1. Introduction
With the development of power electronics technology, induction motors (IM) due to their low pricing, minimal maintenance requirements, low moment of inertia, robust structure, low cost, and functional reliability have been widely employed in industrial applications. Several control approaches, including direct torque control (DTC) and field-oriented control (FOC) have been used to regulate the IM in high-performance systems. Lately, the FOC method has been widely applied to a variety of applications, including three-phase motor speed and position control. The FOC technique decouples the electromagnetic torque and the rotor flux control current commands for the IM, and therefore the machine is controlled like an independent excited direct current (DC) machine. Yet uncertainties—typically unanticipated parameter fluctuations, external load disturbances, and nonlinear dynamics—continue to have an impact on the IM’s controllability. The proportional integral (PI) regulator is one of the most broadly applied control methods in speed and current loops, but the parameter performance can be affected by the parametric variations and uncertainties [
1]. To address this problem, various advanced control methods have been proposed for regulating power electronics and drives fields, such as back-stepping control [
2,
3], neural control methods [
4,
5], H-infinity feedback control [
6], predictive control method [
7], adaptive control method [
8,
9,
10], and sliding mode control (SMC) [
11,
12].
SMC is a unique nonlinear regulation approach with a particularly dynamic performance for IM, such as high resilience, quick response, and easy implementation in theory and practice, among the aforementioned advanced techniques [
13,
14]. It should be emphasized that the undesired chattering problem in the motor is due to the discontinuous nature of the SMC, the control algorithm period, and the maximum power inverter switching frequency [
15]. Therefore, since the first SMC design for IM [
16], various IM controllers have been designed based on robust SMC theory to improve the results. For instance, in [
17,
18,
19], a regulator has been designed based on the backstepping control method and SMC. Moreover, in [
20], an adaptive fuzzy SMC based on the boundary layer approach is used to regulate the speed of IM. It is important to consider that using SMC in conjunction with other kinds of advanced control methods increases the regulator intricacy and computational cost, which is in contrast with the simplicity of SMC [
21]. Concerning chattering reduction, some authors have been taking advantage of higher-order SMC [
22,
23,
24]. However, this method requires higher-order real-time derivatives of the outputs.
Integral sliding mode control (ISMC) has been proposed by several authors to govern distinct sectors of IM to reduce chattering. An error, as well as its integral signal, are required by the standard ISMC surface. In [
25], the authors have employed the integral sliding mode technique to design an observer to be utilized as the prediction model in the algorithm of predictive current control of the IM. In [
26], the integral sliding mode method is applied for the purpose of observer design while the stator currents are being regulated with sliding mode control. Moreover, in [
27,
28], the authors presented an ISMC approach for starting speed sensorless controlled IM in the rotating situation. Furthermore, in [
21], the authors suggested an ISMC anti-windup in the mechanical regulation loop of the IM. Moreover, in [
12,
22], a speed regulator has been designed based on the ISMC method while the stator currents are being regulated by PI controllers. However, due to the non-linearity of the IM, a well-designed nonlinear regulator can enhance the performance of the machine when there are disturbances and uncertainty. In [
28], a velocity observer based on the ISMC technique for IM has been proposed, where stator current controllers are regulated through PI controllers combining with ISMC controllers, which means more cost and nesting in the system.
It can be seen that the aforementioned papers mainly are using the ISMC method for the speed loop of the motor. However, in this paper the ISMC method is used to regulate the stator current of the IM.
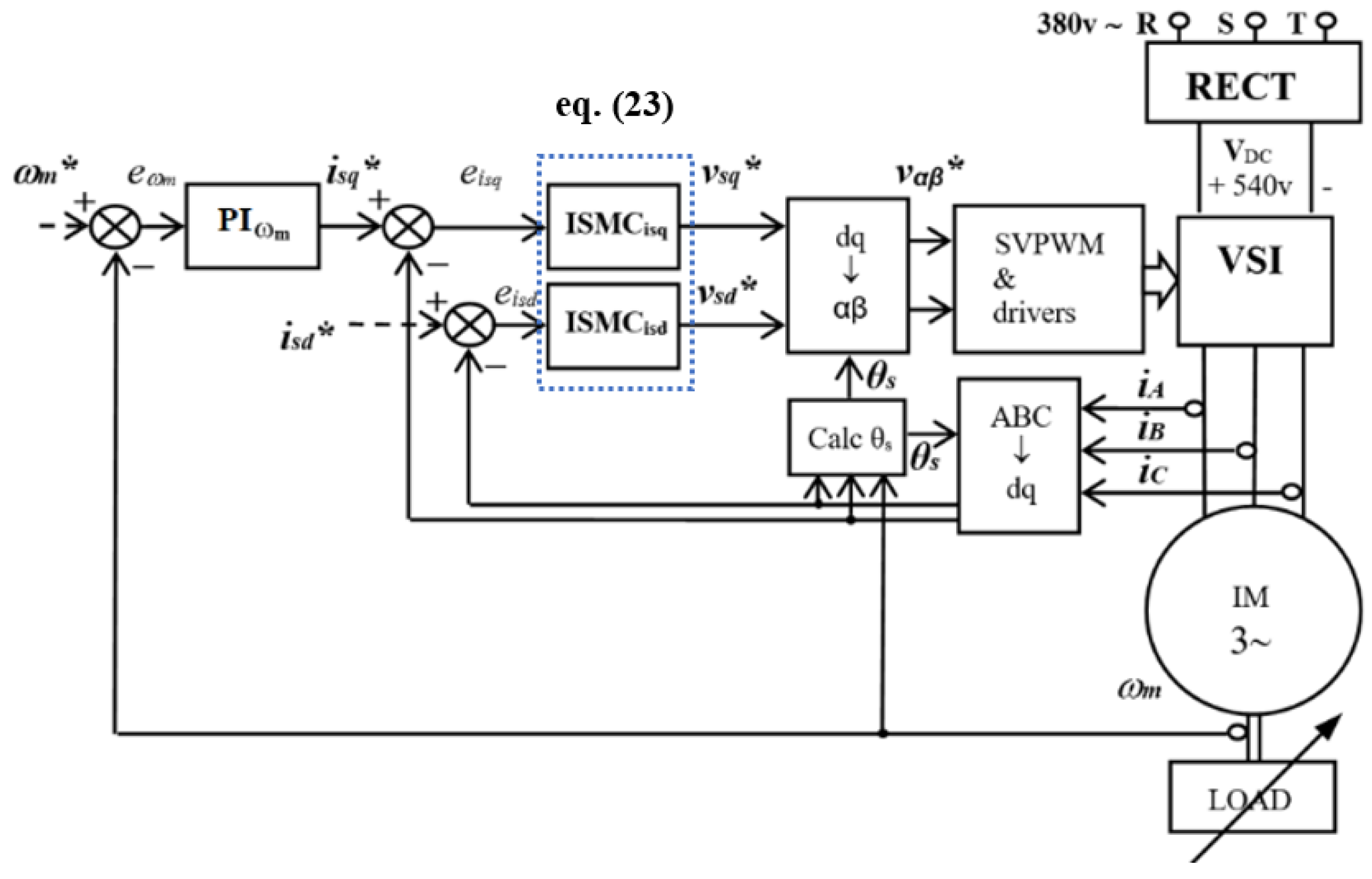
The presented paper proposes a robust ISMC method to regulate the decoupled current components of IM. The main aim is to achieve asymptotic current tracking despite the presence of the current coupling disturbance terms and parametric uncertainties. The controllers are designed in the d-q synchronous reference frame for the direct stator current (), and quadrature stator current (). Two different control laws are proposed in this regard. First, the stator currents are regulated by using the conventional ISMC (identified as D1). As for the second design, the function of the errors of the current have been integrated in the surface design process. By employing this function, the control action is smoother and offers a faster dynamic (identified as D2). Then, by using a Lyapunov method, the stability of the stator decoupled currents is guaranteed. Furthermore, because there is an accurate control over stator current of rotor flux, the rotor flux weakening method is applied for running the induction motor over the rated speed in a constant DC-link voltage condition. Finally, a parametric uncertainty analysis of IM has been done to seal the robustness of the proposed controller. Most of the studies are only based on simulation results or, in the case of using a real-time control platform, they are usually employing a very low power IM (less than 1 kW) to carry out the experiments. By contrast, in this proposal the experimental validations have been done by using a -kW commercial IM, which demonstrates that the obtained experimental results can be easily extended to real industrial applications. The simulation and experimental results show that the proposed approach offers good robustness under parametric uncertainties and stator current coupling disturbances.
