
On the Effects of Boundary Conditions in One-Dimensional Models of Hemodynamics


{kind=link}
Abstract
:1. Introduction
2. Model
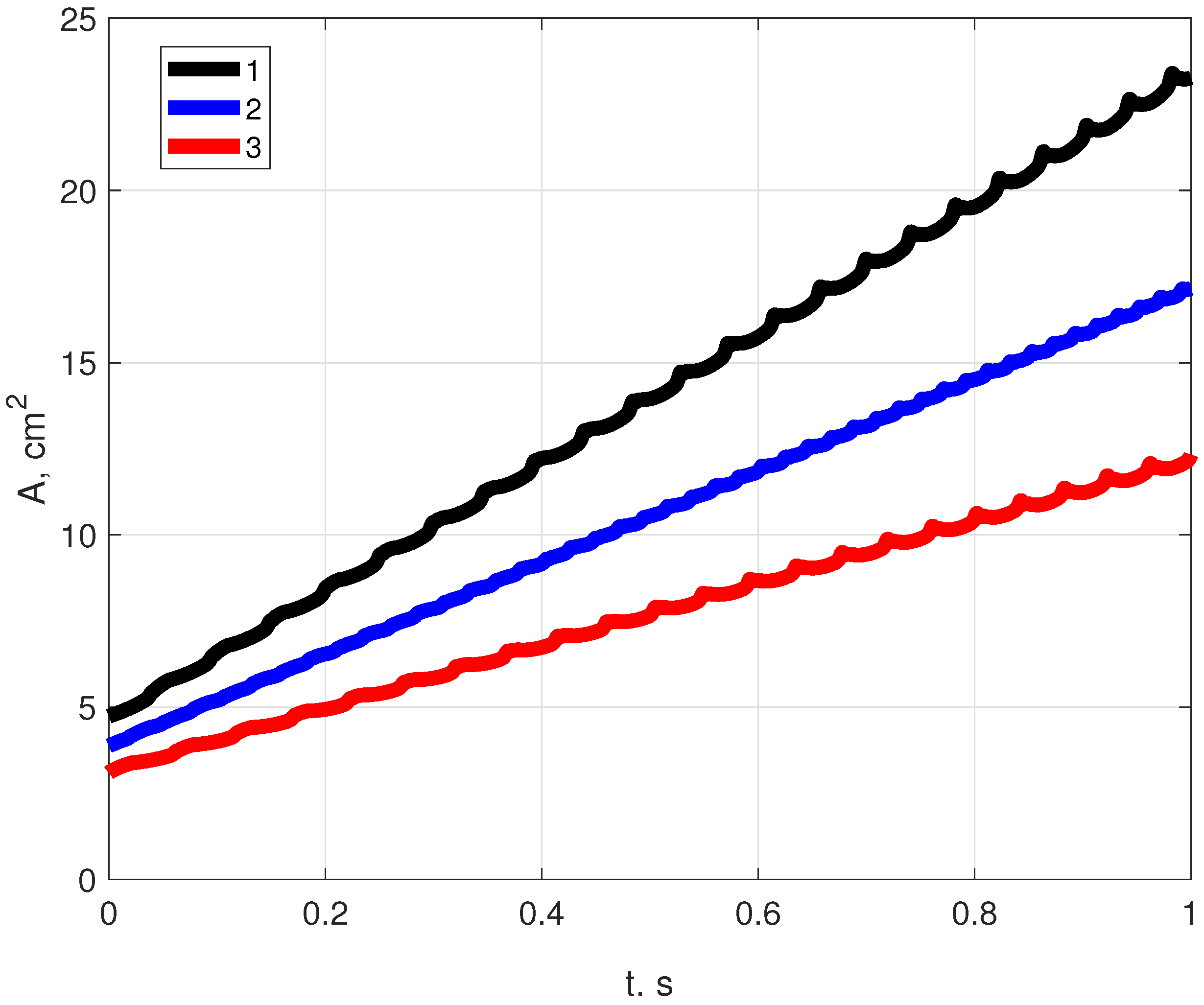
3. Results
3.1. Case of Boundary Conditions for q
3.2. Case of Periodic Boundary Conditions
3.2.1. Integral Estimation
3.2.2. Fourier Method
4. Discussion and Conclusions
- The integral estimation (12) for the solution in the case of the general form of the boundary conditions is obtained. As can be seen, the unphysical unbounded solutions can take place for the case of bounded functions , .
