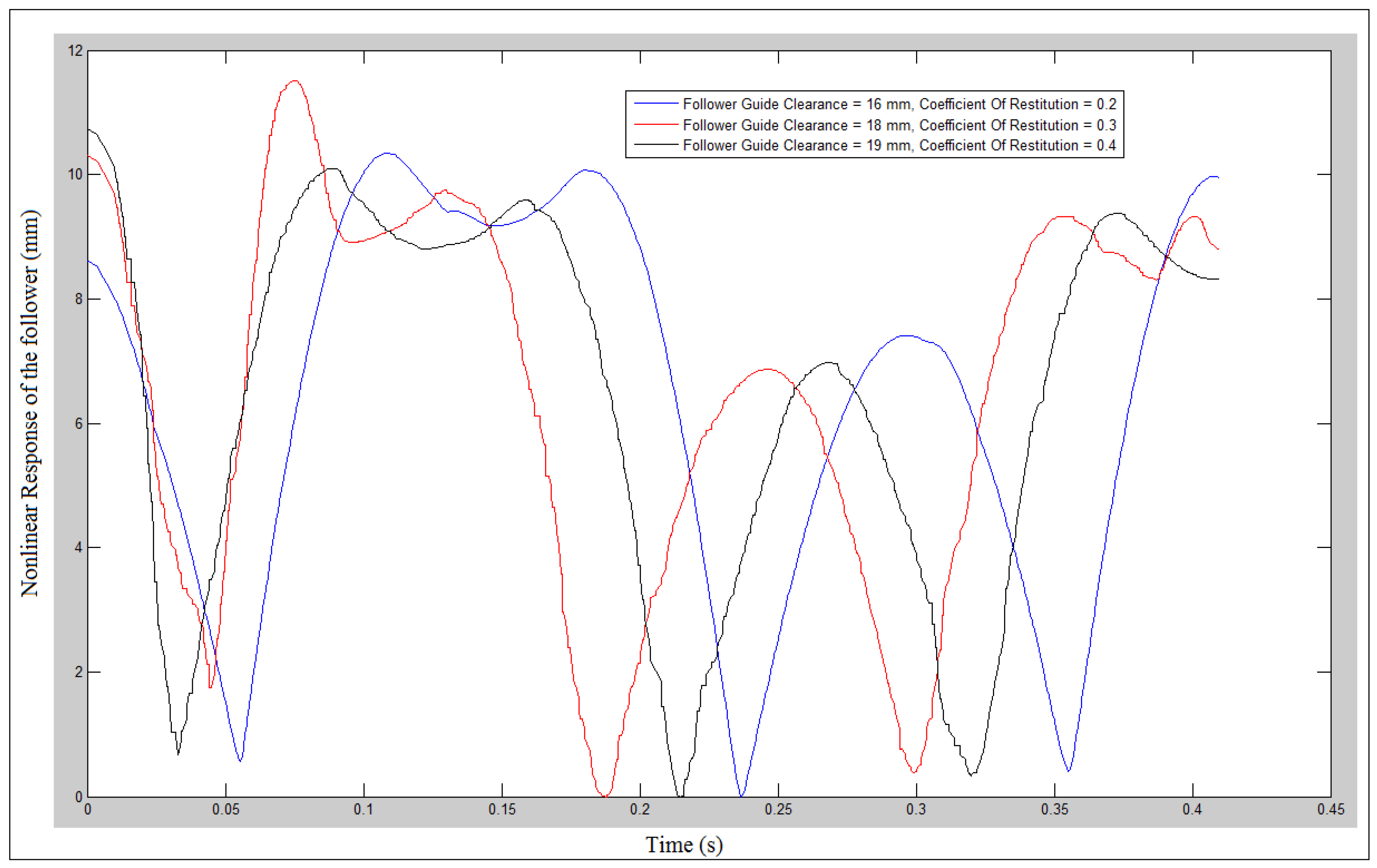
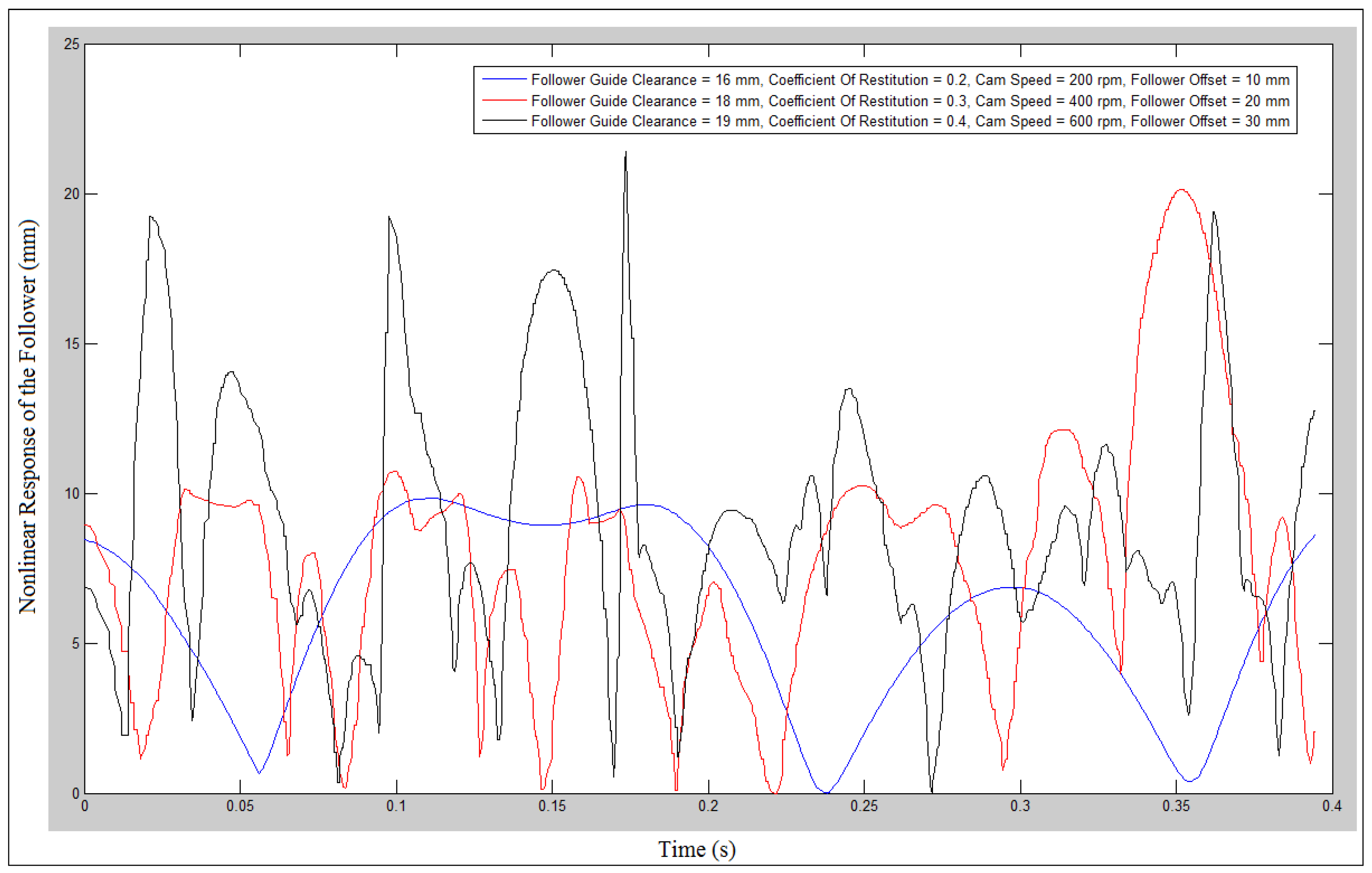
4. Detection of Chaotic Phenomena Using Coefficient of Restitution Parameter
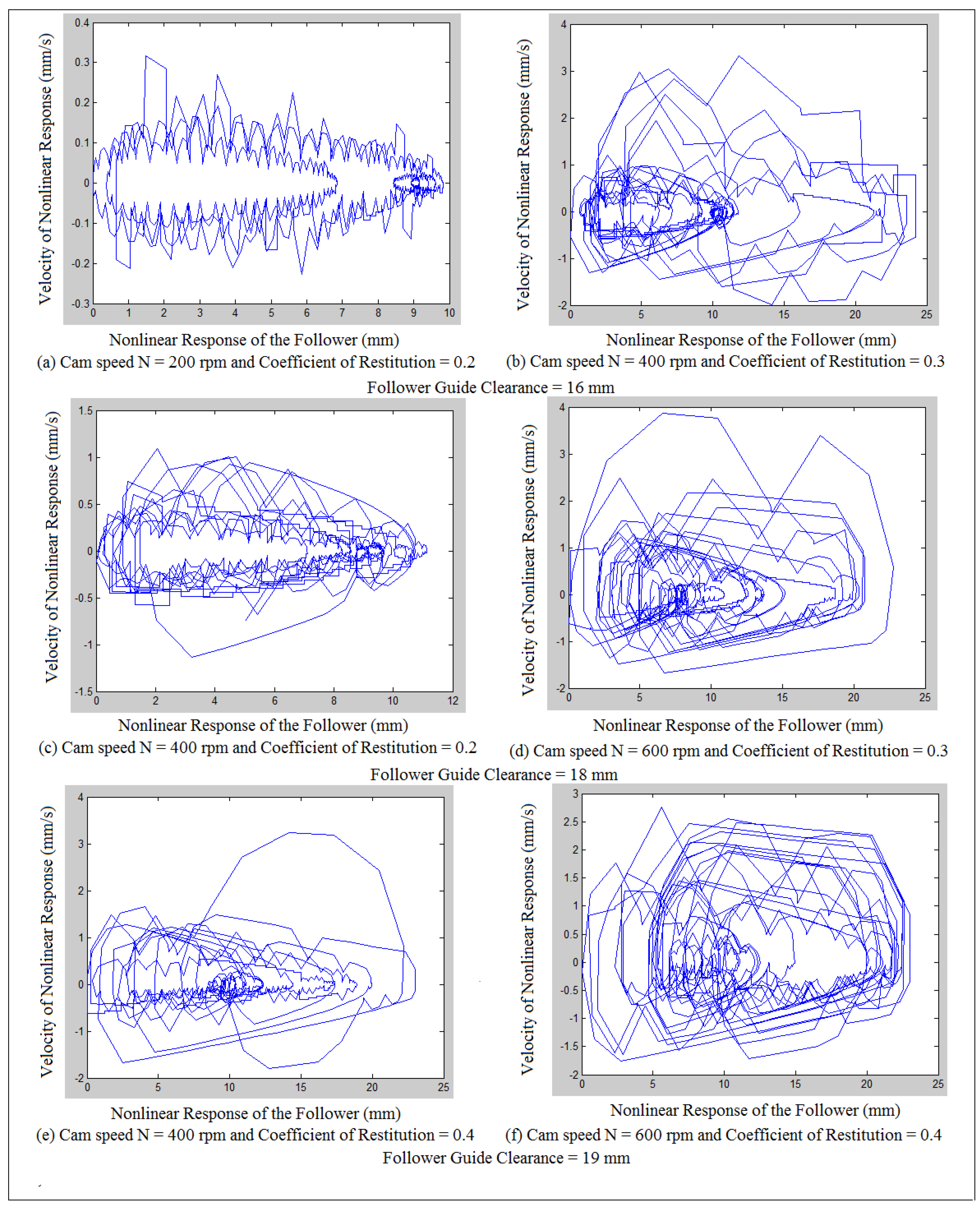
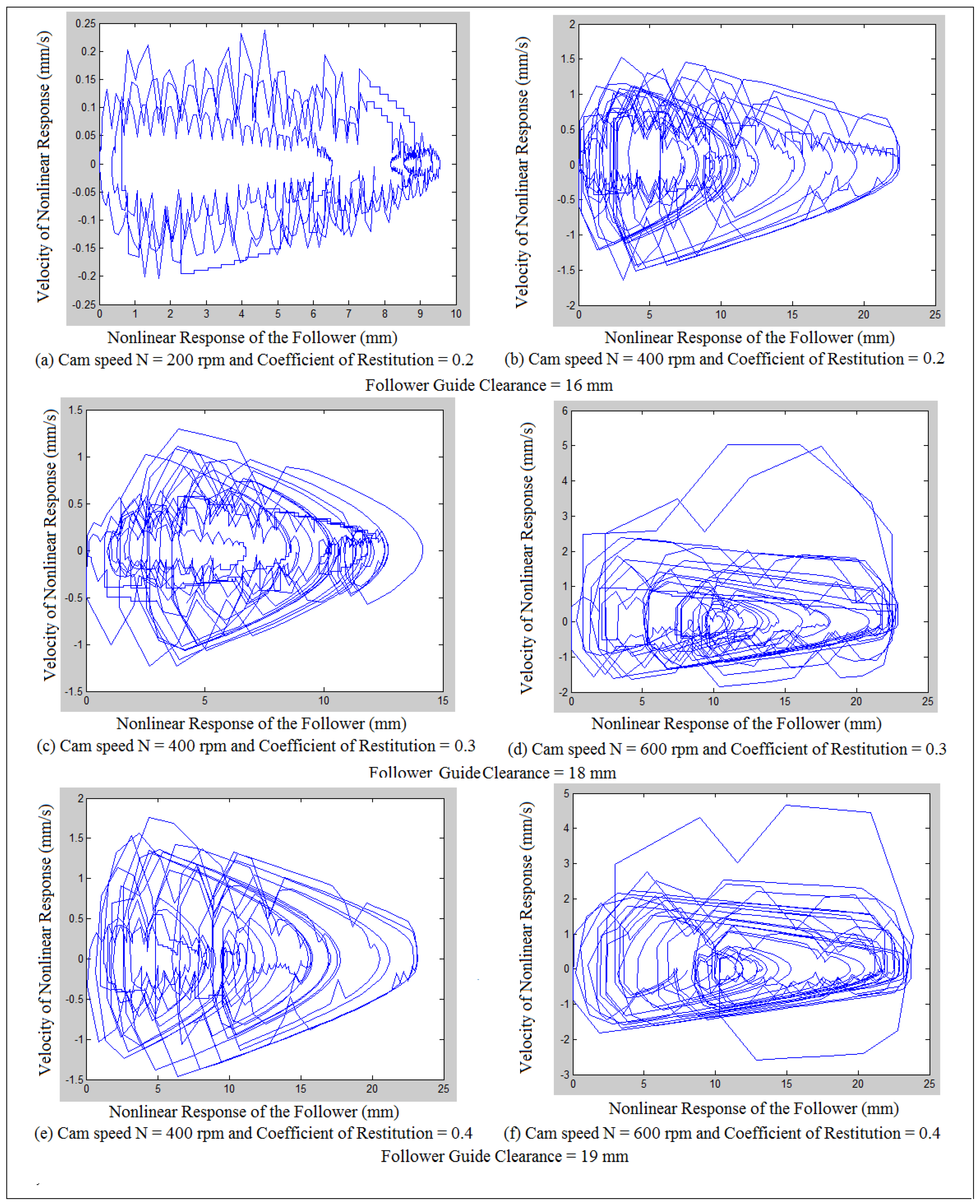
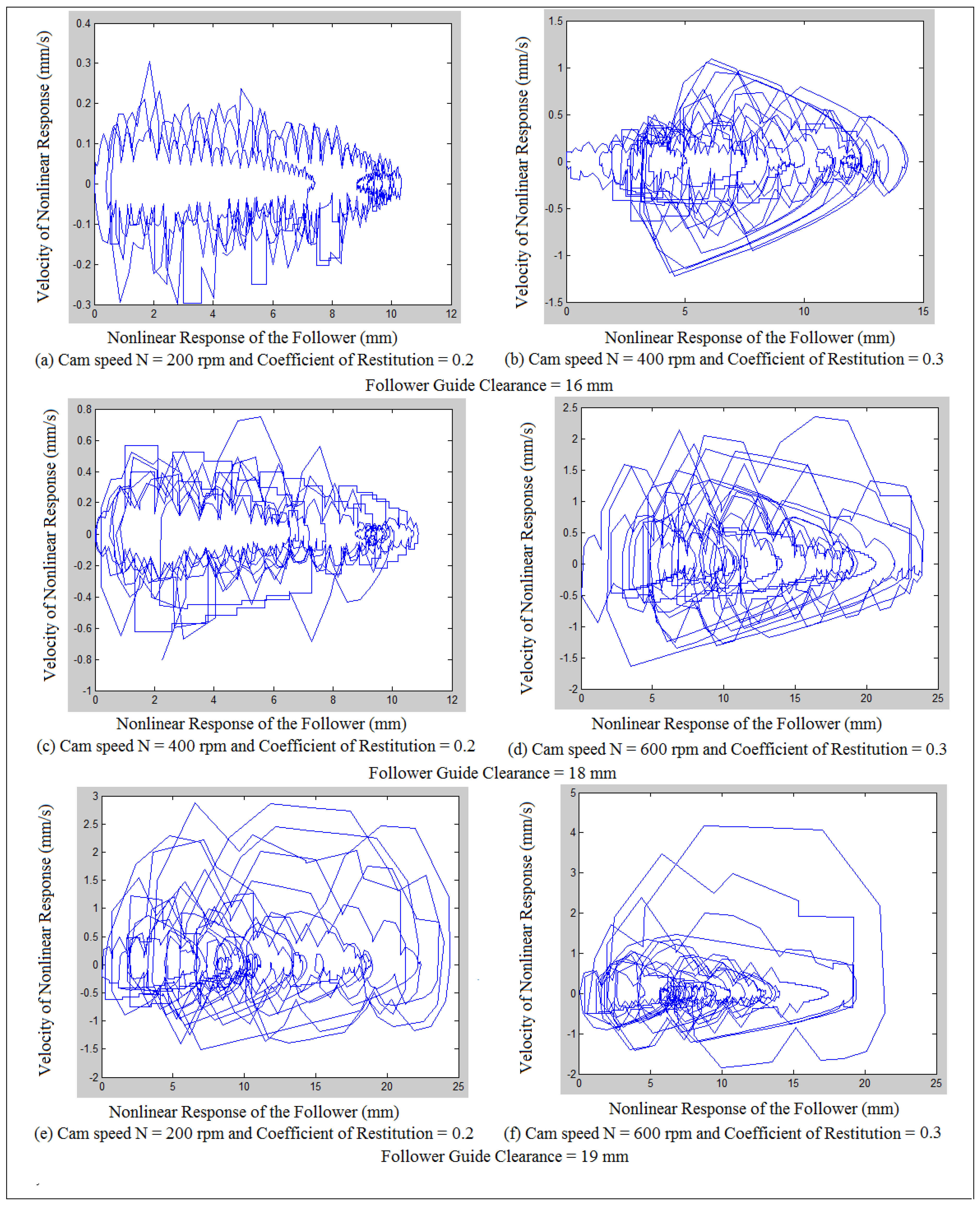
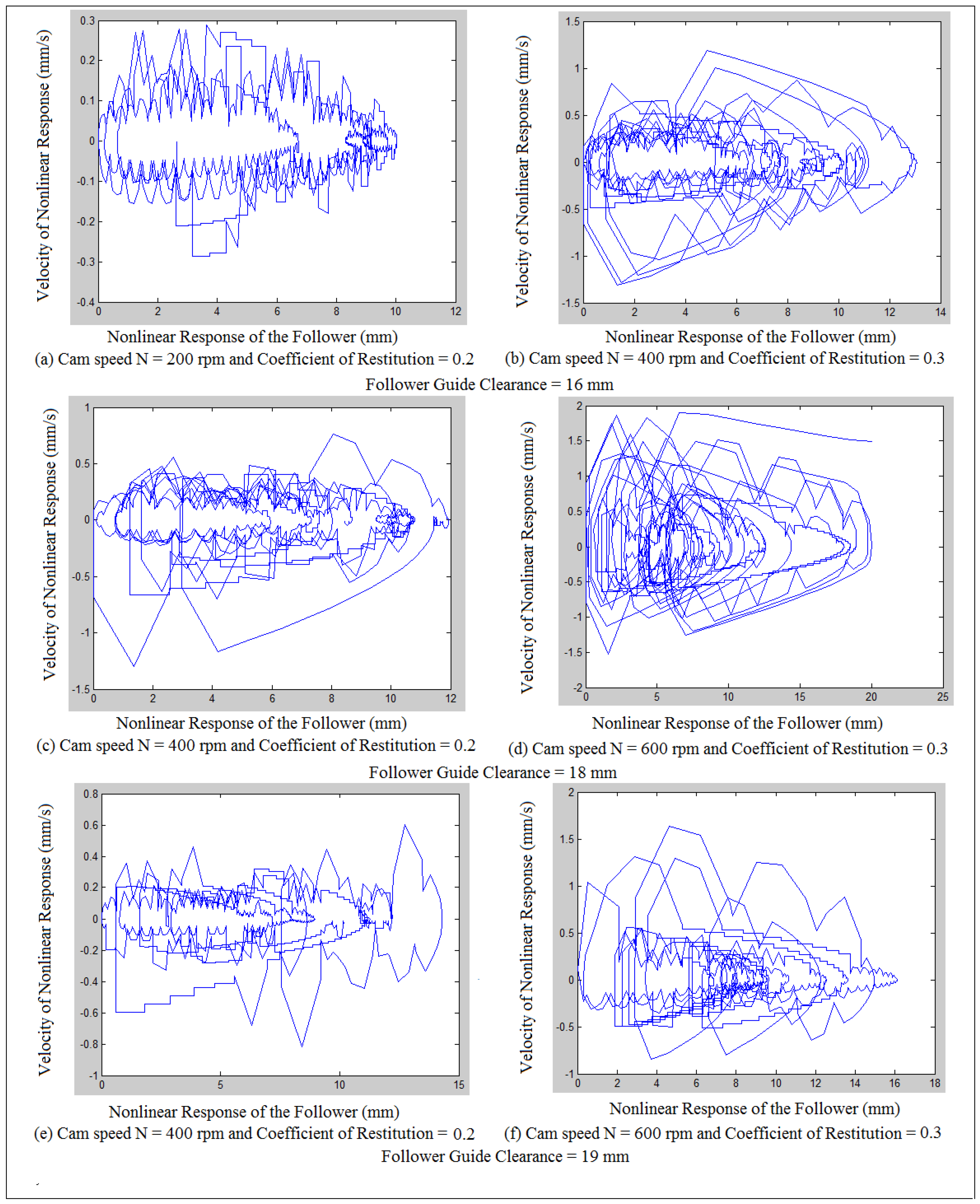
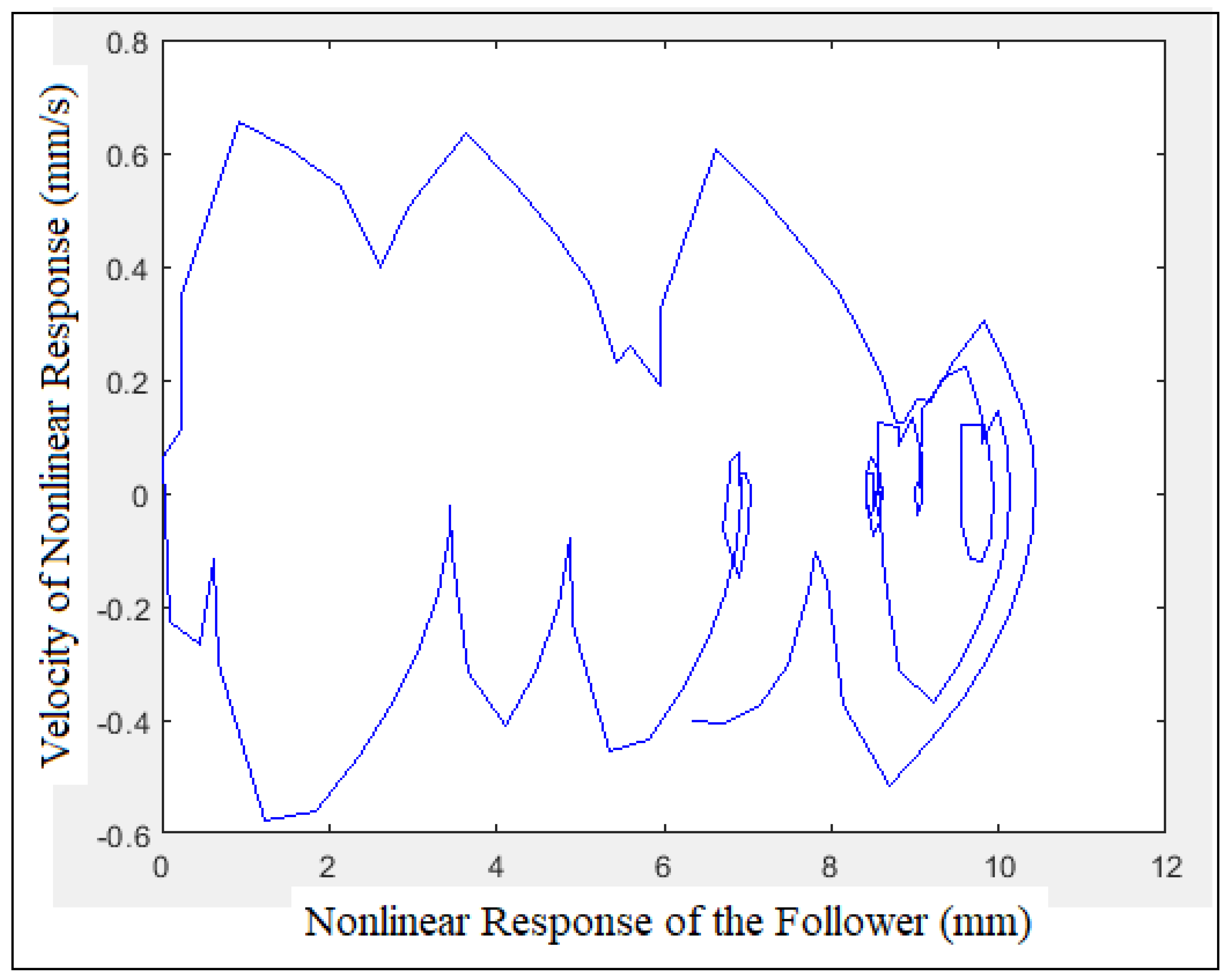
5. Detection of Chaotic Phenomenon Using a Phase-Plane Diagram
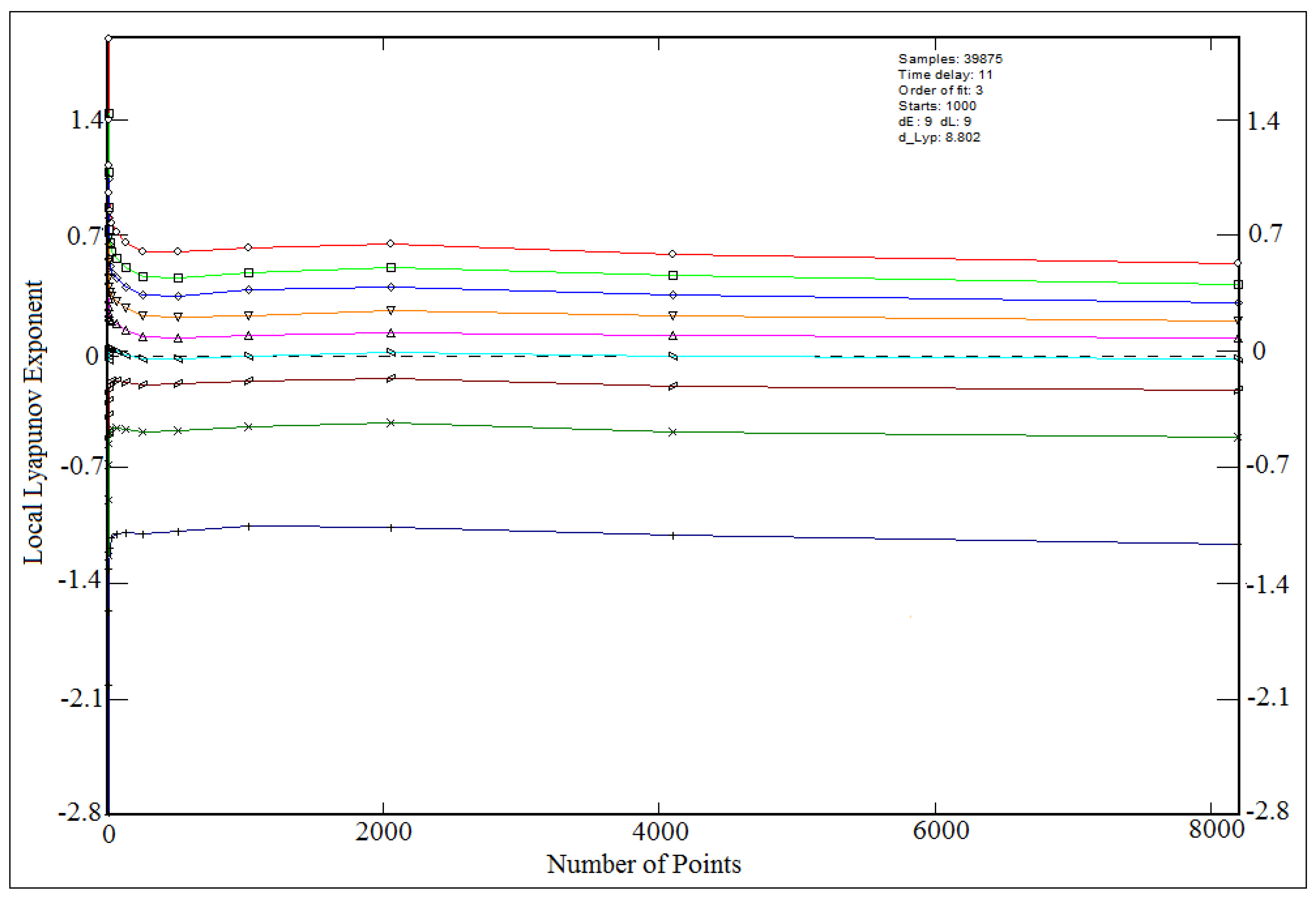
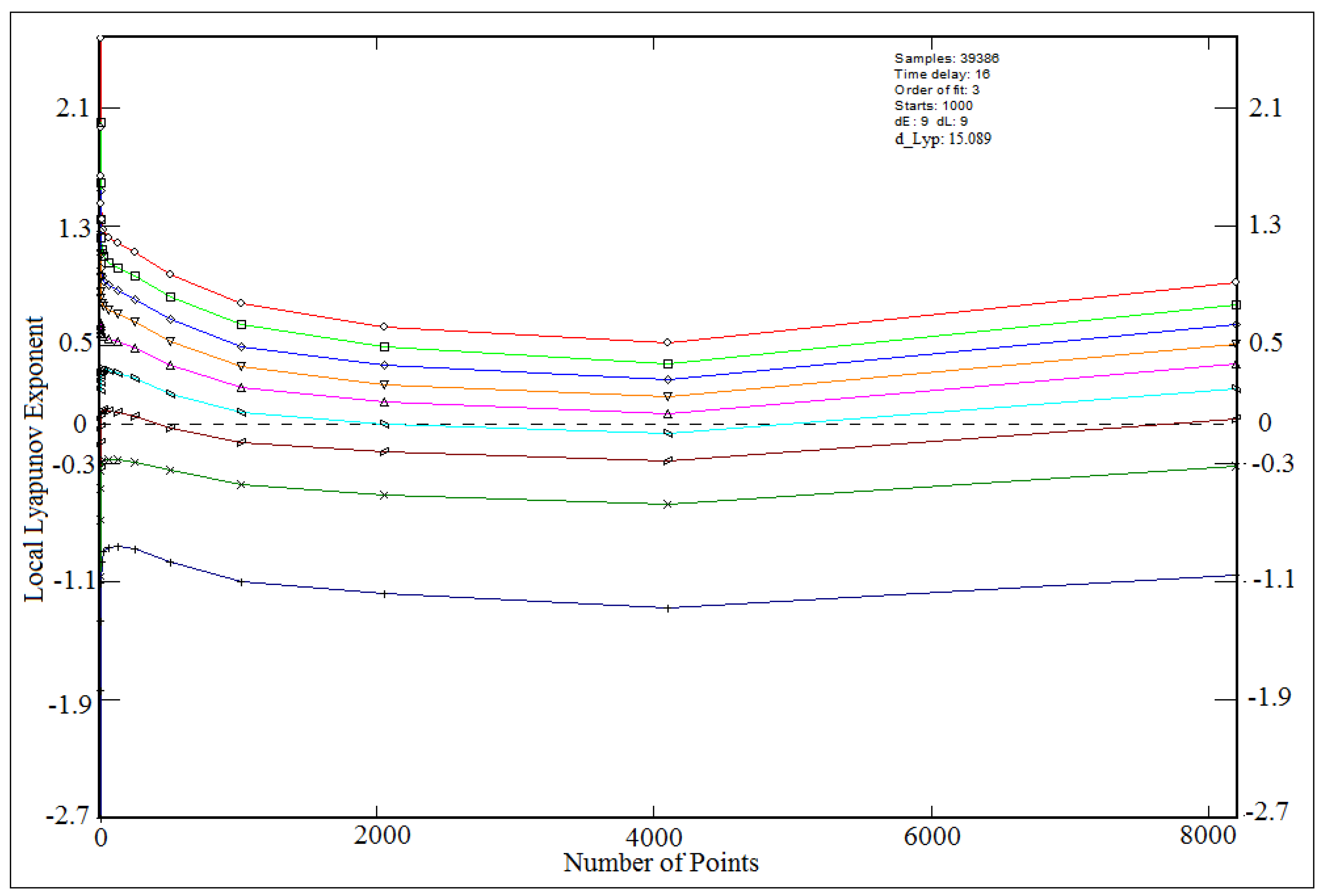
6. Detection of Chaotic Phenomena Using Lyapunov Exponent Conception
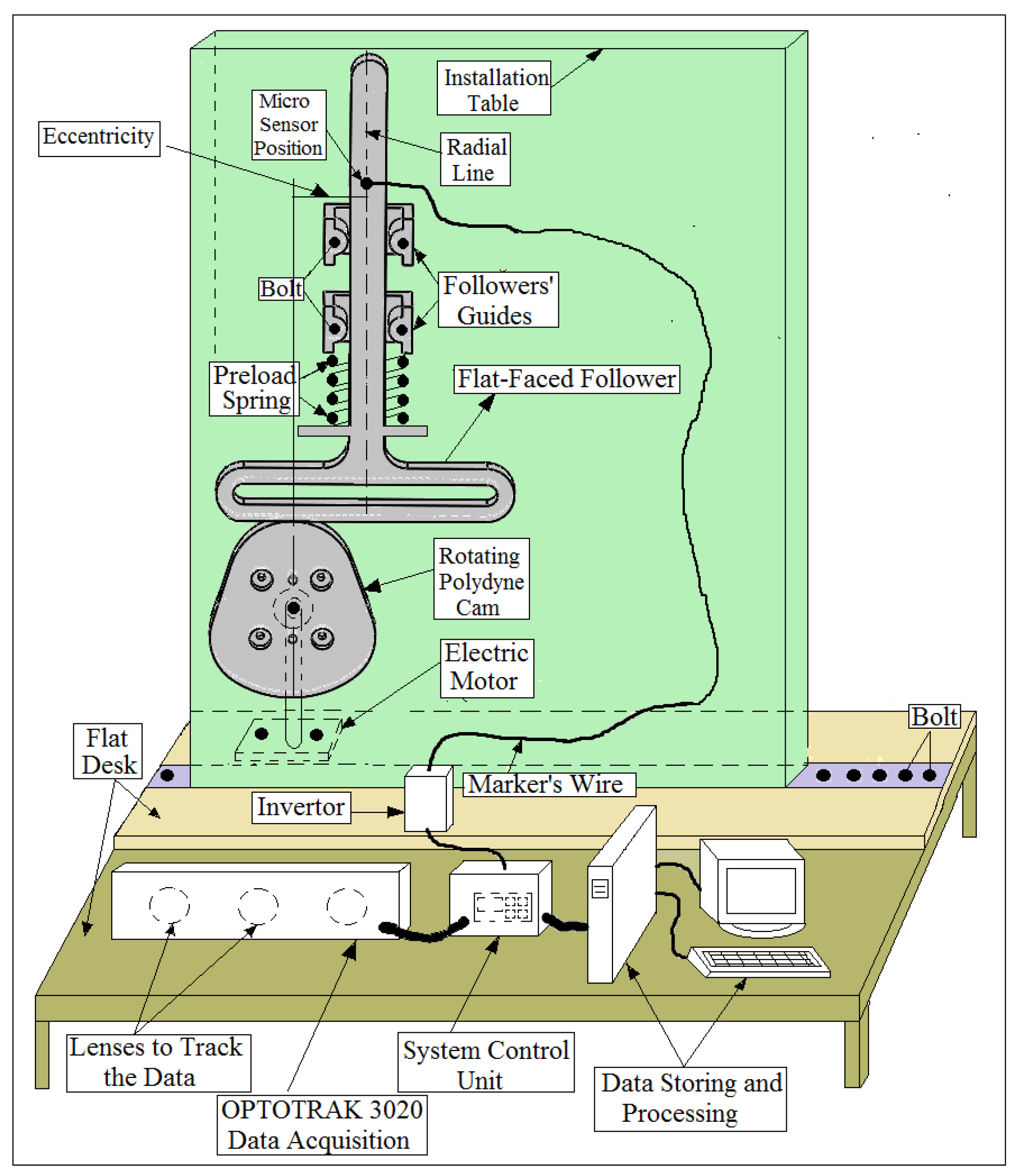
7. Experiment Setup
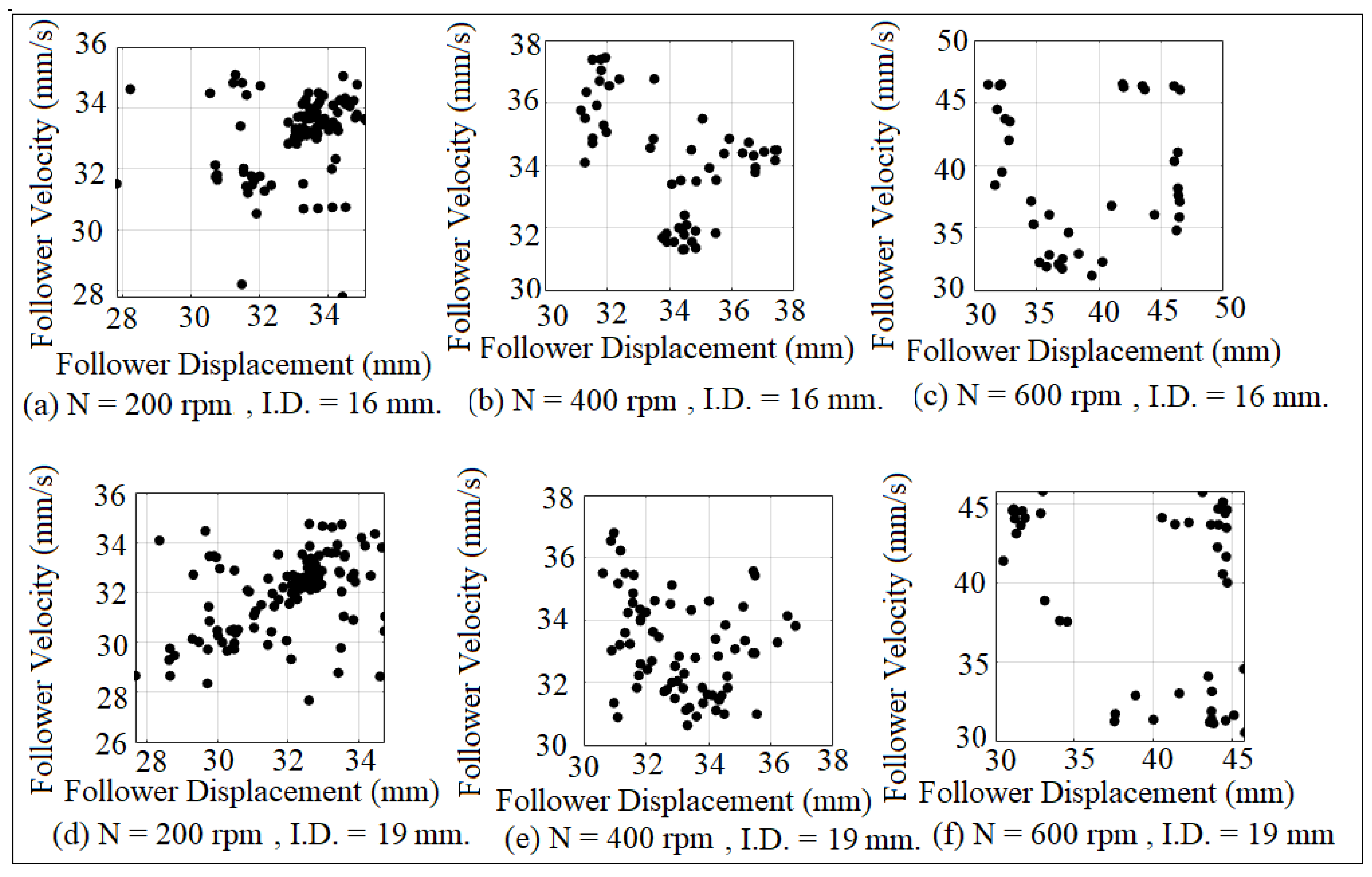
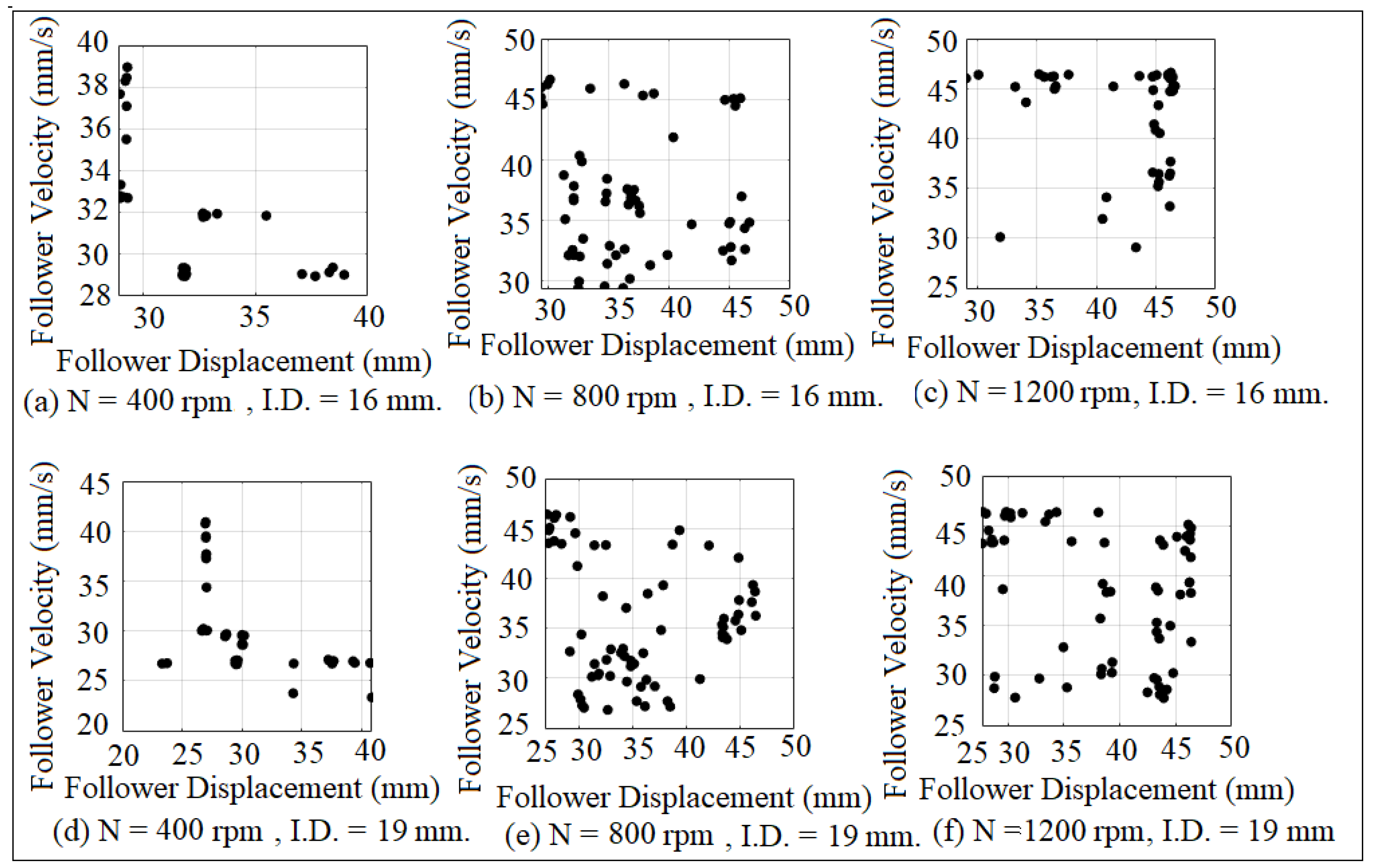
8. Chaotic Detection Using a Poincaré Map
9. Results and Discussions
10. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| O | Offset shift of the follower, mm. |
| m | Mass of the follower, Kg. |
| k | Spring stiffness which locates at the end of the follower stem, N/mm. |
| c | Viscous damping coefficient, N.s/mm. |
| k1 | Spring stiffness which locates between the follower and the installation table, N/mm. |
| x, | Linear displacement, velocity, and acceleration of the roller follower, mm, mm/s, mm/s2. |
| P | Preload including the weight of the follower or the force on the cam before the cam starts spinning, N. |
| F | Force exerted by the cam, N. |
| Ω | Constant speed of the cam, Rad/s. |
| ω | Natural frequency of the follower, Rad/s. |
| xH | Homogeneous solution of the follower displacement, mm. |
| xP | Particular solution of the follower displacement, mm. |
| xC | Solution of the follower displacement, mm. |
| D | Distance between trajectories. |
| d(t) | Percentage of variation in the distance between trajectories. |
| Distance between the pair () at nearest neighbors (i) of the trajectories. | |
| t | Time strides. |
| y(i) | Data of follower displacement after curve fitting. |
| Δt | Various time strides. |
| λ | Largest Lyapunov exponent parameter. |
References
- Yousuf, L.A. Contact stress distribution of a pear cam profile with roller follower mechanism. Chin. J. Mech. Eng. 2021, 34, 1–14. [Google Scholar] [CrossRef]
- Yousuf, L.A. Experimental and simulation investigation of nonlinear dynamics behavior of a polydyne cam and roller follower mechanism. J. Mech. Syst. Signal Process. 2019, 116, 293–309. [Google Scholar] [CrossRef]
- Yousuf, L.A.; Marghitu, D.B. Analytic and numerical results of a disc cam bending with a roller follower. J. Appl. Sci. 2020, 2, 1–15. [Google Scholar] [CrossRef]