The paper is prepared as follow: the IM model and problem formulation is explained in
Section 2. In
Section 3, the robust decoupled ISMC current regulators are designed.
Section 4 contains simulation and experimental results. We discuss results in
Section 5. Finally, in
Section 5, the conclusion is presented.
4. Simulation and Experimental Results
In this section, the performance of the proposed current regulations has been verified in the MATLAB/Simulink environment and in the real tests by using a commercial induction motor.
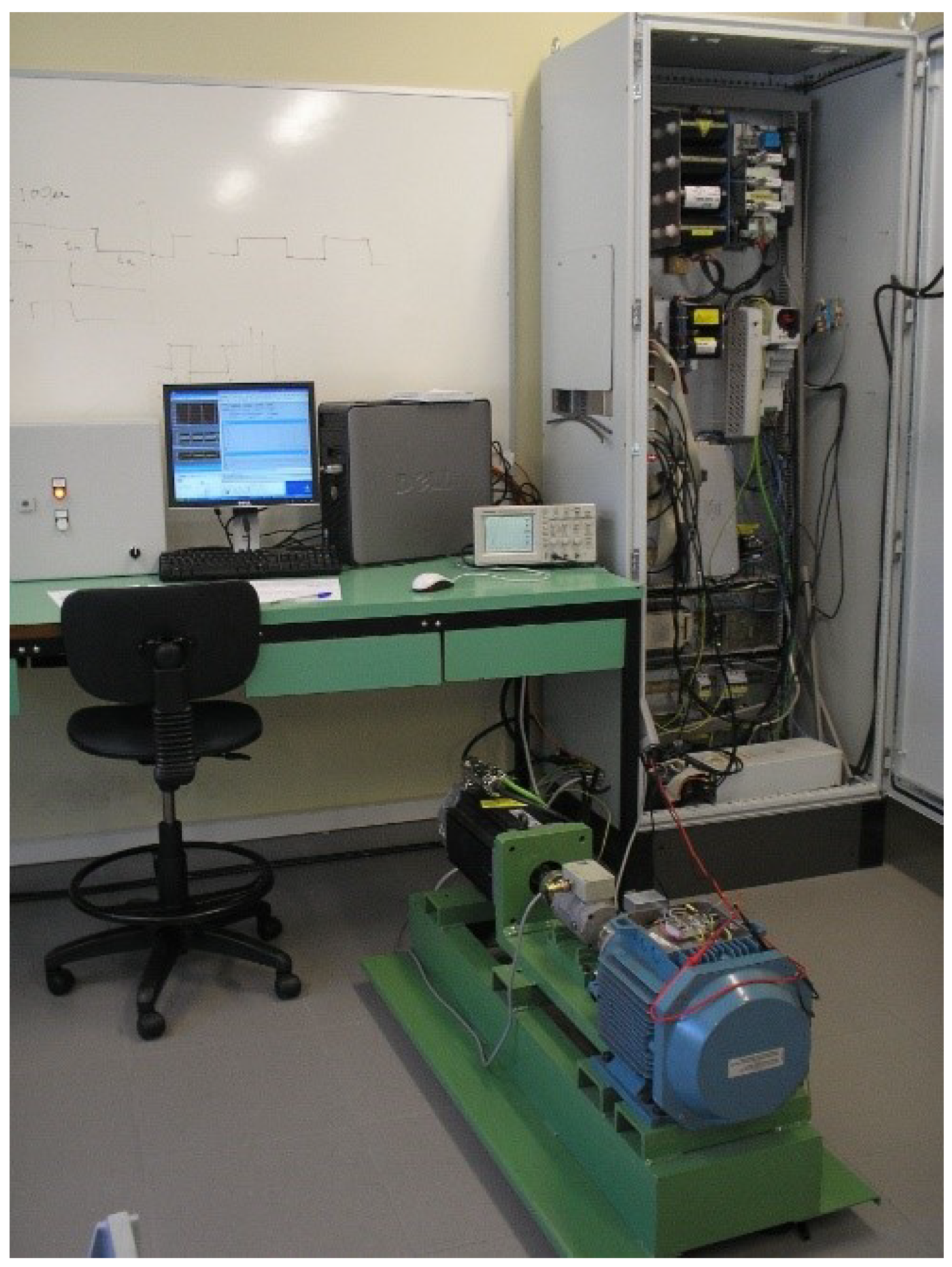
The experimental validation of the proposed ISMC regulators has been carried out by using the control platform shown in
Figure 3 and
Figure 4.
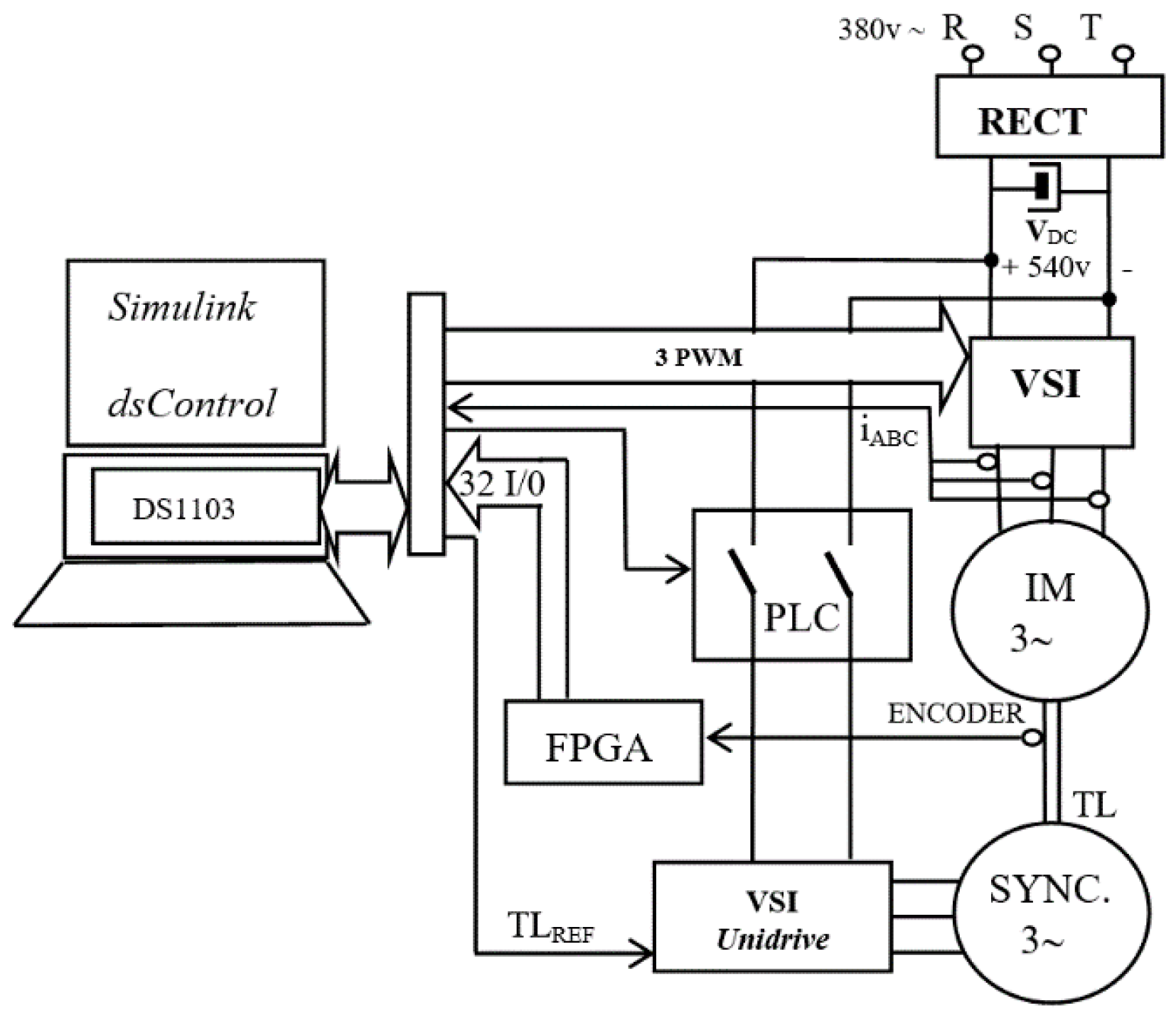
The design block consists of a personal computer with the Windows XP operating system where MATLAB/Simulink from MathWorks, dSControl from dSPACE, and the real-time interface from dSpace are installed. This interface allows the user to run in real-time the designs that are made in Simulink through MATLAB’s Real-Time Workshop.
