





Utilisation of Initialised Observation Scheme for Multi-Joint Robotic Arm in Lyapunov-Based Adaptive Control Strategy


Abstract
:1. Introduction
- We tuned the controller parameters in real time based on stability analysis of the non-linear control system;
- The LAC’s parameters are initialised by using various observation methods and they are used to initialise the controller’s parameters.
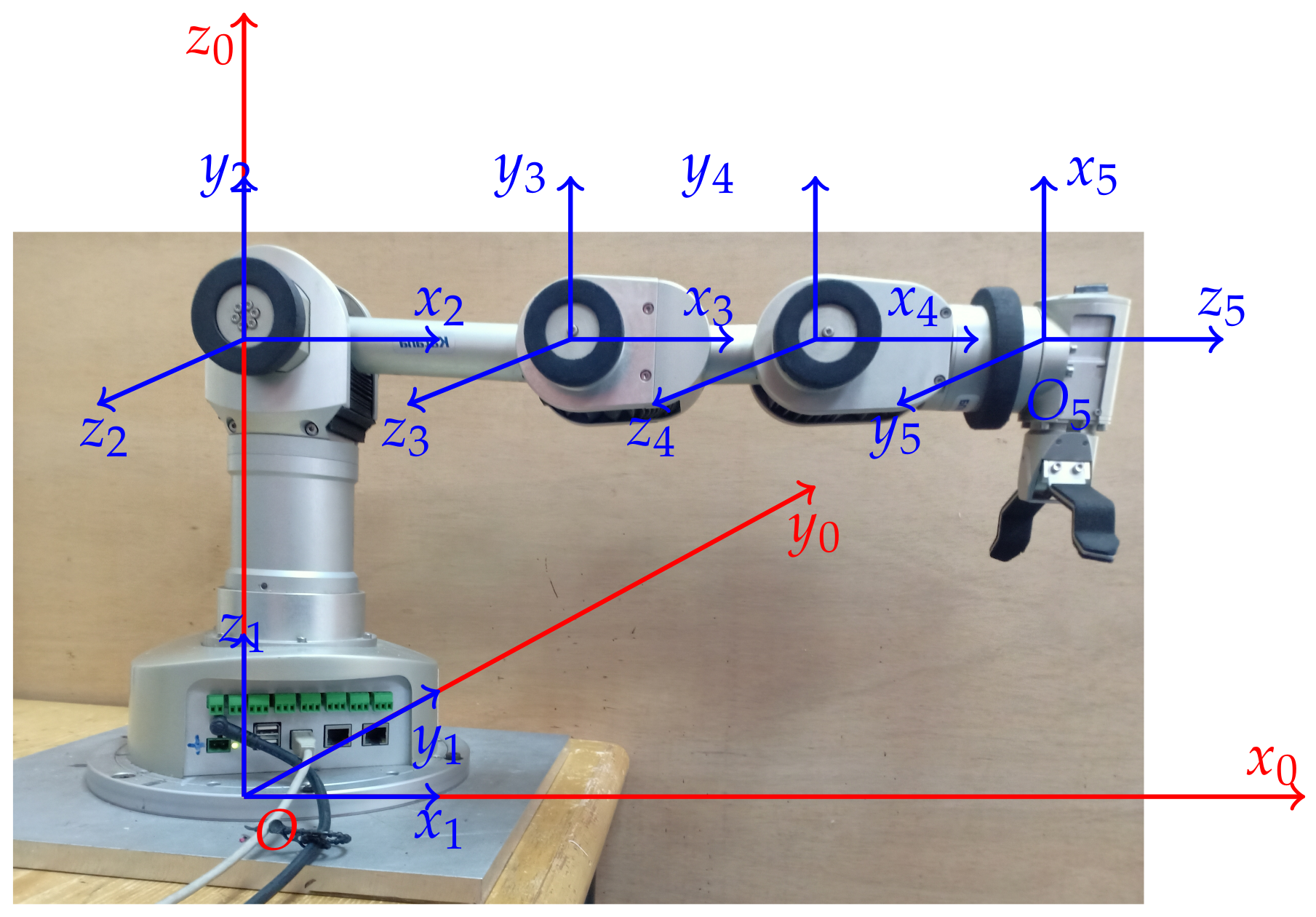
2. Structure and Dynamics of the Robotic Arm
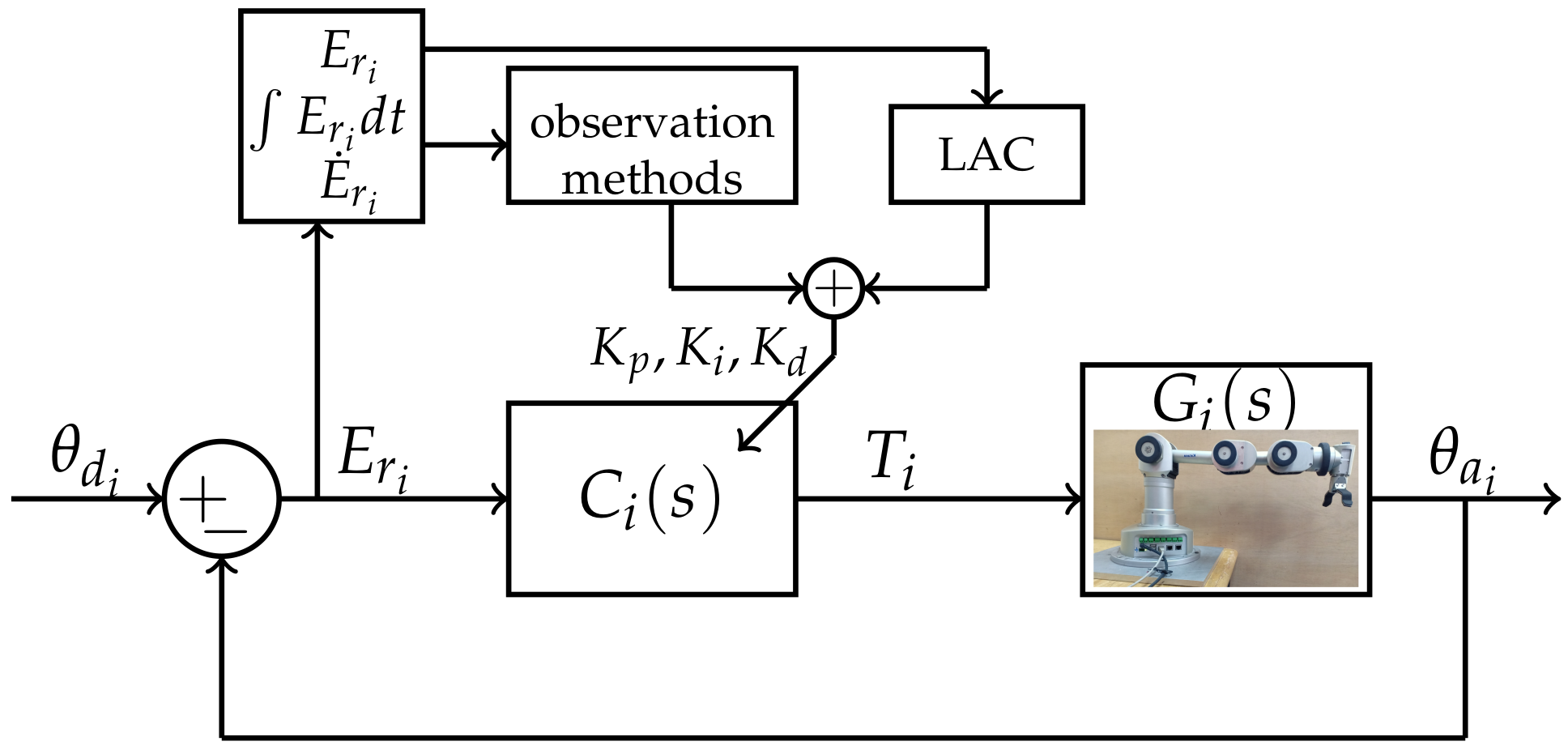
3. LAC Strategy for Robotic Arm Joints
Lyapunov-Based Adaptive Controller
| Algorithm 1. Pseudo-code of LAC. |
|
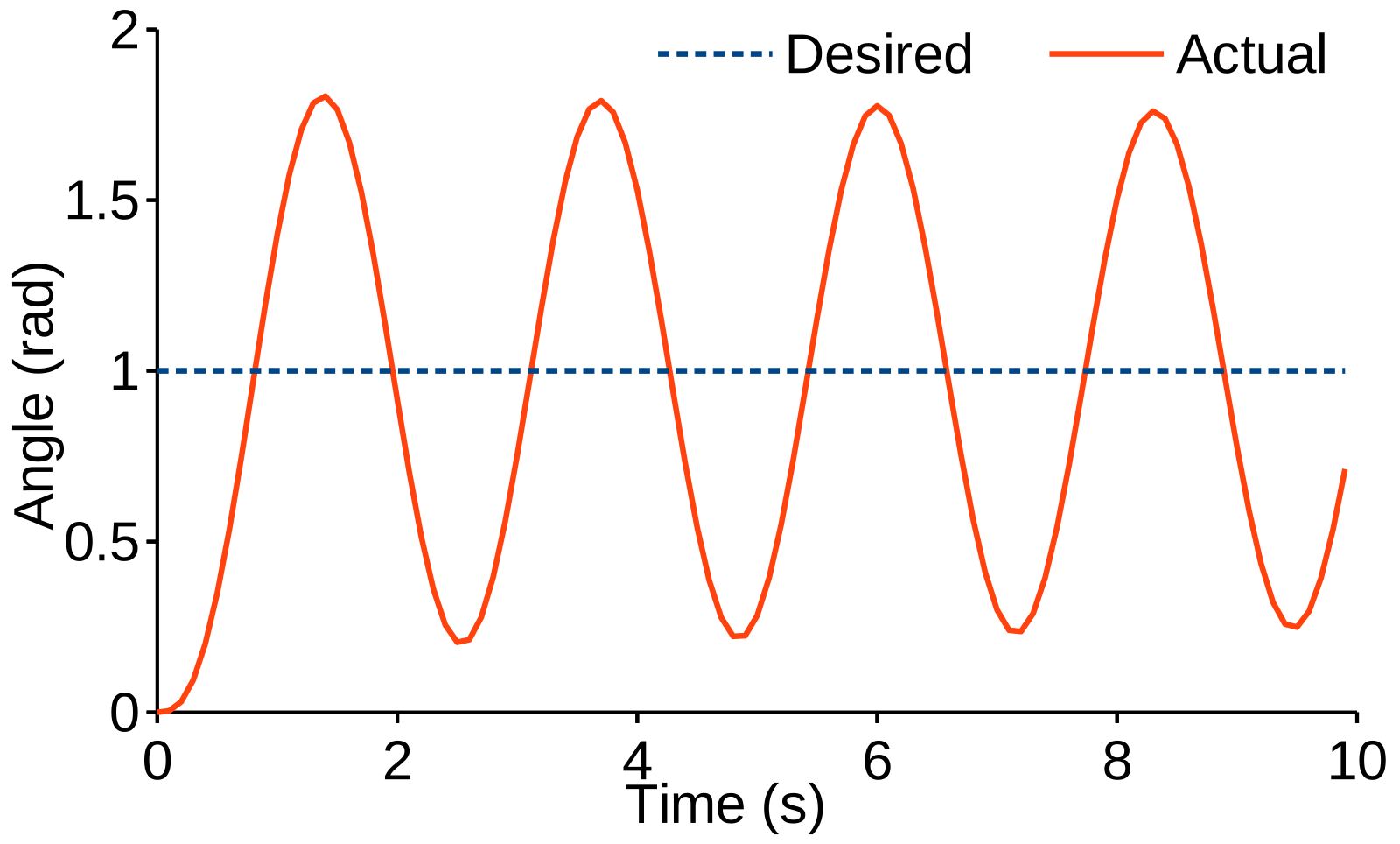
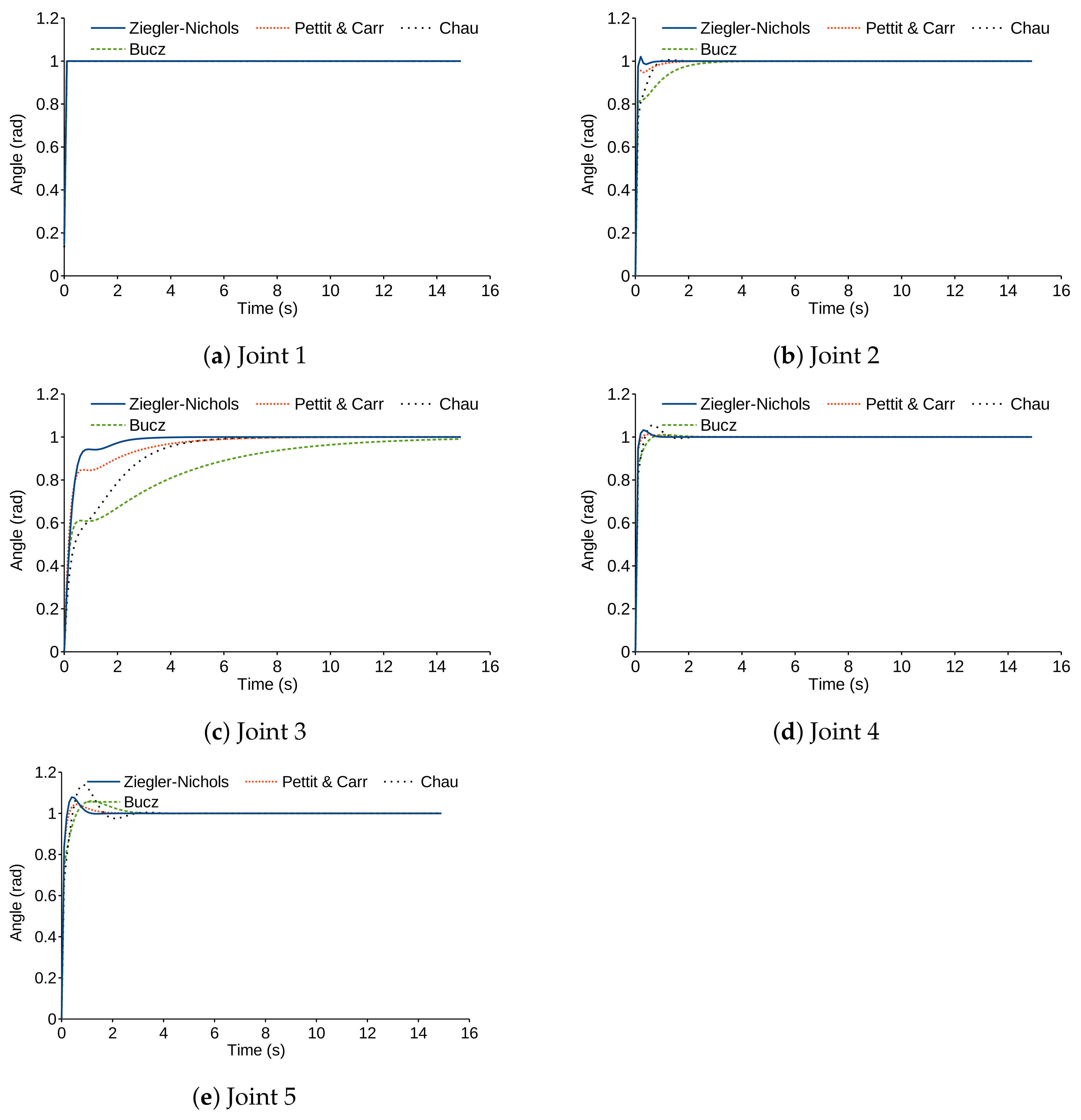
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wei, H.; Bu, Y.; Zhu, Z. Robotic arm controlling based on a spiking neural circuit and synaptic plasticity. Biomed. Signal Process. Control 2020, 55, 101640. [Google Scholar] [CrossRef]
- Jahnavi, K.; Sivraj, P. Teaching and Learning Robotic Arm Model. In Proceedings of the International Conference on Intelligent Computing, Instrumentation and Control Technologies, Kerala, India, 6–7 July 2017; pp. 1570–1575. [Google Scholar] [CrossRef]
- Quiros, A.R.F.; Abad, A.C.; Dadios, E.P. Object Locator and Collector Robotic Arm using Artificial Neural Networks. In Proceedings of the International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment and Management (HNICEM), Cebu, Philippines, 9–12 December 2016; pp. 200–203. [Google Scholar] [CrossRef]
