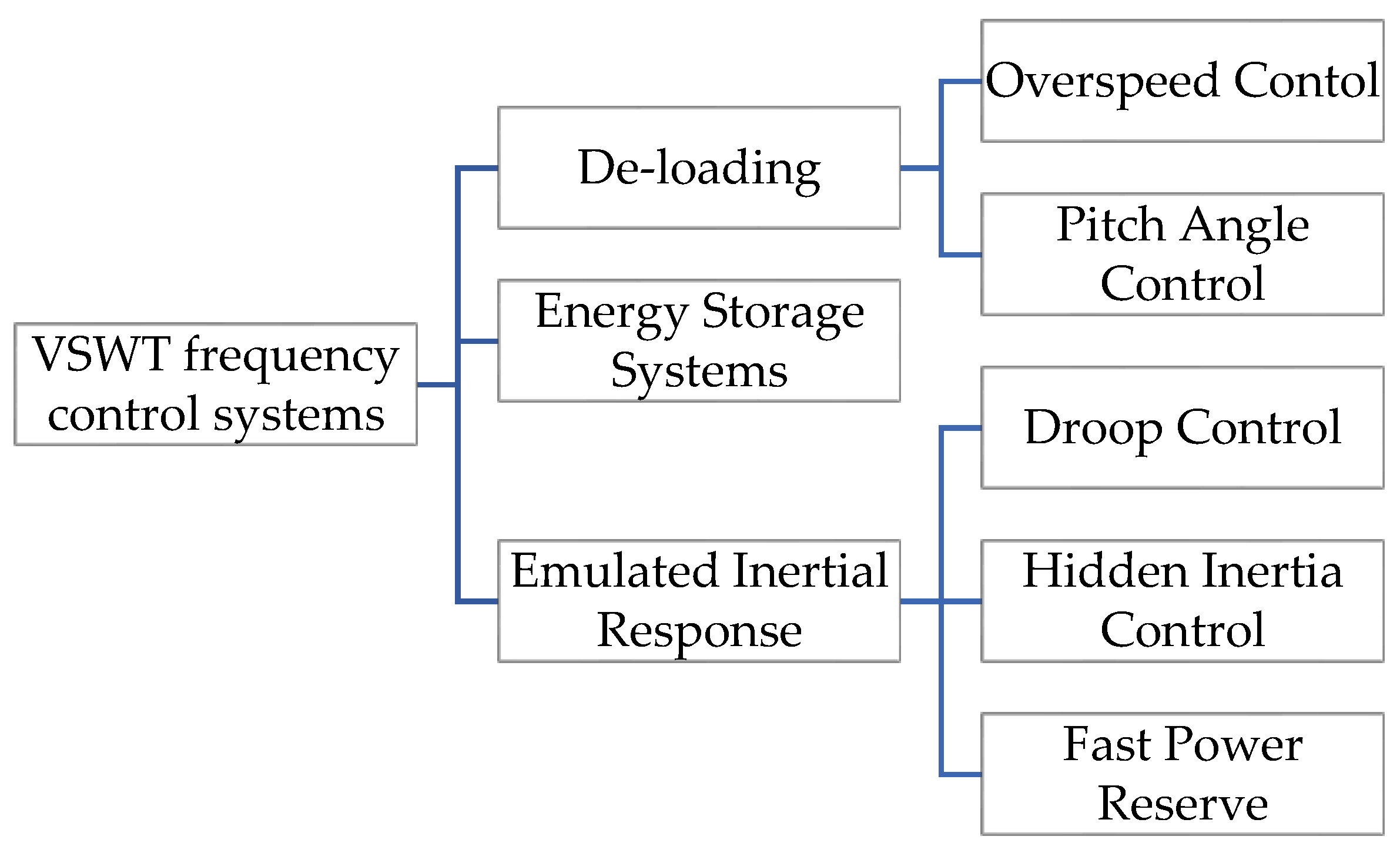
3.1.1. De-Loading
Wind turbines operate along an MPPT curve to extract the maximum energy from the wind. However, operating along this MPPT curve leaves no additional power reserve for frequency support [
17]. To provide additional power reserve for frequency support, a de-loading control system can be implemented. A de-loading control system operates a WTG at a suboptimal point, where the WTG deviates from the MPPT curve to provide additional active power for grid frequency support functions [
18]. There are two different methods to implement de-loading, namely overspeed control and pitch angle control [
17]. A summary of the papers classified as de-loading control, grouped by research area, is shown in
Table 2.
The paper [
19] evaluates pitch de-loading, kinetic energy recovery and WTG over-speeding, which enable WTGs to provide short-term frequency support, from an electrical and mechanical perspective. The authors found that WTG overspeeding showed a faster response to a frequency event, accompanied by a higher initial power surge, while pitch de-loading provided a more sustainable support followed by a smoother recovery. WTG overspeeding could have implications on the mechanical stability of the WTG; however, the method wasted less energy when compared to pitch de-loading. An important aspect of kinetic energy recovery is that it does not deviate from the MPPT curve at normal operation. However, the system is most likely to suffer a second frequency dip as the rotors of the WTGs recover to the nominal rotor speed. The simulation environment used was MATLAB/Simulink.
The paper [
20] presents an analytical model for short-term grid frequency report to evaluate the contribution of inertial and droop responses from a wind farm. The available mechanical power of a VSWT was approximated by a second-order polynomial which quantified the kinetic energy and wind power reserve over a wide range of operating points. Since the VSWT operating characteristics and conditions were now quantified, the frequency controller gains could be adjusted accordingly, thereby ensuring stable performance of the wind farm during frequency transients. To stimulate the frequency response of a wind farm during wind power fluctuations, a modified system frequency response model which considered the inertial and droop responses was developed. The efficacy of the model was verified by comparisons of the results with those obtained empirically.
