
Research on Multi-Objective Multi-Robot Task Allocation by Lin–Kernighan–Helsgaun Guided Evolutionary Algorithms

Abstract
:1. Introduction
- Single-task robots (ST) or multi-task robots (MT), according to single robot’s capability of how many tasks it can execute at a time.
- Single-robot tasks (SR) or multi-robot tasks (MR), according to the task’s requirement of number of robots to fulfill it.
- Instantaneous assignment (IA) or time-extend assignment (TA), depending on the timeliness of the solution. IA means the solution is instantaneous but may be short-sighted, while TA uses more information of the situation and thus can achieve a plan of global sense.
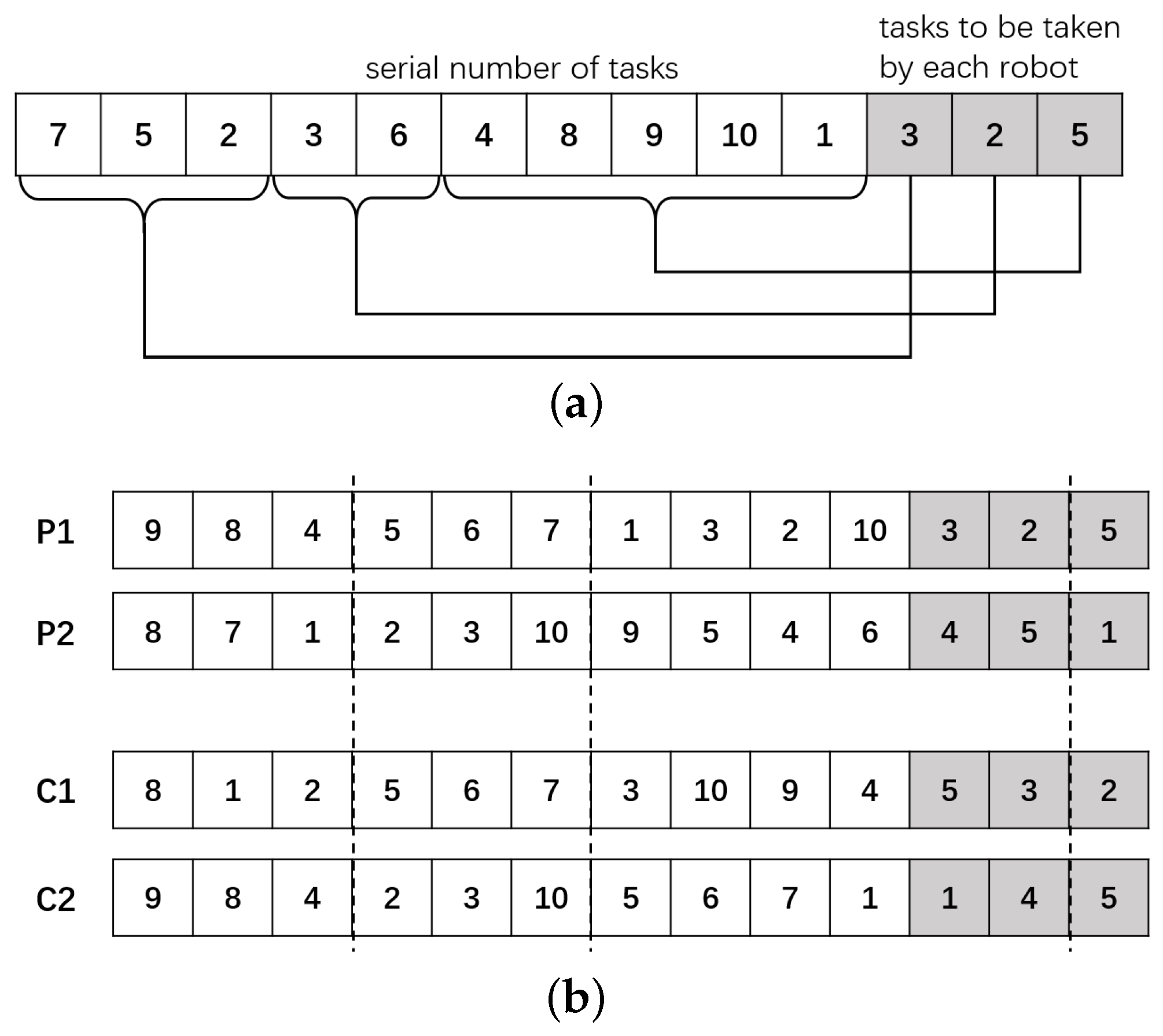
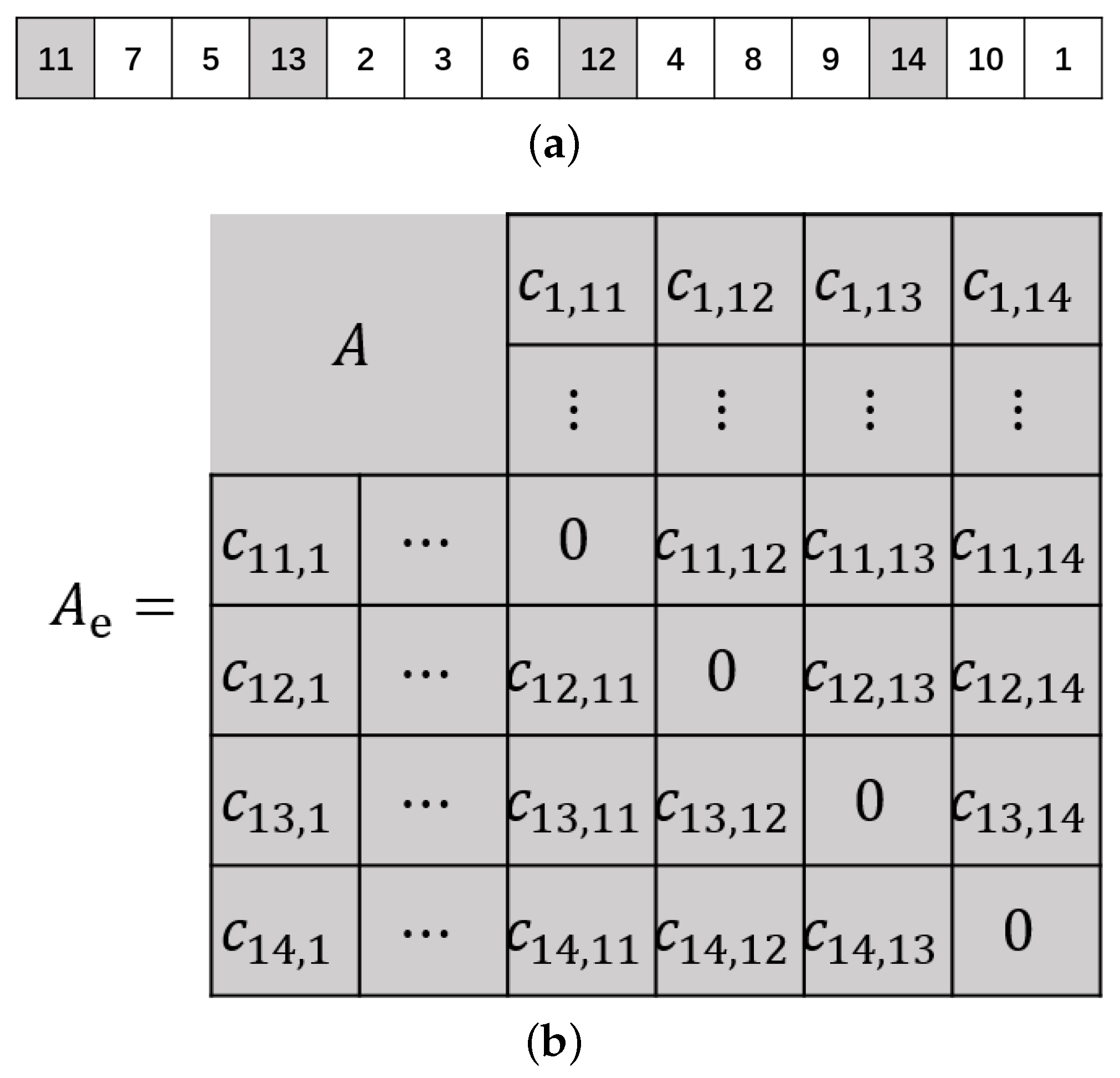
- To code a feasible solution concisely, a novel one-chromosome representation technique is proposed. Compared to its traditional counterparts such as two-part chromosome, it first deems the depots of robots as virtual tasks in MRTA, thus making genetic operations easier and ensuring the diversity of the population.