- Ye, H.; Wang, D.; Wu, J.; Yue, Y.; Zhou, Y. Forward and inverse kinematics of a 5-DOF hybrid robot for composite material machining. Robot.-Comput.-Integr. Manuf. 2020, 65, 101961. [Google Scholar] [CrossRef]
- Montalvo, W.; Escobar-Naranjo, J.; Garcia, C.A.; Garcia, M.V. Low-Cost Automation for Gravity Compensation of Robotic Arm. Appl. Sci. 2020, 10, 3823. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, Z.; Wu, X.; Shi, Z.; Chen, Y.; Wu, B.; Mantey, K.A. Obstacle Avoidance and Path Planning for Multi-Joint Manipulator in a Space Robot. IEEE Access 2020, 8, 3511–3526. [Google Scholar] [CrossRef]
- Pavlovčič, U.; Arko, P.; Jezeršek, M. Simultaneous Hand–Eye and Intrinsic Calibration of a Laser Profilometer Mounted on a Robot Arm. Sensors 2021, 21, 1037. [Google Scholar] [CrossRef]
- Jeong, J.H.; Shim, K.H.; Kim, D.J.; Lee, S.W. Brain-Controlled Robotic Arm System Based on Multi-Directional CNN-BiLSTM Network Using EEG Signals. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 1226–1236. [Google Scholar] [CrossRef] [PubMed]
- Mahmud, M.; Motakabber, S.; Zahirul Alam, A.H.; Nordin, A.N. Adaptive PID Controller Using for Speed Control of the BLDC Motor. In Proceedings of the IEEE International Conference on Semiconductor Electronics (ICSE), Kuala Lumpur, Malaysia, 28–29 July 2020; pp. 168–171. [Google Scholar] [CrossRef]
- Misaghi, M.; Yaghoobi, M. Improved invasive weed optimization algorithm (IWO) based on chaos theory for optimal design of PID controller. J. Comput. Des. Eng. 2019, 6, 284–295. [Google Scholar] [CrossRef]
