
Methodology of Plasma Shape Reachability Area Estimation in D-Shaped Tokamaks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Background
1.2. Motivation and Novelty
1.3. State-of-the-Art and Beyond-the-State-of-the-Art
1.4. Hypothesis
1.5. Paper Organization
2. Problem Description
2.1. Globus-M2 Tokamak
2.2. Plasma Control System Structure
2.3. Linear Plasma Model
2.4. Problem Statements
- Tuning of the robust PID-controllers of the vertical and horizontal plasma positions.
- Estimation of the size of the unstable vertical plasma position controllability region.
- Estimation of the plasma shape reachability area
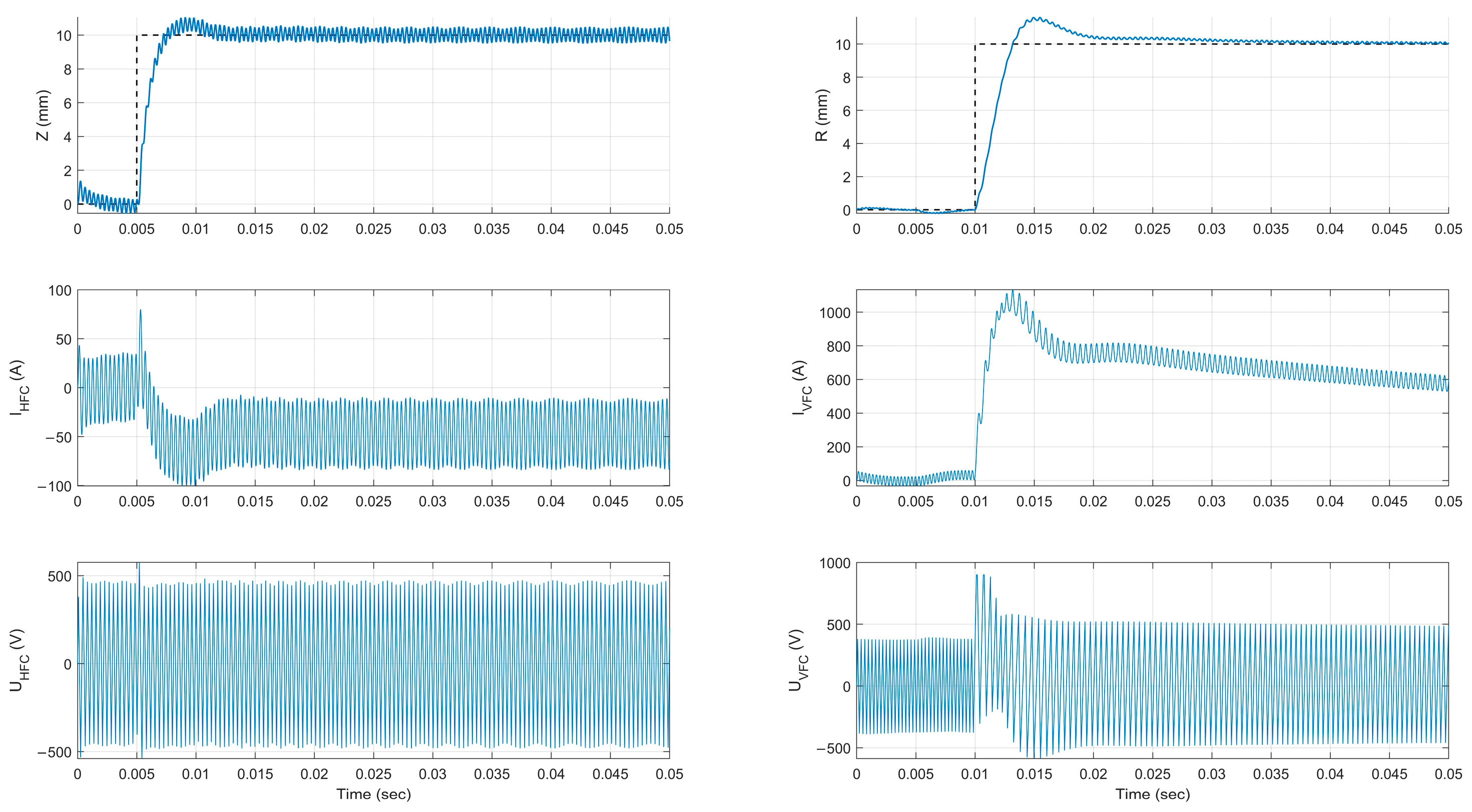
3. Plasma Position PID-Controllers Tuning
4. Estimation of the Controllability Region of the Unstable Vertical Plasma Position
4.1. Statement of the Estimation Problem
4.2. Analytical Estimation
4.3. Numerical Simulations
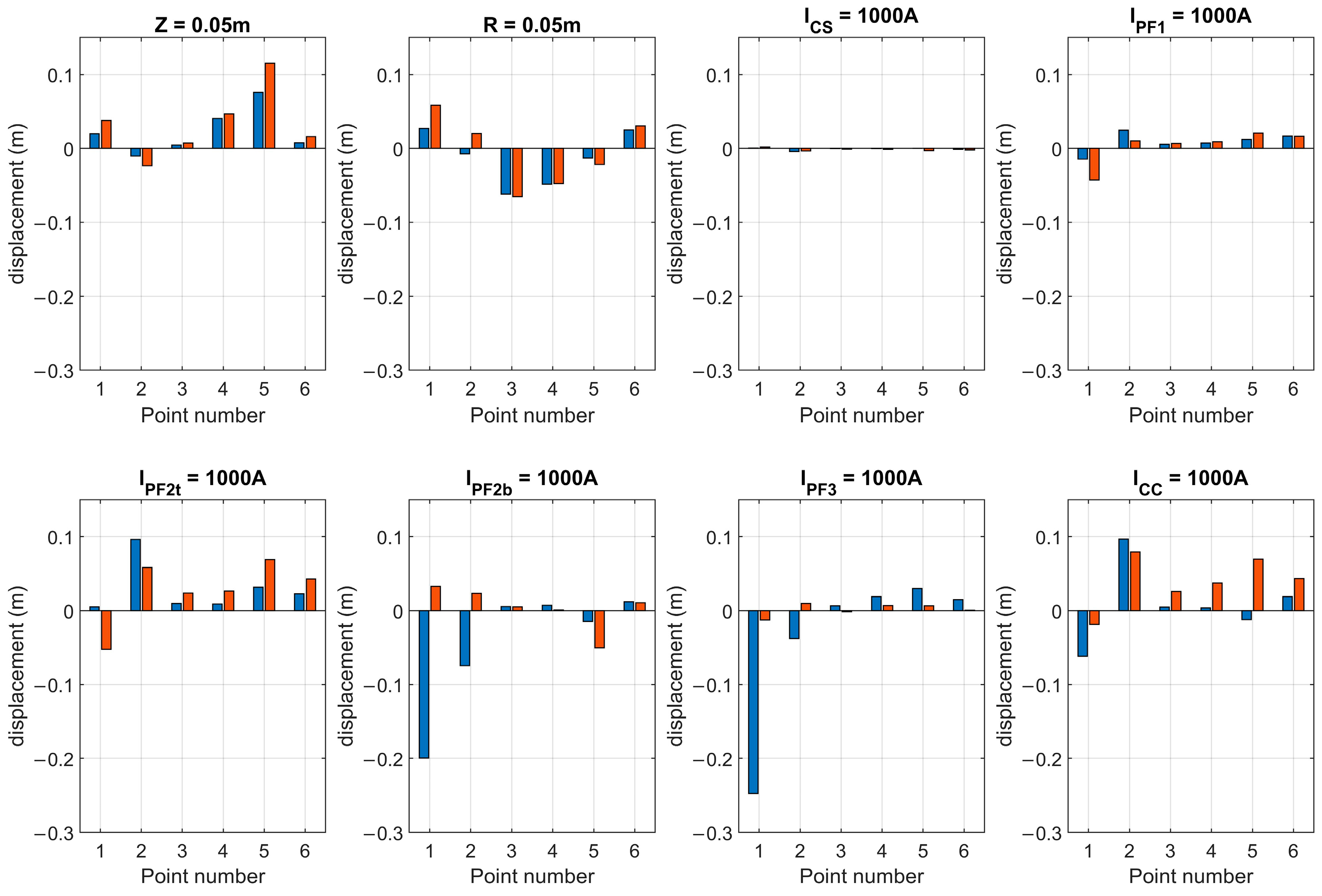
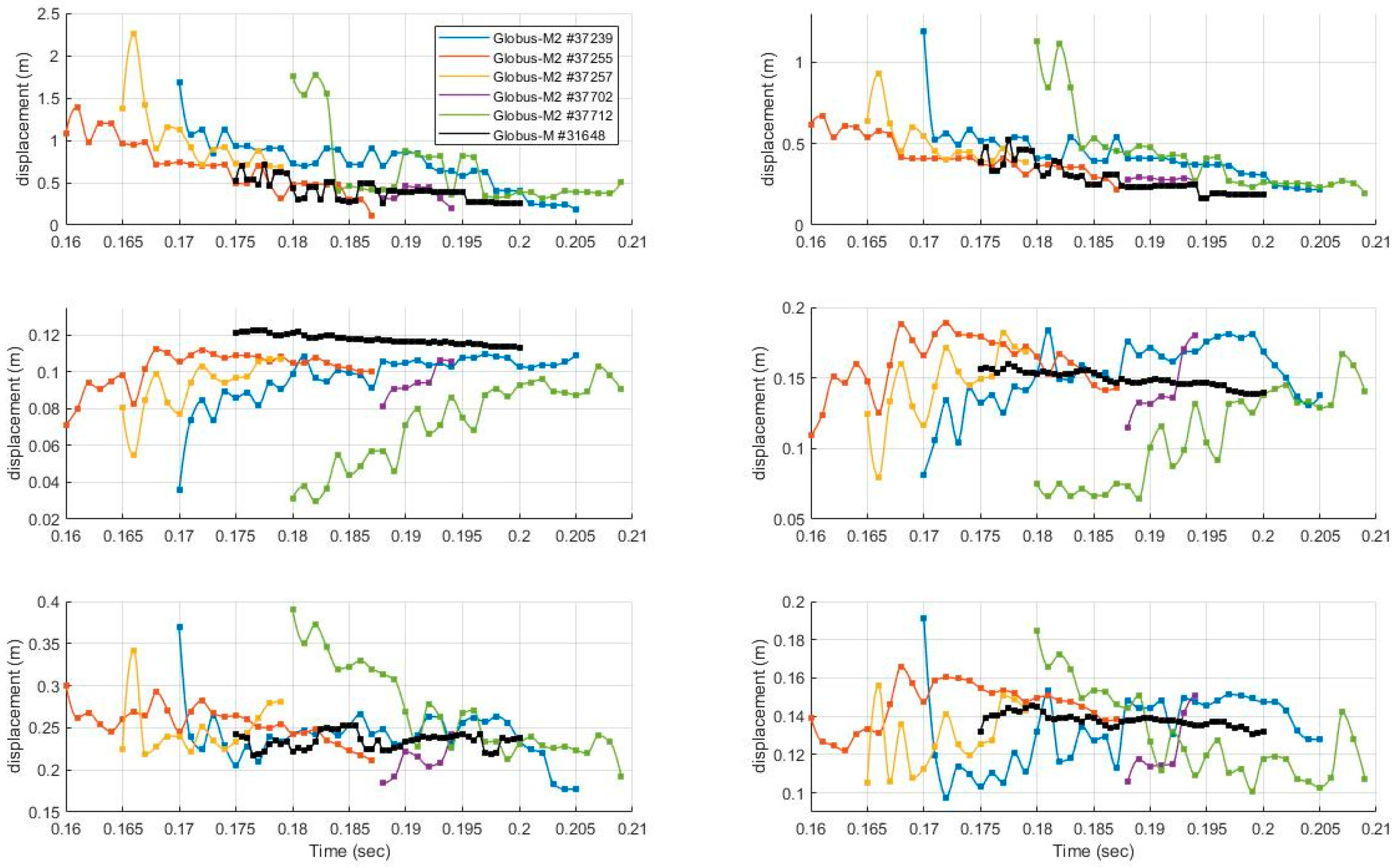
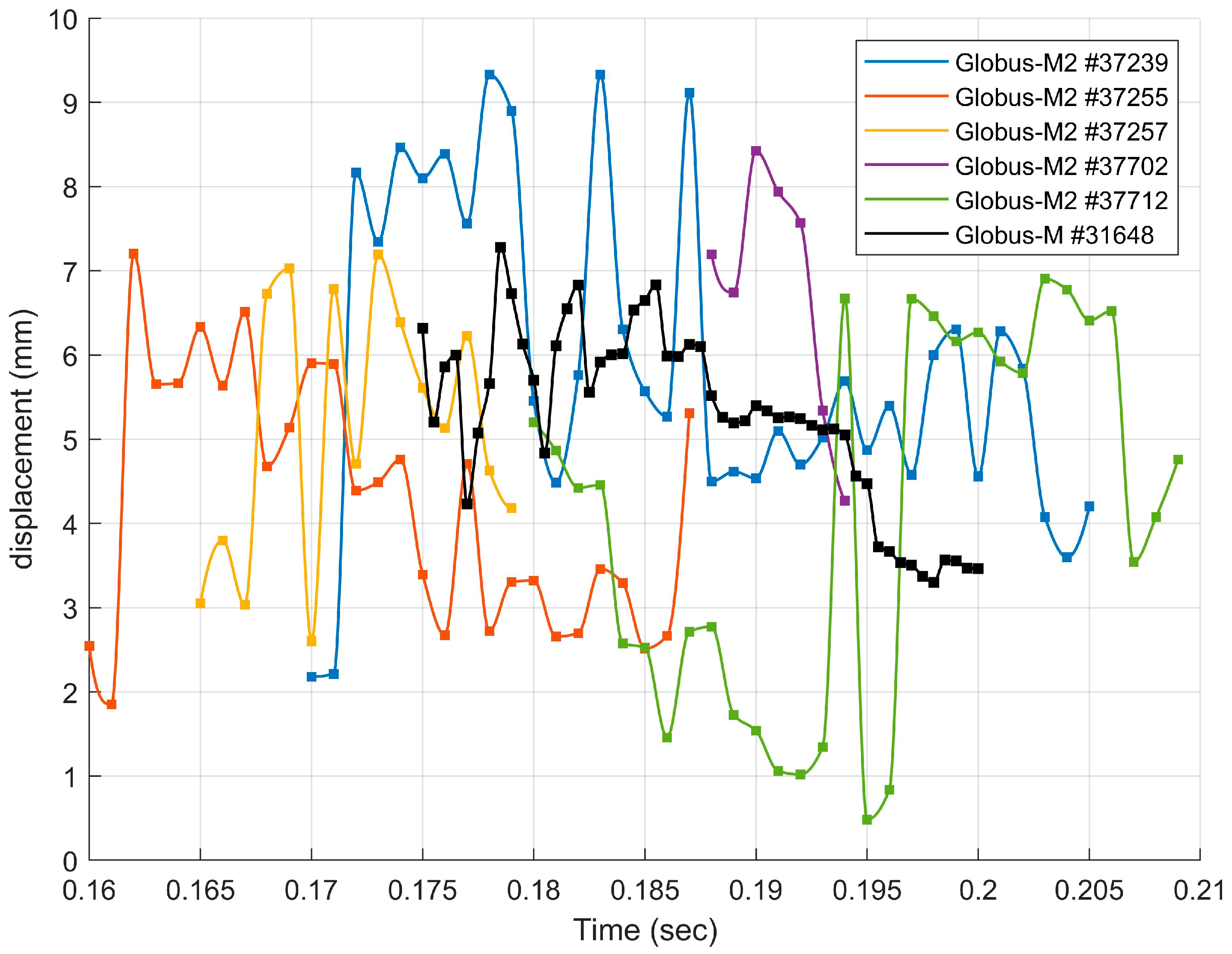
5. Estimation of the Reachability Area of the Plasma Shape
5.1. Definitions of Plasma Shape Estimations
5.2. New Methodology and Upper Estimation of the Reachability Area of the Plasma Shape
5.3. Methodology and Lower Estimation of the Reachability Area of the Plasma Shape
