1. Introduction
Control problems play an important role in modern scientific research. Data-driven control and fuzzy control problems for both linear and nonlinear system remain a popular task, and many theoretical researches have been carried out, such as Virtual Reference Feedback Tuning (VRFT) [
1] and indirect adaptive iterative learning control (iAILC) scheme [
2]. Formation control is one of the significant interest topics in the research of multi-agent system (MAS). Formation control can be realized by using various types of vehicles, such as unmanned aerial vehicles, mobile robots, underwater vehicles and so on. It has found a wide range of applications including military, aerospace, industry, etc.
The research of formation control mainly includes the following aspects: formation generation, formation maintenance, formation switching, formation avoidance and formation adaptive problems. The approaches to formation control are roughly categorized as leader-follower [
3,
4,
5,
6], behavioral [
7,
8], virtual structure [
9,
10] and artificial potential field [
11,
12].
Generally speaking, the collision avoidance problem in formation control includes two aspects. On the one hand, the members of MAS should avoid collision with each other in the process of motion. On the other hand, MAS should avoid collision with obstacles. A lot of research has been done in the field of obstacle avoidance algorithm. Many of them are based on artificial potential field [
13,
14]. Sometimes the control is realized with genetic algorithms (GA) [
15], which is a powerful tool based on models of natural selection and evolution and allow an exhaustive search over large spaces. In [
16] a visibility graph approach is used, while in [
17] collision avoidance is achieved using A-Star algorithm.
In [
18], Kurzhanski presents a theoretical framework of formation control approach for MAS based on the virtual ellipsoidal motions. This motion is achieved by means of a virtual ellipsoidal container inside which the members are assumed to be a sphere with safety volume. Kurzhanski considers the motions of MAS within the container so that the motions reach the target set together with the virtual container containing them. Therefore, his work considers about moving to the target set while avoiding collisions. In light of the above discussion, the motions of virtual ellipsoids can be fully portrayed by the linear differential equation satisfied with the coordinates of the center and the configuration matrix. Kurzhanski proposes the motion trajectory of virtual ellipsoid and MAS based on a suitable value function and dynamic programming method, thereby giving a solution scheme for MAS. Kurzhanski’s related work can be found in the literature [
19,
20,
21,
22,
23,
24,
25,
26].
In fact, we can regard Kurzhanski’s approach to formation control of MAS based on virtual ellipsoid as an improvement of virtual structure method. Traditional virtual structure views the formation of MAS as virtual rigid structure, in which each intelligent tracks a fixed virtual point motion on a rigid structure. This rigid structure limits on the application range of the method. While the formation control approach based on virtual ellipsoid motion not only inherits the advantage that it is easy to describe system behavior as a whole and can obtain higher-cell control accuracy from traditional virtual structures, but also fully compensates for the defects of rigid motion in traditional virtual structures.
Based on the work of Kurzhanski, this paper achieves the optimal target control problem based on virtual ellipsoid. This means that we should obtain optimal controls for the ellipsoid center and configuration matrix, which is significantly different from the traditional virtual structure method. Then, taking the actual situation of obstacle avoidance for formation control into account, we present the integration of virtual ellipsoid volume constraint, ellipsoid center constraint and configuration constraint into value function. Thereby we achieve optimal control to ellipsoid. Finally, we verify the effectiveness of our method by numerical simulations.
2. Statement of the Problem
We start this section with the definition of an ellipsoid in .
Definition 1 ([
22])
. A nondegenerate ellipsoid in with center and configuration matrix is the setwhere is positive definite. Here denotes inner product of two vector and is the inverse matrix of . On the time interval
, consider the virtual ellipsoidal motions of type
with
and positive definite matrix function
which are continuous at time
.
is referred as an ellipsoidal tube.
Now consider an ellipsoidal tube
with the following systems [
23]:
where
controls the trajectory of
and
controls the configuration matrix
. The matrix parameters
,
,
,
are assumed to be continuously differentiable at time
, and
is symmetric matrix. Here the prime of a matrix stands for the transposition of the matrix. The solvable conditions of system (1) and (2) have been discussed in [
22] and
Appendix B.
