


Efficiency and Core Loss Map Estimation with Machine Learning Based Multivariate Polynomial Regression Model



Abstract
:
1. Introduction
2. Materials and Methods
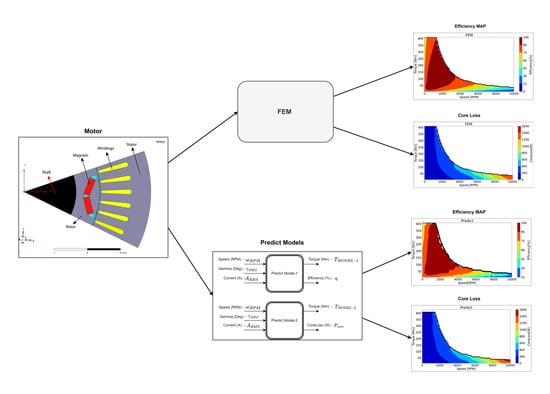
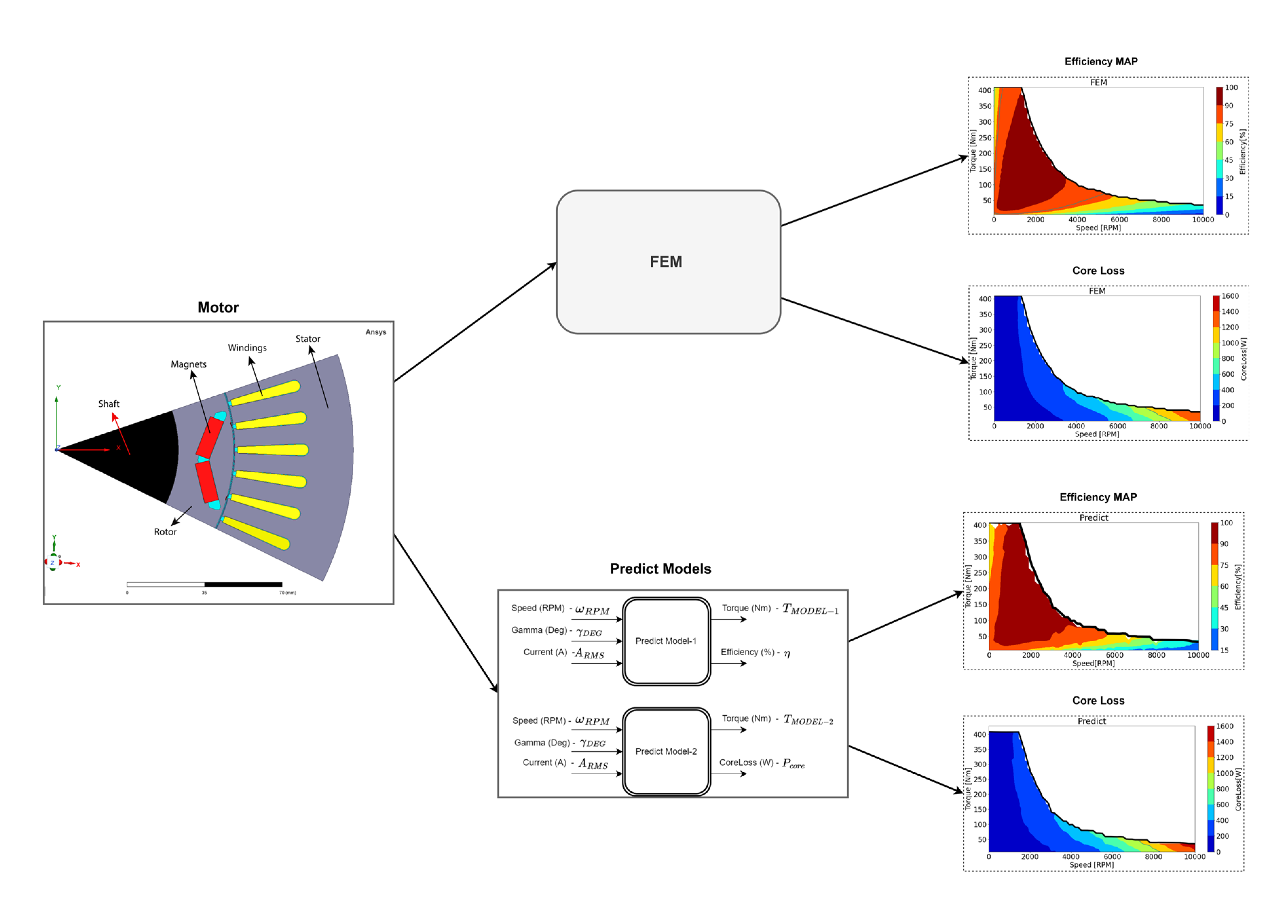
2.1. IPMSM FEM Model and Efficiency Map Calculation
2.2. Machine Learning Based Polynomial Regression
2.3. Estimation of Efficiency and Core Loss Maps
2.4. Data Set
2.5. Performance Metrics
2.6. Performance Evaluation of The Proposed Models
3. Results of the FEM and Proposed Method
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Eq. | ||||
|---|---|---|---|---|
| −0.1855 × 10−10 | 5.40037 × 10−11 | −4.41855 × 10−10 | −6.70102 × 10−10 | |
| −0.01040614 | 2.223461499 | −0.01040614 | 0.102099556 | |
| 0.257945862 | −0.173566871 | 0.257945862 | −0.096338237 | |
| 0.800278736 | 2.426193867 | 0.800278736 | 0.21954824 | |
| 0.004511307 | −26.5858788 | 0.004511307 | 1.441670458 | |
| −0.081800623 | −0.300988663 | −0.081800623 | 1.868839924 | |
| 0.331072627 | 9.493505418 | 0.331072627 | 1.364710171 | |
| −1.030025155 | 11.60518471 | −1.030025155 | 0.264684523 | |
| −1.645771113 | −29.48356205 | −1.645771113 | 0.752012172 | |
| 1.625278532 | 0.613405206 | 1.625278532 | −1.742215194 | |
| 0.296143802 | 77.13570132 | 0.296143802 | 2.07084931 | |
| −1.485047006 | −8.183799845 | −1.485047006 | −18.49713819 | |
| 0.948358448 | 33.36373522 | 0.948358448 | 15.60328151 | |
| 0.742572524 | 6.204857293 | 0.742572524 | 6.541083218 | |
| 2.839985505 | 12.18820514 | 2.839985505 | −22.29984621 | |
| −5.224390672 | −61.51370975 | −5.224390672 | 7.212440633 | |
| 1.333593807 | −41.87288433 | 1.333593807 | −1.110660866 | |
| 8.236891113 | 82.60955114 | 8.236891113 | −5.135667937 | |
| −0.876150694 | 9.370949363 | −0.876150694 | 9.505743396 | |
| −2.099431984 | 5.070273145 | −2.099431984 | −0.24245764 | |
| −1.596883971 | −88.56296516 | −1.596883971 | −7.7266445 | |
| 0.067609505 | 34.05100539 | 0.067609505 | 36.1395262 | |
| 4.425585006 | 141.2349006 | 4.425585006 | −70.77485692 | |
