5.1. Computational Results
In
Table 1,
Table 2,
Table 3,
Table 4,
Table 5,
Table 6,
Table 7,
Table 8,
Table 9,
Table 10,
Table 11,
Table 12,
Table 13,
Table 14 and
Table 15, “Best”, “Mean”, “Worst”, “SD”, and “NFEs” symbolize, respectively, the best-found value, the average result, the worst-reached result, standard deviation values, and the number of function evaluations. The best results among the compared optimizers are shown in bold in these tables. The capacity of an optimizer to accomplish the best-known solution is decided by the best results. Algorithmic robustness or algorithmic stability is the capability of an algorithm to constantly converge to low values of objective functions without depending on the search space and initial solutions. Average and standard deviation results decide the stability or robustness of an optimizer. The NFEs represent the measure of the convergence rate. In
Table 1,
Table 2,
Table 3 and
Table 4, NA denotes that results are not available in the respective paper.
The speed reducer design problem was lately solved by the mine blast algorithm (MBA) [
39], enhanced Jaya (EJAYA) [
40], improved accelerated PSO (IAPSO) [
32], crossover-based ABC (CB-ABC) [
23] and I-ABC greedy [
25]. The experimental results achieved by the HSCA, SCA, and ABC, and these optimizers are presented in
Table 1.
The results given in
Table 1 indicate that the HSCA is capable of greatly enhancing the capacity of the SCA and ABC to reach the optimal result, as well as the stability of these algorithms. In addition, exclusively, the IAPSO and HSCA could accomplish the best-rounded VTA in all runs. The HSCA converges faster to the optimal solution than all the compared optimizers, except for the IAPSO algorithm. The IAPSO and HSCA used the same NFEs to achieve these results.
The tension/compression spring design problem was lately solved by using the following optimizers: the MBA [
39], elephant clan optimization (ECO) [
41] atomic orbital search (AOS) [
42], queuing search algorithm (QSA) [
43], IAPSO [
32], improved SCA (ISCA) [
44], CB-ABC [
23] and I-ABC greedy [
25]. The statistical results achieved by the HSCA, SCA, ABC, and other metaheuristic algorithms are given in
Table 2.
From the results presented in
Table 2 it can be observed that only the HSCA reached the best-rounded VTA in all runs. The number of function evaluations needed by the HSCA to solve the tension/compression spring design problem is less or equal to that of the six optimizers (AOS, QSA, EJAYA, CB-ABC, ABC, and SCA), and higher compared to the MBA, ECO, IAPSO, and IABC-greedy. For the ISCA optimizer, the number of function evaluations is not reported in the respective paper.
Table 2.
Performance of HSCA and other optimizers for the tension/compression spring design problem.
Table 2.
Performance of HSCA and other optimizers for the tension/compression spring design problem.
| Algo. | Best | Mean | Worst | SD | NFEs |
|---|
| MBA | 0.012665 | 0.012713 | 0.012900 | 6.30 × | 7650 |
| ECO | 0.012665 | 0.012709 | 0.01278 | 4.36 × | 11,484 |
| AOS | 0.012665233 | 0.012737649 | 0.013596859 | 0.000121146 | 200,000 |
| QSA | 0.01266523279 | 0.01266666921 | 0.01267436276 | 2.5895 × | 18,000 |
| EJAYA | 0.012665 | 0.012668 | 0.012687 | 4.6331 × | 15,000 |
| IAPSO | 0.01266523 | 0.013676527 | 0.01782864 | 1.573 × | 2000 |
| ISCA | 0.012667 | NA | NA | NA | NA |
| I-ABC greedy | 0.012665 | 0.013731147 | 0.012665 | 1.12× | 2000 |
| CB-ABC | 0.012665 | 0.012671 | NA | 1.42 × | 15,000 |
| ABC | 0.012665 | 0.0129644 | 0.01344 | 2.09 × | 30,000 |
| SCA | 0.012724 | 0.012855 | 0.0130922 | 7.6976 × | 15,000 |
| HSCA | 0.012665 | 0.012665 | 0.012665 | 3.49× | 15,000 |
Table 3.