The card is a powerful real-time interface that is connected in a portable slot of the PC and has a from Motorola at 1 GHz, a DSP that allows generating SVPWM in a very simple way, as well as 32 I/O pins, 8 D/A channels and 4 A/D channels, among the most important resources. The dSControl software, which connects to the board, is used to monitor on the PC the different signals and variables of the real tests that are executed on the motor platform. Thus, these signals can be compared with their counterparts obtained in Simulink and perform the appropriate validations.
The power block is composed of a DC bus, the inverters to control the two motors, and the bank composed of the two motors. The 540-V DC bus is obtained from a 380 V/50 Hz three-phase grid, by means of a semi-controlled rectifier and a 27-mF capacitor bank. The inverter for the induction motor is a 50-A industrial three-phase IGBT bridge, and the synchronous motor is an Emerson Unidrive programmable inverter. The IGBT bridge is used as a three-phase inverter to power the stator of the induction motor, which is controlled with the functions of the Simulink SVPWM library for . On the other hand, the synchronous motor has its own Unidrive inverter, which is torque controlled with a DC voltage set-point proportional to the torque to be generated, and which is sent from the .
As for the motor platform, it consists of a -kW three-phase induction motor from , on whose shaft is connected to a -kW Unimotor synchronous motor from Emerson, which is used to produce the load torque on the induction motor.
The control and monitoring tasks are done from a personal computer, which has installed the software MATLAB/Simulink and dSControl, and the controller board real-time interface of dSpace.
The mechanical speed of the machine is calculated by an FPGA module by using the measurements of an incremental encoder of 4096 impulses per revolution. The PLC is used to ensure that the basic operations as the charge of the DC bus, are done safely. The algorithms for the speed and currents control, the flux and torque estimators, the angle calculation, Park’s reference frame transformations, and the calculations of SVPWM, have been implemented by using a S-Function Builder Simulink’s block programmed in C language, providing a portable compact code for different processors. The stator windings of IM have been protected by limiting the electromagnetic torque current command to ±20 A. The nominal value of the rotor flux (0.903 Wb) is obtained by keeping the rotor flux current command value at the constant value, 8.026 A.
Table 1 shows the values of the ISMC current regulators’ parameters for three distinct design scenarios applied to the same induction motor. The nominal parameter values (
Table 2) are used by the IM in the both ISMC regulators, D1 and D2 designs, while these controllers are tuned by using the T1 and T2 are shown in the second and third columns. In the fourth column, with the T3 tuning, the Ls factor of the motor changes, whereas the rest of the machine specs will remain as before.
Regarding the adjustment of the PI current regulators, which are going to be employed to compare with the ISMC current regulators, in both stator currents loop a 3000 rad/s bandwidth and a margin phase of
have been used to adjust the PI regulators as (
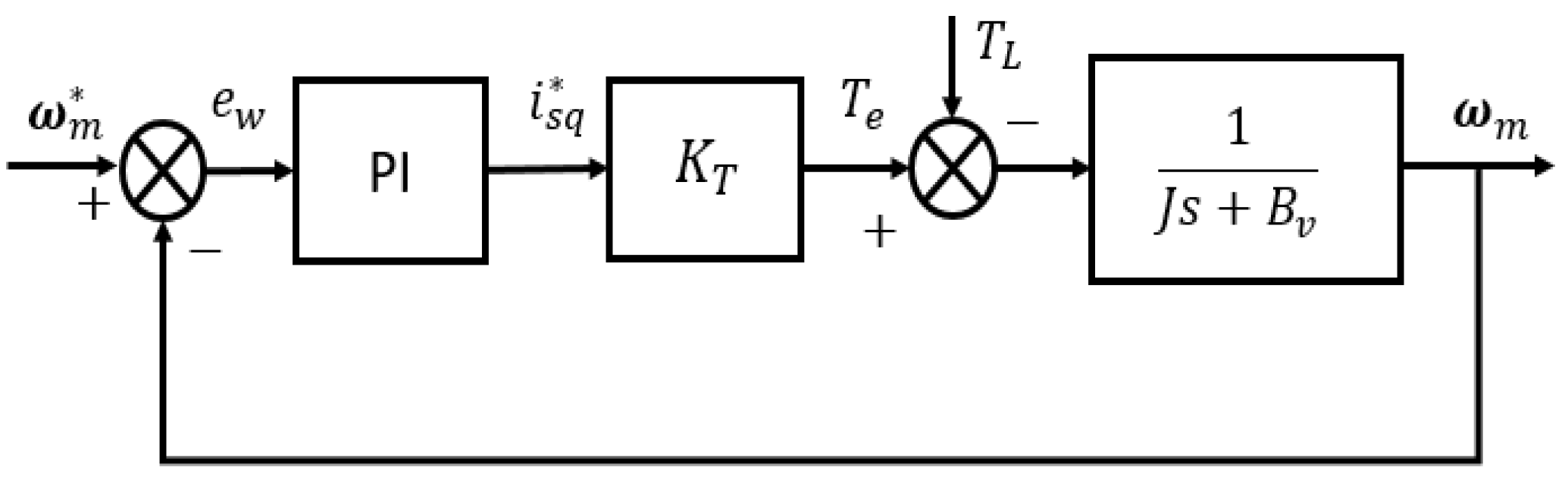
). In this sense, as the mechanical speed loop is slower than the stator current loops, the bandwidth of the PI speed regulator is chosen to be ten times smaller than the current regulator. The PI regulator has been tuned, taking a bandwidth of 300 rad/s and a margin phase of
, (
and
) [
29]. This way the fastest possible dynamics have been obtained for IM experimentally by applying PI regulators.
By using D2 design and T3 adjustment (D2-T3), another experiment is done which considers
term of the IM is
lower than the rated value (
Table 2):
(with
), to demonstrate the robustness despite the parametric uncertainties of the machine.