- Castillo-Zamora, J.J.; Camarillo-Gómez, K.A.; Pérez-Soto, G.I.; Rodriguez-Resendiz, J. Comparison of PD, PID and Sliding-Mode Position Controllers for V-Tail Quadcopter Stability. IEEE Access 2018, 6, 38086–38096. [Google Scholar] [CrossRef]
- Demirel, B.; Ghadimi, E.; Quevedo, D.E.; Johansson, M. Optimal Control of Linear Systems with Limited Control Actions: Threshold-Based Event-Triggered Control. IEEE Trans. Control Netw. Syst. 2018, 5, 1275–1286. [Google Scholar] [CrossRef]
- Ma, Z.; Yan, Z.; Shaltout, M.L.; Chen, D. Optimal Real-Time Control of Wind Turbine During Partial Load Operation. IEEE Trans. Control. Syst. Technol. 2015, 23, 2216–2226. [Google Scholar] [CrossRef]
- Belkadi, A.; Oulhadj, H.; Touati, Y.; Khan, S.A.; Daachi, B. On the robust PID adaptive controller for exoskeletons: A particle swarm optimization based approach. Appl. Soft Comput. 2017, 60, 87–100. [Google Scholar] [CrossRef]
- Phu, D.X.; Mien, V.; Tu, P.H.T.; Nguyen, N.P.; Choi, S.B. A New Optimal Sliding Mode Controller with Adjustable Gains based on Bolza-Meyer Criterion for Vibration Control. J. Sound Vib. 2020, 485, 115542. [Google Scholar] [CrossRef]
- Wang, L.; Liu, J.; Li, Y. The optimal controller design framework for PID-based vibration active control systems via non-probabilistic time-dependent reliability measure. ISA Trans. 2020, 105, 129–145. [Google Scholar] [CrossRef]
- Suhaimin, S.C.; Azmi, N.L.; Rahman, M.M.; Yusof, H.M. Analysis of Point-to-Point Robotic Arm Control using PID Controller. In Proceedings of the 7th International Conference on Mechatronics Engineering (ICOM), Putrajaya, Malaysia, 30–31 October 2019; pp. 5–10. [Google Scholar] [CrossRef]
