
Fixed-Time Convergent Gradient Neural Network for Solving Online Sylvester Equation


Abstract
:1. Introduction
- (1)
- As significant enhancements to the GNN models with infinite-time and finite-time convergence, a fixed-time convergent GNN (FTC-GNN) model is developed as a solution to the Sylvester equation. More specifically, the presented GNN model outperforms the linear GNN model [30] with exponential convergence (infinite-time convergence) and the sbp function activated GNN model [33] with declared finite-time convergence in terms of convergence performance.
- (2)
- The mathematical analysis of the fixed-time convergence of the presented GNN model is provided. It is shown that the convergence time of the presented FTC-GNN model has a predetermined upper bound, which is independent of the initial conditions. It is noted that infinite-time convergent (e.g., exponential convergence) and finite-time convergent GNN models do not have such a feature. In addition, the theoretical analysis in terms of convergence of the sbp function activated GNN model presented in the previous work [33] is also provided. These theoretical results demonstrate that the sbp function activated GNN model with declared finite-time convergence is, in fact, of fixed-time convergence, and the presented GNN model has faster fixed-time convergence as compared to the sbp function activated GNN model.
- (3)
- Comparative simulation results of two examples demonstrate the theoretical results as well as the superior convergence performance of the presented FTC-GNN model.
2. Preliminaries and Model Description
2.1. Preliminaries
- (1)
- It is of globally asymptotical stability;
- (2)
- There exists a mapping function , such that, , when , where T is called the settling-time function and is an arbitrary solution starting from .
- (1)
- It is of global finite-time stability;
- (2)
- There exists a positive constant , such that, for any , .
- (1)