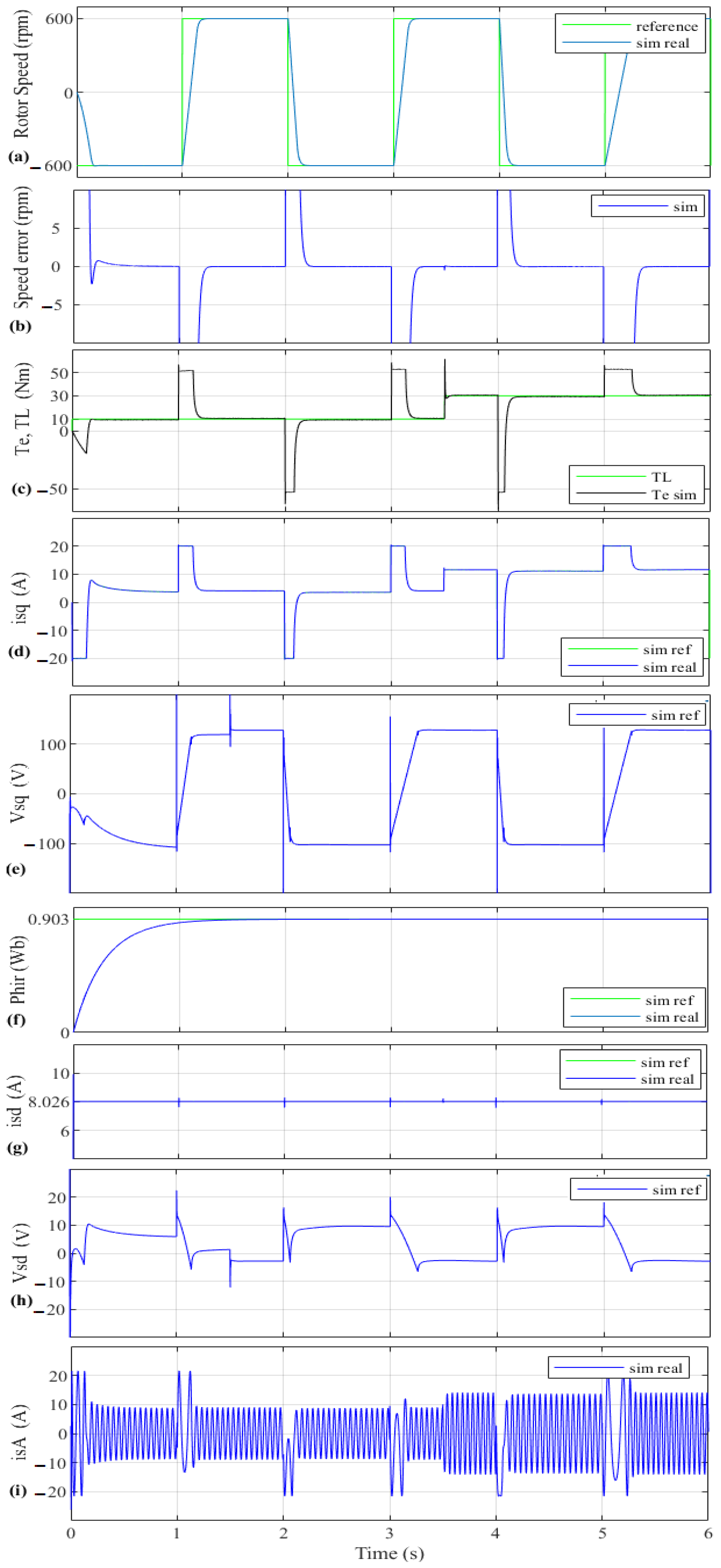
Figure 5 shows the machine’s performance when the simulation is running at 600 rpm of speed. The motor works with a square speed reference of 2 s period, and the load torque is applied to the system in two steps: 10 Nm at the starting point, plus 20 Nm after
s. Moreover, the experiment is carried out by applying D2 to the platform and tuning the controllers by using T1 tuning values. The first graph (a) depicts the reference and real rotor velocity, and the second graph (b), demonstrates the speed error.
As can be seen, by a sudden change of the load torque, the rotor velocity tracks the speed reference properly, with less than 1 rpm error in steady state. This precise speed tracking is happening due to the good adjustment of the PI speed controller. The third graph (c), shows the electromagnetic torque and load torque, in which the smoothness of the electromagnetic torque is noticeable. In graph (d), it can be seen that the real torque current follows its reference properly, meaning that its error is minimum. Moreover, this current is limited to its maximum value (20 A), and it is proportional to the electromagnetic torque, which consequently is also smooth. The good quality of and is due to the fact that the output voltage of the regulator is also smooth and effective, which is obvious in the graph (e). In the (f) graph, it can be seen that rotor flux reaches and keeps its nominal value after s, and this is possible due to the precise rotor flux current tracking, as has been shown in the (g) graph. This is a consequence due to the output voltage of regulator. The efficiency of this signal is illustrated in the (h) graph. It can be observed that these two stator currents are decoupled. Finally, in graph (i), it can be observed that the stator currents are limited to the same value to which the torque current is bound.
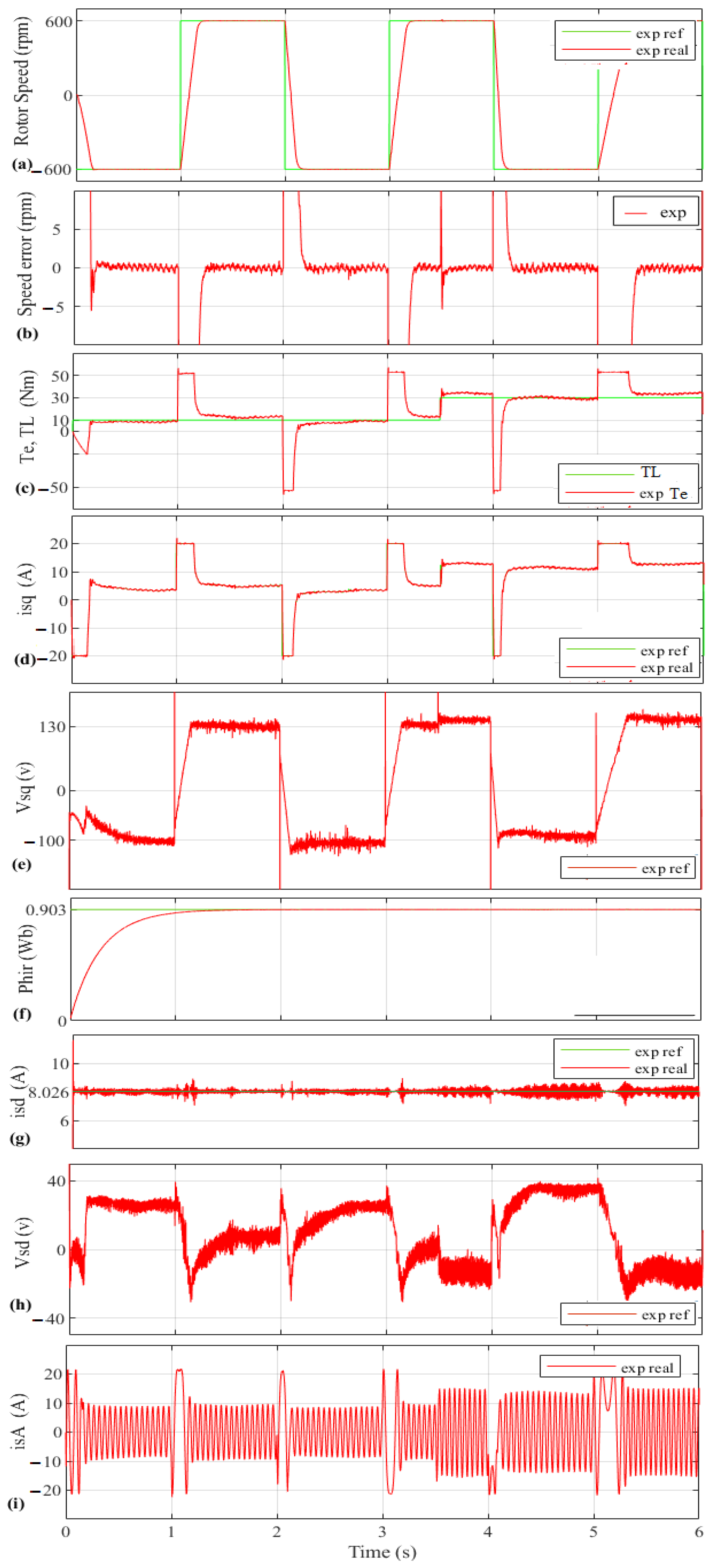
Figure 6 depicts the machine performance by using the experimental test that corresponds to the simulation test presented in
Figure 5. The speed tracking and accuracy are quite close to the simulation example, and it has fast dynamics, as shown in graphs (a) and (b). In steady state, speed error is less than 1 rpm, implying good accuracy in the presence of load disturbance. By comparing the electromagnetic torque (c) its simulation scenario, it is noticeable that both are fairly comparable, smooth, and efficient. Graph (d) shows that the torque current tracking is occurring precisely, and it is very similar to the simulation case, which is obtained due to the smooth and effective output voltage of its regulator, (e) graph. It has been demonstrated that the rotor flux (f), its related current (g), and the regulator’s output voltage (h) are very similar to their respective simulation ones. Finally, one phase of the stator currents is shown in graph (i). It is worth noting that the experimental voltages (
) and currents (
) have higher control action than the simulation case due to the unmodeled dynamics of the plant.