Performance of HSCA and other optimizers for the pressure vessel design problem.
Table 3.
Performance of HSCA and other optimizers for the pressure vessel design problem.
| Algo. | Best | Mean | Worst | SD | NFEs |
|---|
| ECO | 6059.71448 | 6325.50262 | 7466.4068 | 398.99839 | 21,750 |
| QSA | 6059.7143350484 | 6078.3193234831 | 6370.7797127298 | 61.5629 | 25,000 |
| IAPSO | 6059.7143 | 6068.7539 | 6090.5314 | 14.0057 | 7500 |
| ISCA | 6059.7489 | NA | NA | NA | NA |
| I-ABC greedy | 6059.7142 | 6067.816 | 6086.982 | 19.044 | 8000 |
| CB-ABC | 6059.714335 | 6126.623676 | NA | 1.14 × | 15,000 |
| ABC | 6060.974518 | 6282.680193 | 7017.127406 | 2.43 × | 30,000 |
| SCA | 6119.1385 | 6379.0104 | 7101.9145 | 2.22 × | 7500 |
| HSCA | 6059.7143 | 6060.2669 | 6068.3329 | 1.61 | 7500 |
Table 4.
Performance of HSCA and other optimizers for the welded beam design problem.
Table 4.
Performance of HSCA and other optimizers for the welded beam design problem.
| Algo. | Best | Mean | Worst | SD | NFEs |
|---|
| FA | 1.7312065 | 1.8786560 | 2.3455793 | 0.2677989 | 50,000 |
| MBA | 1.724853 | 1.724853 | 1.724853 | 6.94× | 47,340 |
| ECO | 1.724856 | 1.72509 | 1.7256 | 4.0663 × | 21,924 |
| AOS | 1.724852309 | 1.725673538 | 1.732516334 | 0.024786984 | 200,000 |
| QSA | 1.7248523085973 | 1.7248523085973 | 1.7248523085973 | 1.1215× | 18,000 |
| EJAYA | 1.7248523086 | 1.7248523093 | 1.7248523105 | 5.5631 × | 24,000 |
| IAPSO | 1.7248523 | 1.7248528 | 1.7248624 | 2.02 × | 12,500 |
| I-ABC greedy | 1.724852 | 1.724865 | 1.724910 | 1.92 × | 14,500 |
| CB-ABC | 1.724852 | 1.724852 | NA | 2.38 × | 15,000 |
| ABC | 1.724852 | 1.757544 | 1.896621 | 4.1 × | 30,000 |
| SCA | 1.7371620826 | 1.7571107369 | 1.7904976725 | 1.24 × | 12,000 |
| HSCA | 1.7248523086 | 1.7248523086 | 1.7248523086 | 1.46 × | 12,000 |
The pressure vessel design problem was lately solved by the following optimizers: ECO [
41], QSA [
43], IAPSO [
32], ISCA [
44] CB-ABC [
23] and I-ABC greedy [
25]. The statistical results reached by the HSCA, SCA, ABC, and other optimizers are presented in
Table 3. As it can be noticed from
Table 3, the best-rounded VTA was obtained by all compared optimizers, except for the ECO, ISCA, ABC, and SCA. It can also be observed that the HSCA achieved the smallest average and standard deviation results among all compared optimizers with the smallest number of NFEs.
The welded beam design problem was lately examined by employing diverse metaheuristic algorithms, including the use of the FA [
36], MBA [
39], ECO [
41], AOS [
42], QSA [
43], EJAYA [
40], IAPSO [
32], CB-ABC [
23] and I-ABC greedy [
25]. The statistical results achieved by the HSCA, SCA, ABC, and other optimizers are given in
Table 4. In
Table 4, NA denotes that results are not available in the respective paper.
Table 5.
Performance of HSCA and other optimizers for the gear train design problem.
Table 5.
