1. Introduction
Strictly positive modal formulas are constructed of propositional variables and the constant ⊤ using only conjunction and diamonds. Strictly positive logics consists of implications between strictly positive modal formulas. They were studied in the context of universal algebra [
1], knowledge representation [
2,
3] and proof theory [
4,
5,
6].
In this paper, we investigate strictly positive fragments of modal logics that include the confluence axiom
and its bimodal counterpart
. The confluence axiom is an example of a simple but very useful formula. It appears in very different areas of modal logic, ranging from epistemic logic to the logic of space-time (cf. [
7]) and the logic of forcing [
8]. Bimodal confluence is valid in any product of two Kripke frames and plays an important role in multidimensional modal logic [
9]. When
stands for
and
stands for
, bimodal confluence turns into the principle
, which is one of the basic axioms of first-order logic.
For a modal logic
L by
, we denote its
strictly positive fragment; that is, the set of all strictly positive implications in
L. The modal calculus
can be easily modified to work only with strictly positive implications yielding a natural calculus
. The question of whether, given a strictly positive implication
,
axiomatises
was thoroughly investigated in [
10]. For example, this is true for
and
but not for
. The confluence axiom
cannot be rewritten as a strictly positive implication. This raises the question of how this axiom is reflected in strictly positive fragments of modal logic that contain it. This question is highly non-trivial. For example, Svyatlovskii showed in [
11] that the strictly positive fragment of
is axiomatised by
and
, which is a rather unexpected transformation of .3 axiom
(undefinable as a strictly positive implication as well as confluence axioms, see Section 9.1 of [
10]).
In this paper, we show that the impact of the unimodal confluence axiom on the axiomatisation of strictly positive fragments is rather weak. In the presence of , it simply disappears and does not contribute to the axiomatisation. Without it changes into a weaker formula . Some may find it unsurprising, but in our opinion, this is a remarkable property of the unimodal setting. In contrast, we show that the strictly positive fragment of is axiomatised by an infinite set of formulas of the form and , and that it cannot be captured by any finite set of strictly positive implications. We also show that strictly positive fragments of two-dimensional products of modal logics in the set also are axiomatised by these two infinite series of formulas, except for the cases when one or both of the factors contain , in which case some or all of these formulas become superfluous and can be omitted.
2. Preliminaries
2.1. Basic Modal Logic
Let be a countable set of proposition letters, with typical members denoted by p, q, etc. Modal formulas over are built using the constants ⊤ and ⊥, dual-modal operators ⋄ and □ and (classical) binary connectives ∨ and ∧ and →.
A normal modal logic is a set L of formulas that contains all classical propositional tautologies, the formula , and that is closed under the standard rules Modus ponens, Uniform substitution and Generalization (given infer ). The smallest normal modal logic is denoted by . For a set of modal formulas and a modal logic L, denotes the smallest normal modal logic containing . For a modal formula, , .
As usual, a Kripke frame is a pair , where W is a non-empty set of worlds and R is a binary relation on W (that is ). Sometimes, we refer to the W- and R-components of as and . A point u in W is called final in F if u has no R-successors. A (Kripke) model based on F is a pair , where V is a function assigning to each proposition letter p a subset of W. The inductive definition of the truth value of a formula at a point x in a model M is standard. The fact that is true at x in M is denoted by . In particular, boolean connectives are computed by classical truth tables within a point, if there is a point such that and if for all points y such that we have .
A formula is said to be true in a model, in symbols , if is true at all worlds in W; is valid in a frame F, in symbols , if is true in all models based on F.
Each class of Kripke frames
gives rise to a normal modal logic
. It is known (cf. [
12]) that
is the logic of all Kripke frames satisfying
.
In addition to
, we consider the logics
Their axioms , and are strictly positive implications and correspond to conditions , and in the same way as corresponds to .
2.2. Strictly Positive Implications
A strictly positive term (or sp-term) is a modal formula constructed from propositional variables, the constant ⊤, conjunction ∧, and the unary diamond operator ⋄. An SP-implication takes the form
, where
and
are SP-terms. An SP-logic is a set of SP-implications that contains formulas
and is closed under uniform substitution (of sp-terms for propositional variables) and rules
(see also the Reflection Calculus
of [
4,
5]). For an sp-implication
,
denotes the smallest SP-logic containing
. By
, we denote the natural modification of
for strictly positive implications with two modal operators
and
with two versions of the third rule for each of the two diamonds. It is easy to see that the rule
is admissible in
.
For a normal modal logic
,
the strictly positive fragment of is
It is easy to check that is an SP-logic.
Given an sp-term , we define by induction a Kripke model based on a finite tree with root . For , consists of a single irreflexive point with for all variables p. For , consists of a single irreflexive point , , and for . For , we first construct disjointed and , and then merge their roots and into r such that iff , for some . Finally, for , we add a fresh point r to , and set and for all variables p. We refer to as the -tree model.