Next the used control constraint, geometric constraints, barrier constraint for the systems (1) and (2) are stated and the main problem is explained.
2.1. Control Constraint
Assume the admissible control sets to be
and
, where
and
are given compact convex sets. For any control
and
, we have
where the constant
. Here
denotes the inner product of two matrices.
2.2. State Constraints
Systems (1) and (2) are also considered under the additional state constraints
where constants
. Note that inequality (4) defines a convex constraint, and inequality (5) defines a constraint complementary to a convex one. These inequalities restrict the possible size of an ellipsoid with configuration matrix
. Condition
implies that
is contained in a ball with a radius of
and condition
implies that
contains a ball with a radius of
.
2.3. Barrier Constraint
In this paper, obstacles are also regarded as virtual ellipsoids. Let the static ellipsoid
be fixed obstacle on the path of the ellipsoid motion, where
is the center and
is the configuration matrix which is positive definite. Let the eigenvalues of
be
, where
. Denote
where
is the radius of the smallest n-dimensional ball that includes
. While moving,
has to avoid obstacle
. We realize a motion under collision avoidance by keeping the distance between the
and obstacle
. Actually, we only limit the distance between
and
to be greater than
. Letting
, we have
2.4. Main Problem
With the ellipsoid
being the target state, where
is center,
is configuration matrix and positive definite. Let the target set
be given in the form of a neighborhood of the ellipsoid
.
This paper deals with the control problem of ellipsoid motion. The control objective in this paper is to drive the system to arrive at the target set, with the collision avoidance. By summarizing the above descriptions, we formulate the solution for systems and as follows.
Problem 1. Given equation systems and on an interval , let an initial state be , therefore we get the initial ellipsoid . Find feedback controls and that transfer the ellipsoid from the state into terminal set under the constraints (3)–(6).
In order to find the optimal feedback controls
and
of problem, we define the objective function
where constants
are referred to as weight coefficients.
In this paper, we use the distance between the ellipsoid and the obstacle to constrain the objective function, in which the movement of the ellipsoid is restricted by term to realize collision avoidance.
3. Solutions Developed
In this section, we use dynamic programming method to solve the above-mentioned optimal control problem. The value function defined on the trajectories of systems (1) and (2) is
For fixed
, we obtain ([
24])
where
is the backward reach set relative to
under the constraints (3)–(6), i.e., the set of points
for which there exist controls
and
that steers
to
under the constraints (3)–(6). The value function for this problem is
over all
. The meanings of the parameters have been listed in the
Table 1 below.
We can substitute the weight coefficients of this problem into value function to obtain the corresponding control. The obtained solutions will depend on .
Solving this problem is equivalent to minimizing this value function
For the convenience of calculation, we rewrite the system
in vector form [
25]. Let
, introducing the notation
Let
, the Kronecker product of matrices is denoted as
Using the identity
, then system
can be rewritten as
Denoting
,
, we obtain the relation
Then the value function can be replaced by the form
Then function
derives a solution to the HJB equation ([
27])
with the boundary condition
The solution to Equation
is given as Equation
. Denoting
Then Equation
is equivalent to
First, we have the partial derivative of
with respect to
and
Substituting
,
into
, Equation
can be rewritten as
The resulting expression is a quadratic form in the state coordinates and the spatial derivatives of the value function. The latter permits one to seek the value function in quadratic form as well,
the above equation is equivalent to (16)
where
and
are symmetric positive definite,
,
. We have the partial derivative of function
with respect to
,
and
Equations
and
can be rewritten as
By substituting Equation
into Equations
and
, we thereby obtain equations for the parameters of the form
, such as
Under the condition of continuous differentiability of the matrix parameters of the systems and , the functions and have a unique classical solution. We have thereby proved the following assertion.
Theorem 1. The value function in which the parameters are determined by systems specifies a solution to Problem 1. In this case, the optimal controls and are given by and .