When comparing
Figure 5 and
Figure 6, it can be noted that the simulation and the experiment platform have almost identical behavior, indicating that the enhanced D2 design of ISMC stator currents regulators have been experimentally validated and have proper system modeling. An error and its integral signal are used in the conventional D1 design of ISMC technique to design the surface. Enhanced D2 design, on the other hand, uses the
method to enhance the sliding surface (Equation (
15)). In addition, to decrease chattering, the conventional D1 design ISMC’s
function is substituted with one of its continuous approximation functions, such as
(Equation (
23)).
5. Results Discussion
In this section, the capability of the proposed controller in comparison with two other control techniques, PI controller, and conventional ISMC, is demonstrated experimentally.
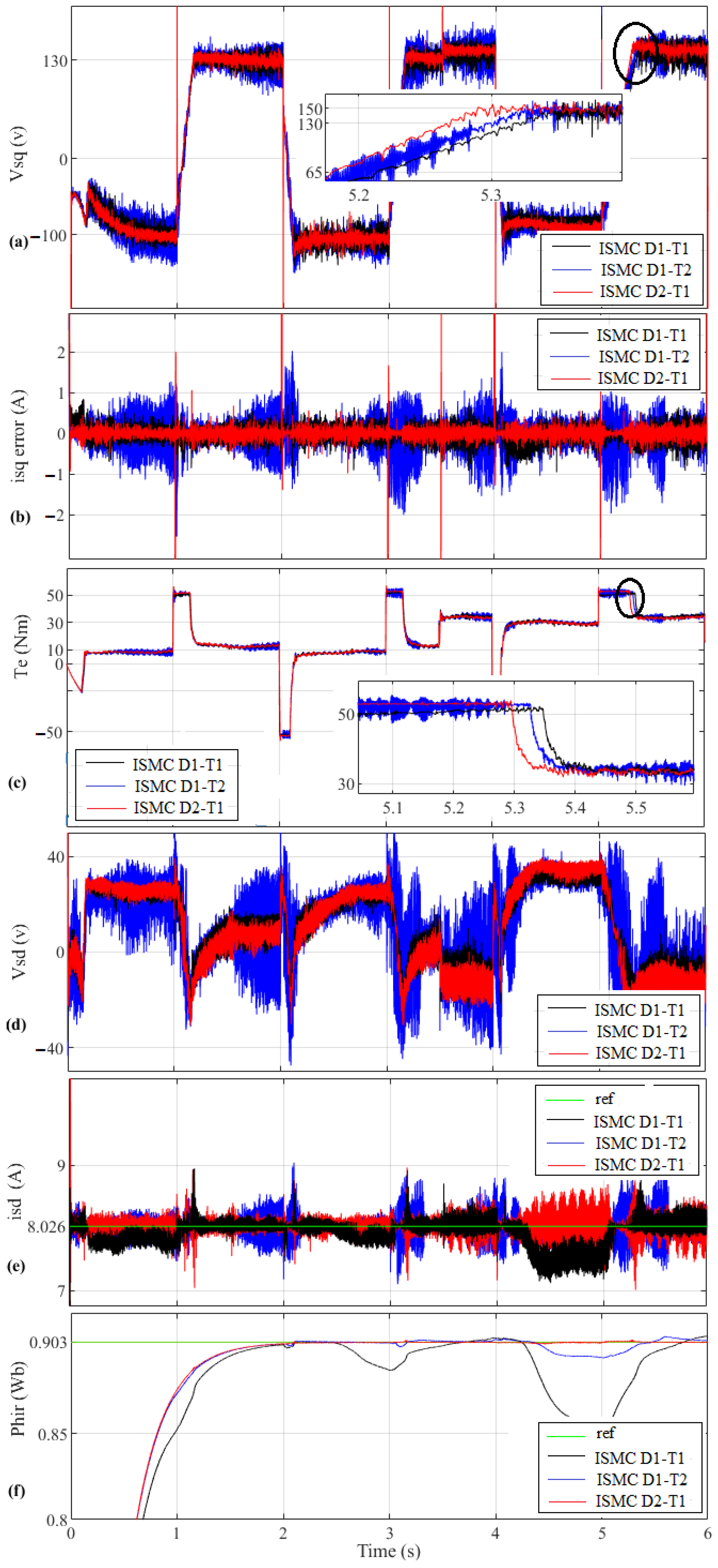
In this regard,
Figure 7 shows a comparison of the D1 (conventional method) and D2 (proposed method) controllers. These tests have the same speed and load conditions as
Figure 6. For extracting
Figure 6, experiments have been done in three stages: first, T1 tuning is considered for D1 (D1-T1). Moreover, D2 is tuned by using T1 tuning (D2-T1). Finally, to have a better tune for D1 in order to get best dynamics of the whole system, T2 values are taken (D1-T2). The enhanced controller’s
current regulator output (
), which is quicker and smoother than the two conventional versions, is shown in graph (a). The outcome of the D1-T1, is slower, more aggressive, and has a higher current error (b) than the D2-T1 case. As a consequence, the electromagnetic torque of the D1-T1 is slower and more aggressive than the D2-T1 case. By applying the D1-T2, the output of the controller is faster but more aggressive than the D1-T1, but still slower than the D2-T1. As a result, its electromagnetic torque is faster and more aggressive than the D1-T1 gains, generating chattering and slower than the D2-T1, graph (c).
On the other hand, graph (d) shows the comparison between current regulator output () for both conventional and enhanced methods. As can be observed, D1-T1 causes the machine to lose control at some instances (graphs (e) and (f)). The conventional technique requires the use of T2 design values in this circumstance. The output of the conventional current regulator () has a certain amount of fluctuation, as can be seen in the (d) graph, but the enhanced controller still gives a superior signal for and flux ((e) and (f) graphs).