Two virtual inertia control schemes, an equation-based scheme and an adaptive fuzzy logic-based scheme, are proposed in [
21]. The proposed control schemes dynamically modulate the gains of the inertia control schemes based on system events to improve the primary frequency response of the WECS. The efficacy of the proposed schemes was validated in MATLAB/Simulink, while additional hardware-in-the-loop simulations on the OPAL-RT real-time simulator platform were presented to further substantiate the proposed schemes. It was concluded that the adaptive fuzzy logic-based scheme provided better frequency regulation when compared to the dynamic equation-based scheme.
The paper [
22] proposes an active power control scheme which enables DFIGs (doubly fed induction generators) to partake in grid frequency support. Herein, a power surge-based co-ordination strategy provides an inertial response, while a power reserve control method assists with primary frequency control. The DFIG is, therefore, designed to provide both inertial and primary frequency support by adjusting the reserve amount whilst considering under- and over-frequency events. The effectiveness of this proposed control scheme was validated through case studies on a 181-bus WECC system with 50% wind penetration. The paper concludes by stating that future work will see the inclusion of secondary frequency control within the control scheme, which will make use of a co-ordinated strategy between DFIGs and conventional synchronous generators.
A droop control scheme for WTGs that uses rotor speed control for frequency support is proposed in [
23]. The proposed control scheme does not add frequency-droop control signals to the WTG’s power reference, but instead relies on the method of power tracking by adjusting the wind turbine’s power tracking curve for primary frequency regulation. The efficacy of the proposed control scheme was validated through simulations in DIgSILENT Power Factory on a modified IEEE 39-bus power system. The results showed that the proposed scheme produces a linear frequency-droop response independent of the power tracking method used. This is an improvement over conventional frequency-droop controllers whose frequency-regulating responses are dependent on the method of power tracking used.
In [
24], the authors propose an optimisation function which determines the operating point of de-loaded WTGs to reduce the magnitude of speed deviation and settling time caused by the inertial response and participation in frequency control. The optimisation function was integrated into a combined inertial and frequency control strategy for type-4 (fully rated power converter) WTGs, based on the concept of a virtual synchronous generator. The paper presents an analysis of the impact of the inertial response and frequency control on the dynamics of VSWTs. The results showed that the kinetic energy and mechanical energy variations in the WTG depend on its operating point. The control strategy and optimisation process were evaluated by non-linear time-domain simulations using the ODE23tb solver in MATLAB. The validation of the optimisation function included wind speed and load variations.
In [
25], an integrated controller to provide both an inertial response and primary frequency regulation is proposed. More specifically, this includes a de-loaded pitch control system, which is proposed alongside an optimised MPPT controller to reserve capacity for frequency regulation and provide an inertial response while under de-loaded operation. The de-loading controller can estimate the proper pitch angle or regulate the tip ratio to attain the required de-loading. Under the de-loading option, the MPPT controller will switch from the MPPT curve to a virtual inertial control curve depending on the frequency variation. In this way, the WTG may provide frequency support to the grid by shifting its active power reference.
The authors in [
26] present a method which estimates the grid frequency response as a result of a generator tripping. This method applies to both conventional synchronous machines and wind turbine generators for grid frequency support. In this way, system operators can continuously evaluate the inertia and headroom produced and adjust the amount of WTG inertia and active power control required for reliable system operation accordingly. The authors’ full proposed model was validated by simulation on PSS/E. As concluded by the authors, determining the optimal amount of WTG inertia and active power support from conventional synchronous generators will be the focus of their future work.
The authors in [
27] present a co-ordinated, distributed control scheme which allows offshore wind power plants (WPPs), connected through an HVDC system, to support the primary frequency control efforts of AC grids on land. The control scheme is designed to account for AC areas and WPPs which may be operated by different operators. In addition, the control scheme considers the limited power reserve of the wind turbine generators in the WPPs and will adjust accordingly to maintain a suitable frequency regulation. In the case of a large change in the power demand, the control scheme will permit all stations to share their power reserves so that the frequency in the AC areas converges to the nominal frequency. Small changes to the power demand result in the control scheme restoring the frequency in the AC areas to the nominal frequency value. This control scheme was validated through transient simulations in a modified version of Cigré DC grid benchmark, which included a five-terminal HVDC grid, comprised of two WPPs and three AC networks. MATLAB/SimPowerSystem was the simulation environment used in this paper.
A dynamic de-loading control scheme for a DFIG to provide additional active power for grid frequency support is proposed in [
28]. The proposed control scheme co-ordinates the rotor acceleration control and pitch angle control while considering the frequency regulation demands of the grid and the prediction error of wind power. This control scheme was simulated in MATLAB. The results show that despite a small amount of wind abandonment, this control scheme can provide frequency support to the grid and mitigate the secondary frequency drop following frequency regulation.
3.1.2. Energy Storage Systems
Energy storage systems can partake in frequency regulation and work with WTGs to improve the system inertia or augment the frequency response of WTGs [
17]. Specifically, in the context of frequency regulation, energy storage systems can mitigate the secondary frequency drop of WTGs during the rotor recovery phase of the WTG [
17]. A summary of the papers classified as regarding ESS is shown in
Table 3.
The authors in [
15] propose a strategy that provides better performance of temporary frequency support and addresses the problem of system frequency oscillation and secondary frequency drop. The solution is based on a co-ordinated control of WTGs in conjunction with an energy storage system (ESS). The proposed strategy was simulated on PSCAD/EMTDC to verify its effectiveness. The authors concluded that a secondary frequency drop may be avoided by an ESS rated to only 10% of the WTG.
A specified-time consensus (STC) control for ESS-assisted DFIG WTGs to assist in frequency regulation is proposed in [
29]. The efficacy of the proposed control scheme is validated by simulations conducted in MATLAB/Simulink. The results showed that the proposed strategy can provide a smooth power output of the WTG and improve the frequency regulation capability.
The paper [
30] presents a hybrid operation strategy for a WECS using an ESS for grid frequency support. This operating strategy provides a reserve power margin by de-loaded operation in addition to relying on the kinetic energy of the rotor. The ESS is used concurrently with the kinetic energy discharge to provide additional energy to the grid during a frequency deviation. Furthermore, the ESS is used to maintain the power balance between generation and consumption, thereby mitigating the stochastic nature of wind. The effectiveness of the proposed hybrid operation strategy was verified using PSCAD/EMTDC.
