
Multigrid Method for Solving Inverse Problems for Heat Equation

 ,
,  , ,
, ,
Abstract
:1. Introduction
- Solution exists.
- Uniqueness—this solution is unique.
- Stability (the given data are continuously dependent on the solution).
2. Problem Statement
2.1. Inverse Boundary Value Problem
2.2. Initial Value Problem
3. Iterative Method
Landweber-Type Method
| Algorithm 1 L.T.1 |
| For loop: k: =1, 2, 3,… |
| % determine the size of domain |
| % initial guess (zeros vector) |
| % create Identity Matrix |
| End loop |
| Algorithm 2 L.T.2 |
| For loop: k: =1, 2, 3,… |
| % determine the size of domain |
| % initial guess (zeros vector) |
| % create Identity Matrix |
| % determine the relaxation parameter |
| End loop |
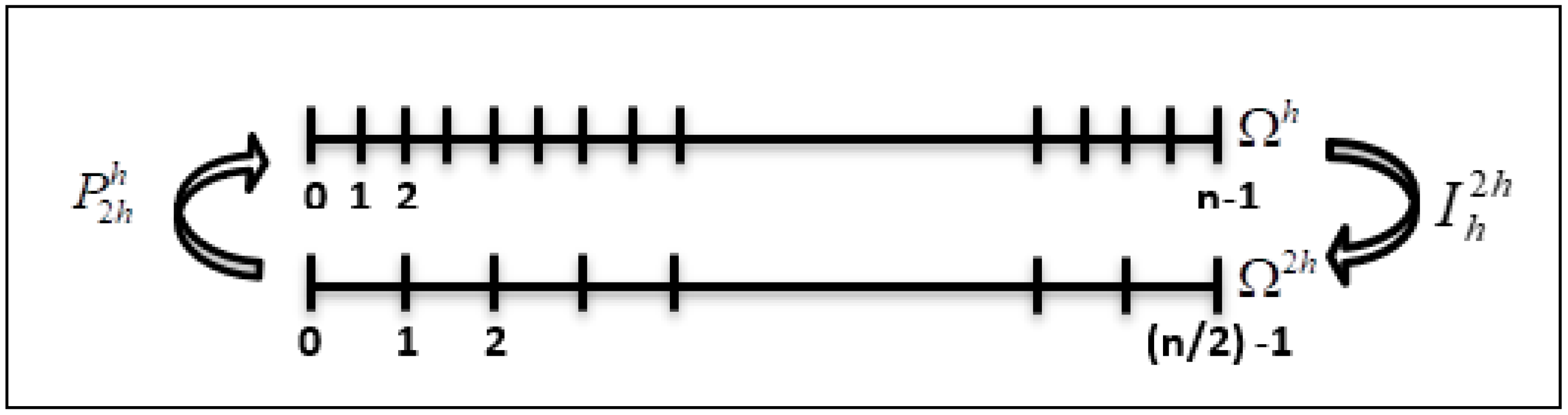
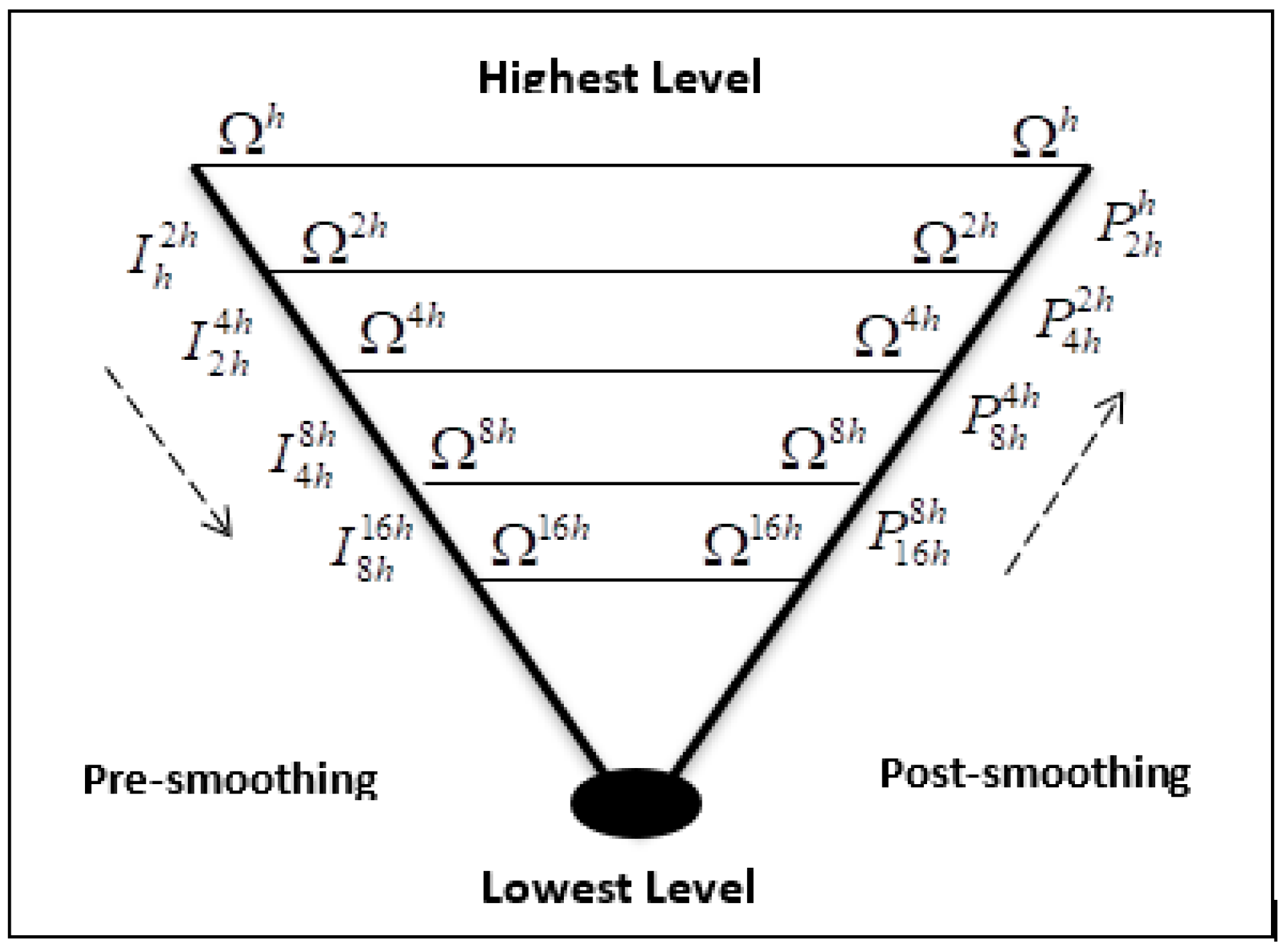
4. Multigrid Method Algorithms
- Relax , initial guess
- Compute residual
- Relax , initial guess
- Compute residual
- Relax , initial guess
- Compute residual
- Solve
- correct
- Relax , initial guess
- correct
- Relax , initial guess
- correct
- Relax , initial guesswhere and .