Performance of HSCA and other optimizers for the gear train design problem.
| Algo. | Best | Mean | Worst | SD | NFEs |
|---|
| MBA | 2.700857× | 2.471635 × | 2.062904× | 3.94 × | 1120 |
| IAPSO | 2.700857× | 5.492477 × | 1.827380× | 6.36 × | 800 |
| I-ABC greedy | 2.702 × | 6.452 × | 1.68 × | 5.29 × | 60 |
| ABC | 2.700857× | 1.402023 × | 1.239641 × | 2.07 × | 750 |
| SCA | 2.700857× | 3.771823 × | 5.041463 × | 7.97 × | 750 |
| HSCA | 2.700857× | 1.50506× | 1.312515× | 2.30 × | 750 |
Table 6.
Performance of HSCA and other optimizers for the stepped cantilever beam problem design problem.
Table 6.
Performance of HSCA and other optimizers for the stepped cantilever beam problem design problem.
| Algo. | Best | Mean | Worst | SD | NFEs |
|---|
| FA | 63,893.52578 | 64,144.75312 | 64,262.99420 | 175.91879 | 50,000 |
| diversity-guided PSO | 63,893.43 | 63,893.43080 | 63,893.43080 | 0.00000 | 50,000 |
| I-ABC greedy | 64,599.65 | 68,263.83 | 69,877.91 | 5.97 × | 9700 |
| ABC | 63,893.430796 | 64,362.230828 | 68,333.430795 | 1.15 × | 45,000 |
| SCA | 64,143.539011 | 64,640.851769 | 65,275.647478 | 2.57 × | 45,000 |
| HSCA | 63,893.430796 | 63,893.430796 | 63,893.430796 | 2.18× | 45,000 |
Table 7.
Performance of HSCA and other optimizers for the multiple disc clutch brake design problem.
Table 7.
Performance of HSCA and other optimizers for the multiple disc clutch brake design problem.
| Algo. | Best | Mean | Worst | SD | NFEs |
|---|
| Rao-1 | 0.313657 | 0.321780 | 0.392071 | 0.009985 | 600 |
| Rao-2 | 0.313657 | 0.315413 | 0.339999 | 0.00668 | 600 |
| Rao-3 | 0.313657 | 0.319783 | 0.392071 | 0.016399 | 600 |
| AOS | 0.235242480 | 2.35 × | 2.35 × | 6.45× | 200,000 |
| IAPSO | 0.313656 | 0.313656 | 0.313656 | 1.13 × | 400 |
| I-ABC greedy | 0.313656 | 0.313656 | 0.313656 | 1.27 × | 750 |
| ABC | 0.2352424579 | 0.2362422383 | 0.2440640500 | 2.16 × | 600 |
| SCA | 0.2352424579 | 0.2403031112 | 0.2547234739 | 4.79 × | 600 |
| HSCA | 0.2352424579 | 0.2352424579 | 0.2352424579 | 1.38 × | 600 |
Table 8.
Performance of HSCA and other optimizers for the cantilever beam design problem.
Table 8.
Performance of HSCA and other optimizers for the cantilever beam design problem.
| Algo. | Best | Mean | Worst | SD | NFEs |
|---|
| AOS | 1.339957 | 1.351954 | 1.491711 | 0.02499743 | 100,000 |
| ABC | 1.3399770 | 1.3400402 | 1.3403453 | 6.25 × | 12,000 |
| SCA | 1.3406087 | 1.3431266 | 1.3467008 | 1.57 × | 12,000 |
| HSCA | 1.3399564 | 1.3399565 | 1.3399568 | 9.21× | 12,000 |
From
Table 4 it can be seen that all considered optimizers obtain the best-rounded VTA, except the FA, ECO, and SCA. The HSCA, EJAYA, QSA, and MBA reached the mean results, equal to the best-rounded VTA among all compared techniques. Even though the HSCA obtained a worse standard deviation value than the QSA and MBS, the HSCA obtained these statistical results with the minimal of NFEs between considered optimizers.
The gear train design problem was solved by applying the MBA [
39], IAPSO [
35] and I-ABC greedy [
25]. The comparative results obtained by the HSCA, SCA, ABC, and other approaches are presented in
Table 5. From
Table 5 it can be observed that all considered optimizers obtain the optimal solution, except the I-ABC greedy algorithm. The SCA, ABC, and HSCA reached the optimal solution with fewer NFEs than the MBA and IAPSO. Additionally, the proposed HSCA obtained the smallest average and standard deviation results of the remaining five considered optimizers.