| 0.787365309 | −123.6626331 | 0.787365309 | −22.41807134 | |
| 11.30889623 | 49.75141728 | 11.30889623 | 134.1280755 | |
| −13.21140071 | −199.4535296 | −13.21140071 | −76.35220461 | |
| 3.839726464 | 118.272236 | 3.839726464 | 7.640299472 | |
| −35.59545235 | −386.1648547 | −35.59545235 | −49.51210094 | |
| 39.63556414 | 452.7095145 | 39.63556414 | 74.60415419 | |
| −3.654552896 | −26.44490044 | −3.654552896 | −24.20769484 | |
| −2.16194355 | 19.60854789 | −2.16194355 | −2.183843801 | |
| −7.16358501 | 49.22512228 | −7.16358501 | 22.58182018 | |
| 0.330411496 | −225.2552857 | 0.330411496 | −26.78475608 | |
| −4.031479404 | 100.8648552 | −4.031479404 | −0.40663652 | |
| 2.509891165 | −30.8710055 | 2.509891165 | 1.540612901 | |
| 1.520097822 | 10.30157734 | 1.520097822 | −12.61284229 | |
| −3.13768331 | 52.34667118 | −3.13768331 | 51.41740053 | |
| −3.097042388 | −10.1022335 | −3.097042388 | −15.33748672 | |
| 3.145881627 | −64,33176964 | 3.145881627 | −92.83820489 | |
| 15.21874315 | −69.5347401 | 15.21874315 | 90.18170667 | |
| −13.86241656 | −40.85391566 | −13.86241656 | 27.53616394 | |
| 2.138555237 | 143.1098268 | 2.138555237 | 70.99856742 | |
| −43.7017644 | −261.7424631 | −43.7017644 | −147.2524879 | |
| 42.06517177 | 334.8009696 | 42.06517177 | 9.5538821 | |
| −3.200458629 | 18.32869371 | −3.200458629 | 26.75569696 | |
| −6.930984407 | −135.4330182 | −6.930984407 | −23.54702987 | |
| 50.54368948 | 510.4062607 | 50.54368948 | 58.1983485 | |
| −50.70176882 | −510.0694027 | −50.70176882 | −20.87892363 | |
| 3.634109024 | −8.940534381 | 3.634109024 | −31.33945953 | |
| 0.632064195 | 10.97306289 | 0.632064195 | 14.75879043 | |
| 2.192335126 | 13.9092056 | 2.192335126 | 3.753905646 | |
| −3.056811449 | −135.7876994 | −3.056811449 | −15.71916208 | |
| 1.044715288 | 238.4612272 | 1.044715288 | 8.488592009 | |
| 6.322667642 | −75.28551163 | 6.322667642 | 10.01019862 | |
| −2.084729859 | −0.685593331 | −2.084729859 | −2.769192918 | |