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wesson, J. Tokamaks, 3rd ed.; Clarendon Press: Oxford, UK, 2004. [Google Scholar]
- Mitrishkin, Y.; Korenev, P.; Prokhorov, A.; Kartsev, N.; Patrov, M. Plasma Control in Tokamaks. Part 1. Controlled thermonuclear fusion problem. Tokamaks. Components of control systems. Adv. Syst. Sci. Appl. 2018, 18, 26–52. [Google Scholar]
- Mitrishkin, Y.V.; Kartsev, N.M.; Pavlova, E.A.; Prohorov, A.A.; Korenev, P.S.; Patrov, M.I. Plasma Control in Tokamaks. Part. 2. Magnetic Plasma Control Systems. Adv. Syst. Sci. Appl. 2018, 18, 39–78. [Google Scholar]
- Mitrishkin, Y.; Kartsev, N.; Konkov, A.; Patrov, M. Plasma Control in Tokamaks. Part 3.1. Plasma magnetic control systems in ITER and DEMO. Adv. Syst. Sci. Appl. 2020, 2, 82–97. [Google Scholar]
- Mitrishkin, Y.; Kartsev, N.; Konkov, A.; Patrov, M. Plasma Control in Tokamaks. Part 3.2. Simulation and realization of plasma control systems in ITER and constructions of DEMO. Adv. Syst. Sci. Appl. 2020, 20, 136–152. [Google Scholar]
- Gryaznevich, M.P.; A Chuyanov, V.; Kingham, D.; Sykes, A.; Tokamak Energy Ltd. Advancing fusion by innovations: Smaller, quicker, cheaper. J. Phys. Conf. Ser. 2015, 591, 012005. [Google Scholar] [CrossRef] [Green Version]