- Yang, Y.F.; Lu, Y.; Jiang, T.D.; Lu, N. Modeling and nonlinear response of the cam-follower oblique impact system. Discret. Dyn. Nat. Soc. 2016, 2016, 6142501. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Du, Y. Interval of restitution coefficient for chattering in impact damper. J. Low Freq. Noise Vib. Act. Control 2021, 41, 432–450. [Google Scholar] [CrossRef]
- Yousuf, L.S. Detachment detection in cam follower system due to nonlinear dynamics phenomenon. Machines 2021, 9, 349. [Google Scholar] [CrossRef]
- Alzate, R.; Di Bernardo, M.; Montanaro, U.; Santini, S. Experimental and numerical verification of bifurcations and chaos in cam-follower impacting systems. Nonlinear Dyn. 2007, 50, 409–429. [Google Scholar] [CrossRef] [Green Version]
- Osorio, G.; di Bernardo, M.; Santini, S. Corner impact bifurcations: A novel class of discontinuity-induced bifurcations in cam-follower systems. SIAM J. Appl. Dyn. Syst. 2008, 7, 18–38. [Google Scholar] [CrossRef] [Green Version]
- Sundar, S.; Dreyer, J.T.; Singh, R. Rotational sliding contact dynamics in a non-linear cam-follower system as excited by a periodic motion. J. Sound Vib. 2013, 332, 4280–4295. [Google Scholar] [CrossRef]
- Sundar, S. Impact Damping and Friction in Non-Linear Mechanical Systems with Combined Rolling-Sliding Contact. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 2014. [Google Scholar]
- Rothbart, H.A. Cam Design Handbook; McGraw-Hill Education Publisher: New York, NY, USA, 2004. [Google Scholar]
- Chang, K.-H. Motion Simulation and Mechanism Design with SOLIDWORKS Motion 2021; SDC Publican: Mission, KS, USA, 2021. [Google Scholar]