- is radially unbounded and holds the property of positive definiteness;
- (2)
- and , for any solution of system (1), where and .
- (1)
- is radially unbounded and holds the property of positive definiteness;
- (2)
- and , for any solution of system (1), where and .
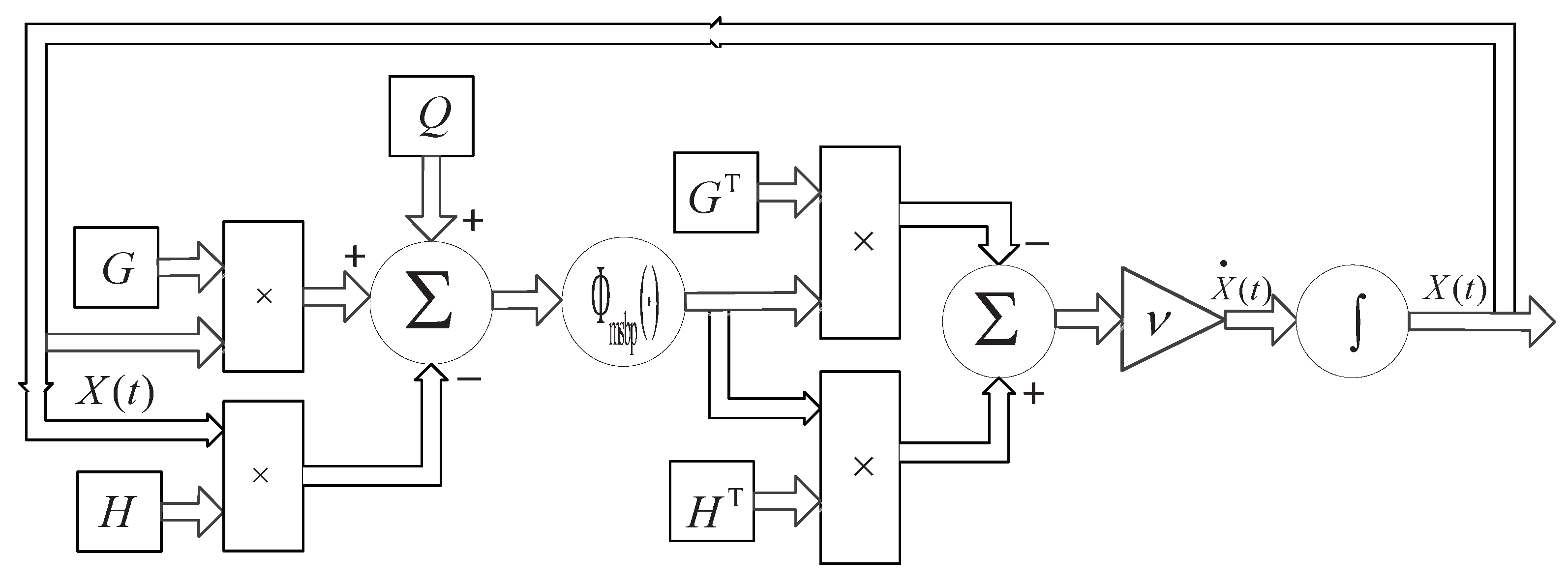
2.2. Model Description
3. Theoretical Analysis
4. Numerical Simulations
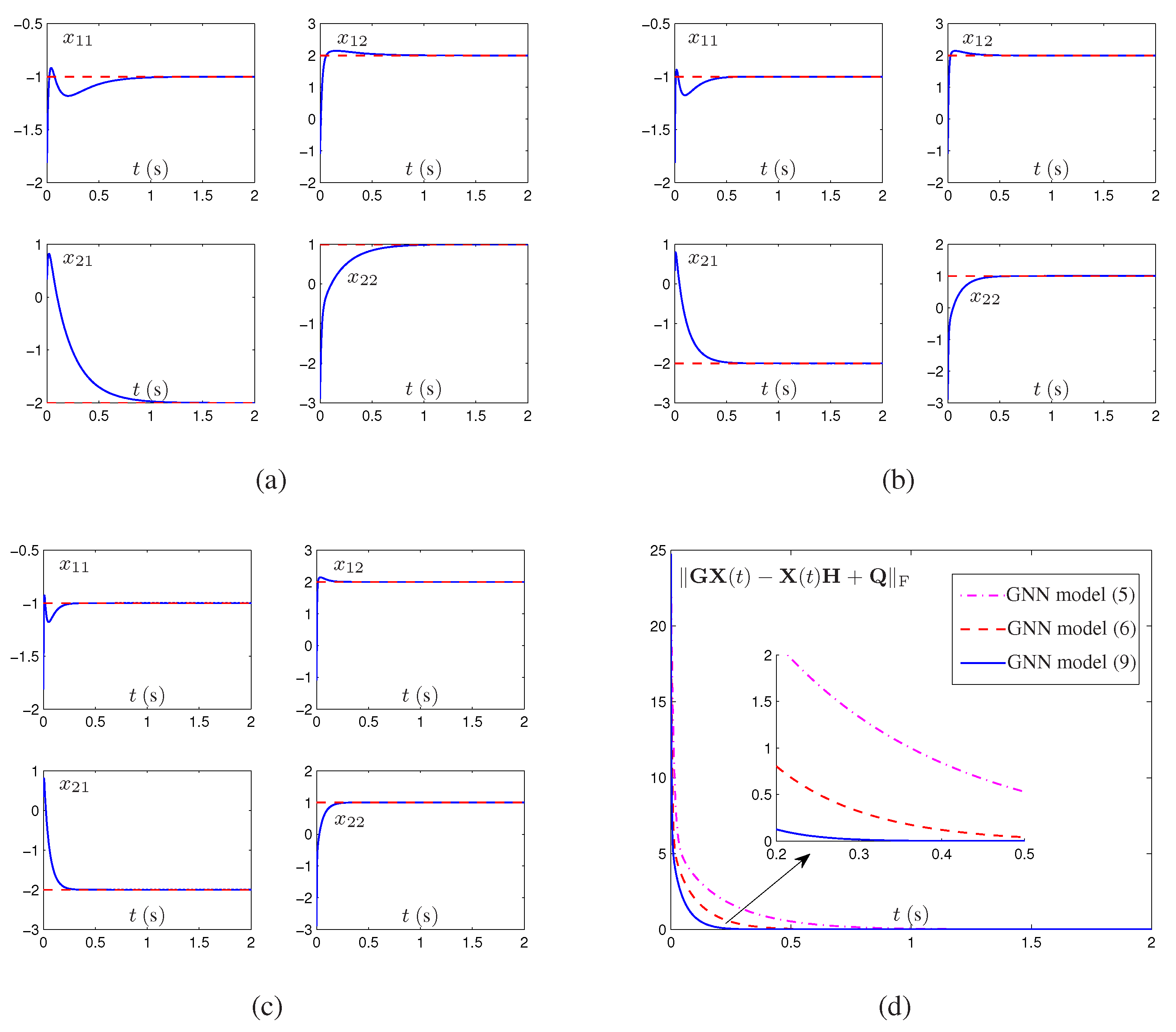
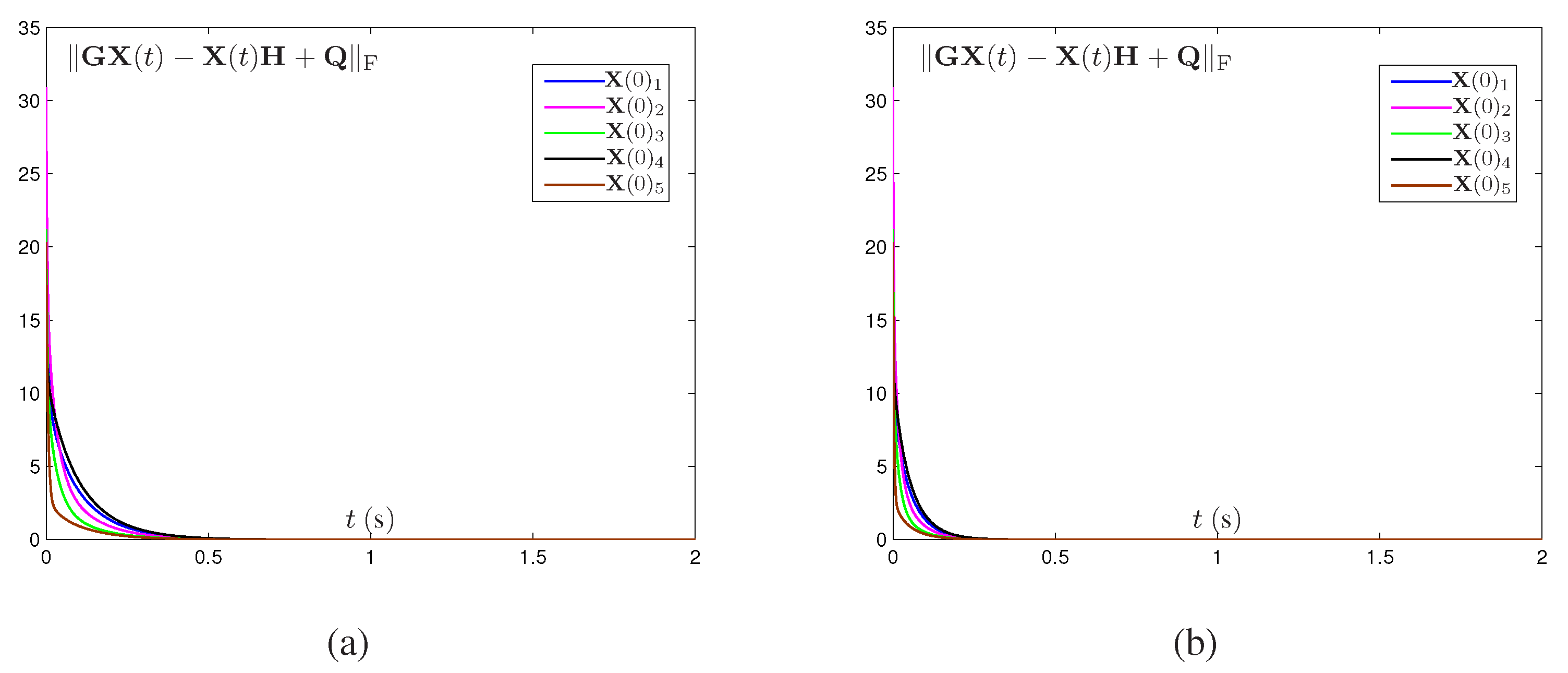
4.1. Example 1
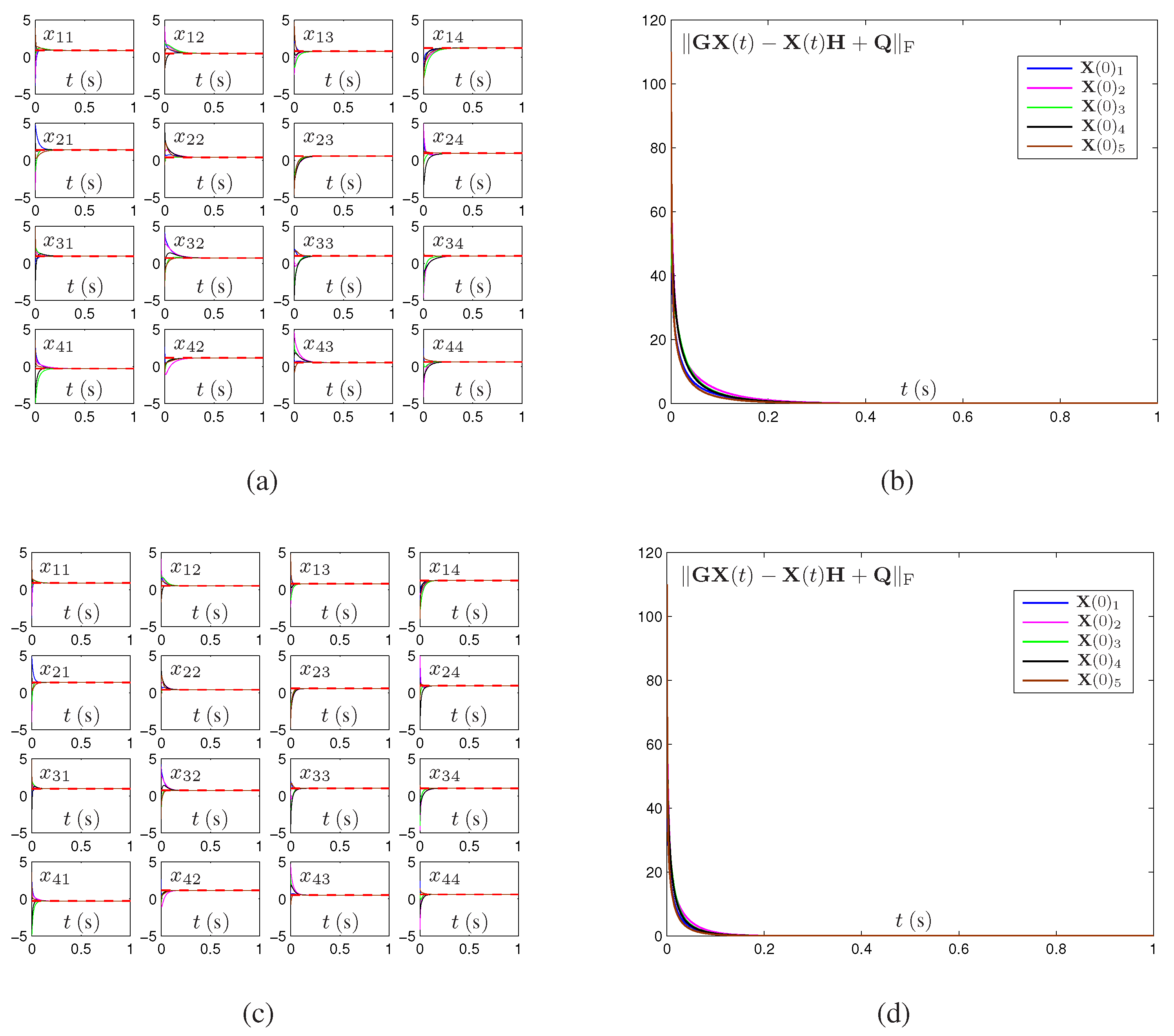
4.2. Example 2
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| GNN | gradient neural network |
| FTC-GNN | fixed-time convergent GNN |
| PDE | partial differential equation |
| ODE | ordinary differential equation |
| RNN | recurrent neural network |
| ZNN | zeroing neural network |
| SBP | sign-bi-power |
| MSBP | modified sign-bi-power |
Appendix A. Proof to Proposition 2
References
- Wei, Q.; Dobigeon, N.; Tourneret, J.-Y.; Bioucas-Dias, J.; Godsill, S. R-FUSE: Robust fast fusion of multiband images based on solving a Sylvester equation. IEEE Signal Process. Lett. 2016, 23, 1632–1636. [Google Scholar] [CrossRef]
- Peralta, D.; Saeys, Y. Robust unsupervised dimensionality reduction based on feature clustering for single-cell imaging data. Appl. Soft Comput. 2020, 93, 106421. [Google Scholar] [CrossRef]
- Darouach, M. Solution to Sylvester equation associated to linear descriptor systems. Syst. Control Lett. 2016, 55, 835–838. [Google Scholar] [CrossRef]
- Chen, G.; Song, Y.; Wang, F.; Zhang, C. Semi-supervised multi-label learning by solving a Sylvester equation. In Proceedings of the 2008 SIAM International Conference on Data Mining (SDM), Atlanta, GA, USA, 24–26 April 2008; pp. 410–419. [Google Scholar]
- Natarajan, V. Compensating PDE actuator and sensor dynamics using Sylvester equation. Automatica 2021, 123, 109362. [Google Scholar] [CrossRef]