- Huang, H.; Shirkhani, M.; Tavoosi, J.; Mahmoud, O. A New Intelligent Dynamic Control Method for a Class of Stochastic Nonlinear Systems. Mathematics 2022, 10, 1406. [Google Scholar] [CrossRef]
- Sun, W.; Lin, J.W.; Su, S.F.; Wang, N.; Er, M.J. Reduced Adaptive Fuzzy Decoupling Control for Lower Limb Exoskeleton. IEEE Trans. Cybern. 2021, 51, 1099–1109. [Google Scholar] [CrossRef]
- Pezzato, C.; Ferrari, R.; Corbato, C.H. A Novel Adaptive Controller for Robot Manipulators Based on Active Inference. IEEE Robot. Autom. Lett. 2020, 5, 2973–2980. [Google Scholar] [CrossRef] [Green Version]
- Tavoosi, J.; Shirkhani, M.; Abdali, A.; Mohammadzadeh, A.; Nazari, M.; Mobayen, S.; Asad, J.H.; Bartoszewicz, A. A new general type-2 fuzzy predictive scheme for PID tuning. Appl. Sci. 2021, 11, 392. [Google Scholar] [CrossRef]
- Ma, C.; Lam, J.; Lewis, F.L. Trajectory Regulating Model Reference Adaptive Controller for Robotic Systems. IEEE Trans. Control Syst. Technol. 2019, 27, 2749–2756. [Google Scholar] [CrossRef]
- Kang, S.; Chou, W. Kinematic Analysis, Simulation and Manipulating of a 5-DOF Robotic Manipulator for Service Robot. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 643–649. [Google Scholar] [CrossRef]
- Amiri, M.S.; Ramli, R. Intelligent Trajectory Tracking Behavior of a Multi-Joint Robotic Arm via Genetic–Swarm Optimization for the Inverse Kinematic Solution. Sensors 2021, 21, 3171. [Google Scholar] [CrossRef]