Given two Kripke models, and , a map is a homomorphism from into if it satisfies the following conditions:
for all in , if , then
for all x in and propositional variables p, implies
Proposition 1. For any sp-term t, Kripke model M and point w in M, we have if there is a homomorphism with .
Proposition 2. For any sp-terms s and t, the implication is derivable in if there is a rooted homomorphism from into .
Propositions 1 and 2 are well known and can be shown by induction on the length of the sp-term
t. Proposition 2 can also be obtained as a consequence of a representation theorem for semilattices with monotone operators [
13], but this is outside of the scope of this paper, where we prefer to approach the completeness of
-based calculi syntactically whenever it is possible.
2.3. The Chase
A tuple-generating dependency [
14] is a first-order formula of the form
where
,
and
are disjoint tuples of variables and
and
are possibly empty conjunctions of R-atoms in respective sets of variables. We call
the
body and
the
head of the corresponding TGD. Examples of TGDs include
and
For a conjunction of R-atoms (with variables and without constants) we introduce constants for all object variables v in and set where and .
Given a Kripke frame
trigger
h for a TGD of the form (
4) is a homomorphism from
into
F. Trigger
h is
good if
h cannot be extended to a homomorphism from
into
F. An application of a good trigger
h for
to
F is a frame
where
extends
W with
fresh constants
for all
and
extends
R with pairs
for all atoms
in
where
For a set of TGDs
by
we mean the relational structure, which is the result of the simultaneous application of all good triggers for
F for all TGDs in
to
F. We define
as the union or the inverse limit of infinite chain
. This version of the chase is similar to the one defined in [
15] and is known in the database literature as ‘standard chase’ (in [
16]) or as ‘restricted chase’ (in recent papers). In papers on logic, good triggers are sometimes called ‘defects’ and the chase construction is then referred to as ‘defect elimination’.
It should be clear that always satisfies . For a Kripke model , we define as . Those points of that are already in F are called non-anonymous, and those that are not are called anonymous. Anonymous points are often referred to in the database literature as ‘labelled nulls’, but we like to think that Kripke models consist of points. The rank of an anonymous point is the number of the iteration when it was created. The rank of non-anonymous points is 0 by definition.
Proposition 3. For any SP-implication we have iff .
(⇒) Suppose that . Clearly and also , so there exists a frame such that , . Therefore, this F refutes , showing that is not in .
(⇐) Suppose that . Consider an arbitrary Kripke frame F satisfying , valuation V and its point w such that . Hence there is a homomorphism f from into F sending the root of to w. Now consider (potentially infinite) the step-by-step construction of . Following this process in a step-by-step manner and using the fact that F satisfies at each step, we extend f to a homomorphism h from to F. Since , it follows that . This shows that is in .
2.4. Two-Dimensional Products of Modal Logics
In this paper, we also consider modal formulas with two modalities: and , and their dual modalities: and .
The definition of a normal bimodal logic repeats the definition of normal modal logic except for the axioms () and the Generalization rules (given as infer ) (). The smallest bimodal logic is denoted by . For a set of bimodal formulas and a bimodal logic L, denotes the smallest normal bimodal logic containing .
Definition 1. For Kripke frames and we define , where Frame is called the product of and .
Definition 2. For two normal modal logics, and , we define the product Definition 3. Let and be two modal logics with one modality □, then the fusion
of these logics is the following bimodal logic:where is the set of all additional axioms in where each □ is replaced by . We consider the following formulas
They correspond to the following TGDs:
Definition 4. For two unimodal logics and we define the commutator
of these logics by Theorem 1 ([
17]).
For logics 4. Strictly Positive Fragments of Unimodal Logics with Confluence
In this section, we prove the following two theorems:
Theorem 2. .
Theorem 3. For each L in the following set of logics we have (and so they both are axiomatised by with the strictly positive axioms of L due to a general result from [10]). The proof of Theorem 2 is based on the following two lemmas. The following lemma can be called the completeness of with respect to TGD .
Lemma 1. Suppose that s and t are sp-terms such that there is a rooted homomorphism h from into . Then is derivable in .