In [
31], an algorithm is proposed to integrate hydro-electric pumped storage (HEPS) station with WECS, providing grid frequency support. This strategy embeds the idea that excess energy from the WECS is stored in a HEPS, providing energy during frequency drops. The major benefit in this is that the WTG will always follow its MPPT curve since no frequency support methods are applied to the WTG allowing for deviation. This ensures that the maximum energy will always be extracted from the wind. The major HEPS aspects of this system were estimated, while case studies examined the impact of the algorithm on frequency recovery at 40% wind power penetration. The simulation environment used was MATLAB/Simulink.
A co-operative control strategy of a WECS and compressed air energy storage for frequency regulation is proposed in [
32]. The effectiveness of the proposed co-ordinated control strategy was evaluated under various scenarios and load profiles using MATLAB/Simulink simulations.
The authors in [
33] present an embedded solution that uses a hierarchal controller on a microgrid comprising wind turbines and battery units. In this way, the solution provides a co-ordinated frequency support to a weak grid by adjusting the active power flow through the tie-line in accordance with grid frequency requirements. To deal with the interactions between the impedance of the weak grid and output impedance of the microgrid, a stability analysis model was developed. This proposed approach was validated through simulation using MATLAB/SimPowerSystem toolbox.
The paper [
34] proposes a multilevel embedded ESS consisting of super-capacitors and lead–acid batteries inside a PMSG (permanent magnet synchronous generator) to provide frequency support. The super-capacitors are used to emulate an inertial response while the lead–acid batteries are used to provide the primary frequency response. The secondary frequency response is provided by the mechanical power reserved in the wind turbine by using a suboptimal MPPT strategy. In addition, a supplementary control strategy is proposed, which makes use of the super-capacitors and lead–acid batteries to provide a primary and secondary frequency response, respectively. Simulations were performed using MATLAB/SimPowerSystem and laboratory tests were conducted to validate the effectiveness of the proposed control strategy. By utilising the complimentary characteristics of lead–acid batteries and super-capacitors, the solution eliminates frequent cycling of the lead–acid batteries while also relieving mechanical stress from WECS due to abrupt electromagnetic changes when partaking in frequency regulation.
An inertial response control scheme with a super-capacitor ESS is proposed in [
35]. The inertial response is designed using the generator torque limits. The energy released from the ESS is used to augment the active power deficit during the recovery process of the turbine rotor. In addition, a damping controller is added to the inertial control to suppress mechanical oscillations in the shaft and tower of the turbine during frequency support. The mechanical system of the wind turbine generator is modelled and simulated using FAST by the NREL, whilst the electrical system of the wind turbine generator is developed in MATLAB/Simulink. The simulation results show that the proposed method can improve the frequency nadir, mitigate the secondary frequency dip and reduce the magnitude in the mechanical subsystem.
To mitigate the impact of the wake effect in grid frequency support, the paper [
36] proposes an optimal ESS allocation (OEA) scheme for DFIG-based wind turbines. To realise the OEA scheme, wind turbines are placed in a cluster, considering their received wind speed. Each wind turbine within a cluster will share the same ESS. The OEA scheme tries to optimise the coherency of all the clusters’ frequency support margins so that all wind turbines maintain the same frequency stability. In the OEA scheme, the ESSs do not directly provide frequency support services to the grid, rather, they serve to improve the wind turbine’s frequency support capability and the system security. In this implementation, the required capacity of the ESSs need not be so large as in the case of when ESSs directly provide frequency support, thereby reducing the level of investment needed to deploy an ESS. The effectiveness of the OEA is verified by simulation studies conducted on a modified 29-bus Hydro-Quebec transmission system with one DFIG wind farm.
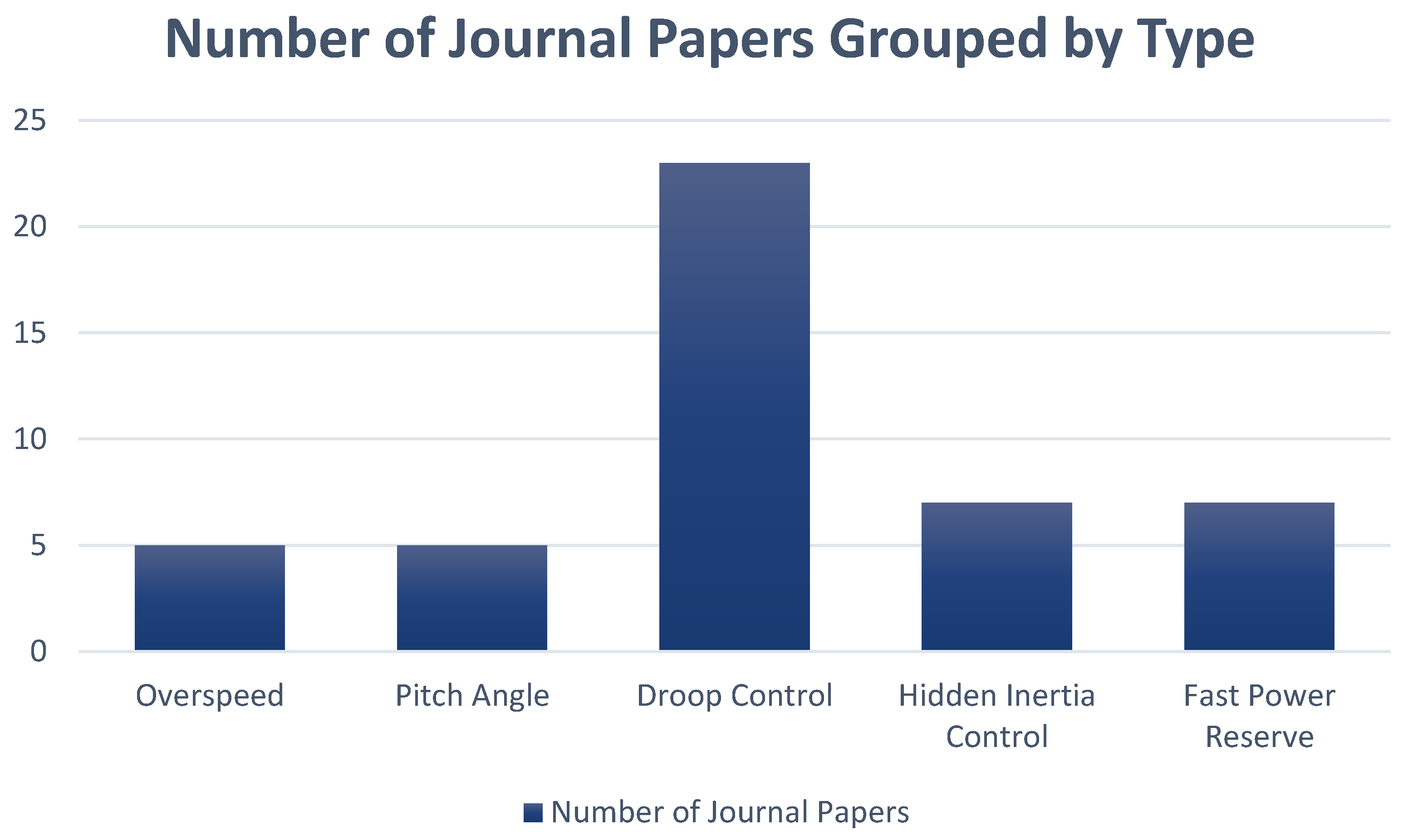
3.1.3. Emulated Inertial Response
The energy contained within a WTG system can be used when the frequency deviation exceeds the allowable frequency range [
16]. Droop control provides additional power in proportion to the frequency deviation [
17]. When a wind turbine operates at its maximum power, the additional power required is obtained from the kinetic energy of the rotating mass [