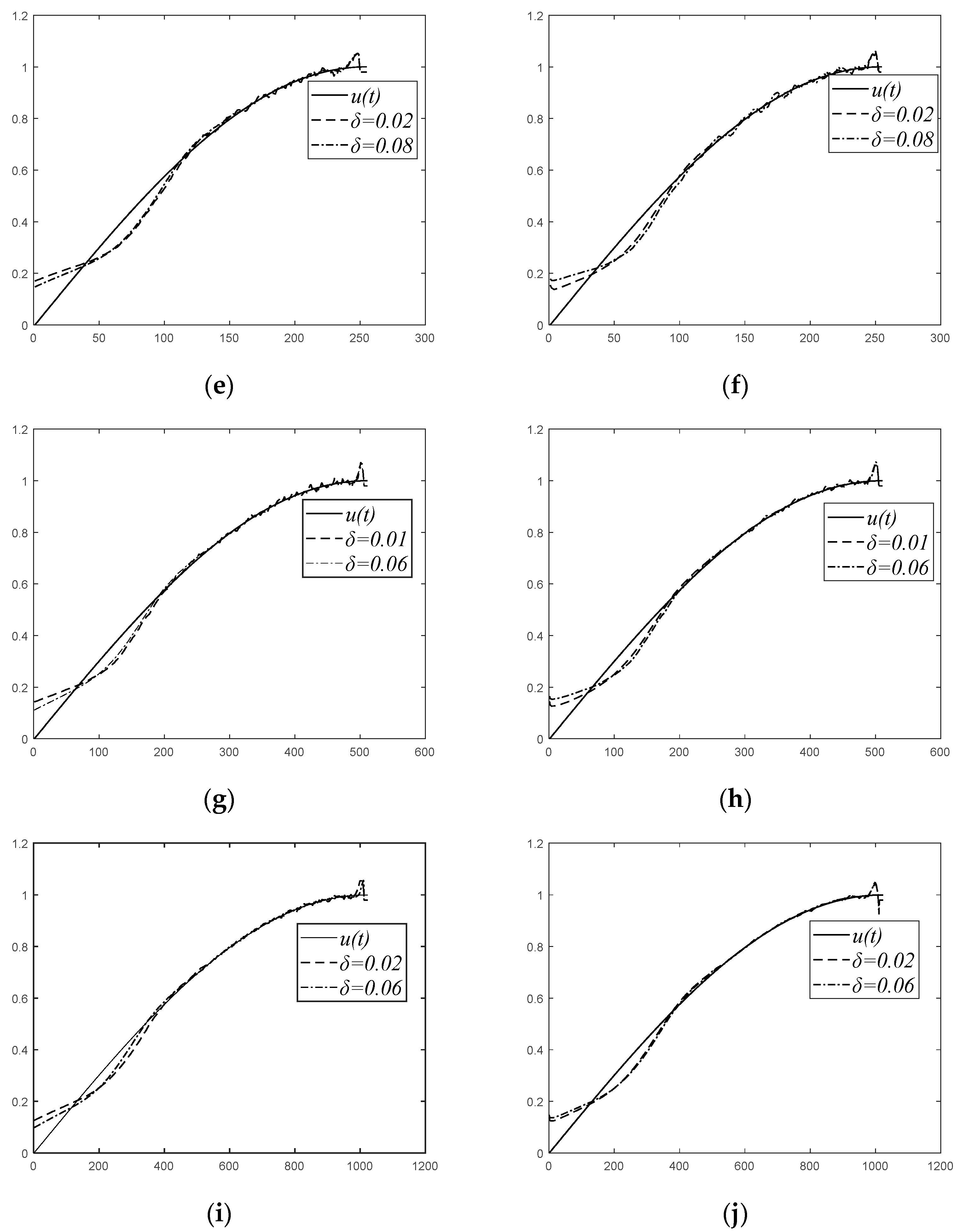
5. Numerical Results
5.1. Boundary Value Problem
| Algorithm 3 V.M |
| % define function grid with three input |
| % determine the size of domain |
| ) % Call Algorithm 1 L.T.1 or Algorithm 2 L.T.2 with low iteration times |
| If (n > size of lowest level) |
| % Compute Residual |
| for i = 1:n % Create prolongation matrix |
| P(2*i − 1, i) = 1; |
| P(2*i, i)= 2; |
| P(2*i + 1, i) = 1; |
| End |
| % Create interpolation matrix |
| % from fine-grid to coarse-grid |
| interpolation matrix |
| % initial guess (zeros vector) |
| % used recursion function |
| %from coarse-grid to fine-grid |
| % correct |
| end |
| ) % Call Algorithm 1 L.T.1 or Algorithm 2 L.T.2 with low iteration times with low iteration times |
5.2. Initial Value Problem
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Daniell, P.J.; Hadamard, J. Lectures on Cauchy’s Problem in Linear Partial Differential Equations. Math. Gaz. 1924, 12, 173–174. [Google Scholar] [CrossRef]
- Al-Mahdawi, H.K. Studying the Picard’s Method for Solving the Inverse Cauchy Problem for Heat Conductivity Equations. Bull. South Ural State Univ. Ser. Comput. Math. Softw. Eng. 2019, 8, 5–14. [Google Scholar] [CrossRef]
- Al-Mahdawi, H.K. Development the Regularization Computing Method for Solving Boundary Value Problem to Heat Equation in the Composite Materials. J. Phys. Conf. Ser. 2021, 1999, 012136. [Google Scholar] [CrossRef]
- Al-Mahdawi, H.K. Development the Numerical Method to Solve the Inverse Initial Value Problem for the Thermal Conductivity Equation of Composite Materials. J. Phys. Conf. Ser. 2021, 1879, 032016. [Google Scholar] [CrossRef]
- Al-Mahdawi, H.K.; Sidikova, A.I. An approximate solution of fredholm integral equation of the first kind by the regularization method with parallel computing. Turk. J. Comput. Math. Educ. 2021, 12, 4582–4591. [Google Scholar]
- Tikhonov, A.N. On the regularization of ill-posed problems. Proc. USSR Acad. Sci. 1963, 153, 49–52. [Google Scholar]
- Lavrentiev, M.M. The inverse-problem in potential theory. Dokl. Akad. Nauk. SSSR 1956, 106, 389–390. [Google Scholar]
- Ivanov, V.K. The application of Picard’s method to the solution of integral equations of the first kind. Bull. Inst. Politenn. Iasi. 1968, 14, 71–78. [Google Scholar]
- Tanana, V. Completeness of the system of eigenfunctions of the Sturm-Liouville problem with the singularity. Vestn. Udmurt. Univ. Mat. Mekhanika. Komp’yuternye Nauk. 2020, 30, 59–63. [Google Scholar] [CrossRef] [Green Version]