Proof. First note that in
we can derive
:
Then note that
can be obtained from
by a sequence of applications of individual triggers for
in such a way that all intermediary models are of the form
for some term
. (This is due to the fact that applications of
preserve the ‘tree-shapedness’ of models.) Thus there exists a sequence of sp-terms
such that
is the result of the application of trigger
g for
to
for
and a rooted homomorphism from
into
. Now we argue that all implications
are derivable in
. To derive
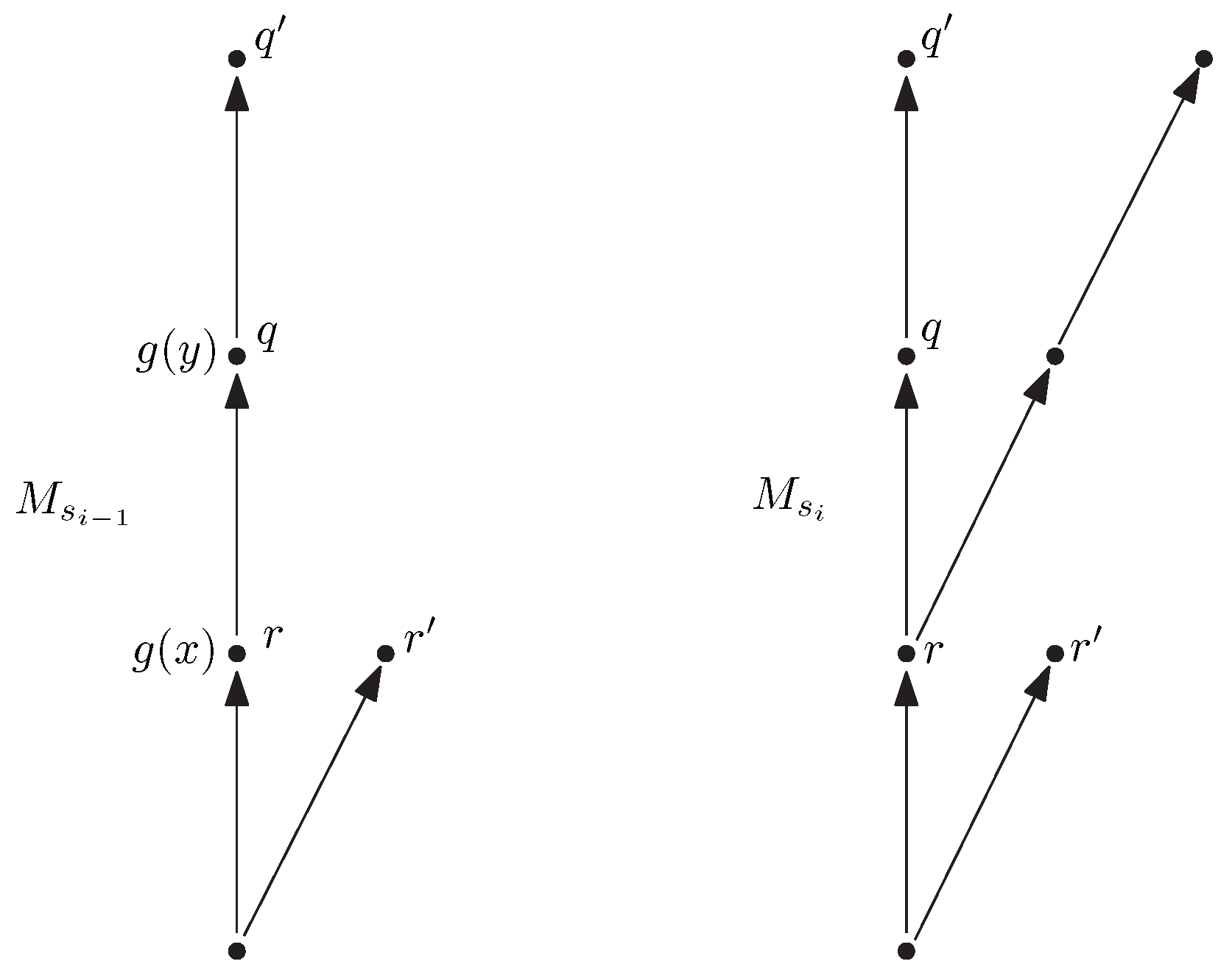
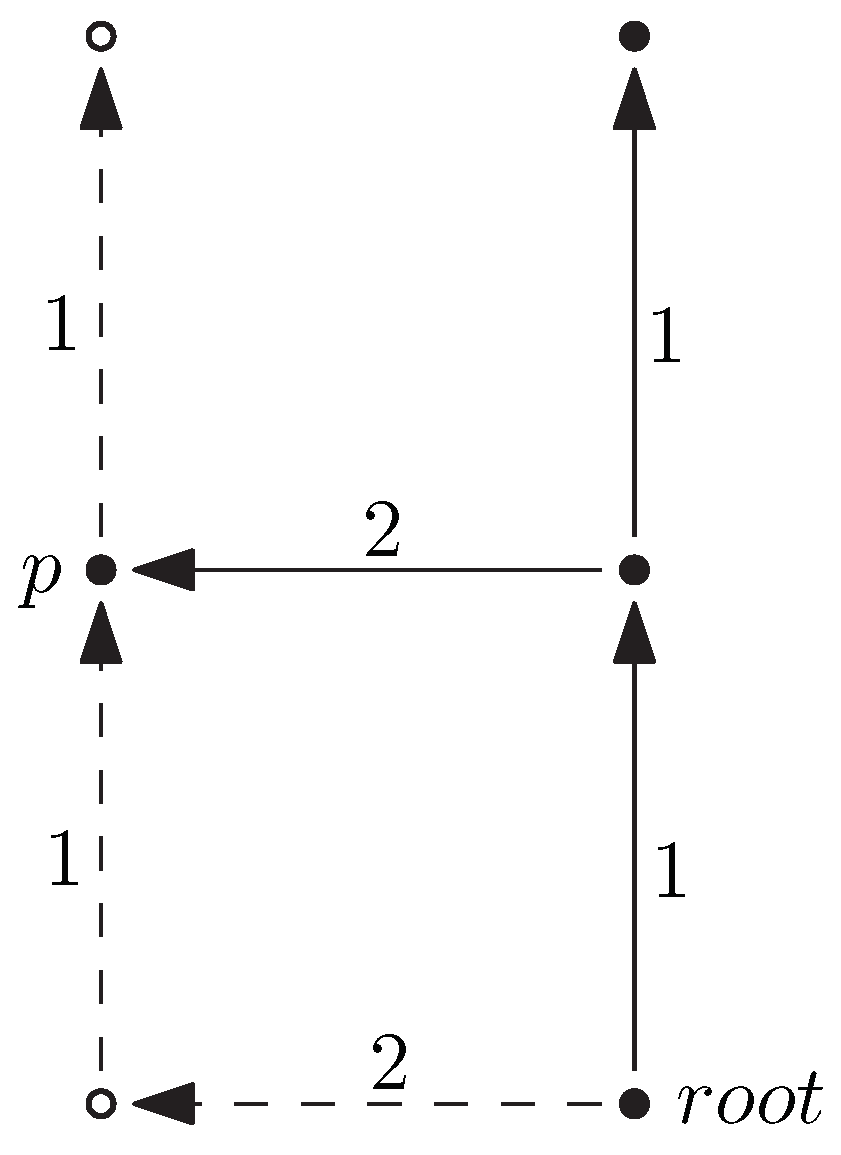
it is sufficient to take
, then substitute the term corresponding to the ‘part of
sitting above
’, which is common for
and
, and then apply rules 3 and (
3) of
to derive ‘the part of
sitting below
’, which is again common for two models, on both sides of the resulting implication (here
x and
y are variables in the antecedent of
). This argument is illustrated in
Figure 1. The implication
is derivable by Proposition 2. Now it remains to apply
times the first rule of
. □
Lemma 2. For each frame F we can define a partial function on such that
its domain contains all non-final points of F and the image of .
if , then .
Proof. Each non-final point u of F has a successor v, which gives rise to trigger h for . If this trigger is good, we set to be introduced by an application of this trigger. Otherwise, we set to be , where h is an extension of h to the head of the rule. Then we define on those points of where it has not been defined so far. Then we deal similarly with and so on. □