16]. Similar to droop control, hidden inertia emulation also releases kinetic energy from the wind turbine generator, but the inertial response is instead based on the response of traditional synchronous generators [
16]. Kinetic energy from the wind turbine can also be released by the fast power reserve controller, which acts on the rotor speed signal [
16]. A summary of the papers classified as regarding emulated inertial control, grouped by research area, is shown in
Table 4.
To improve the primary frequency response of wind power plants, the authors in [
37] propose a distributed synchronised control technique. The droop control uses an optimum power share ratio and the frequency of each WPP at the point of common coupling (PCC) to calculate the droop. The control technique finds the optimum power share ratio through an interactive algorithm. The synchronised droop characteristics of the WPPs are functions of the frequency variation at the PCC and are inversely proportional to the respective power share ratios. The droop is, therefore, changed with frequency variation followed by a load-generation imbalance due to the disturbance. The synchronised droop varies with increasing communications delay between nodes, which mitigates the effects of communications delay on the proposed method. The effectiveness of the proposed control technique was tested on a WPP-integrated 39-bus New England system and simulated in PSCAD/EMTDC. The simulation results show that the primary frequency response of the proposed control technique is better than that of the distributed Newton method. However, the performance of the distributed synchronised droop control deteriorates in the event of a false data-injection attack on the communications system.
The paper [
38] presents a communication-free alternative co-ordinated control scheme that prioritises frequency versus active power droop, fitted onto onshore VSCs. This scheme aims to transfer the wind turbine recovery power to undisturbed AC grids and allow for the correct control operation of multi-terminal high-voltage direct current (MTDC) systems during multiple power imbalances on different AC grids. The control scheme presented in the paper is compared with another co-ordinated control scheme which uses frequency versus DC voltage droop; the MTDC frequency support capability when wind farms do not provide extra power is also evaluated using a four-terminal HVDC system. The results presented in this paper show that during a single power imbalance in one AC grid, the fast frequency response from MTDC-connected wind farms limits the RoCoF on disturbed AC grids and transfers additional active power from another AC system, containing the system frequency deviation. The MTDC-connected windfarms were equipped with both the alternative co-ordinated control scheme and the co-ordinated control scheme. However, the co-ordinated control scheme was shown to have larger power oscillations when compared to the alternative co-ordinated control scheme under certain conditions. A three-terminal HVDC system was used to test the effectiveness of the co-ordinated control scheme and the alternative co-ordinated control scheme, both of which were modelled using PSCAD and experimental results were obtained using the RTDS tool of RSCAD. The MTDC frequency support capability when find farms do not provide extra power was verified using a four-terminal system and modelled using MATLAB/Simulink.
In [
39], a control scheme is proposed for DFIG-based wind turbines for improved transient response and participation in grid frequency support. The proposed control scheme consists of a main controller with two auxiliary controllers. The main controller is a fuzzy-based controller whose parameters are optimised using the genetic algorithm to achieve an optimal transient response. The two auxiliary controllers, frequency deviation and wind speed oscillation controllers, enable the DFIG to provide frequency to the grid and mitigate the impacts of wind speed fluctuations on the WTG output power by using the kinetic energy of the WTG. The performance of the controllers is highly dependent on the operating point of the WECS. Simulations were performed considering various scenarios to prove that the proposed control scheme can enhance the power system’s frequency performance after disturbances.
The authors in [
40] propose a non-linear dynamic model for the DFIG’s output power integrated into a dynamic model of the power grid. In addition to this, a state feedback controller is proposed by considering if DFIGs participate in grid frequency regulation or not. The stability of the entire system is considered using the input-to-state stability theory. The controller was embedded in the DFIG’s detailed model and simulations were conducted to evaluate its performance. In comparison to a conventional controller presented in the paper, the proposed controller delivered more output power during grid frequency support and a negated transient recovery period.