- Liu, X.; Chen, W.; Shi, H. Improvement of Contact Force Calculation Model Considering Influence of Yield Strength on Coefficient of Restitution. Energies 2022, 15, 1041. [Google Scholar] [CrossRef]
- Yousuf, L.S.; Marghitu, D.B. Nonlinear dynamics of a two-cam system. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Virtual Conference, 1–5 November 2021; Volume 85628, p. V07BT07A009. [Google Scholar]
- Rodrigues-Licea, M.A.; Perez-Pinal, F.J.; Nuñez-Pérez, J.C.; Sandoval-Ibarra, Y. On the n-Dimensional Phase Portraits. Appl. Sci. 2019, 9, 872. [Google Scholar] [CrossRef] [Green Version]
- Yousuf, L.S. Non-periodic motion reduction in globoidal cam with roller follower mechanism. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 2022, 236, 2714–2727. [Google Scholar] [CrossRef]
- Terrier, P.; Reynard, F. Maximum lyapunov exponent revisited: Long-term attractor divergence of gait dynamics is highly sensitive to the noise structure of stride intervals. Gait Posture 2018, 66, 236–241. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hussain, V.S.; Spano, M.L.; Lockhart, T.E. Effect of data length on time delay and embedding dimension for calculating the lyapunov exponent in walking. J. R. Soc. Interface 2020, 17, 20200311. [Google Scholar] [CrossRef] [PubMed]
- Yousuf, L.S. Nonlinear dynamics phenomenon detection in a polydyne cam with an offset flat-faced follower mechanism using multi shocks absorbers systems. J. Appl. Eng. Sci. 2022, 9, 100086. [Google Scholar] [CrossRef]
























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yousuf, L.S. Effect of the Impact Coefficient of Restitution on the Nonlinear Dynamics Phenomenon of Flat-Faced Follower Mechanism with Clearance. Mathematics 2022, 10, 1922. https://doi.org/10.3390/math10111922
Yousuf LS. Effect of the Impact Coefficient of Restitution on the Nonlinear Dynamics Phenomenon of Flat-Faced Follower Mechanism with Clearance. Mathematics. 2022; 10(11):1922. https://doi.org/10.3390/math10111922
Chicago/Turabian StyleYousuf, Louay S. 2022. "Effect of the Impact Coefficient of Restitution on the Nonlinear Dynamics Phenomenon of Flat-Faced Follower Mechanism with Clearance" Mathematics 10, no. 11: 1922. https://doi.org/10.3390/math10111922
APA StyleYousuf, L. S. (2022). Effect of the Impact Coefficient of Restitution on the Nonlinear Dynamics Phenomenon of Flat-Faced Follower Mechanism with Clearance. Mathematics, 10(11), 1922. https://doi.org/10.3390/math10111922