- Kittisopaporn, A.; Chansangiam, P.; Lewkeeratiyutkul, W. Convergence analysis of gradient-based iterative algorithms for a class of rectangular Sylvester matrix equations based on Banach contraction principle. Adv. Differ. Equ. 2021, 2021, 17. [Google Scholar] [CrossRef]
- Zhang, J.; Luo, X. Gradient-based optimization algorithm for solving Sylvester matrix equation. Mathematics 2022, 10, 1040. [Google Scholar] [CrossRef]
- Bartels, R.H.; Stewart, G.W. Solution of the matrix equation AX + XB = C. Commun. ACM 1972, 15, 820–826. [Google Scholar] [CrossRef]
- Kleinman, D.; Rao, P.K. Extensions to the Bartels–Stewart algorithm for linear matrix equations. IEEE Trans. Autom. Control 1978, 23, 85–87. [Google Scholar] [CrossRef]
- Stykel, T. Numerical solution and perturbation theory for generalized Lyapunov equations. Linear Algebra Appl. 2002, 349, 155–185. [Google Scholar] [CrossRef]
- Mathews, J.H.; Fink, K.D. Numerical Methods Using MATLAB; Pretice Hall: Hoboken, NJ, USA, 2004. [Google Scholar]
- Li, S.; Li, Y. Nonlinearly activated neural network for solving time-varying complex Sylvester equation. IEEE Trans. Cybern. 2014, 44, 1397–1407. [Google Scholar] [CrossRef]
- Atencia, M.; Boumeridja, H.; Joya, G.; García-Lagos, F.; Sandoval, F. FPGA implementation of a systems identification module based upon Hopfield networks. Neurocomputing 2007, 70, 2828–2835. [Google Scholar] [CrossRef]
- Ortega-Zamorano, F.; Jerez, J.M.; Franco, L. FPGA implementation of the C-Mantec neural network constructive algorithm. IEEE Trans. Ind. Inform. 2014, 10, 1154–1161. [Google Scholar] [CrossRef]
- Che, H.; Wang, J. A two-timescale duplex neurodynamic approach to biconvex optimization. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 2503–2514. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, D.; Wang, J. A recurrent neural network for solving Sylvester equation with time-varying coefficients. IEEE Trans. Neural Netw. 2002, 13, 1053–1063. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Chen, S.; Liu, B. Accelerating a recurrent neural network to finite-time convergence for solving time-varying Sylvester equation by using a sign-bi-power activation function. Neural Process Lett. 2013, 37, 189–205. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, Y.; Dai, J.; Li, J.; Li, W. New noise-tolerant ZNN models with predefined-time convergence for time-variant Sylvester equation solving. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3629–3640. [Google Scholar] [CrossRef]
- Lei, Y.; Dai, Z.; Liao, B.; Xia, G.; He, Y. Double features zeroing neural network model for solving the pseudoninverse of a complex-valued time-varying matrix. Mathematics 2022, 10, 2122. [Google Scholar] [CrossRef]
- Xiao, L.; He, Y. A Noise-suppression ZNN model with new variable parameter for dynamic Sylvester equation. IEEE Trans. Ind. Inform. 2021, 17, 7513–7522. [Google Scholar] [CrossRef]
- Xiao, L.; Tao, J.; Li, W. An arctan-type varying-parameter ZNN for solving time-varying complex Sylvester equations in finite time. IEEE Trans. Ind. Inform. 2022, 18, 3651–3660. [Google Scholar] [CrossRef]
- Tan, Z.; Li, W.; Xiao, L.; Hu, Y. New varying-parameter ZNN models with finite-time convergence and noise suppression for time-varying matrix Moore-Penrose inversion. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 2980–2992. [Google Scholar] [CrossRef]
- Gerontitis, D.; Behera, R.; Tzekis, P.; Stanimirović, P. A family of varying-parameter finite-time zeroing neural networks for solving time-varying Sylvester equation and its application. J. Comput. Appl. Math. 2022, 403, 113826. [Google Scholar] [CrossRef]
- Zhang, Z.; Zheng, L. A complex varying-parameter convergent-differential neural-network for solving online time-varying complex Sylvester equation. IEEE Trans. Cybern. 2019, 49, 3627–3639. [Google Scholar] [CrossRef] [PubMed]
- He, Y.; Liao, B.; Xiao, L.; Han, L.; Xiao, X. Double accelerated convergence ZNN with noise-suppression for handling dynamic matrix inversion. Mathematics 2022, 10, 50. [Google Scholar] [CrossRef]