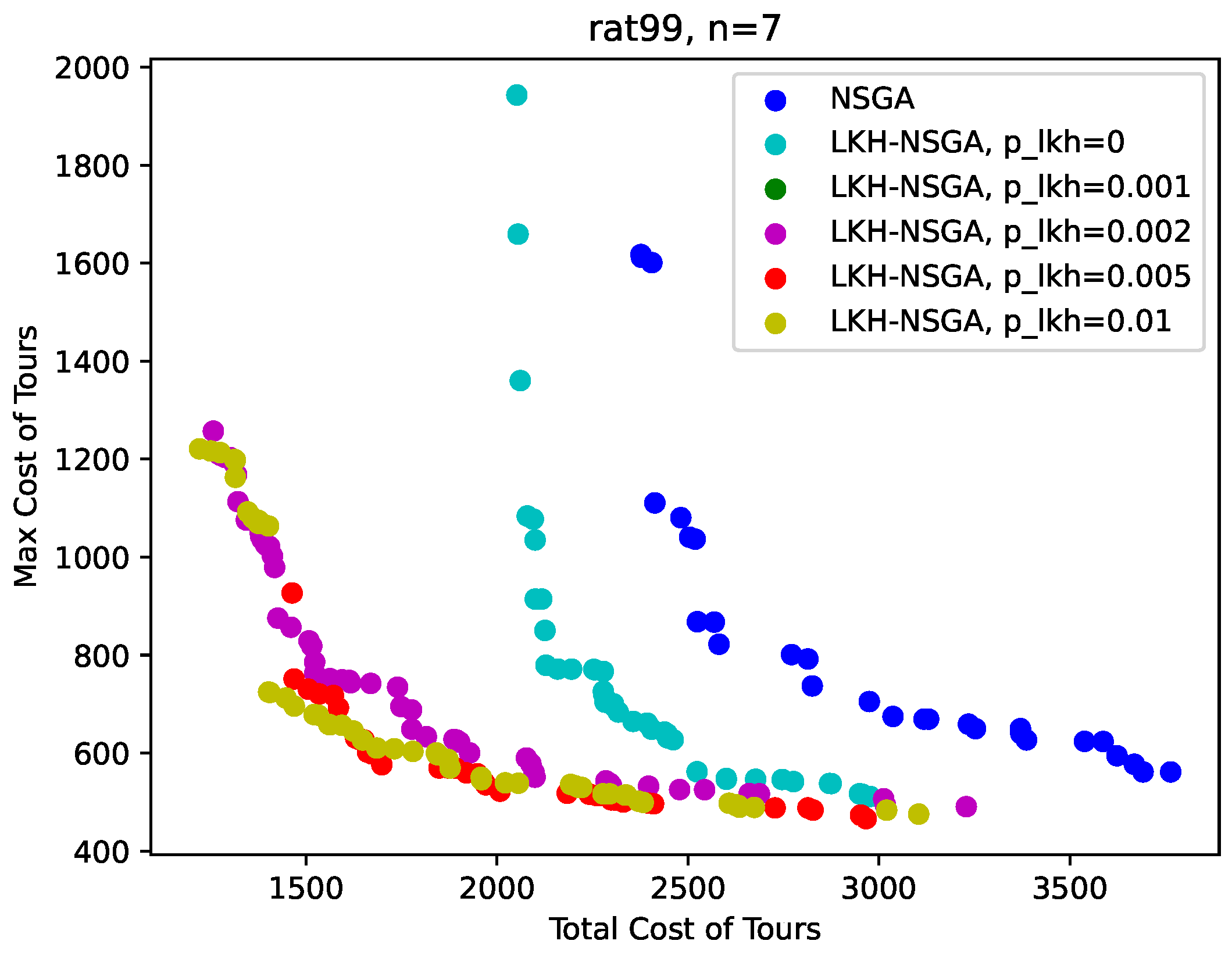
- The Lin–Kernighan–Helsgaun (LKH) guidance mechanism, as an efficient local planner, is introduced into the multi-objective evolutionary algorithms (MOEA) in order to generate prophet generation as well as guide the evolutionary direction during the evolutionary process, which is proven effective to improve the solution quality of the Pareto set. Moreover, the guidance mechanism is specifically designed to take effect in a probabilistic sense so that it would not lead to additional computational burden.