The stepped cantilever beam problem was lately solved by employing the FA [
36], diversity-guided PSO [
35] and I-ABC greedy [
25] approaches. The results reached by the HSCA, SCA, ABC, and other optimizers are presented in
Table 6. The presented results show that only the HSCA, ABC, and diversity-guided PSO could obtain the best-rounded VTA. The ABC and HSCA reached the best-rounded VTA with fewer NFEs than the diversity-guided PSO. Also, only the HSCA and diversity-guided PSO accomplished the best-rounded VTA in all runs.
Table 9.
Performance of HSCA and other optimizers for the helical compression spring design problem.
Table 9.
Performance of HSCA and other optimizers for the helical compression spring design problem.
| Algo. | Best | Mean | Worst | SD | NFEs |
|---|
| FA | 2.658575665 | 4.3835958 | 7.8162919 | 4.6076313 | 75,000 |
| diversity-guided PSO | 2.658559 | 2.658890 | 2.660784 | 0.000611 | 50,000 |
| Rao-1 | 2.658559 | 2.658675 | 2.659211 | 1.41 × | 75,000 |
| Rao-2 | 2.658559 | 2.666750 | 2.699494 | 1.67 × | 75,000 |
| Rao-3 | 2.658559 | 2.665386 | 2.699494 | 1.55 × | 75,000 |
| ABC | 2.658559 | 2.658910 | 2.673552 | 2.12 × | 75,000 |
| SCA | 2.658560 | 2.658636 | 2.659086 | 1.09 × | 75,000 |
| HSCA | 2.658559 | 2.658559 | 2.658559 | 2.66× | 75,000 |
Table 10.
Performance of HSCA and other optimizers for the hollow shaft design problem.
Table 10.
Performance of HSCA and other optimizers for the hollow shaft design problem.
| Algo. | Best | Mean | Worst | SD | NFEs |
|---|
| Rao-1 | 2.370398 | 2.370398 | 2.370398 | 0 | 5000 |
| Rao-2 | 2.370398 | 2.370398 | 2.370398 | 0 | 5000 |
| Rao-3 | 2.370398 | 2.370398 | 2.370398 | 0 | 5000 |
| ABC | 2.370398244 | 2.370443611 | 2.370652102 | 6.17 × | 3000 |
| SCA | 2.382173022 | 2.429340456 | 2.510303871 | 2.89 × | 3000 |
| HSCA | 2.37039813 | 2.37039813 | 2.37039813 | 1.59 × | 3000 |
Table 11.
Performance of HSCA and other optimizers for the hydrostatic thrust bearing design problem.
Table 11.
Performance of HSCA and other optimizers for the hydrostatic thrust bearing design problem.
| Algo. | Best | Mean | Worst | SD | NFEs |
|---|
| EJAYA | 1625.442764498248 | 1631.509586823626 | 1767.660483606390 | 26.27208859624 | 150,000 |
| ABC | 1723.9870064 | 1967.02318543 | 2351.79562005 | 1.34 × | 75,000 |
| SCA | 1833.12880218 | 2085.518614380 | 2268.47587046 | 1.05 × | 75,000 |
| HSCA | 1625.44275908 | 1625.44275908 | 1625.44275908 | 1.99× | 75,000 |
The multiple-disc clutch brake design problem was lately solved by the Rao-1, Rao-1, Rao-3 [
4], AOS [
42], IAPSO [
32], I-ABC greedy [
25] algorithms. The comparative results obtained by the HSCA, SCA, ABC, and other methods are presented in
Table 7. From
Table 7 it can be seen that the best-known rounded VTA were obtained only by the ABC, SCA, and HSCA with the same number of NFEs. Moreover, the HSCA reached smaller average and standard deviation values concerning the other eight optimizers.
For the cantilever beam design problem, the global optimum result 1.339956367 was found in [
34]. This design problem was lately solved by the AOS algorithm [
45]. The statistical results of the AOS, ABC, SCA, and HSCA are given in
Table 8. Results arranged in
Table 8 confirm that only the proposed HSCA can find the best-rounded solution. Additionally, the HSCA obtained smaller average and standard deviation values than the other compared optimizers with the smallest NFEs.