- Tanana, V.P.; Sidikova, A.I. Optimal Methods for Ill-Posed Problems: With Applications to Heat Conduction; Walter de Gruyter GmbH & Co. KG: Berlin, Germany, 2018; Volume 62. [Google Scholar]
- Tanana, V.P. Optimization of Methods for Solving Inverse Problems. In Proceedings of the 2018 International Russian Automation Conference (RusAutoCon), Chelyabinsk, Russia, 9–16 September 2018; pp. 1–7. [Google Scholar]
- Tanana, V.P.; Markov, B.A. The control problem for the heat equation in the case of a composite material. J. Phys. Conf. Ser. 2021, 1715, 012049. [Google Scholar] [CrossRef]
- Tanana, V.P.; Sidikova, A.I.; Ershova, A.A. A numerical solution to a problem of crystal energy spectrum determination by the heat capacity dependent on a temperature. Eurasian J. Math. Comput. Appl. 2017, 5, 87–94. [Google Scholar] [CrossRef]
- Tanana, V.P.; Rudakova, T.N. The optimum of the MM Lavrent’ev method. J. Inverse Ill-Posed Probl. 2011, 18. [Google Scholar] [CrossRef]
- Ivanov, V.K.; Vasin, V.V.; Tanana, V.P. Theory of Linear Ill-Posed Problems and Its Applications; Walter de Gruyter: Berlin, Germany, 2013; Volume 36. [Google Scholar]
- Tanana, V.P. A comparison of error estimates at a point and on a set when solving ill-posed problems. J. Inverse Ill-Posed Probl. 2017, 26, 541–550. [Google Scholar] [CrossRef]
- Tanana, V.P. On Reducing an Inverse Boundary-Value Problem to the Synthesis of Two Ill-Posed Problems and Their Solution. Numer. Anal. Appl. 2020, 13, 180–192. [Google Scholar] [CrossRef]
- Tanana, V.P.; Vishnyakov, E.Y.; Sidikova, A.I. An approximate solution of a Fredholm integral equation of the first kind by the residual method. Numer. Anal. Appl. 2016, 9, 74–81. [Google Scholar] [CrossRef]
- Tanana, V.P.; Markov, B.A. Uniqueness, existence and solution of the direct boundary heat exchange problem for a weakly non-linear temperature conductivity coefficient. J. Phys. Conf. Ser. 2021, 1715, 012050. [Google Scholar] [CrossRef]
- Glasko, V.B.; Kulik, N.I.; Shklyarov, I.N.; Tikhonov, A.N. An inverse problem of heat conductivity. Zhurnal Vychislitel’Noi Mat. I. Mat. Fiz. 1979, 19, 768–774. [Google Scholar]
- Belonosov, A.S.; Shishlenin, M.A. Continuation problem for the parabolic equation with the data on the part of the boundary. Siber. Electron. Math. Rep. 2014, 11, 22–34. [Google Scholar]
- Kabanikhin, S.I.; Hasanov, A.; Penenko, A.V. A gradient descent method for solving an inverse coefficient heat conduction problem. Numer. Anal. Appl. 2008, 1, 34–45. [Google Scholar] [CrossRef]