- The guidance rate as the main parameter of the LKH guidance mechanism has been studied, and the proper value is given.
- Numerical experiments show the algorithm is helpful in providing near optimal solutions for practical decision making in MRTA with constraints fulfilled.
2. Related Work
3. Problem Formulation
4. Methodology
4.1. Solution Coding
4.2. Genetic Operations
4.3. LKH Guidance
| Algorithm 1: LKH-guided NSGA for MRTA problem |
 |
5. Numerical Experiments
5.1. Parameters Setup
5.2. Evaluation Metrics
5.3. Result and Discussion
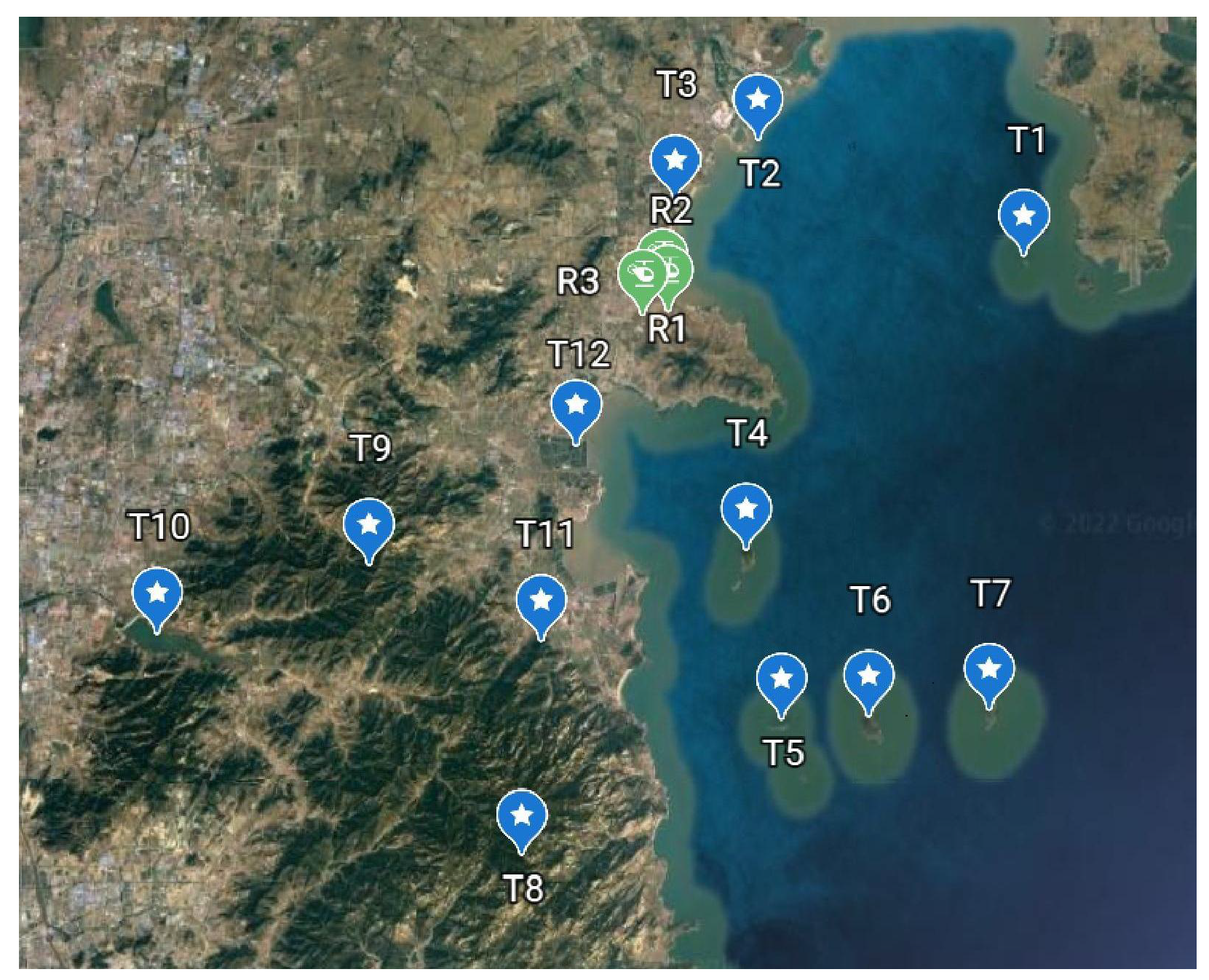
6. A General Case Study
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Feroz, A.K.; Zo, H.; Chiravuri, A. Digital transformation and environmental sustainability: A review and research agenda. Sustainability 2021, 13, 1530. [Google Scholar] [CrossRef]
- Hanelt, A.; Bohnsack, R.; Marz, D.; Antunes Marante, C. A systematic review of the literature on digital transformation: Insights and implications for strategy and organizational change. J. Manag. Stud. 2021, 58, 1159–1197. [Google Scholar] [CrossRef]
- Delaram, J.; Houshamand, M.; Ashtiani, F.; Valilai, O.F. A utility-based matching mechanism for stable and optimal resource allocation in cloud manufacturing platforms using deferred acceptance algorithm. J. Manuf. Syst. 2021, 60, 569–584. [Google Scholar] [CrossRef]
- Delaram, J.; Houshamand, M.; Ashtiani, F.; Fatahi Valilai, O. Development of public cloud manufacturing markets: A mechanism design approach. Int. J. Syst. Sci. Oper. Logist. 2022, 1–27. [Google Scholar] [CrossRef]
- Dorigo, M.; Theraulaz, G.; Trianni, V. Reflections on the future of swarm robotics. Sci. Robot. 2020, 5, eabe4385. [Google Scholar] [CrossRef]
- Verma, J.K.; Ranga, V. Multi-robot coordination analysis, taxonomy, challenges and future scope. J. Intell. Robot. Syst. 2021, 102, 10. [Google Scholar] [CrossRef]
- Cheng, Y.; Sun, F.; Zhang, Y.; Tao, F. Task allocation in manufacturing: A review. J. Ind. Inf. Integr. 2019, 15, 207–218. [Google Scholar] [CrossRef]