A fast frequency support scheme for wind turbine systems to raise the frequency nadir close to the settling frequency and eliminate the secondary frequency dip is proposed in [
41]. The frequency support scheme uses the kinetic energy of the wind turbine to raise the frequency nadir close to the settling frequency. In addition to raising the frequency nadir, an adaptive gain function of the real-time rotor speed and wind power penetration level is proposed to provide frequency nadir improvements under various wind speed and wind penetration levels. The last aspect of the proposed frequency support scheme is a new speed recovery strategy to mitigate the secondary frequency deviation associated with the rotor recovering its speed. The speed recovery strategy of the proposed frequency support scheme does not require the wind turbine to recover to the MPPT operating point during the primary frequency support phase. This allows the release of kinetic energy to be large, and no secondary frequency deviation will occur as no energy is extracted from the grid to recover the rotor speed. The three aspects of the proposed frequency support scheme have been implemented together, and the performance and stability of the wind turbines have been verified by comparisons of simulation results using the two-are power system for DFIG-based wind turbines and an IEEE 39-bus power system for PMSG-based wind turbines. The simulations were conducted using RTDS and Dymola.
In [
42], an active power control method for VSWTs to enhance the inertial response and damping capability during transient events is proposed. The control method implements an optimised power point tracking controller, which shifts the wind turbine operating point from the MPPT curve to the virtual inertia control curves in relation to the frequency deviation. This allows the wind turbine to use its kinetic energy to provide grid frequency support. In addition to frequency support, the authors also theoretically evaluate the effects of the virtual inertia curves on damping power oscillations. When compared with a supplementary derivative control, the proposed optimised power point tracking control method avoids an interaction between the inertial response and the MPPT controller. The optimised power point tracking control method can also contribute to the power system damping and provides a smoother recovery of the rotor speed. The control method was prototyped on a three-machine system comprising two synchronous generators and a PMSG WTG with a wind penetration level of 31% to validate the proposed method.
The authors in [
43] propose a control strategy that shifts the MPPT curve of the WTG to a virtual inertial control curve in relation to the frequency deviation so as to recover the kinetic energy of the wind turbine to provide grid frequency support. When compared to a PD-based inertial controller, the proposed virtual inertia control scheme provides a rapid response in the event of a sudden change in power and a smoother recovery to the MPPT operation. Comparative studies of the network frequency responses with and without the proposed virtual inertial control curves following a sudden system load and wind power change were conducted using MATLAB/Simulink. The simulation results show that the proposed control scheme can provide rapid dynamic frequency support to the grid with a reduction in frequency variations during fluctuations in both load and generation.
In [
44], a control strategy for primary and inertial responses for high-wind-integrated power systems is proposed. The proposed method couples the pitch and power control loops and provides control at both sub- and super-synchronous operation. This method can be used for either a WTG or can be used to dispatch an entire wind farm for a primary frequency response and avoid individual turbine control. The proposed control scheme was evaluated on a 39-bus dynamic IEEE New England test system with 39 buses and 10 generators. Two aggregated windfarms were placed at bus 38 and bus 32. The dynamic models of the turbine and converter dynamics were modelled in DIgSILENT Power Factory.
The authors in [
45] propose an inertial control scheme for a DFIG-based wind power plant. The proposed scheme aims to improve the frequency nadir and stable operation of the DFIG, especially when wind speed decreases during inertial control, by using adaptive gains set to be proportional to the kinetic energy stored in the DFIG, and the gains decrease with the declining kinetic energy. The results presented in the paper indicate that the proposed scheme improves the frequency nadir and prevents over-deceleration under certain wind and system conditions. The performance of the proposed adaptive gain scheme was verified through simulations of case studies using EMTP-RV.
The paper [
46] proposes two novel control strategies that enable an inertial response from PMSG wind turbines during transient events. The first strategy aims to provide inertia to the system by simultaneously using the energy of the DC-link capacitor and kinetic energy of the wind turbine rotor. The second strategy aims to provide inertia to the system by first using the energy of the DC-link capacitor and then the kinetic energy of the rotor in a cascading control scheme. The two control strategies were validated using a case study of one PSMG-based wind turbine subject to sudden load variations and then compared. Subject to the same disturbance event, it is shown that both control strategies can provide similar performance in stabilising the system frequency, permitting that the control parameters are set correctly in advance. However, the cascaded control scheme characterises itself by enabling a better energy harvest during a frequency disturbance. The simulation environment used in [
46] was not mentioned.
A non-linear system model of a VSWT may experience large deviations from its operating point during times of frequency support when linear control techniques are used. In [
47], a novel non-linear controller used to enable an inertial response from a VSWT is presented. A regular controller based on the input–output feedback linearisation approach was first designed, and then replaced by the proposed controller, where the output power of the wind turbine is expressed in terms of state variables and its Taylor series expansion used in the design of the control system. The proposed controller was embedded in a detailed model of a VSWT in MATLAB/Simulink and the various effects of different controller parameters were investigated. It is also emphasized that an appropriate co-ordination between conventional generating units and VSWTs equipped with the proposed controller results in a negligible transient recovery period. In addition to this, the behaviour of the controller was also investigated in the presence of fluctuating wind power input and was shown to provide a smoother frequency response. The advantages of the proposed controller over that of conventional PI control were also verified.
A co-ordinated control strategy to provide system inertial support for an offshore windfarm connected via an HVDC transmission line to an onshore main grid is discussed in [
48]. The authors compare two proposed strategies: one where the energy of the HVDC capacitors and the kinetic energy of the wind turbine are used simultaneously to provide inertial support without the installation of remote communication between the two terminals of the HVDC transmission line, while the other strategy employs a sequential release of energy starting with the HVDC capacitors and then using the kinetic energy of the wind turbine, with the aid of communication between the onshore and offshore grids. A detailed design and case study of the two control strategies have been conducted to compare and demonstrate the effectiveness of the control strategies in DIgSILENT Power Factory. It was shown from the test system that when subject to the same disturbance event, both strategies exhibit similar performance in stabilising the system frequency, permitting that the control parameters are set correctly in advance. However, the cascaded control scheme has been shown to have better wind energy harvest during a frequency disturbance event. The impact of the time delay, introduced by the communication of the two converters in the cascaded control scheme, may have some limited impact on the control system performance and overall system stability.