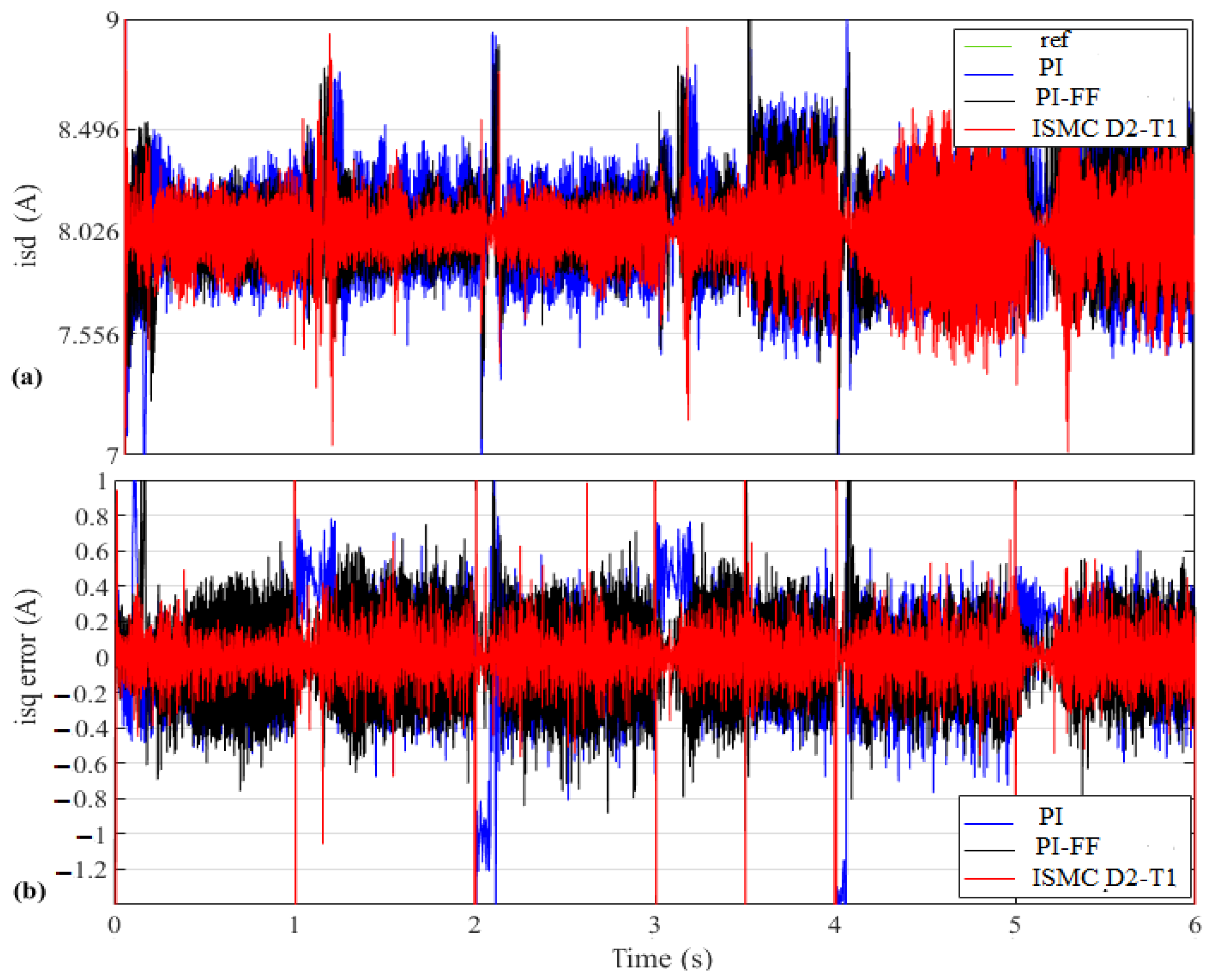
The graphs of
Figure 8 and
Figure 9 show the comparison of the experimental tests between the enhanced ISMC (D2-T1) and the PI current regulators by using the same speed and load conditions as in the test of
Figure 5. For running these experiments, once the PI controllers have been adjusted without considering
and
coupling terms of currents (Feed-Forward, FF) action and once by considering FF action, which means PI regulators are running at their best adjustment condition. As has been shown in the (a) graph of
Figure 8, the
response is slightly smoother by using the enhanced ISMC D2 regulator in comparison to two PI controllers. Moreover, the
error can be observed in the (b) graph indicates that by using the PI controller without FF, the motor is losing control at some instants (1 s, 2 s, 3 s).
Furthermore, by applying the ISMC regulator, the error bound is notoriously lower compared to the case in which the motor is running by PI stator current controllers. Hence, the performance of the presented regulator is better than PI.
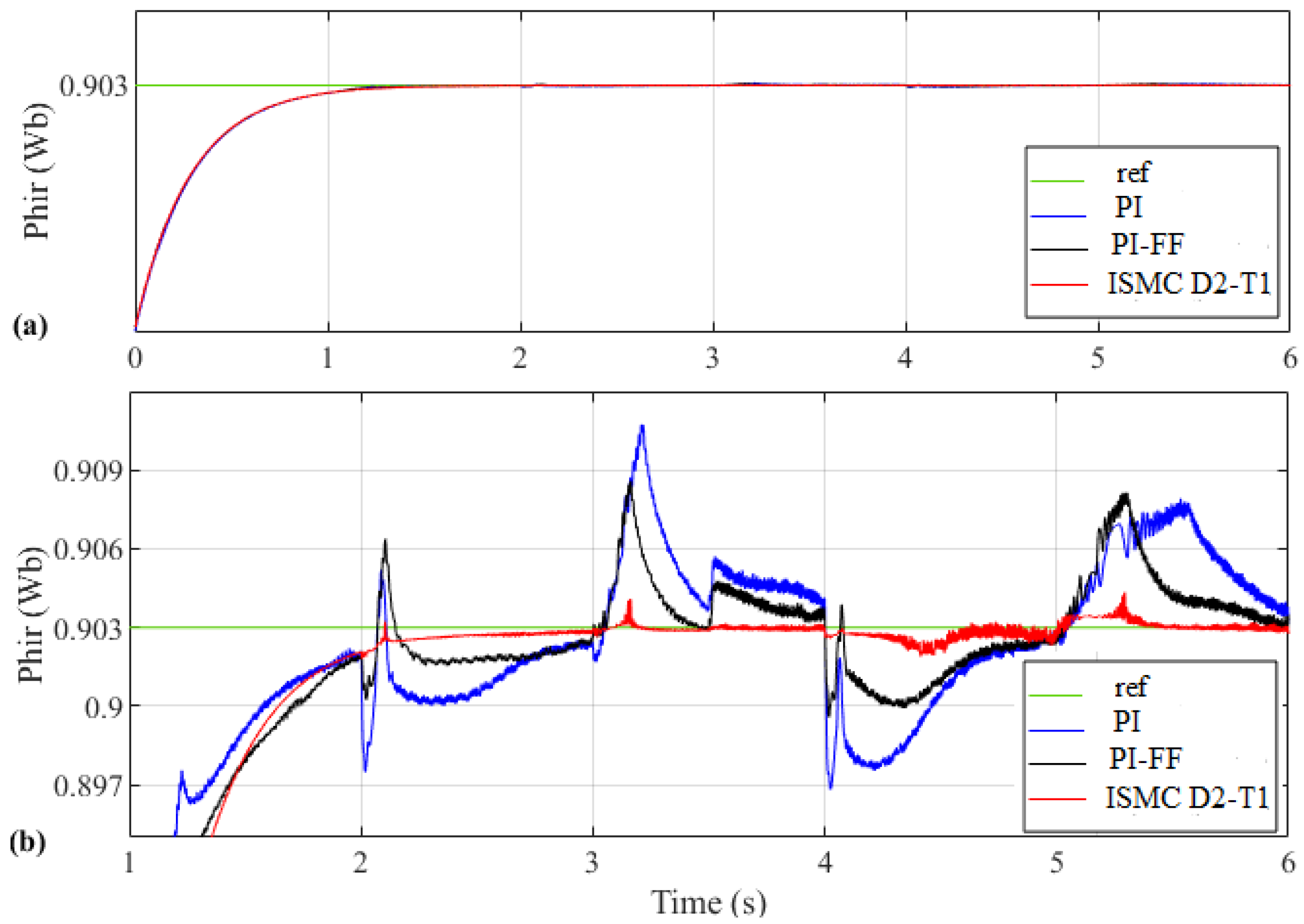
Experiments for flux performance comparison between the enhanced ISMC D2 and the PI regulators are shown in
Figure 9. The ISMC regulator is correcting the effect of the current coupling terms in graph (b). As a consequence, it is getting good control over the rotor flux, whereas by using the PI regulator, the compensation is worse and the rotor flux control is not so good (losing the flux tracking at the 1 s, 2 s, 3 s, 4 s, and 5 s instants). This performance leads us to take advantage of the flux-weakening regimen, which demands high precision in the rotor flux.