- Amiri, M.S.; Ramli, R.; Ibrahim, M.F. Genetically optimized parameter estimation of mathematical model for multi-joints hip–knee exoskeleton. Robot. Auton. Syst. 2020, 125, 103425. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Khooban, M.H. An Intelligent Non-Integer PID Controller-Based Deep Reinforcement Learning: Implementation and Experimental Results. IEEE Trans. Ind. Electron. 2021, 68, 3609–3618. [Google Scholar] [CrossRef]
- Amiri, M.S.; Ramli, R.; Tarmizi, M.A.A.; Ibrahim, M.F.; Danesh Narooei, K. Simulation and Control of a Six Degree of Freedom Lower Limb Exoskeleton. J. Kejuruter. 2020, 32, 197–204. [Google Scholar] [CrossRef]
- Díaz-Rodríguez, I.D.; Han, S.; Keel, L.; Bhattacharyya, S. Advanced Tuning for Ziegler-Nichols Plants. IFAC-PapersOnLine 2017, 50, 1805–1810. [Google Scholar] [CrossRef]
- Amiri, M.S.; Ramli, R.; Ibrahim, M.F. Initialized Model Reference Adaptive Control for Lower Limb Exoskeleton. IEEE Access 2019, 7, 167210–167220. [Google Scholar] [CrossRef]
- Li, X.; Yang, X. Stability analysis for nonlinear systems with state-dependent state delay. Automatica 2020, 112, 108674. [Google Scholar] [CrossRef]
- Liu, S.; Liberzon, D.; Zharnitsky, V. Almost Lyapunov functions for nonlinear systems. Automatica 2020, 113, 108758. [Google Scholar] [CrossRef]
- Afaque Khan, M.A.; Swamy, M.N. Modified MRAC based on Lyapunov theory for improved controller efficiency. In Proceedings of the International Conference on Automatic Control and Dynamic Optimization Techniques, Pune, India, 9–10 September 2016; pp. 989–995. [Google Scholar] [CrossRef]