- Chuyanov, V.A.; Gryaznevich, M.P. Modular fusion power plant. Fusion Eng. Des. 2017, 122, 238–252. [Google Scholar] [CrossRef]
- Lawson, J.D. Some Criteria for a Power Producing Thermonuclear Reactor. Proc. Phys. Soc. Sect. 1957, 70, 6–10. [Google Scholar] [CrossRef]
- Gusev, V.; Azizov, E.; Alekseev, A.; Arneman, A.; Bakharev, N.; Belyakov, V.; Bender, S.; Bondarchuk, E.; Bulanin, V.; Bykov, A.; et al. Globus-M results as the basis for a compact spherical tokamak with enhanced parameters Globus-M2. Nucl. Fusion 2013, 53, 093013. [Google Scholar] [CrossRef]
- Minaev, V.; Gusev, V.; Sakharov, N.; Varfolomeev, V.; Bakharev, N.; Belyakov, V.; Bondarchuk, E.; Brunkov, P.; Chernyshev, F.; Davydenko, V.; et al. Spherical tokamak Globus-M2: Design, integration, construction. Nucl. Fusion 2017, 57, 066047. [Google Scholar] [CrossRef]
- Humphreys, D.; Casper, T.; Eidietis, N.; Ferrara, M.; Gates, D.; Hutchinson, I.; Jackson, G.; Kolemen, E.; Leuer, J.; Lister, J.; et al. Experimental vertical stability studies for ITER performance and design guidance. Nucl. Fusion 2009, 49, 115003. [Google Scholar] [CrossRef] [Green Version]
- Mitrishkin, Y.V.; Kartsev, N.V.; Zenkov, S.M. Stabilization of unstable vertical position of plasma in T-15 tokamak. Autom. Remote Control 2014, 75 Pt 1, 281–293. [Google Scholar] [CrossRef]