A distributed virtual inertia scheme that can be implemented by grid-side-connected power converters without any modification to the system hardware is proposed in [
7]. The virtual inertia provided to the grid uses the energy stored in the DC-link capacitors of the grid-side-connected power converters, and by regulating the DC-link voltages in proportion to the grid frequency, the DC-link capacitors are aggregated into a large equivalent capacitor. The limitations of the virtual inertia along with the design parameters such as DC-link capacitance, DC-link voltage and maximum DC-link voltage deviation were identified in this paper. The concept was verified by MATLAB/Simulink simulations and additional experimental results were also obtained to verify the efficacy of the proposed concept. The proposed concept indicates improvements in both the reduction in frequency deviation and the improvement in the RoCoF.
In [
49], the system frequency dynamics during inertia emulation and primary frequency support from wind turbine generators are studied and a mode-switching scheme of a wind turbine generator for frequency support is proposed. A proposed concept, the region of safety, which is the initial set of safe trajectories, is used to determine switching instances. The barrier certificate methodology was used to derive a new algorithm to enlarge the region of safety for given desired safety limits and worst-case disturbance scenarios that lead to finding the critical switching instants and a safe recovery procedure. Furthermore, the inertial response and load-damping effects are derived in the respective time frames of both inertial and primary frequency responses, respectively. The paper [
50] presents theoretical results under critical cases.
The paper [
50] proposes a torque limit-based method to emulate an inertial response. The efficacy of two torque limit-based methods is investigated through a power system with varying degrees of wind penetration levels in DIgSILENT Power Factory 2018. The first torque limit-based method considers a definite ramp rate for the inertial power of the wind turbines, while the second torque limit-based method varies the key parameters to obtain a linear relation between its characteristics and the operating point of the VSWT. It was shown that the second torque limit-based method places lower stress on the mechanical parts of the wind turbine, particularly at low rotor speeds, compared to the first torque limit-based method. While the results show a more stable system operation due to the emulated inertia, the results do, however, also reveal a deteriorated frequency nadir for both torque limit-based methods, while the degree of wind penetration is high due to the incoordination of the VSWT inertial response and the governor response of fossil-fuelled generating units. To mitigate this, it is suggested that the inertial power of the VSWT is multiplied by a frequency-dependent gain.
Based on a frequency response model derived in [
51], an estimation method to calculate the virtual moment of inertia provided by a DFIG-based wind farm is proposed. By using the Routh approximation method, an expression for the virtual moment of inertia for the grid-connected DFIG system is derived. To augment the availability of the expression, an estimation method based on the matrix pencil method and least squared algorithm for estimating the virtual moment of inertia provided by the wind farm is proposed. The effectiveness of the proposed method and the derived expression are tested on a DFIG grid-connected system and a modified IEEE 30-bus system in MATLAB/Simulink. Based on the results, the derived expression of the virtual moment of inertia directly expresses the inertial behaviour of a VSWT with additional frequency control and the estimation can efficiently calculate the virtual moment of inertia provided by the wind farm, regardless of whether VSWTs are involved in the frequency regulation of the grid or not. The ability to distinguish whether VSWTs are involved or not has value in power systems with high wind power penetration since it avoids the complex processing of parametric derivation and frequency response integration.
The frequency nadir and RoCoF are two metrics that temporary grid frequency support schemes strive to improve. The paper [
52] proposes a rotor speed-based inertia control scheme aimed at improving the performance of the system’s frequency regulation. Several case studies were performed, by varying wind speed conditions and wind power penetration levels, to investigate the performance of the proposed control scheme. The proposed control scheme was tested on a seven-machine power system, with an aggregated wind farm on MATLAB/Simulink. The results showed that the proposed scheme contributes to reducing the frequency nadir and RoCoF. In addition, the rotor speed-based inertia control scheme is decoupled from the system frequency which, in turn, decouples the inertial response speed from the inertia response amplitude, allowing an appropriate response to be realised, ensuring the stable operation of the WTG and the system.
In [
53], a frequency support scheme for DFIG wind turbines that implements a two-stage switching control scheme is proposed. The first stage of the control scheme uses a variable proportion coefficient designed to emulate an inertial response from the DFIG wind turbine, while the second stage of the control scheme uses a fuzzy logic control scheme to determine the variable proportion coefficient to both quickly restore the DFIG wind turbine to MPPT operation and avoid a secondary frequency dip in the system. The proposed control scheme was simulated in MATLAB/Simulink and case studies were performed on a WSCC 9-bus and IEEE 39-bus power system to verify the effectiveness of the proposed control scheme. The results show that the proposed control scheme can provide a satisfactory performance for frequency support despite varying operating conductions. The paper concludes by stating that in future work, the feasibility of implementing the control scheme in large-scale power systems with integrated wind turbines will be verified by hardware-in-the-loop simulation.
A time-variable droop control method for WTGs to provide grid frequency support is proposed in [
54]. In the proposed method, a positive droop characteristic provides frequency support and is followed by a period of negative droop to restore the kinetic energy of the rotor. The proposed method is simulated in DIgSILENT Power Factory, and the performance of the proposed control method is studied when subjected to various operating conditions. The results show that the frequency nadir can be improved while WTGs regain their kinetic energy and continue MPPT operation.
An adaptive droop control scheme for DFIGs to provide frequency support is proposed in [
55]. The initial value of the adaptive droop gain is determined in accordance with the wind speed and decreases with time. The efficacy of the proposed control scheme was simulated on a modified IEEE 14-bus system in EMTP-RV. The results show that the proposed method prevents a DFIG from stalling and reduces the second frequency drop during the rotor recovery phase.