- Aliman, N.; Ramli, R.; Haris, S.M.; Amiri, M.S.; Van, M. A robust adaptive-fuzzy-proportional-derivative controller for a rehabilitation lower limb exoskeleton. Eng. Sci. Technol. Int. J. 2022, 35, 101097. [Google Scholar] [CrossRef]
- Amiri, M.S.; Ramli, R.; Ibrahim, M.F.; Wahab, D.A.; Aliman, N. Adaptive Particle Swarm Optimization of PID Gain Tuning for Lower-Limb Human Exoskeleton in Virtual Environment. Mathematics 2020, 8, 2040. [Google Scholar] [CrossRef]
- Wu, J.; Gao, J.; Song, R.; Li, R.; Li, Y.; Jiang, L. The design and control of a 3DOF lower limb rehabilitation robot. Mechatronics 2016, 33, 13–22. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | |||||
|---|---|---|---|---|---|
| 0.3 | 0.15 | 0.748 | 0.0013 | 0.72 | |
| 0.19 | 0.095 | 0.8020 | 0.0043 | 0.83 | |
| 0.14 | 0.07 | 0.792 | 0.0023 | 0.95 | |
| 0.075 | 0.691 | 0.0015 | 0.88 | ||
| 0.02 | 0.2562 | 0.0012 | 0.83 |
| Z-N | |||
| Pettit & Carr | |||
| Chau | |||
| Bucz |
| Joint 1 | Joint 2 | Joint 3 | Joint 4 | Joint 5 | ||
|---|---|---|---|---|---|---|
| Z-N | 0.6 | 26.7 | 4.2 | 39.6 | 15 | |
| 400 | 106.8 | 5.6 | 264 | 100 | ||
| 0.0002 | 1.66 | 0.78 | 1.48 | 0.56 | ||
| Pettit & Carr | 0.67 | 29.82 | 4.69 | 44.22 | 16.75 | |
| 223.33 | 59.63 | 3.12 | 147.4 | 55.84 | ||
| 0.0003 | 2.22 | 1.05 | 1.98 | 0.75 | ||
| Chau | 0.2 | 8.9 | 1.4 | 13.2 | 5 | |
| 121.19 | 32.36 | 1.7 | 79.92 | 30.3 | ||
| 0.0002 | 1.48 | 0.69 | 1.31 | 0.5 | ||
| Bucz | 0.28 | 12.46 | 1.97 | 18.48 | 7 | |
| 64.8 | 17.3 | 1.903 | 42.8 | 16.2 | ||
| 0.0003 | 2.23 | 1.05 | 1.2 | 0.75 |
| Joint 1 | Joint 2 | Joint 3 | Joint 4 | Joint 5 | ||