- Shi, Y.; Jin, L.; Li, S.; Qiang, J. Proposing, developing and verification of a novel discrete-time zeroing neural network for solving future augmented Sylvester matrix equation. J. Frankl. Inst. 2020, 357, 3636–3655. [Google Scholar] [CrossRef]
- Xiao, L.; Huang, W.; Jia, L.; Li, X. Two discrete ZNN models for solving time-varying augmented complex Sylvester equation. Neurocomputing 2022, 487, 280–288. [Google Scholar] [CrossRef]
- Qi, Y.; Jin, L.; Li, H.; Li, Y.; Liu, M. Discrete computational neural dynamics models for solving time-dependent Sylvester equation with applications to robotics and MIMO systems. IEEE Trans. Ind. Inform. 2020, 16, 6231–6241. [Google Scholar] [CrossRef]
- Shi, Y.; Jin, L.; Li, S.; Li, J.; Qiang, J.; Gerontitis, D.K. Novel discrete-time recurrent neural networks handling discrete-form time-variant multi-augmented Sylvester matrix problems and manipulator application. IEEE Trans. Neural Netw. Learn Syst. 2022, 33, 587–599. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, Y.; Chen, K.; Cai, B. MATLAB simulation of gradient-based neural network for Sylvester equation solving. J. Syst. Simul. 2009, 21, 4028–4031, 4037. (In Chinese) [Google Scholar]
- Liu, B.; Fu, D.; Qi, Y.; Huang, H.; Jin, L. Noise-tolerant gradient-oriented neurodynamic model for solving the Sylvester equation. Appl. Soft Comput. 2021, 109, 107514. [Google Scholar] [CrossRef]
- Liao, S.; Liu, J.; Xiao, X.; Fu, D.; Wang, G.; Jin, L. Modified gradient neural networks for solving the time-varying Sylvester equation with adaptive coefficients and elimination of matrix inversion. Neurocomputing 2020, 379, 1–11. [Google Scholar] [CrossRef]
- Xiao, L.; Liao, B.; Luo, J.; Ding, L. A convergence-enhanced gradient neural network for solving Sylvester equation. In Proceedings of the 36th Chinese Control Conference, Dalian, China, 26–28 July 2017; pp. 3910–3913. [Google Scholar]