| −0.25789423 | 10.08474252 | −0.25789423 | −0.577972739 |
References
- Waide, P.; Brunner, C.U. Energy-Efficiency Policy Opportunities for Electric Motor-Driven Systems. Int. Energy Agency 2011, 132. [Google Scholar]
- Akar, M. Detection of a Static Eccentricity Fault in a Closed Loop Driven Induction Motor by Using the Angular Domain Order Tracking Analysis Method. Mech. Syst. Signal Process. 2013, 34, 173–182. [Google Scholar] [CrossRef]
- Gu, W.; Zhu, X.; Quan, L.; Du, Y. Design and Optimization of Permanent Magnet Brushless Machines for Electric Vehicle Applications. Energies 2015, 8, 13996–14008. [Google Scholar] [CrossRef] [Green Version]
- Mahmoudi, A.; Rahim, N.A.; Hew, W.P. An Analytical Complementary FEA Tool for Optimizing of Axial-Flux Permanent-Magnet Machines. Int. J. Appl. Electromagn. Mech. 2011, 37, 19–34. [Google Scholar] [CrossRef] [Green Version]
- DIanati, B.; Kahourzade, S.; Mahmoudi, A. Axial-Flux Induction Motors for Electric Vehicles. In Proceedings of the 2019 IEEE Vehicle Power and Propulsion Conference, VPPC 2019, Hanoi, Vietnam, 14–17 October 2019. [Google Scholar] [CrossRef]
- Roshandel, E.; Mahmoudi, A.; Kahourzade, S.; Yazdani, A.; Shafiullah, G.M. Losses in Efficiency Maps of Electric Vehicles: An Overview. Energies 2021, 14, 7805. [Google Scholar] [CrossRef]
- Dutta, R.; Rahman, M.F. Design and Analysis of an Interior Permanent Magnet (IPM) Machine with Very Wide Constant Power Operation Range. IEEE Trans. Energy Convers. 2008, 23, 25–33. [Google Scholar] [CrossRef]
- Jung, H.C.; Park, G.J.; Kim, D.J.; Jung, S.Y. Optimal Design and Validation of IPMSM for Maximum Efficiency Distribution Compatible to Energy Consumption Areas of HD-EV. In Proceedings of the IEEE CEFC 2016—17th Biennial Conference on Electromagnetic Field Computation, Miami, FL, USA, 13–16 November 2016. [Google Scholar] [CrossRef]
- IEC 60034-1:2010; IEC Webstore, Rural Electrification, LVDC. IEC: Geneva, Switzerland, 2010.
- IEC 60034-2-1:2014; IEC Webstore, Energy Efficiency. IEC: Geneva, Switzerland, 2014.