The outcomes of the experimental comparisons between the proposed method and the existing ones are provided in
Table 3.
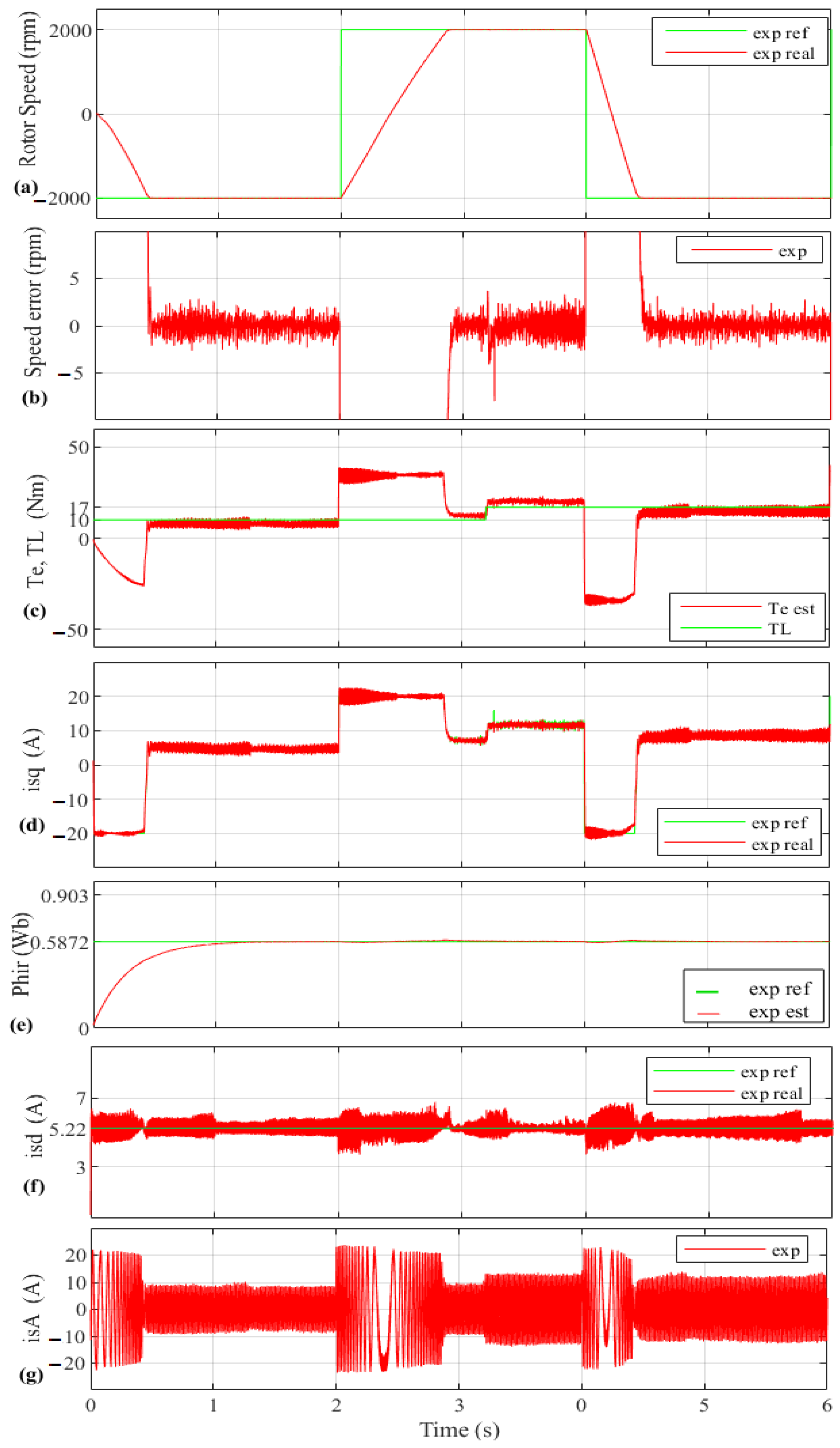
Figure 10 shows the experimental test in which the maximum value of the reference speed is 2000 rpm, which is higher than the rated value of the motor (1445 rpm,
Table 2), whereas the rotor flux is lower than the rated value. This way, the machine works in a rotor flux-weakening regimen. In this experiment, the following load disturbance is applied to the regulated motor by enhanced ISMC D2 design:
= 10 Nm at
t = 0 s, and 7 Nm after
s is added to the initial value. It can be seen that speed tracking (a) is extremely good, with an outstanding accuracy of 3 rpm of error steady-state (b). The electromagnetic torque is smooth and effective (c), with no chattering, beccause the torque current tracking is excellent (d). The rotor flux for this regimen achieves and maintains a tight, constant value of 0.5872 Wb, as shown in graph (e). This is made feasible by a precise rotor flux regulation (f), which keeps the actual current at the same level as its reference, 5.22 A. Finally, the (g) graph shows the A stator current, which shows that the three-phase currents are limited to approximately 20 A to protect the stator winding from over-currents.