- Lv, L.; Chen, J.; Zhang, L.; Zhang, F. Gradient-based neural networks for solving periodic Sylvester matrix equations. J. Frankl. Inst. 2022; in press. [Google Scholar] [CrossRef]
- Shen, Y.; Miao, P.; Huang, Y.; Shen, Y. Finite-time stability and its application for solving time-varying Sylvester equation by recurrent neural network. Neural Process. Lett. 2015, 42, 763–784. [Google Scholar] [CrossRef]
- Tan, Z.; Hu, Y.; Chen, K. On the investigation of activation functions in gradient neural network for online solving linear matrix equation. Neurocomputing 2020, 413, 185–192. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Chen, C.; Li, L.; Peng, H.; Yang, Y. Fixed-time synchronization of inertial memristor-based neural networks with discrete delay. Neural Netw. 2019, 109, 81–89. [Google Scholar] [CrossRef]
- Hardy, G.; Littlewood, J.; Polya, G. Inequalities; Cambridge University Press: Cambridge, UK, 1952. [Google Scholar]
- Chen, K. Improved neural dynamics for online Sylvester equations solving. Inf. Process. Lett. 2016, 116, 455–459. [Google Scholar] [CrossRef]
- Qiu, B.; Zhang, Y.; Yang, Z. New discrete-time ZNN models for least-squares solution of dynamic linear equation system with time-varying rank-deficient coefficient. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 5767–5776. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, Z. Fixed-Time Convergent Gradient Neural Network for Solving Online Sylvester Equation. Mathematics 2022, 10, 3090. https://doi.org/10.3390/math10173090
Tan Z. Fixed-Time Convergent Gradient Neural Network for Solving Online Sylvester Equation. Mathematics. 2022; 10(17):3090. https://doi.org/10.3390/math10173090
Chicago/Turabian StyleTan, Zhiguo. 2022. "Fixed-Time Convergent Gradient Neural Network for Solving Online Sylvester Equation" Mathematics 10, no. 17: 3090. https://doi.org/10.3390/math10173090
APA StyleTan, Z. (2022). Fixed-Time Convergent Gradient Neural Network for Solving Online Sylvester Equation. Mathematics, 10(17), 3090. https://doi.org/10.3390/math10173090