Table 12.
Performance of HSCA and other optimizers for the Belleville spring design problem.
Table 12.
Performance of HSCA and other optimizers for the Belleville spring design problem.
| Algo. | Best | Mean | Worst | SD | NFEs |
|---|
| MBA | 1.9796747 | 1.984698 | 2.005431 | 7.7800 × | 10,600 |
| diversity-guided PSO | 1.979675 | 1.979675 | 1.979675 | 0.000000 | 50,000 |
| ABC | 1.9904011 | 2.0234035 | 2.1194233 | 2.77 × | 15,000 |
| SCA | 2.0130731 | 2.1238541 | 2.2075343 | 3.63 × | 15,000 |
| HSCA | 1.9796747 | 1.9796747 | 1.9796748 | 3.84× | 15,000 |
Table 13.
Performance of HSCA and other optimizers for the car side impact design problem.
Table 13.
Performance of HSCA and other optimizers for the car side impact design problem.
| Algo. | Best | Mean | Worst | SD | NFEs |
|---|
| FA | 22.84298 | 22.89376 | 24.06623 | 0.16667 | 20,000 |
| EJAYA | 22.8429707 | 22.9439823 | 23.2619126 | 1.7098 × | 27,000 |
| ABC | 22.8437697 | 22.86236564 | 23.0056316 | 2.38 × | 24,000 |
| SCA | 23.0621090 | 23.3790495 | 23.7173399 | 1.44 × | 24,000 |
| HSCA | 22.8429702 | 22.8429744 | 22.8429845 | 3.12× | 24,000 |
Table 14.
Performance of HSCA and other optimizers for the gas transmission compressor design problem.
Table 14.
Performance of HSCA and other optimizers for the gas transmission compressor design problem.
| Algo. | Best | Mean | Worst | SD | NFEs |
|---|
| AOS | 2,964,895.417 | 2,965,102.327 | 2,966,483.832 | 251.8360974 | 200,000 |
| ABC | 2,964,954.101 | 2,965,486.819 | 2,966,916.960 | 4.79 × | 8000 |
| SCA | 2,965,653.755 | 2,972,099.03 | 2,983,981.646 | 3.52 × | 8000 |
| HSCA | 2,964,895.4173 | 2,964,895.4173 | 2964895.4173 | 2.46× | 8000 |
Table 15.
Performance of HSCA and other optimizers for the reinforced concrete beam design problem.
Table 15.
Performance of HSCA and other optimizers for the reinforced concrete beam design problem.
| Algo. | Best | Mean | Worst | SD | NFEs |
|---|
| FA | 359.2080 | 460.706 | 669.150 | 80.73870 | 25,000 |
| diversity-guided PSO | 359.2080 | 359.2080 | 359.2080 | 0.0000 | 20,000 |
| QSA | 359.20800 | 359.20800 | 359.20800 | 5.74205 × | 10,000 |
| ABC | 359.2080 | 359.34379 | 362.6340 | 5.22 × | 4500 |
| SCA | 359.2116 | 360.5925 | 363.0331 | 1.13 | 4500 |
| HSCA | 359.2080 | 359.2080 | 359.2080 | 5.82 × | 4500 |
The helical compression spring design problem was lately solved by FA method [
36], diversity-guided PSO [
35], Rao-1, Rao-1, and Rao-3 [
4].
Table 9 presents the comparative results obtained by the FA, diversity-guided PSO, Rao-1, Rao-1, Rao-3, ABC, SCA, and HSCA. From these statistical results, it can be noticed that most optimizers reached the best-rounded VTA. The only exceptions are the FA and SCA approaches which found slightly worse best results. The diversity-guided PSO converges to the best VTA faster than other compared optimizers. On the other hand, the proposed HSCA produced minimal mean and standard deviation results concerning the other seven metaheuristic algorithms.