Since the above formulas involve nonlinear terms, it is difficult for us to obtain analytical expressions even for this relatively simple model, so we focus on numerical solutions. In a similar way as [
26], forward Explicit Euler method (in reverse time) is introduced to perform numerical discretization, and the ellipsoid trajectory tube is obtained by MATLAB software. The corresponding implemented algorithm has been attached in
Appendix A.
4. Numerical Simulation
In order to verify the control method of collision avoidance proposed in this paper, numerical simulation results are presented in this section. The simulation includes two cases: the presence of obstacle constraint and the absence of obstacle constraint.
Consider the following parameters of the dynamics
and
of the center and the configuration matrix for a solution that uses Equation
.
The center and the configuration matrix of the target ellipse are given as
The center and the configuration matrix of the obstacle are described as
Now we choose the parameters of Equations (3)–(7) as follows
Omitting the presence of obstacle constraint, we consider Equation
with the parameters specified as
Considering the presence of obstacle constraint, the parameters in Equation
are defined as follows
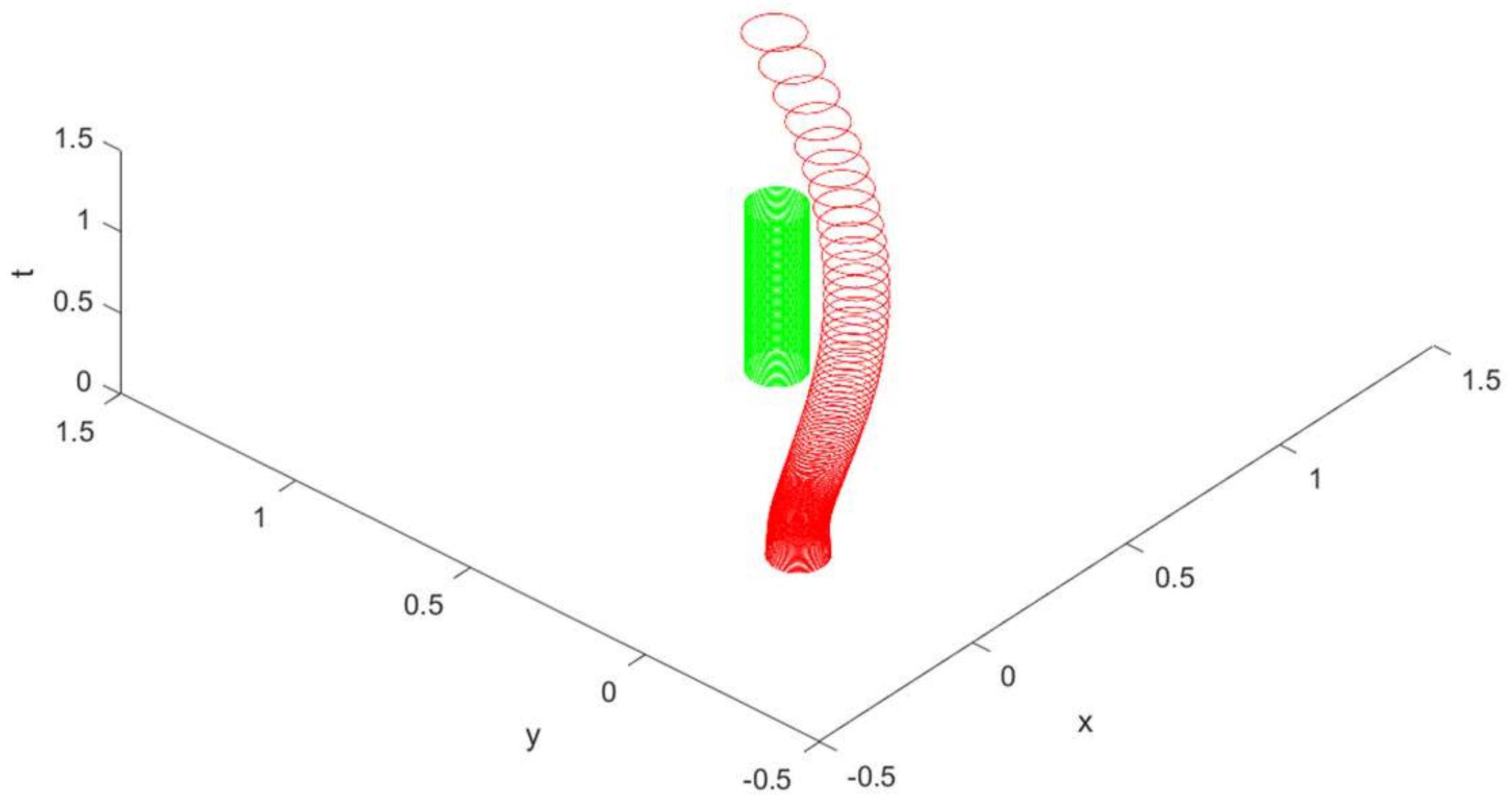
The elliptical tubes of trajectories without regard of the obstacle constraints are shown in
Figure 1, and the elliptical tubes of trajectories with regard of the obstacle constraints are shown in
Figure 2, where the vertical trajectories tube is the obstacle, and the curved trajectories tube is
. It can be seen from the simulation results in
Figure 1 and
Figure 2 that when obstacle constraint is not considered,
cannot avoid the obstacle. When considering obstacle constraint,
can avoid the obstacle.
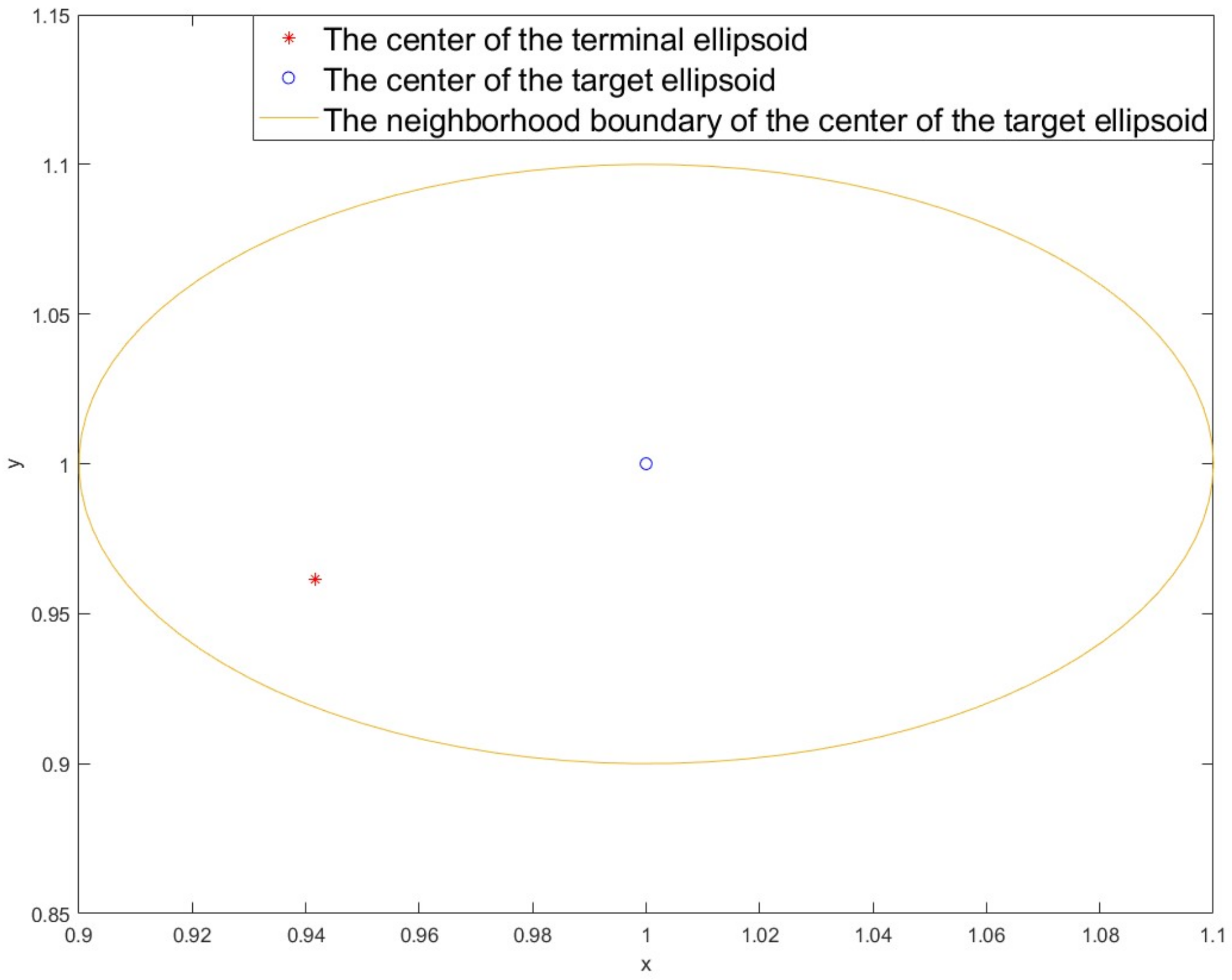
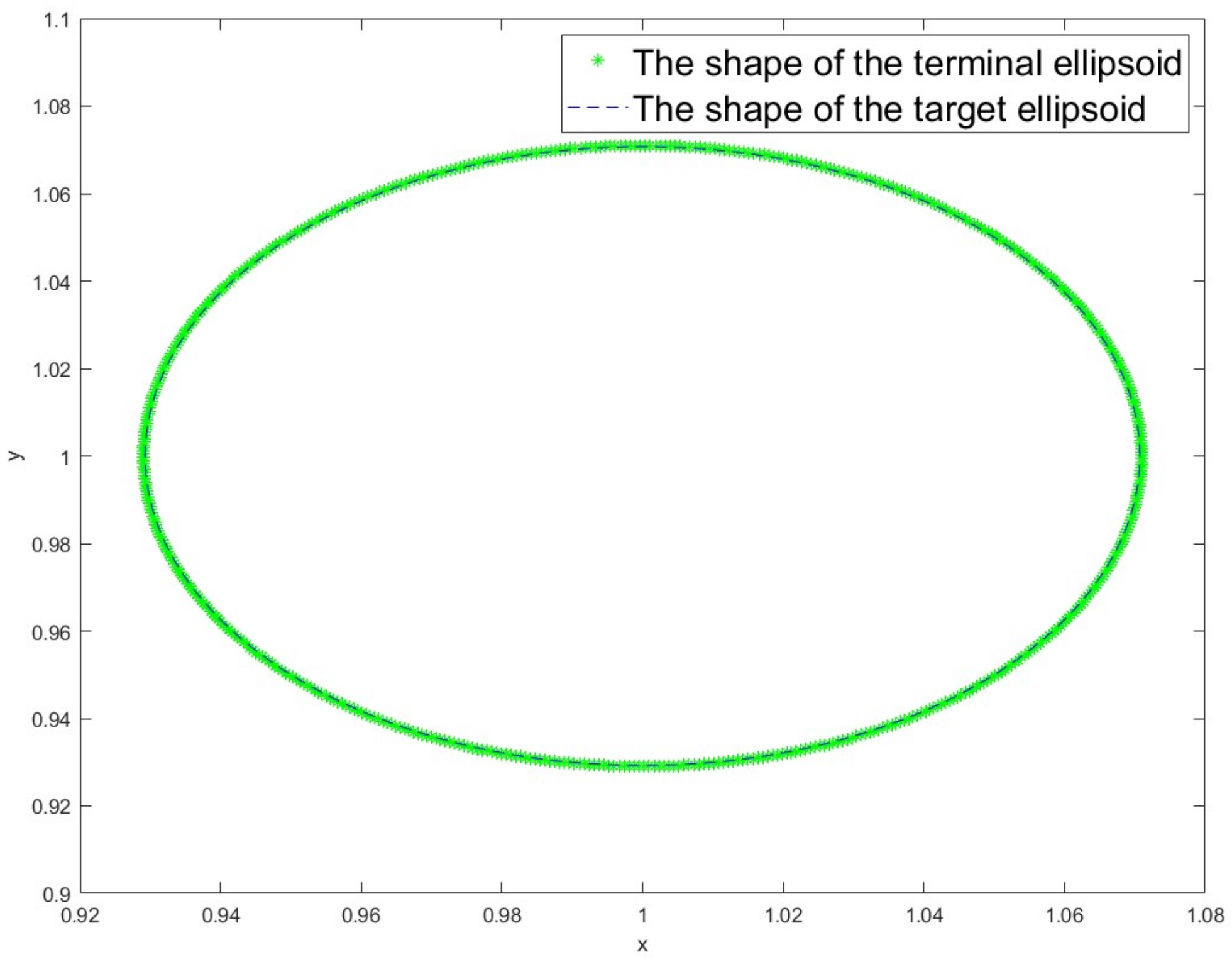
The comparison diagram of the terminal ellipse and the target ellipse without obstacle constraint and with obstacle constraint are given. The simulation results are provided in
Supplementary Materials and shown in
Figure 3,
Figure 4 and
Figure 5. In
Figure 3, the center of
reaches the target set without obstacle constraint. In
Figure 4, the center of
reaches the target set with obstacle constraint. In
Figure 5, the configuration matrix
reaches the target set with or without obstacle constraint.
5. Conclusions