- Chen, X.; Wang, J.; Sen, B.; Lazari, P.; Sun, T. A High-Fidelity and Computationally Efficient Model for Interior Permanent-Magnet Machines Considering the Magnetic Saturation, Spatial Harmonics, and Iron Loss Effect. IEEE Trans. Ind. Electron. 2015, 62, 4044–4055. [Google Scholar] [CrossRef]
- Khan, A.; Ghorbanian, V.; Lowther, D. Deep Learning for Magnetic Field Estimation. IEEE Trans. Magn. 2019, 55, 7202304. [Google Scholar] [CrossRef]
- Khan, A.; Mohammadi, M.H.; Ghorbanian, V.; Lowther, D. Efficiency Map Prediction of Motor Drives Using Deep Learning. IEEE Trans. Magn. 2020, 56, 7511504. [Google Scholar] [CrossRef]
- Jun, S.-B.; Kim, C.-H.; Cha, J.; Lee, J.H.; Kim, Y.-J.; Jung, S.-Y.; Lee, J.; Kim, J.H.; Jung, Y.-J.; Electronics, N. A Novel Method for Establishing an Efficiency Map of IPMSMs for EV Propulsion Based on the Finite-Element Method and a Neural Network. Electronics 2021, 10, 1049. [Google Scholar] [CrossRef]
- Hsu, J.S.; Ayers, C.L.; Coomer, R.H.; Wiles, C.W.; Campbell, K.T.; Lowe, R.T.; Michelhaugh, S.L. Report on Toyota/Prius Motor Torque Capability, Torque Property, No-Load Back Emf, and Mechanical Losses Oak Ridge Institute for Science and Education; Oak Ridge National Laboratory: Oak Ridge, TN, USA, 2004. [Google Scholar]
- Marlino, L.D.; Rogers, S.A. FY 2005 Report on Toyota Prius Motor Thermal Management Energy Efficiency and Renewable Energy Freedomcar and Vehicle Technologies Vehicle Systems Team; Oak Ridge National Laboratory: Oak Ridge, TN, USA, 2005. [Google Scholar]
- Kuptsov, V.; Fajri, P.; Trzynadlowski, A.; Zhang, G.; Magdaleno-Adame, S. Electromagnetic Analysis and Design Methodology for Permanent Magnet Motors Using MotorAnalysis-PM Software. Machines 2019, 7, 75. [Google Scholar] [CrossRef] [Green Version]
- Steinmetz, P. On the Law of Hysteresis. Trans. Am. Inst. Electr. Eng. 1892, 9, 1–64. [Google Scholar] [CrossRef]
- Li, J.; Abdallah, T.; Sullivan, C.R. Improved Calculation of Core Loss with Nonsinusoidal Waveforms. In Proceedings of the Conference Record—IAS Annual Meeting (IEEE Industry Applications Society), Chicago, IL, USA, 30 September–4 October 2001; Volume 4, pp. 2203–2210. [Google Scholar] [CrossRef]
- ANSOFT Maxwell/ANSYS Maxwell Documentation. Available online: http://ansoft-maxwell.narod.ru/english.html (accessed on 21 September 2022).
- Kahourzade, S.; Ertugrul, N.; Soong, W.L. Loss Analysis and Efficiency Improvement of an Axial-Flux PM Amorphous Magnetic Material Machine. IEEE Trans. Ind. Electron. 2018, 65, 5376–5383. [Google Scholar] [CrossRef]
- Wu, X.; Wrobel, R.; Mellor, P.H.; Zhang, C. A Computationally Efficient PM Power Loss Derivation for Surface-Mounted Brushless AC PM Machines. In Proceedings of the 2014 International Conference on Electrical Machines, ICEM 2014, Berlin, Germany, 2–5 September 2014; pp. 17–23. [Google Scholar] [CrossRef]
- Wei, J.; Chen, T.; Liu, G.; Yang, J. Higher-Order Multivariable Polynomial Regression to Estimate Human Affective States. Sci. Rep. 2016, 6, 23384. [Google Scholar] [CrossRef] [Green Version]
- Pang, Y.; Shi, M.; Zhang, L.; Song, X.; Sun, W. PR-FCM: A Polynomial Regression-Based Fuzzy C-Means Algorithm for Attribute-Associated Data. Inf. Sci. 2022, 585, 209–231. [Google Scholar] [CrossRef]
- Potts, D.; Schmischke, M. Learning Multivariate Functions with Low-Dimensional Structures Using Polynomial Bases. J. Comput. Appl. Math. 2022, 403, 113821. [Google Scholar] [CrossRef]
- Consonni, V.; Baccolo, G.; Gosetti, F.; Todeschini, R.; Ballabio, D. A MATLAB Toolbox for Multivariate Regression Coupled with Variable Selection. Chemom. Intell. Lab. Syst. 2021, 213, 104313. [Google Scholar] [CrossRef]