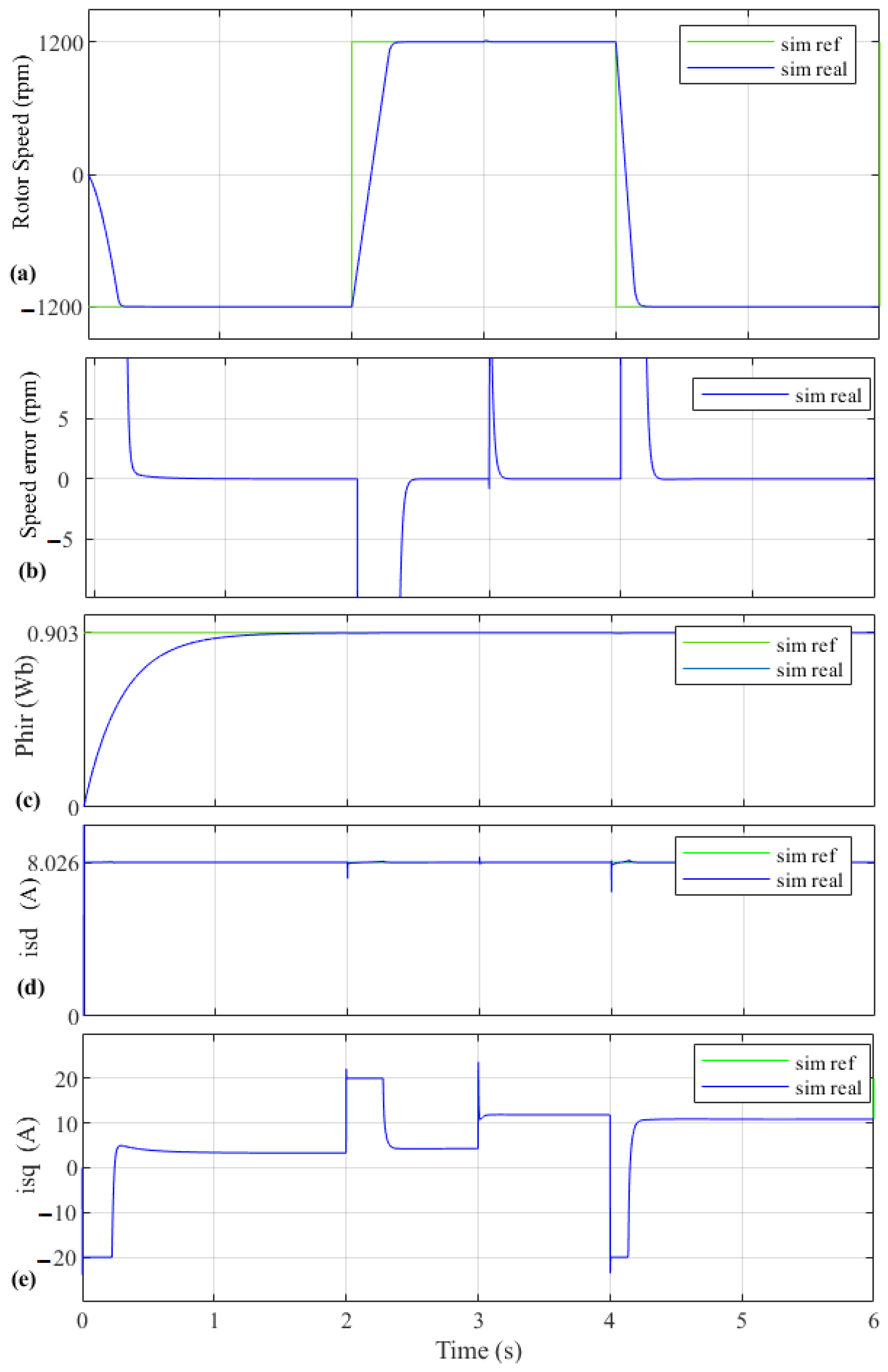
Figure 11 shows the simulation performance of the machine by using enhanced ISMC D2 design with T3 tuning, which employs a theoretical machine with a lower
factor (by taking a lower
). The machine has been tested by employing a medium-high speed test (1200 rpm), and it can be observed that speed tracking, graphs (a) and (b), and also the rotor flux tracking, graph (c), are excellent. Moreover, both tracking of stator currents are also good, as seen in graphs (d) and (e).
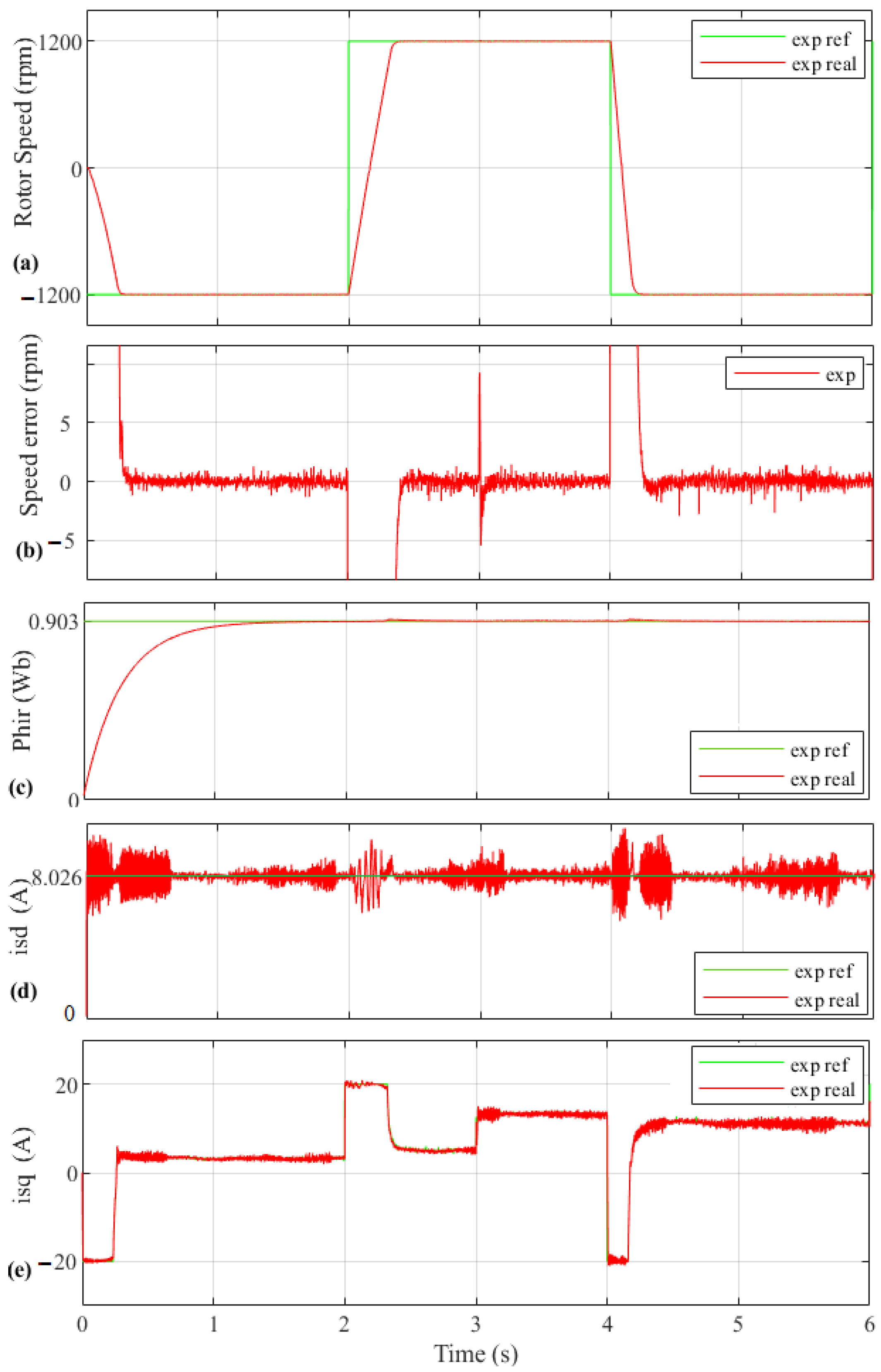
The outcome of experimental performance, which corresponds to the simulation presented in
Figure 11, is shown in
Figure 12. However, it is important to note that the value of
factor in the real machine employed in this experiment is 60% higher than the ISMC D2 design T3 tuning case. Graphs (a) and (b) show that the speed tracking and the speed error (minor than 2 rpm) are very satisfactory. Furthermore, rotor flux has good tracking, reaching, and maintaining the rated imposed value consistently, as shown in graph (c). These good accuracy is the result of proper tracking in both stator currents, graphs (d) and (e), which present highly satisfactory and resilient tracking in the presence of significant parameter uncertainties.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}