A RoCoF droop control strategy to mitigate the problems of frequency deviation and high RoCoF is proposed in [
56]. In response to a high-frequency event, power is contributed to the grid from the reserve margin stored in the DC-link capacitor to mitigate the RoCoF. Once a new steady state has been reached, the reserve energy expended from the DC-link capacitor is recovered. An experimental comparison between the proposed RoCoF droop control strategy and conventional droop control strategy is conducted on the RT-LAB platform. The results of the comparison show that by adjusting control parameters such as increasing the droop coefficient or decreasing the bandwidth, a larger virtual inertia can be obtained than that contributed by the capacitor alone.
The paper [
57] proposes a strategy to co-ordinate the use of the kinetic energy of a VSWT and the energy stored in the DC-link capacitor from a VSC-HVDC-connected offshore wind farm to provide grid frequency support. The minimum rotor speed limit for the VSWT is determined by the rate of change of the mechanical power with rotor speed, which reduces the reduction in mechanical power caused by the low rotor speed, while the capacitor energy of the VSC-HVDC is used to contribute to the frequency nadir when the output power of the VSWT is less than the initial value. A detailed selection process of the controller parameters to improve the efficacy of the frequency control strategy is discussed and the proposed strategy was verified using a power system model in MATLAB/Simulink. The simulation results show that the proposed strategy can significantly reduce the grid frequency variation and maintain frequency stability in grids with high penetration of renewable energy.
In [
58], a time-sharing frequency co-ordinated control scheme is proposed. The implementation of the proposed scheme uses a frequency dead-band to co-ordinate the priority of the rotor virtual inertia control, DC-link virtual inertia control and a new adaptive frequency droop control. In the proposed control scheme, the electrostatic energy stored within the DC-link capacitor is always used first for frequency support, while the kinetic energy of the rotor is only used once the energy stored within the DC-link capacitor has been depleted. The performance of the proposed control scheme is simulated and studied in PSCAD/EMTDC. The results indicate that the time-sharing frequency co-ordinated control scheme has better performance in wind energy harvesting and system stability when compared to either traditional cascaded control or co-ordinated control strategies. In addition, the proposed scheme can also effectively avoid power oscillations.
In [
59], a co-ordinated control strategy for PMSG-based VSWTs to provide frequency support services is proposed. An inertial response is emulated by using the energy stored in the DC-link capacitor. However, since the available energy is relatively small, it is supplemented by a virtual capacitor control strategy which uses the rotor-side converter to provide a virtual capacitance that is larger than the actual DC-link capacitance by using the wind turbine’s kinetic energy in a similar way to the inertial response of a synchronous generator. Lastly, a power–frequency droop control is used to simulate the primary frequency control of a synchronous generator. The efficacy of the proposed control strategy was verified by simulation results in PSCAD/EMTDC and indicated that the RoCoF is mitigated and the frequency nadir is improved by adopting the proposed co-ordinated control strategy.
The authors in [
60] present a control approach based on the VSM concept. The approach presented in [
60], called an enhanced virtual synchronous machine (eVSM), uses the existing inertia of the DC-link component and does not emulate the rotating inertia based on an assumption of unlimited energy. The eVSM concept aims to reduce the need of a large DC-link component or battery storage while providing the same inertial response of an equivalent synchronous machine.
The paper [
61] proposes a two-level combined control strategy for offshore wind farms to provide frequency support for an onshore system. On the wind turbine level, each wind turbine implements inertial and droop control with adaptive coefficients, which allow wind turbines with high rotor speeds to release more kinetic energy, while working at MPPT mode. To mitigate the second frequency dip that occurs after frequency support, the wind turbines are divided into clusters based on their rotor speed and a step start-up control scheme is implemented for the wind turbine clusters to provide frequency support sequentially. The sequential frequency support allows one cluster to provide frequency support, while another recovers their rotor speed. At the system level, a communication-free allocation control strategy is proposed using the local frequency signal of onshore voltage-source converter stations to share the active power among the onshore stations. Case studies were conducted on a three-area four-terminal voltage-source converter-based multi-terminal high-voltage direct current offshore windfarm, in MATLAB/Simulink, to determine effectiveness of the two-level combined control strategy. The simulation results show the efficacy of the proposed control scheme under various scenarios. The paper concludes by stating that future work will consider optimising the number of clusters and asynchronous interconnection to the onshore system.
The authors in [
62] propose a control strategy for offshore HVDC-connected windfarms to provide an inertial response and primary frequency support. The proposed control strategy uses the HVDC converters to map the onshore frequency variation onto a voltage variation in the offshore grid. The authors have identified various limitations of conventional frequency support strategies from offshore-connected windfarms including large frequency deviations and high RoCoF in the offshore gird. In contrast, the proposed control strategy achieves the frequency requirements of the regional grid code without stressing the offshore grid as the frequency deviations and RoCoF are kept low. The proposed control strategy was tested on two test systems, one built entirely in the DIgSILENT Power Factory environment and the other on an IEEE 39-bus system. However, the proposed control strategy relies on using existing local communication systems to monitor the HVDC link voltage to distinguish between internal disturbances of the offshore AC grid and disturbances that arise due to a frequency disturbance of the main onshore AC grid. The authors are developing an adaptive control strategy with minimal reliance on local communication systems that can discern between internal and external disturbances.
The paper [
63] expands on a communication-less approach previously proposed in the literature for offshore wind turbines connected though a DC grid to multiple onshore AC grids. To extend this concept, the authors instead adopt a strategy where the onshore frequency variations are communicated to the offshore converters by using a fibre optic link embedded within the sub-sea DC cables. In the paper, a case study on a four-terminal DC grid connecting an offshore wind farm and two onshore AC systems illustrates the inertial support from the offshore wind farms with the proposed strategy. An aggregated model of the WTGs within the wind farm was used in the simulations and the parameters were obtained from a simulation model in DIgSILENT Power Factory. It is shown that the proposed weighted frequency scheme strategy can improve the transient frequency deviation in AC grids experiencing an under-frequency event.
The authors of [
64] propose a clustering-based co-ordinated control scheme for large-scale wind farms to provide frequency support. The proposed control scheme considers the distributed layout of WTGs and the wake effects inside the wind farm. WTGs are grouped by their wind profiles and the same control commands are dispatched to the same group. This effectively realises a group of WTGs as one single WTG and greatly reduces the control variables and complexity of the optimization problem. Simulations were conducted in MATLAB/Simulink to verify the effectiveness of the proposed control strategy.