- Mitrishkin, Y.V.; Korenev, P.S.; Konkov, A.E.; Kartsev, N.M.; Smirnov, I.S. New horizontal and vertical field coils with optimised location for robust decentralized plasma position control in the IGNITOR tokamak. Fusion Eng. Des. 2022, 174, 112993. [Google Scholar] [CrossRef]
- Mitrishkin, Y.V.; Prokhorov, A.A.; Korenev, P.S.; Patrov, M.I. Hierarchical robust switching control method with the equilibrium reconstruction code based on Improved Moving Filaments approach in the feedback for tokamak plasma shape. Fusion Eng. Des. 2019, 138, 138–150. [Google Scholar] [CrossRef]
- Kuznetsov, E.A.; Mitrishkin, Y.V.; Kartsev, N.M. Current Inverter as Auto-Oscillation Actuator in Applications for Plasma Position Control Systems in the Globus-M/M2 and T-11M Tokamaks. Fusion Eng. Des. 2019, 143, 247–258. [Google Scholar] [CrossRef]
- Korenev, P.S.; Mitrishkin, Y.V.; Patrov, M.I. Reconstruction of equilibrium distribution of tokamak plasma parameters by external magnetic measurements and construction of linear plasma models. Mechatron. Autom. Control 2016, 17, 254–265. (In Russian) [Google Scholar] [CrossRef]
- Qiu, Q.; Guo, Y.; Gao, L.; Huang, J.; Sun, H.; Lin, X.; Li, J.; Xiao, B.; Liu, L.; Luo, Z.; et al. The numerical analysis of controllability of EAST plasma vertical position by TSC. Fusion Eng. Des. 2019, 141, 116–120. [Google Scholar] [CrossRef]