- The general theory of the integral inequalities for hyperbolic equations is presented in [35,36]. However, in the presented paper, the more exact estimations are presented for the specific example of the hyperbolic system, where the specific constants in exponentials are obtained. Moreover, for the boundary conditions only for q, the estimation (21), which is more accurate than the exponential function (the linear function of t), is obtained.As it is mentioned in [36], the energetic norm is presented by the square of the -norm of the solution. In the left parts of (12), (21), and (32), the integrals, which can be considered as squares of norms of functions, linearly related to the solutions, are presented. So, our estimations can be considered as some kind of energy inequalities for this specific type of hyperbolic system with the appropriate boundary conditions.
- For the periodic boundary conditions, the exact integral estimation (31) is obtained, which illustrates the correct behavior of the solution—it is bounded at . For this case of boundary conditions, the Fourier method for the analytical solution can be applied. Such analytical solutions can be used for the comparison of different 1D blood-flow models [27].
- The results obtained in the paper can be useful for the specialists on blood-flow modeling because they allow for an alternative view of the stated boundary conditions and can explain some of the problems that can arise in numerical simulations.
- In the numerical experiment, where the fully nonlinear model, used in many works, is considered, it is demonstrated that the situation described by the author’s theoretical results can be observed in practice, when the bounded initial and boundary conditions lead to the incorrect results from the physical point of view. So, it is important to correctly impose the boundary conditions for the practical predictive simulations. From the medical point of view, this means that the users of the software must choose such conditions carefully because in the opposite case, it can lead to the incorrect results.
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sharifzadeh, B.; Kalbasi, R.; Jahangiri, M.; Toghraie, D.; Karimipour, A. Computer modeling of pulsatile blood flow in elastic artery using a software program for application in biomedical engineering. Comput. Methods Prog. Biomed. 2020, 192, 105442. [Google Scholar] [CrossRef] [PubMed]
- Karimipour, A.; Toghraie, D.; Abdulkareem, L.A.; Alizadeh, A.; Zarringhalam, M.; Karimipour, A. Roll of stenosis severity, artery radius and blood fluid behavior on the flow velocity in the arteries: Application in biomedical engineering. Med. Hypotheses 2020, 144, 109864. [Google Scholar] [CrossRef] [PubMed]
- Audebert, C.; Bucur, C.; Bekheit, M.; Vibert, E.; Vignon-Clementel, I.; Gerbeau, J. Kinetic scheme for arterial and venous blood flow, and application to partial hepatectomy modeling. Comput. Methods Appl. Mech. Eng. 2017, 314, 102–125. [Google Scholar] [CrossRef] [Green Version]
- Marchandise, E.; Willemet, M.; Lacroix, V. A numerical hemodynamic tool for predictive vascular surgery. Med. Eng. Phys. 2009, 31, 131–144. [Google Scholar] [CrossRef]
- Formaggia, L.; Lamponi, D.; Quarteroni, A. One-dimensional models for blood flow in arteries. J. Eng. Math. 2003, 47, 251–276. [Google Scholar] [CrossRef]
- Toro, E.F. Brain venous haemodynamics, neurological diseases and mathematical modelling. A review. Appl. Math. Comput. 2015, 272, 542–579. [Google Scholar] [CrossRef]