A hierarchical non-linear model predictive control (MPC) for frequency support is proposed in [
65]. The proposed hierarchical non-linear MPC reduces the computational burden of the central controller when compared to a centralised non-linear MPC. The efficacy, efficiency and robustness of the proposed hierarchical non-linear MPC is validated by numerical simulations in MATLAB/Simulink. The results show that the non-linear MPC can reduce the computation time by as much as 50% when compared to a centralised non-linear MPC. This makes the proposed MPC method more favourable for large-scale wind farm implementations by avoiding the requirement of higher performance computation facilities.
The authors of [
66] present a short-term frequency support method for doubly fed induction generators (DFIGs) to improve the frequency nadir of the system using less kinetic energy and negate the second frequency drop caused by the rotor speed recovery. The proposed method adds a time-varying constant to the power reference for the maximum power point tracking (MPPT) function and allows the rotor to recover its speed along with the MPPT curve. The proposed method was analysed and validated on a modified IEEE 14-bus test system; however, the simulation environment was not disclosed. The simulation results indicate that the proposed method could provide a frequency nadir improvement with a lower kinetic energy cost for the DFIG in various scenarios and reduces the secondary frequency nadir. The performance of the proposed method is affected by wind speed, as the winds speed affects the levels of kinetic energy available. The proposed method was only tested against two wind speed conditions: 8 m/s and 10 m/s. The paper concludes by stating that due to the inherent variability and uncertainty of wind power, the frequency support capacity of DFIGs may be unable to meet the instantaneous frequency system requirements and may be required to operate with ESS systems. The authors state that future work will focus on a co-ordinated frequency control scheme between DFIGs and ESSs for frequency control will be studied in power systems with high wind power penetration.
In [
67], the effect of different power curves in releasing kinetic energy for grid frequency support is considered and two solutions are proposed. The first of the two proposed solutions aims at reducing the rate of change of frequency (RoCoF) while the second method is aimed at improving the RoCoF and the frequency nadir. The amount of kinetic energy used for frequency support was considered and the minimum wind turbine rotor speeds at various wind conditions were defined to avoid a large reduction in mechanical power while the wind turbine supports the grid frequency. The proposed solutions were validated by simulations using MATLAB/Simulink and indicate that the proposed solutions can reduce the RoCoF and frequency nadir while minimising the power imbalance when the rotor is reaccelerated. Given that wind turbines can regulate their power quicker than conventional generators and only have a limited and temporary kinetic energy reserve that can be used to support the grid frequency (that has to return to the wind turbine system after frequency control), it might be beneficial to use wind turbines to improve the RoCoF while using conventional generators to reduce the frequency nadir.
A power reference model that operates reliably during uncertain wind conditions while providing grid frequency support is proposed in [
69]. The proposed frequency support scheme provides an emulated inertial response to a disturbance by releasing a portion of the rotor’s available kinetic energy and decreases linearly with rotor speed. To determine the effectiveness of the proposed scheme, the proposed scheme was studied—along with other methods—on large-scale integrated wind farms on IEEE 9-bus and New England 39-bus systems simulated in DIgSILENT Power Factory and MATLAB.
In [
69], a dynamic demand control strategy that co-ordinates with the DFIG control is presented. This co-ordinated control strategy for DFIGs can provide an inertial response and primary frequency support. In addition, it can mitigate the secondary frequency dip following frequency support and improve the performance of the primary frequency support. For the demand control to work optimally, controllable loads with high power ratings that can accept a changing connection state and have minimal user impact are suggested. The proposed control strategy was simulated in MATLAB/Simulink, while the DFIG unit model and aggregated controllable load model were developed in OpenModelica and linked to ePHASORsim, a real-time power system transient simulation software.
To improve the frequency nadir while ensuring a rapid frequency stabilisation for high wind power penetration levels, a temporary frequency support scheme of a DFIG is proposed in [
70]. At the onset of a frequency disturbance, the power reference is incremented by the incremental power, which is a value that varies with rotor speed and wind power penetration level and is maintained for a pre-set period. The reference will decrease during this deceleration phase with the reduction in speed and release less kinetic energy. This, however, will aid in the rapid recovery of the rotor speed and, during the acceleration phase, the scheme will decrease the output of the DFIG with both rotor speed and time until the reference intersects the MPPT curve again. The results are obtained by running various scenarios on an IEEE 14-bus system and indicate that the scheme arrests the frequency nadir at a higher level, except for Scenario 2. The proposed control scheme was simulated using EMTP-RV.
The paper [
71] proposes a method to control variable-speed wind turbines to provide a frequency response through temporary over-production. The control method aims to determine the optimal power extraction profile between multiple generators to minimize the total loss of efficiency while allowing for an increase in generation. In case of frequency events, the cumulative generation is increased by a specified amount, while the power profile of individual turbines is determined by resolving an optimal control problem to minimise the loss of efficiency. The results of this method were evaluated through simulations and the concept was also extended to recover the VSWTs to their initial state of maximum efficiency in minimum time.
In [
72], a stable stepwise short-term frequency support scheme based on a DFIG wind farm is proposed and aims to improve the frequency nadir while quickly recovering the rotor speed. When a frequency event occurs, the output power is raised by increasing the power reference prior to the event and sustaining it for some predetermined period determined by the frequency nadir. The power reference then linearly decreases with the rotor speed until it converges with rotor speed to some pre-set value. To then recover the rotor speed, at the pre-set rotor speed, the power reference decreases with the rotor speed and time until it intersects with the MPPT reference. The proposed scheme was deployed on an IEEE 14-bus system with one DFIG-based wind farm and simulated on EMTP-RV. The simulation results of the four case studies showed that the proposed stepwise short-term frequency support scheme can raise the frequency nadir while recovering the rotor quicker than other conventional schemes in the case studies.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}