- Yagola, A.G.; Stepanova, I.E.; Van, Y.; Titarenko, V.N. Obratnye zadachi i metody ikh resheniya. Prilozheniya k geofizike. In Inverse Problems and Methods for their Solution: Applications to Geophysic; Binom. Laboratoriya Znanii: Moscow, Russia, 2014. [Google Scholar]
- Kabanikhin, S.I.; Krivorot’Ko, O.I.; Shishlenin, M.A. A numerical method for solving an inverse thermoacoustic problem. Numer. Anal. Appl. 2013, 6, 34–39. [Google Scholar] [CrossRef]
- Tanana, V.P. On the order-optimality of the projection regularization method in solving inverse problems. Sib. Zh. Ind. Mat. 2004, 7, 117–132. [Google Scholar]
- Gaspar, F.J.; Rodrigo, C. Multigrid Waveform Relaxation for the Time-Fractional Heat Equation. SIAM J. Sci. Comput. 2017, 39, A1201–A1224. [Google Scholar] [CrossRef] [Green Version]
- Stüben, K.; Trottenberg, U. Multigrid methods: Fundamental algorithms, model problem analysis and applications. In Multigrid Methods; Springer: Berlin/Heidelberg, Germany, 1982; pp. 1–176. [Google Scholar] [CrossRef]
- Wesseling, P. Introduction to Multigrid Methods; Institute for Computer Applications in Science and Engineering: Hampton, VA, USA, 1995. [Google Scholar]
- Ye, J.C.; Bouman, C.; Webb, K.; Millane, R. Nonlinear multigrid algorithms for Bayesian optical diffusion tomography. IEEE Trans. Image Process. 2001, 10, 909–922. [Google Scholar] [CrossRef]
- Briggs, W.L.; Henson, V.E.; McCormick, S.F. A Multigrid Tutorial; SIAM: Philadelphia, PA, USA, 2000. [Google Scholar]
- Vogel, C.R.; Yang, Q. Multigrid algorithm for least-squares wavefront reconstruction. Appl. Opt. 2006, 45, 705–715. [Google Scholar] [CrossRef] [PubMed]
- Adavani, S.S.; Biros, G. Multigrid Algorithms for Inverse Problems with Linear Parabolic PDE Constraints. SIAM J. Sci. Comput. 2008, 31, 369–397. [Google Scholar] [CrossRef] [Green Version]
- Al-Mahdawi, H.K. Solving of an Inverse Boundary Value Problem for the Heat Conduction Equation by Using Lavrentiev Regularization Method. J. Phys. Conf. Ser. 2021, 1715, 012032. [Google Scholar] [CrossRef]
- Sidikova, A.I. A Study of an Inverse Boundary Value Problem for the Heat Conduction Equation. Numer. Anal. Appl. 2019, 12, 70–86. [Google Scholar] [CrossRef]
- Al-Mahdawi, H.K. Development of a Numerical Method for Solving the Inverse Cauchy Problem for the Heat Equation. Bull. South Ural State Univ. Ser. Comput. Math. Softw. Eng. 2019, 8, 22–31. [Google Scholar] [CrossRef] [Green Version]
- Landweber, L. An Iteration Formula for Fredholm Integral Equations of the First Kind. Am. J. Math. 1951, 73, 615. [Google Scholar] [CrossRef]
- Mesgarani, H.; Azari, Y. Numerical investigation of Fredholm integral equation of the first kind with noisy data. Math. Sci. 2019, 13, 267–278. [Google Scholar] [CrossRef] [Green Version]