- Brambilla, M.; Ferrante, E.; Birattari, M.; Dorigo, M. Swarm robotics: A review from the swarm engineering perspective. Swarm Intell. 2013, 7, 1–41. [Google Scholar] [CrossRef] [Green Version]
- Farinelli, A.; Boscolo, N.; Zanotto, E.; Pagello, E. Advanced approaches for multi-robot coordination in logistic scenarios. Robot. Auton. Syst. 2017, 90, 34–44. [Google Scholar] [CrossRef]
- Zheng, H.; Yuan, J. An Integrated Mission Planning Framework for Sensor Allocation and Path Planning of Heterogeneous Multi-UAV Systems. Sensors 2021, 21, 3557. [Google Scholar] [CrossRef]
- Zaidi, L.; Sahnoun, M.; Bettayeb, B. Task allocation based on shared resource constraint for multi-robot systems in manufacturing industry. IFAC-PapersOnLine 2019, 52, 2020–2025. [Google Scholar] [CrossRef]
- Wei, Z.; Xia, C.; Yuan, X.; Sun, R.; Lyu, Z.; Shi, L.; Ji, J. The path planning scheme for joint charging and data collection in WRSNs: A multi-objective optimization method. J. Netw. Comput. Appl. 2020, 156, 102565. [Google Scholar] [CrossRef]
- Khamis, A.; Hussein, A.; Elmogy, A. Multi-robot task allocation: A review of the state-of-the-art. In Cooperative Robots and Sensor Networks; Springer: Berlin/Heidelberg, Germany, 2015; pp. 31–51. [Google Scholar]
- Gerkey, B.P.; Matarić, M.J. A formal analysis and taxonomy of task allocation in multi-robot systems. Int. J. Robot. Res. 2004, 23, 939–954. [Google Scholar] [CrossRef] [Green Version]
- Koubâa, A.; Bennaceur, H.; Chaari, I.; Trigui, S.; Ammar, A.; Sriti, M.F.; Alajlan, M.; Cheikhrouhou, O.; Javed, Y. Robot Path Planning and Cooperation: Foundations, Algorithms and Experimentations; Springer: Berlin/Heidelberg, Germany, 2018; Volume 772. [Google Scholar]
- Tkach, I.; Edan, Y. Distributed Heterogeneous Multi Sensor Task Allocation Systems; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Dias, M.B.; Zlot, R.; Kalra, N.; Stentz, A. Market-based multirobot coordination: A survey and analysis. Proc. IEEE 2006, 94, 1257–1270. [Google Scholar] [CrossRef] [Green Version]