This paper studies the collision avoidance problem in formation control and presents a solution to realize collision avoidance based on dynamic programming. By introducing a barrier constraint into the value function, we obtain the optimal controls on the virtual ellipsoid to pass through the obstacle. For the three-dimensional case of a virtual ellipsoid, the method using this article can obtain similar results.
Our work focuses on a situation with static obstacles. This framework is flexible and extensible, and the results of collision avoidance are stable. Meanwhile, several limitations remain to be studied in the future. For example, the current algorithm has not yet achieved parallel computing and still needs to be improved. Additionally, when the obstacle is movable or when actively interfering movement towards the virtual ellipsoid is considered, the target control problem will be converted to a kind of complex game problem which will be studied in the future.
Supplementary Materials
The following supporting information can be downloaded at:
https://www.mdpi.com/article/10.3390/math10193478/s1, Txt S1: Value of center q on time interval [0, 1] step 0.01.txt, Txt S2: Value of configuration matrix Q on time interval [0, 1] step 0.01.txt, Txt S3: Value of control u on time interval [0, 1] step 0.01.txt, Txt S4: Value of control bar{U} on time interval [0, 1] step 0.01.txt.
Author Contributions
Conceptualization, S.G.; Methodology, S.G., L.J., Z.D. (Zhaopeng Dai) and Y.Y.; Software, A.S. and Z.D. (Zhiqing Dang); Formal analysis, Z.Y., J.G. and Y.S.; Validation, S.G. and H.G.; Writing—original draft preparation, S.G.; Writing—review and editing, S.G., L.J., Z.D. (Zhaopeng Dai) and Y.Y.; Supervision, H.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the National Natural Science Foundation of China (No. 72171126, 11872220).
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
| Algorithm A1. Numerical Solutions for Theorem 1. |
Require: The total time interval , the number of time step , the initial center and configuration matrix , the target center and configuration matrix , and the obstacle center and configuration matrix for the ellipsoid. The coefficients of dynamic formulae depending on the system, and Practitioner designed coefficients .
Ensure: The optimal controls for the center and for the configuration matrix of the ellipsoid which allow to move to the target without collision with , and the center , configuration matrix of . The above solution was given at the following time node: , where .