- Ou, Y.; Schuster, E. Controllability analysis for current profile control in tokamaks. In Proceedings of the 48h IEEE Conference on Decision and Control (CDC) held jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 315–320. [Google Scholar]
- Maviglia, F.; Artaserse, G.; Albanese, R.; Calabrò, G.; Crisanti, F.; Pironti, A.; Pizzuto, A.; Ramogida, G. Poloidal field circuits sensitivity studies and shape control in FAST. Fusion Eng. Des. 2011, 86, 1076–1079. [Google Scholar] [CrossRef]
- Garcia-Sanz, M. Robust Control Engineering. Practical QFT Solutions; Taylor & Francis Group, CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Dorf, R.C.; Bishop, R.H. Modern Control Systems. Solution Manual, 11th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2008. [Google Scholar]
- Mitrishkin, Y.V.; Kruzhkov, V.I.; Patrov, M.I. Estimation of controllability region of unstable vertical plasma position and plasma separatrix multivariable reachability area of a spherical tokamak. In Proceedings of the 46th EPS Conference on Plasma Physics, Milan, Italy, 8–12 July 2019. [Google Scholar]
- Kahaner, D.; Moler, D.; Nash, S. Numerical Methods and Software; Prentice Hall: Upper Saddle River, NJ, USA, 1988. [Google Scholar]
- Garcia-Sanz, M. The QFT Control Toolbox for Matlab—QFTCT. 2018. Available online: http://codypower.com (accessed on 13 October 2022).
- Dantzig, G.B.; Orden, A.; Wolfe, P. Generalized Simplex Method for Minimizing a Linear Form Under Linear Inequality Restraints. Pac. J. Math 1955, 5, 183–195. [Google Scholar] [CrossRef]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mitrishkin, Y.V.; Kruzhkov, V.I.; Korenev, P.S. Methodology of Plasma Shape Reachability Area Estimation in D-Shaped Tokamaks. Mathematics 2022, 10, 4605. https://doi.org/10.3390/math10234605
Mitrishkin YV, Kruzhkov VI, Korenev PS. Methodology of Plasma Shape Reachability Area Estimation in D-Shaped Tokamaks. Mathematics. 2022; 10(23):4605. https://doi.org/10.3390/math10234605
Chicago/Turabian StyleMitrishkin, Yuri V., Valerii I. Kruzhkov, and Pavel S. Korenev. 2022. "Methodology of Plasma Shape Reachability Area Estimation in D-Shaped Tokamaks" Mathematics 10, no. 23: 4605. https://doi.org/10.3390/math10234605
APA StyleMitrishkin, Y. V., Kruzhkov, V. I., & Korenev, P. S. (2022). Methodology of Plasma Shape Reachability Area Estimation in D-Shaped Tokamaks. Mathematics, 10(23), 4605. https://doi.org/10.3390/math10234605