Proof of Theorem 2. It should be clear that every theorem of is a strictly positive theorem of since is a theorem of . Therefore, it remains to show that every strictly positive theorem of is a theorem of . Now take a strictly positive implication such that . By Proposition 3, it follows that . Therefore, there exists a rooted homomorphism h from into . If is a singleton, then both and are isomorphic to , and we are done. Otherwise, note that satisfies (P1) and (P2). It follows that . Indeed, we can define a homomorphism from into by recursion. We set for non-anonymous . For anonymous we look at the parent v of u in and set assuming that is already defined. It should be clear that is a homomorphism, since due to (P1) and (P2), no points above an anonymous u in can be in for any p. It remains to apply Lemma 1 to conclude that is derivable in . □
The proof of Theorem 3 is similar. We use TGDs , and and the fact that properties (P1) and (P2) still hold in the setting of L. For example, for , (P1) and (P2) hold for , and this allows us to transform a homomorphism into one using the fact that each point in has a successor. We also use the ‘completeness lemma’ for strictly positive counterparts of to go from the existence of to a derivation of in the corresponding strictly positive logic:
Lemma 3. Suppose that Φ is a subset of and that Π is the corresponding subset of . Then for any sp-terms s and t, if there is a rooted homomorphism h from into , then the implication is derivable in .
We consider this lemma as folklore (cf. [
1,
2,
5,
10]) and leave it without a proof.
5. Strictly Positive Fragments for Logics with Bimodal Version of Confluence
In this section, we consider logic with bimodal versions of confluence . We start by considering this axiom on its own.
and
correspond to the TGDs:
The next part of the paper is dedicated to the proof of the following theorem:
Theorem 4. .