%Solving in Equation (18) using forward Explicit Euler Method in reverse time.
1:
;
2: for {
;
;
;
;
}
%Solving using equation (16) and (17), and solving using Equations (1) and (2) in the same loop.
3: ;
4: for {
;
;
;
;
} |
Appendix B. Solvability Analysis
Discussion about the solvability of system provided by Equations (1) and (2) are provided in this appendix. In the view of formation control, Equations (1) and (2) form a coupled system that should not be analyzed separately. Thus, we introduce the concept of Ellipsoidal Dynamics with notations in reference [
22] that make our demonstration theoretical and concise. Several definitions below have already been given in [
22] and without special notation we omit the name of this book and only mark the corresponding content with page number.
First, we rewrite Equations (1) and (2) into an Attainable Domain (Definition 1.2.1 Page 9 in [
22]) Equation:
where
,
denotes the ellipsoid constructed by an eligible control, and by Equation (3) it forms an ellipsoid (actually it is a sphere with isotropy) with the center as origin. The + and integral sign in Equation (A1) denotes Ellipsoid Sum and Integral, defined on Pages (128) and (161) in [
22], respectively.
Next, by carrying out the similar procedure from Section 3.1 (on Page 178) to 3.4 (on Page 194) in [
22], Corresponding Theorem 3.4.1 (on Page 195) in [
22] holds for our system, which implies a condition for solvability. We transform this conclusion with our notation as below.
Theorem A1. must hold for every , where and denotes the ellipsoid evolution (Definition 3.3.1 on Page 191 and Definition 3.3.2 on Page 193) carried out by internal or external calculation, respectively, and denotes the Solvable Domain (Definition 1.4.2 on Page 19 in [22]), which iswhere the denotes Ellipsoid difference as defined on Page (128) in [22]. From Theorem A1, we could check whether Equations (1) and (2) is solvable by checking whether
holds for the given dynamic system with corresponding coefficients.
References
- Roman, R.-C.; Precup, R.-E.; Petriu, E.M. Hybrid Data-Driven Fuzzy Active Disturbance Rejection Control for Tower Crane Systems. Eur. J. Control 2021, 58, 373–387. [Google Scholar] [CrossRef]
- Chi, R.; Li, H.; Shen, D.; Hou, Z.; Huang, B. Enhanced P-type Control: Indirect Adaptive Learning from Set-point Updates. IEEE Trans. Automat. Control 2022, 665–669. [Google Scholar] [CrossRef]
- Gustavi, T.; Hu, X.M. Observer-based leader-following formation control using onboard sensor information. IEEE Trans. Robot. 2008, 24, 1457–1462. [Google Scholar] [CrossRef]
- Mariottini, G.L.; Morbidi, F.; Prattichizzo, D.; Valk, N.V.; Michael, N.; Pappas, G.; Daniilidis, K. Vision-based localization for leader-follower formation control. IEEE Trans. Robot. 2009, 25, 1431–1438. [Google Scholar] [CrossRef]
- Chen, X.; Yan, P.; Serrani, A. On input-to-state stability-based design for leader/follower formation control with measurement delays. Int. J. Robust Nonlin. 2013, 23, 1433–1455. [Google Scholar] [CrossRef]
- Panagou, D.; Kumar, V. Cooperative visibility maintenance for leader-follower formations in obstacle environments. IEEE Trans. Robot. 2014, 30, 831–844. [Google Scholar] [CrossRef]
- Kownacki, C. Multi-UAV flight using virtual structure combined with behavioral approach. Acta Mech. Autom. 2016, 10, 92–99. [Google Scholar] [CrossRef]