The comparative results reached by the Rao-1, Rao-1, Rao-3 [
4], ABC, SCA, and HSCA for the hollow shaft design problem are given in
Table 10. It can be observed that each metaheuristic approach, except the SCA, was capable to obtain the best-rounded VTA. Between these optimizers, only Rao-1, Rao-1, Rao-3, and HSCA accomplished the best-rounded VTA in each run. The HSCA used the smallest NFEs to achieve these results.
Results reached by the EJAYA [
40], ABC, SCA, and HSCA for the hydrostatic thrust bearing design problem are presented in
Table 11. From
Table 11 it can be observed that HSCA found the best-rounded VTA and the best average and standard deviation results among all compared optimizers. Also, the HSCA reached these results with the smallest NFEs.
The Belleville spring design problem was lately solved by the MBA [
39] and diversity-guided PSO [
35].
Table 12 presents the comparative results obtained by the MBA, diversity-guided PSO, ABC, SCA, and HSCA. The best VTA was obtained by the MBA, diversity-guided PSO, and HSCA optimizers. The MBA obtained the best VTA with the smallest NFEs, but only the diversity-guided PSO and HSCA reached the best-rounded solution in each run among all compared optimizers.
The car side impact design problem was lately solved by the FA [
36] and EJAYA [
40]. The statistical results achieved by the FA, EJAYA, SCA, ABC, and HSCA are arranged in
Table 13. From
Table 13 it is observable that only the HSCA can find the best-rounded solution. Also, the proposed HCSA obtained smaller average and standard deviation values than the other compared optimizers. The HSCA outperforms the EJAYA, ABC, and SCA in computational efficiency.
The gas transmission compressor design problem was lately solved by the AOS algorithm [
45]. The comparative results of the AOS, ABC, SCA, and HSCA are presented in
Table 14. From
Table 14 it can be observed that the HSCA and AOS can find the best-rounded solution. Also, the HSCA performs more stable and converges faster to the optimal solution than the other compared optimizers.
The comparative results obtained by the FA method [
36], diversity-guided PSO [
35], QSA [
43], ABC, SCA, and HSCA for the reinforced concrete beam design problem are presented in
Table 15. From
Table 15, it can be noticed that just the proposed HSCA, diversity-guided PSO, and QSA obtained the best-rounded solution in each run. The HSCA achieved the best VTA with the smallest NFEs in comparison with the other five optimizers.