Lemma 4. All formulas in and are theorems of .
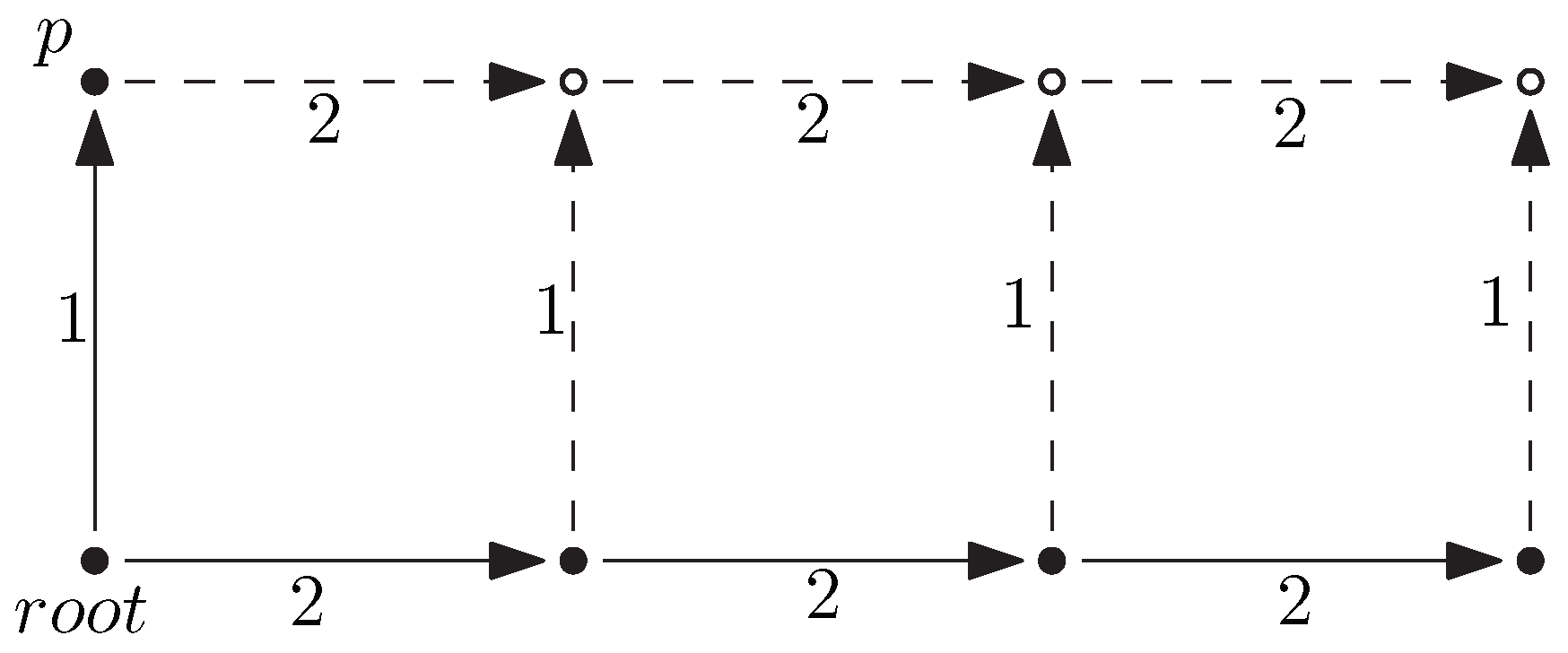
Proof. First take
and note that
(see
Figure 2).
The argument for is similar. □
To illustrate the interplay between
and
, consider the following inference:
This deduction exemplifies the following ‘completeness lemma’ for and :
Lemma 5. Suppose that s and t are sp-terms. Then if maps homomorphically into the model (with preservation of roots), then the implication is derivable in .
To prove it, we need more verbose modifications of
and
. We define, by recursion, the terms
for
and
by setting
,
and
for
. Now we set
and
Since one can easily derive in
implications
and
and then use admissible rule (
3), we have
Lemma 6. The formula is derivable in and the formula is derivable in .