|---|---|---|---|---|---|---|
| Z-N | AE | 0.003 | 0.011 | 0.038 | 0.01 | 0.015 |
| ST | 0.1 | 0.3 | 2.3 | 0.4 | 0.6 | |
| Pettit and Carr | AE | 0.009 | 0.013 | 0.064 | 0.011 | 0.016 |
| ST | 0.11 | 0.9 | 4.8 | 0.5 | 0.8 | |
| Chau | AE | 0.004 | 0.019 | 0.114 | 0.016 | 0.028 |
| ST | 0.13 | 0.8 | 5 | 0.8 | 1.6 | |
| Bucz | AE | 0.008 | 0.03 | 0.102 | 0.014 | 0.023 |
| ST | 0.115 | 2.12 | 5.1 | 0.9 | 1.5 | |
| Joint 1 | Joint 2 | Joint 3 | Joint 4 | Joint 5 | |
|---|---|---|---|---|---|
| AE | 0.0193 | 0.022 | 0.0215 | 0.0217 | 0.0228 |
| RMS | 0.0215 | 0.025 | 0.0239 | 0.0241 | 0.0254 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amiri, M.S.; Ramli, R. Utilisation of Initialised Observation Scheme for Multi-Joint Robotic Arm in Lyapunov-Based Adaptive Control Strategy. Mathematics 2022, 10, 3126. https://doi.org/10.3390/math10173126
Amiri MS, Ramli R. Utilisation of Initialised Observation Scheme for Multi-Joint Robotic Arm in Lyapunov-Based Adaptive Control Strategy. Mathematics. 2022; 10(17):3126. https://doi.org/10.3390/math10173126
Chicago/Turabian StyleAmiri, Mohammad Soleimani, and Rizauddin Ramli. 2022. "Utilisation of Initialised Observation Scheme for Multi-Joint Robotic Arm in Lyapunov-Based Adaptive Control Strategy" Mathematics 10, no. 17: 3126. https://doi.org/10.3390/math10173126
APA StyleAmiri, M. S., & Ramli, R. (2022). Utilisation of Initialised Observation Scheme for Multi-Joint Robotic Arm in Lyapunov-Based Adaptive Control Strategy. Mathematics, 10(17), 3126. https://doi.org/10.3390/math10173126