- Canic, S.; Kim, E.H. Mathematical analysis of the quasilinear effects in a hyperbolic model blood flow through compliant axi-symmetric vessels. Math. Methods Appl. Sci. 2003, 26, 1161–1186. [Google Scholar] [CrossRef]
- Dobroserdova, T.; Liang, F.; Panasenko, G.; Vassilevski, Y. Multiscale models of blood flow in the compliant aortic bifurcation. Appl. Math. Lett. 2019, 93, 98–104. [Google Scholar] [CrossRef]
- Xiao, N.; Alastruey, J.; Figueroa, C. A systematic comparison between 1-D and 3-D hemodynamics in compliant arterial models. Int. J. Numer. Methods Biomed. Eng. 2014, 30, 203–231. [Google Scholar] [CrossRef] [Green Version]
- Caro, C.G.; Pedley, T.J.; Schroter, R.C.; Seed, W.A. The Mechanics of the Circulation, 2nd ed.; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Puelz, C.; Canic, S.; Riviere, B.; Rusin, C.G. Comparison of reduced models for blood flow using Runge—Kutta discontinuous Galerkin methods. Appl. Numer. Math. 2017, 115, 114–141. [Google Scholar] [CrossRef]
- Bertaglia, G.; Caleffi, V.; Valiani, A. Modeling blood flow in viscoelastic vessels: The 1D augmented fluid-structure interaction system. Comput. Methods Appl. Mech. Eng. 2020, 360, 112772. [Google Scholar] [CrossRef] [Green Version]
- Britton, J.; Xing, Y. Well-balanced discontinuous Galerkin methods for the one-dimensional blood flow through arteries model with man-at-eternal-rest and living-man equilibria. Comput. Fluids 2020, 203, 104493. [Google Scholar] [CrossRef]
- Favorskii, A.P.; Tygliyan, M.A.; Tyurina, N.N.; Galanina, A.M.; Isakov, V.A. Computational modeling of the propagation of hemodynamic impulses. Math. Models Comput. Simul. 2010, 2, 470–481. [Google Scholar] [CrossRef]
- Sheng, W.; Zheng, Q.; Zheng, Y. The Riemann problem for a blood-flow model in arteries. Commun. Comput. Phys. 2020, 27, 227–250. [Google Scholar] [CrossRef]
- Spiller, C.; Toro, E.F.; Vazquez-Cendon, M.E.; Contarino, C. On the exact solution of the Riemann problem for blood flow in human veins, including collapse. Appl. Math. Comput. 2017, 303, 178–189. [Google Scholar] [CrossRef]
- Toro, E.F.; Siviglia, A. Flow in collapsible tubes with discontinuous mechanical properties: Mathematical model and exact solutions. Commun. Comput. Phys. 2013, 13, 361–385. [Google Scholar] [CrossRef] [Green Version]
- Toro, E.F.; Muller, L.O.; Siviglia, A. Bounds for wave speeds in the Riemann problem: Direct theoretical estimates. Comput. Fluids 2020, 209, 104640. [Google Scholar] [CrossRef]
- Wang, Z.; Li, G.; Delestre, O. Well-balanced finite difference weighted essentially non-oscillatory schemes for the blood-flow model. Int. J. Numer. Meth. Fluids 2016, 82, 607–622. [Google Scholar] [CrossRef] [Green Version]
- Mohammad, S.; Hessam, B.; Kaveh, L. Physics-informed neural networks for brain hemodynamic predictions using medical imaging. IEEE Trans. Med. Imaging 2022, 41, 2285–2303. [Google Scholar]
- Pfaller, M.R.; Pham, J.; Verma, A.; Pegolotti, L.; Wilson, N.M.; Parker, D.W.; Yang, W.; Marsden, A.L. Automated generation of 0D and 1D reduced-order models of patient-specific blood flow. Int. J. Numer. Meth. Biomed. Eng. 2022, 38, e3639. [Google Scholar] [CrossRef]
- Toro, E.F.; Celant, M.; Zhang, Q.; Contarino, C.; Agarwal, N.; Linninger, A.; Muller, L.O. Cerebrospinal fluid dynamics coupled to the global circulation in holistic setting: Mathematical models, numerical methods and applications. Int. J. Numer. Meth. Biomed. Eng. 2022, 38, e3532. [Google Scholar] [CrossRef] [PubMed]