The proof of Lemma 5. The proof is similar to the proof of Lemma 1. Recall that a chase is a sequence of applications of triggers. Further, note that if a model
M is obtained by an application of a trigger for
or
to a model
for an sp-term
, then there is an sp-term
such that
M is isomorphic to
. (This is due to the fact that applications of
and
preserve the ‘tree-shapedness’ of models.) Thus there is a sequence of terms
, such that
is obtained from
by an application of a trigger for
or
and a homomorphism from
into
. We argue that implications
are deducible in
. Indeed, we start with an axiom
or
expressing the application of a trigger, and then apply substitutions and the rules
for
to infer full implication
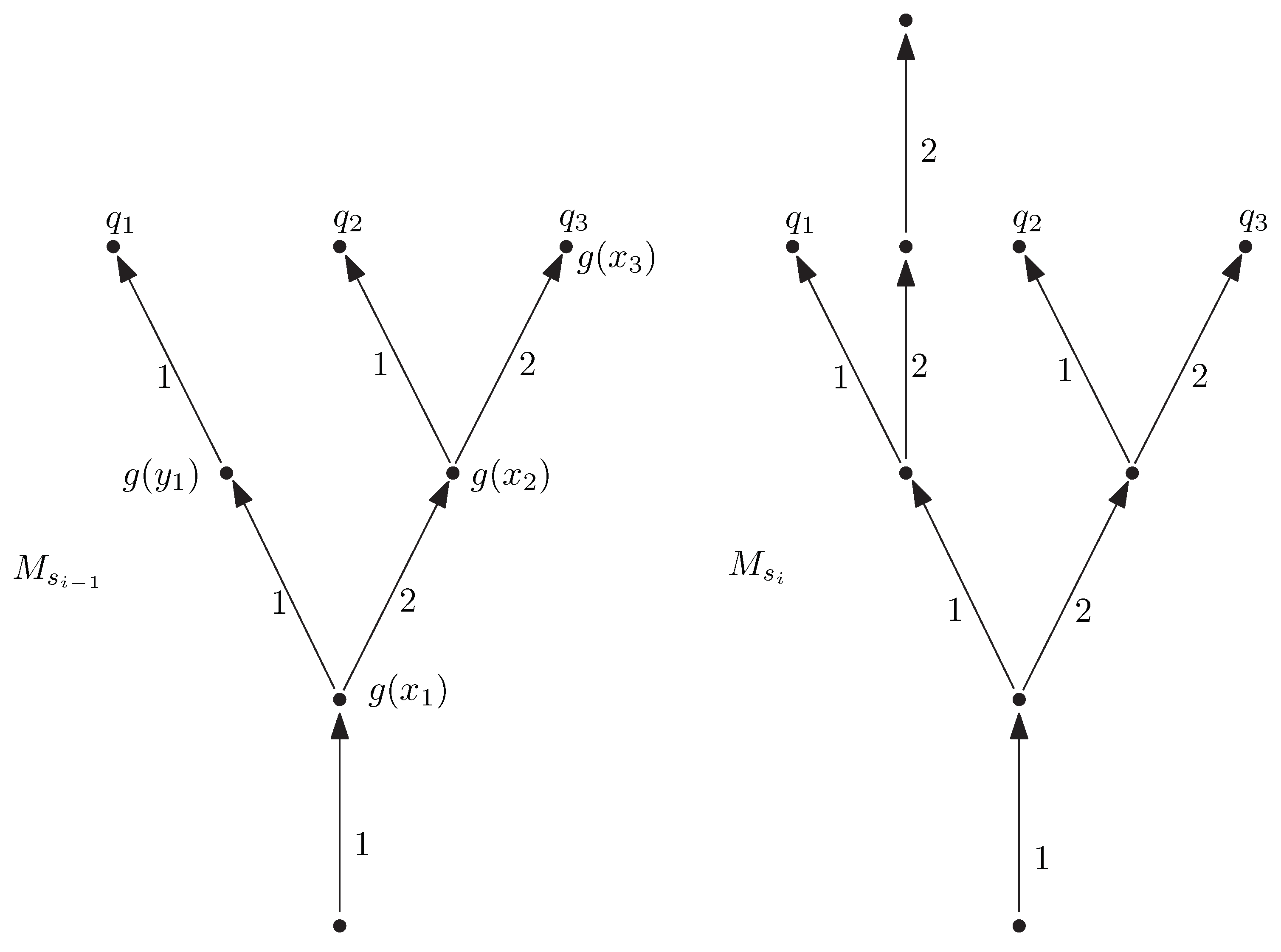
(cf. (2) and (3)). This argument is explained in
Figure 3. Additional variables
in
and
serve as substitution slots at object variables
and
in the body of TGDs. Implication
is deducible in
by Proposition 2. Now it remains to apply
times the rule
□
Let be a frame and . The i-depth of x is the maximum overall lengths of -path starting in x if its finite and ∞ otherwise. Notation: . For example, for a reflexive point x, we have .
Lemma 7. Let be an arbitrary frame satisfying and . Then for each x and y in W we have
if , then , and
if , then .
To see this, note that the statements of Lemma 7 simply rephrase and using the notion of depth.