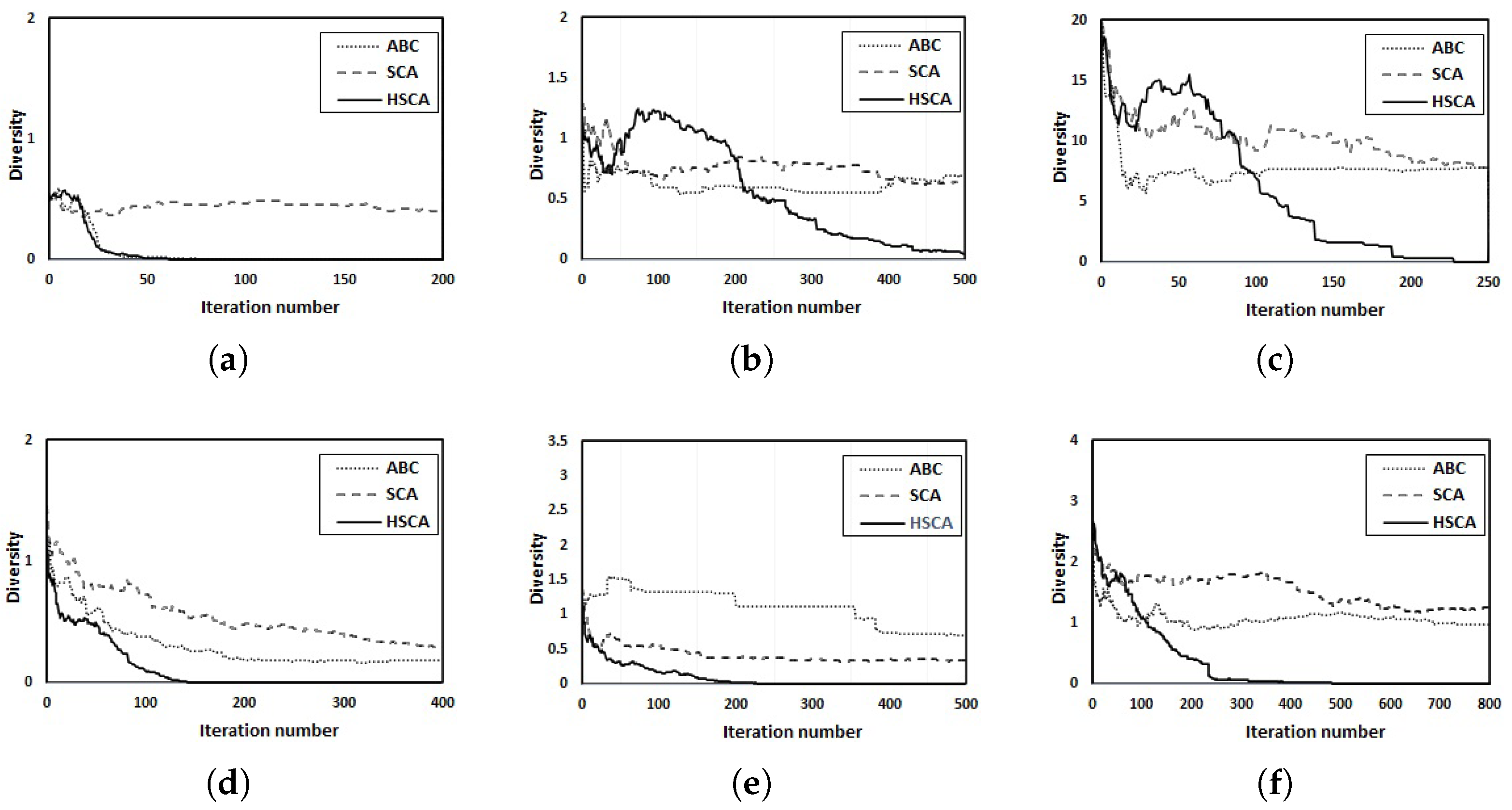
Figure 1 demonstrates six convergence curves of the average solutions achieved by the ABC, SCA, and HSCA through 50 runs for specific design problems. This figure indicates that the proposed HSCA converges faster than the ABC and SCA on the chosen design problems. The statistical analysis derived by Wilcoxon’s test among HSCA and SCA and among HSCA and ABC for these fifteen design problems at the
significance level obtained the
p value
. A summary of the results obtained by HSCA shows that our proposed approach can significantly enhance the performance of SCA and ABC concerning the quality of the reached results, stability, and computational efficiency for all fifteen design problems.
Table 16 presents results based on the performance of metaheuristic optimizers for fifteen design problems. In
Table 16 “Best”, “Mean” and “Worst” symbolize, respectively, optimizers which achieved the “best” best, the “best” mean and the “best” worst solutions, while “NFEs” represent optimizers that reached the “best” best solution for the smallest NFEs. From
Table 16 it can be observed that the HSCA optimizer reached the “best“ best, mean and worst solutions for twelve problems (speed reducer, pressure vessel, welded beam, gear train, stepped cantilever beam, multiple disc clutch brake, cantilever beam, hollow shaft, hydrostatic thrust bearing, car side impact, gas transmission compressor, and reinforced concrete beam) with the smallest NFEs. For the tension/compression spring problem, the IAPSO and I-ABC greedy obtained the “best” best solution with the lower NFEs than the HSCA. For the helical compression spring problem, the diversity-guided PSO reached the “best” best solution with the lower NFEs than the HSCA, while for the Belleville spring problem, the MBA obtained the “best“ best solution with the lower NFEs than the HSCA. However, the HSCA showed good performance in solving these three design problems, since it reached the best-rounded VTA in each run with acceptable NFEs. It can be concluded that the comparative results with the other metaheuristic optimizers showed that the HSCA has efficient performance regarding the quality and stability of the results, and convergence speed.


 ,
, 



{kind=link}
{kind=link}