- Hardin, R.H.; Sloane, N.J.A. A New Approach to the Construction of Optimal Designs. J. Stat. Plan. Inference 1993, 37, 339–369. [Google Scholar] [CrossRef]
- Emeksiz, C. The Estimation of Diffuse Solar Radiation on Tilted Surface Using Created New Approaches with Rational Function Modeling. Indian J. Phys. 2020, 94, 1311–1322. [Google Scholar] [CrossRef]
- Gao, L.; Li, D.; Yao, L.; Gao, Y. Sensor Drift Fault Diagnosis for Chiller System Using Deep Recurrent Canonical Correlation Analysis and K-Nearest Neighbor Classifier. ISA Trans. 2022, 122, 232–246. [Google Scholar] [CrossRef]
- Steurer, M.; Hill, R.J.; Pfeifer, N. Metrics for Evaluating the Performance of Machine Learning Based Automated Valuation Models. J. Prop. Res. 2021, 38, 99–129. [Google Scholar] [CrossRef]
- Chicco, D.; Warrens, M.J.; Jurman, G. The Coefficient of Determination R-Squared Is More Informative than SMAPE, MAE, MAPE, MSE and RMSE in Regression Analysis Evaluation. PeerJ Comput. Sci. 2021, 7, 1–24. [Google Scholar] [CrossRef] [PubMed]
- Khalifa, R.M.; Yacout, S.; Bassetto, S. Developing Machine-Learning Regression Model with Logical Analysis of Data (LAD). Comput. Ind. Eng. 2021, 151, 106947. [Google Scholar] [CrossRef]
- Weeraddana, D.; Khoa, N.L.D.; Mahdavi, N. Machine Learning Based Novel Ensemble Learning Framework for Electricity Operational Forecasting. Electr. Power Syst. Res. 2021, 201, 107477. [Google Scholar] [CrossRef]
- Abidi, S.M.R.; Xu, Y.; Ni, J.; Wang, X.; Zhang, W. Popularity Prediction of Movies: From Statistical Modeling to Machine Learning Techniques. Multimed. Tools Appl. 2020, 79, 35583–35617. [Google Scholar] [CrossRef]
- Kakoudakis, K.; Behzadian, K.; Farmani, R.; Butler, D. Pipeline Failure Prediction in Water Distribution Networks Using Evolutionary Polynomial Regression Combined with K-Means Clustering. Urban Water J. 2017, 14, 737–742. [Google Scholar] [CrossRef]












| Parameter | Value |
|---|---|
| Rated Power | 50 kW |
| Rated Torque | 400 Nm |
| Rated Speed | 1194 rpm |
| DC Bus voltage | 300 Vdc |
| Rated Current | 200 Arms |
| Current density (A/mm2) | 27.4 |
| Poles&Slots | 8&48 |
| Stator outer diameter | 269.2 mm |
| Stack length | 83.6 mm |
| Lamination material | JFE_Steel_35JN300 |
| Magnet grade | N36Z |
| Models | Input Parameters | Input Variables | Output |
|---|---|---|---|
| Model-1 | |||
| Model-2 | |||
| Models | Errors | MAE | RMSE | |
|---|---|---|---|---|
| Model-1 | Train | 0.99630 | 0.00811 | 0.01395 |
| Test | 0.99172 | 0.01283 | 0.02130 | |
| Model-2 | Train | 0.99974 | 0.00265 | 0.00359 |
| Test | 0.99739 | 0.00709 | 0.01063 |
| Models | MAE | RMSE | |
|---|---|---|---|
| Model-1 | 0.78121253 | 0.184664 | 0.0913293 |
| Model-2 | 0.960301 | 0.0360801 | 0.00219244 |
| FEM | Proposed Method |
|---|---|
| 15 s | 0.0203 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mısır, O.; Akar, M. Efficiency and Core Loss Map Estimation with Machine Learning Based Multivariate Polynomial Regression Model. Mathematics 2022, 10, 3691. https://doi.org/10.3390/math10193691
Mısır O, Akar M. Efficiency and Core Loss Map Estimation with Machine Learning Based Multivariate Polynomial Regression Model. Mathematics. 2022; 10(19):3691. https://doi.org/10.3390/math10193691
Chicago/Turabian StyleMısır, Oğuz, and Mehmet Akar. 2022. "Efficiency and Core Loss Map Estimation with Machine Learning Based Multivariate Polynomial Regression Model" Mathematics 10, no. 19: 3691. https://doi.org/10.3390/math10193691
APA StyleMısır, O., & Akar, M. (2022). Efficiency and Core Loss Map Estimation with Machine Learning Based Multivariate Polynomial Regression Model. Mathematics, 10(19), 3691. https://doi.org/10.3390/math10193691