Given an sp-term t with operators and , a root branch in is a finite sequence of 1 and 2 such that if we define, by recursion, the terms for by setting and for , there is a rooted homomorphism from into . For a term t by we denote the largest number of i’s in any root branch in for . For example, for and .
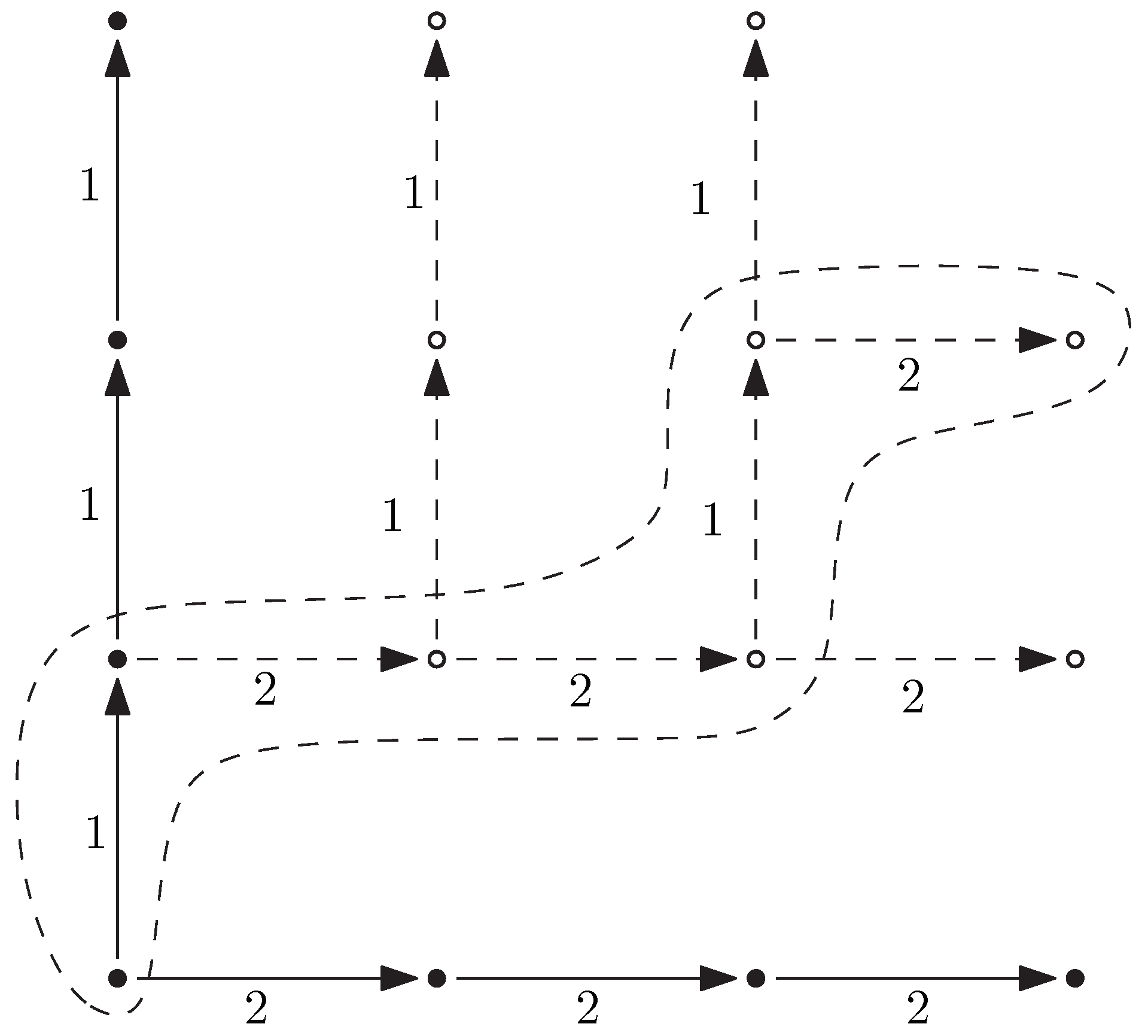
Lemma 8. Let be an arbitrary frame satisfying and . Suppose that and t is a variable-free term such that and . Then there is a homomorphism from into F, sending the root of t to x.
Proof. The proof is by induction on the length of term t. The case when is obvious.
If
, then
, and there exists
y with
and
Assuming , we use and deduce that . We apply the IH and conclude that there is a homomorphism from to F, sending the root of to y. This homomorphism can be easily extended to by sending the root of to x.
The case when is similar. If , then IH can be applied to and . The desired homomorphism is the union of homomorphisms from and from . □
This argument is illustrated in
Figure 4 for
.
The following lemma says that for any term s, the ‘anonymous part’ of is commutative in the strong following sense.
Lemma 9. Fix a term s. Suppose that h is a trigger for into such that is an anonymous point of rank . Then there is a point v in of rank such that and . A similar claim holds for .