- Antonelli, G.; Arrichiello, F.; Chiaverini, S. Experiments of formation control with multirobot systems using the null-space-based behavioral control. IEEE. Trans. Control Syst. Technol. 2009, 17, 1173–1182. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W. Decentralized scheme for spacecraft formation flying via the virtual structure approach. J. Guid. Control. Dynam. 2004, 27, 73–82. [Google Scholar] [CrossRef]
- Sadowska, A.; den Broek, T.V.; Huijberts, H.; van deWouw, N.; Kostić, D.; Nijmeijer, H. A virtual structure approach to formation control of unicycle mobile robots using mutual coupling. Int. J. Control 2011, 84, 1886–1902. [Google Scholar] [CrossRef]
- Gazi, V. Swarm aggregations using artificial potentials and sliding-mode control. IEEE Trans. Robot. 2005, 21, 1208–1214. [Google Scholar] [CrossRef]
- Mabrouk, M.; McInnes, C. Solving the potential field local minimum problem using internal agent states. Robot. Auton. Syst. 2008, 56, 1050–1060. [Google Scholar] [CrossRef]
- Zhang, J.L.; Yan, J.G.; Zhang, P. Fixed-wing UAV formation control design with collision avoidance based on an improved artificial potential field. IEEE. Access 2018, 6, 78342–78351. [Google Scholar] [CrossRef]
- Xie, L.; Liu, S. Dynamic obstacle-avoiding motion planning for manipulator based on improved artificial potential filed. IET Control Theory A 2018, 35, 1239–1249. [Google Scholar]
- Jiang, A.; Yao, X.; Zhou, J. Research on path planning of real-time obstacle avoidance of mechanical arm based on genetic algorithm. J. Eng. 2018, 16, 1579–1586. [Google Scholar] [CrossRef]
- Li, S.L.; He, J.H.; Ao, H.Y.; Liu, Y.B. Intelligent visibility graph algorithm of Mars aircraft based on pigeon-inspired optimization. Flight. Dyn. 2020, 38, 90–94. [Google Scholar]
- Chen, G.R.; Guo, S.; Wang, J.Z.; Qu, H.B.; Chen, Y.Q.; Hou, B.W. Convex optimization and A-star algorithm combined path planning and obstacle avoidance algorithm. J. Control Decis. 2020, 35, 2907–2914. [Google Scholar]
- Kurzhanski, A.B. Problem of collision avoidance for a team motion with obstacles. Proc. Steklov Inst. Math. 2016, 293, 120–136. [Google Scholar] [CrossRef]
- Kurzhanski, A.B.; Mitchell, I.M.; Araiya, P.V. Optimization techniques for state-constrained control and obstacle problems. J. Optim. Theory Appl. 2006, 128, 499–521. [Google Scholar] [CrossRef]
- Kurzhanski, A.B. The problem of measurement feedback control. J. Appl. Math. Mech. 2004, 68, 487–501. [Google Scholar] [CrossRef]
- Komarov, Y.; Kurzhanski, A.B. Minimax-maximin relations for the problem of vector-valued criteria optimization. Dokl. Math. 2020, 101, 259–261. [Google Scholar] [CrossRef]
- Kurzhanski, A.B.; Valyi, I. Ellipsoidal Calculus for Estimation and Control; Springer: Berlin/Heidelberg, Germany, 1997. [Google Scholar]
- Kurzhanski, A.B. On the problem of control for ellipsoidal motions. Proc. Steklov Inst. Math. 2012, 277, 160–169. [Google Scholar] [CrossRef]
- Kurzhanski, A.B. On a team control problem under obstacles. Proc. Steklov Inst. Math. 2015, 51, 128–142. [Google Scholar] [CrossRef]
- Kurzhanski, A.B.; Mesyats, A.I. Optimal control of ellipsoidal motions. Differ. Equ. 2012, 48, 1502–1509. [Google Scholar] [CrossRef]
- Kurzhanski, A.B.; Mesyats, A.I. Control of ellipsoidal trajectories: Theory and numerical results. Comput. Math. Math. Phys. 2014, 54, 418–428. [Google Scholar] [CrossRef]
- Dockner, E.J.; Jorgensen, S.; Long, N.V.; Sorger, G. Differential Games in Economics and Management Science, 1st ed.; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}