- Abdullateef, S.; Mariscal-Harana, J.; Khir, A.W. Impact of tapering of arterial vessels on blood pressure, pulse wave velocity, and wave intensity analysis using one-dimensional computational model. Int. J. Numer. Meth. Biomed. Eng. 2021, 37, e3312. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Matthys, K.S.; Alastruey, J.; Peiro, J.; Khir, A.W.; Segers, P.; Verdonc, P.R.; Parker, K.H.; Sherwin, S.J. Pulse wave propagation in a model human arterial network: Assessment of 1-D numerical simulations against in vitro measurements. J. Biomech. 2007, 40, 3476–3486. [Google Scholar] [CrossRef] [PubMed]
- Alastruey, J.; Khir, A.W.; Matthys, K.S.; Segers, P.; Sherwin, S.J.; Verdonc, P.R.; Parker, K.H.; Peiro, J. Pulse wave propagation in a model human arterial network: Assessment of 1-D visco-elastic simulations against in vitro measurements. J. Biomech. 2011, 44, 2250–2258. [Google Scholar] [CrossRef] [PubMed]
- Krivovichev, G.V. Computational analysis of one-dimensional models for simulation of blood flow in vascular networks. J. Comput. Sci. 2022, 62, 101705. [Google Scholar] [CrossRef]
- Krivovichev, G.V. Comparison of inviscid and viscid one-dimensional models of blood flow in arteries. Appl. Math. Comput. 2022, 418, 126856. [Google Scholar] [CrossRef]
- Ashmetkov, I.V.; Mukhin, S.I.; Sosnin, N.V.; Favorskii, A.P.; Khrulenko, A.B. Analysis and comparison of some analytic and numerical solutions of hemodynamic problems. Differ. Equ. 2000, 36, 1021–1026. [Google Scholar] [CrossRef]
- Ashmetkov, I.V.; Mukhin, S.I.; Sosnin, N.V.; Favorskii, A.P. A boundary value problem for the linearized haemodynamic equations on a graph. Differ. Equ. 2004, 40, 94–104. [Google Scholar] [CrossRef]
- Paquerot, J.-F.; Remoissenet, M. Dynamics of nonlinear blood pressure waves in large arteries. Phys. Lett. A 1994, 194, 77–82. [Google Scholar] [CrossRef]
- Ilyin, O. Nonlinear pressure-velocity waveforms in large arteries, shock waves and wave separation. Wave Motion 2019, 84, 56–67. [Google Scholar] [CrossRef] [Green Version]
- Maity, D.; Raymond, J.-P.; Roy, A. Existence and uniqueness of maximal strong solution of a 1D blood flow in a network of vessels. Nonl. Anal. Real World Appl. 2022, 63, 103405. [Google Scholar] [CrossRef]
- Mukhin, S.I.; Menyailova, M.A.; Sosnin, N.V.; Favorskii, A.P. Analytic study of stationary hemodynamic flows in an elastic vessel with friction. Differ. Equ. 2007, 43, 1011–1015. [Google Scholar] [CrossRef]
- Tikhonov, A.N.; Samarskii, A.A. Equations of Mathematical Physics; Dover Publications Inc.: New York, NY, USA, 1990. [Google Scholar]
- Godunov, S.K. The Equations of Mathematical Physics; Nauka: Moscow, Russia, 1979. (In Russian) [Google Scholar]
- Lax, P.D. Hyperbolic Partial Differential Equations; AMS: Providence, RI, USA, 2006. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krivovichev, G.V. On the Effects of Boundary Conditions in One-Dimensional Models of Hemodynamics. Mathematics 2022, 10, 4058. https://doi.org/10.3390/math10214058
Krivovichev GV. On the Effects of Boundary Conditions in One-Dimensional Models of Hemodynamics. Mathematics. 2022; 10(21):4058. https://doi.org/10.3390/math10214058
Chicago/Turabian StyleKrivovichev, Gerasim V. 2022. "On the Effects of Boundary Conditions in One-Dimensional Models of Hemodynamics" Mathematics 10, no. 21: 4058. https://doi.org/10.3390/math10214058
APA StyleKrivovichev, G. V. (2022). On the Effects of Boundary Conditions in One-Dimensional Models of Hemodynamics. Mathematics, 10(21), 4058. https://doi.org/10.3390/math10214058