To see this, focus on the moment when z is created by trigger for and take as v.
Suppose that t is an sp-term and x is a point in such that for all propositional variables p. In this case, by we denote such a term that the submodel of generated by x is isomorphic to .
The proof of Theorem 4. (⊇) In Lemma 4, we prove that all formulas in and are theorems of .
(⊆) Now take a strictly positive implication such that . By Proposition 3 it follows that . Therefore, there exists a rooted homomorphism h from into . Suppose that holds in , is not anonymous, but is anonymous. By the iterative application of Lemma 9 we obtain that and . Therefore, by Lemma 8, there exists a homomorphism from the subtree of generated at x in the direction of y into , sending x to . In a similar way, we define homomorphisms for pairs of points of such that holds in , is not anonymous, but is anonymous. By applying this argument to all such pairs in , we obtain a homomorphism from into . Again (P1) and (P2) are used to ensure that no points above an anonymous u in can be in for any p. Finally, by Lemma 5, we conclude that is derivable in . □
Now let us turn to the product logic
, which, in addition to
, contains axioms
and
. Let us define a set of TGDs
These axioms are already strictly positive and from a general result of [
10] (Theorem 35). Therefore, it follows that
for
. Now we argue that indeed
Theorem 5. .
Since TGDs create points that do not satisfy (P2), we need a softer condition. Suppose that and . Take an sp-term s and consider . All anonymous points in fall into two groups: introduced by (type 1) and introduced by (type 2). Relying on Lemma 9, we claim that
- (P2’)
given an sp-term s, every generated submodel rooted at an anonymous point of of type 2 contains only anonymous points of type 2.
Like in Theorem 4, we first establish ‘completeness with respect to TGDs’ for :
Lemma 10. Suppose that s and t are sp-terms. Then if maps homomorphically into the model (with preservation of roots), then the implication is derivable in .
Proof. Suppose that h is a rooted homomorphism from into . Suppose that is a point of such that is an anonymous point of type 1 in introduced by by trigger g (defined on ). Suppose that is the predecessor of in and are successors of in . Note that this can happen only in case , for , and all are equal. We say that a homomorphism from into is obtained by -surgery of h at if
is obtained from by changing
- -
-arrow between and into -arrow
- -
-arrows between and into -arrows for
- -
terms ‘sitting’ at in into their conjunction.
coincides with h on all points except
(here g is the trigger, and y is a variable of ).
We argue that in this case, the implication
is derivable in
. Indeed, we take the axiom
, apply the substitution
, inclusion
‘weakening’ from
to
, and then we ‘grow’ the common part of
h and
by the rules
We similarly define
-surgeries and argue that by a sequence of surgeries,
h may be reduced to a homomorphism
from
into
, which does not use any points of type 1. Thus we can apply Lemma 5 and derive the implication
as well as implications between the terms
corresponding to the intermediate steps of the surgeries. Finally, we apply the rule a few times
This argument is illustrated in
Figure 5. □
Proof of Theorem 5. Inclusion from right to left is proved in Lemma 4.
Now, take a strictly positive implication such that . By Proposition 3, it follows that . Therefore, there exists a rooted homomorphism h from into . Now, we argue that there exists a homomorphism from into . Suppose that holds in , is not anonymous, but is anonymous of type 2. By the iterative application of Lemma 9, we obtain that and . Therefore, by Lemma 8 there exists a homomorphism from the subtree of at x in the direction of y into , sending x to . We similarly deal with points x and y such that holds in , is not anonymous, but is anonymous of type 2. By applying this argument to all such pairs of points of , we obtain a homomorphism from into . Finally, by Lemma 10, we conclude that is derivable in . □
Theorem 6. There is no finite set of formulas Φ such tha .
Proof. This follows from the fact that in
the formula
is not derivable and a standard argument due to Tarski. □
Theorem 7. For logics where is the set of all additional axioms in with all ⋄ replaced by . Proof. The main remaining ingredient of the proof is ‘completeness of
with respect to the corresponding set of TGDS
’ (
because
stands for
). It follows from Theorem 35 of [
10], Proposition 3, and Kripke completeness of modal counterparts of logics in question. Indeed, if
is a rooted homomorphism from
into
, then by Proposition 3
is derivable in
, and by Theorem 35 (see also the text at the beginning of Section 2 of this paper) of [
10] any sp-implication in
is derivable in
.
Now we proceed as before. We assume that s and t are sp-terms such that there is a rooted homomophism h from into . Then using (P2’) for and the fact that there are no final points in , we transform h into a rooted homomorphism from into . Finally, we apply the corresponding ’completeness statement’ to conclude that is derivable in . □




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