- Nikazad, T.; Abbasi, M.; Elfving, T. Error minimizing relaxation strategies in Landweber and Kaczmarz type iterations. J. Inverse Ill.-Posed Probl. 2017, 25, 35–56. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | CPU Time Seconds | No. of Iterations | |||
|---|---|---|---|---|---|
| 64 | Algorithm 1 L.T.1 | 0.01 | 0.042 | 0.001 | 400 |
| 0.04 | 0.041 | 0.02 | |||
| Algorithm 3 V.M | 0.01 | 0.039 | 0.015 | ||
| 0.04 | 0.035 | 0.024 | |||
| 128 | Algorithm 1 L.T.1 | 0.02 | 0.132 | 0.016 | 300 |
| 0.05 | 0.147 | 0.029 | |||
| Algorithm 3 V.M | 0.02 | 0.122 | 0.019 | ||
| 0.05 | 0.103 | 0.032 | |||
| 256 | Algorithm 1 L.T.1 | 0.02 | 0.46 | 0.02 | 200 |
| 0.08 | 0.481 | 0.04 | |||
| Algorithm 3 V.M | 0.02 | 0.593 | 0.026 | ||
| 0.08 | 0.566 | 0.05 | |||
| 512 | Algorithm 1 L.T.1 | 0.01 | 10.98 | 0.023 | 500 |
| 0.06 | 11.03 | 0.039 | |||
| Algorithm 3 V.M | 0.01 | 4.914 | 0.027 | ||
| 0.06 | 4.838 | 0.03 | |||
| 1024 | Algorithm 1 L.T.1 | 0.02 | 63.636 | 0.034 | 500 |
| 0.06 | 66.03 | 0.042 | |||
| Algorithm 3 V.M | 0.02 | 31.38 | 0.033 | ||
| 0.06 | 32.04 | 0.041 |
| Algorithm | CPU Time Seconds | No. of Iterations | |||
|---|---|---|---|---|---|
| 512 | Algorithm 2 L.T.2 | 0.064 | 0.760 | 77 | 0.041 |
| Algorithm 3 V.M | 0.127 | ||||
| 1024 | Algorithm 2 L.T.2 | 0.09 | 4.405 | 84 | 0.0567 |
| Algorithm 3 V.M | 0.684 | ||||
| 2048 | Algorithm 2 L.T.2 | 0.13 | 28.718 | 91 | 0.0816 |
| Algorithm 3 V.M | 4.026 | ||||
| 4096 | Algorithm 2 L.T.2 | 0.18 | 252.61 | 102 | 0.115 |
| Algorithm 3 V.M | 28.381 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Mahdawi, H.K.I.; Abotaleb, M.; Alkattan, H.; Tareq, A.-M.Z.; Badr, A.; Kadi, A. Multigrid Method for Solving Inverse Problems for Heat Equation. Mathematics 2022, 10, 2802. https://doi.org/10.3390/math10152802
Al-Mahdawi HKI, Abotaleb M, Alkattan H, Tareq A-MZ, Badr A, Kadi A. Multigrid Method for Solving Inverse Problems for Heat Equation. Mathematics. 2022; 10(15):2802. https://doi.org/10.3390/math10152802
Chicago/Turabian StyleAl-Mahdawi, Hassan K. Ibrahim, Mostafa Abotaleb, Hussein Alkattan, Al-Mahdawi Zena Tareq, Amr Badr, and Ammar Kadi. 2022. "Multigrid Method for Solving Inverse Problems for Heat Equation" Mathematics 10, no. 15: 2802. https://doi.org/10.3390/math10152802
APA StyleAl-Mahdawi, H. K. I., Abotaleb, M., Alkattan, H., Tareq, A. -M. Z., Badr, A., & Kadi, A. (2022). Multigrid Method for Solving Inverse Problems for Heat Equation. Mathematics, 10(15), 2802. https://doi.org/10.3390/math10152802