- Kivelevitch, E.; Cohen, K.; Kumar, M. A market-based solution to the multiple traveling salesmen problem. J. Intell. Robot. Syst. 2013, 72, 21–40. [Google Scholar] [CrossRef]
- Wei, C.; Ji, Z.; Cai, B. Particle swarm optimization for cooperative multi-robot task allocation: A multi-objective approach. IEEE Robot. Autom. Lett. 2020, 5, 2530–2537. [Google Scholar] [CrossRef]
- Jose, K.; Pratihar, D.K. Task allocation and collision-free path planning of centralized multi-robots system for industrial plant inspection using heuristic methods. Robot. Auton. Syst. 2016, 80, 34–42. [Google Scholar] [CrossRef]
- Liu, H.; Li, X.; Wu, G.; Fan, M.; Wang, R.; Gao, L.; Pedrycz, W. An iterative two-phase optimization method based on divide and conquer framework for integrated scheduling of multiple UAVs. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5926–5938. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, H. MOEA/D: A Multiobjective Evolutionary Algorithm Based on Decomposition. IEEE Trans. Evol. Comput. 2007, 11, 712–731. [Google Scholar] [CrossRef]
- Cheikhrouhou, O.; Khoufi, I. A comprehensive survey on the Multiple Traveling Salesman Problem: Applications, approaches and taxonomy. Comput. Sci. Rev. 2021, 40, 100369. [Google Scholar] [CrossRef]
- Carter, A.E.; Ragsdale, C.T. A new approach to solving the multiple traveling salesperson problem using genetic algorithms. Eur. J. Oper. Res. 2006, 175, 246–257. [Google Scholar] [CrossRef]
- Yuan, S.; Skinner, B.; Huang, S.; Liu, D. A new crossover approach for solving the multiple travelling salesmen problem using genetic algorithms. Eur. J. Oper. Res. 2013, 228, 72–82. [Google Scholar] [CrossRef]
- Király, A.; Abonyi, J. Optimization of multiple traveling salesmen problem by a novel representation based genetic algorithm. In Intelligent Computational Optimization in Engineering; Springer: Berlin/Heidelberg, Germany, 2011; pp. 241–269. [Google Scholar]
- Lupoaie, V.I.; Chili, I.A.; Breaban, M.E.; Raschip, M. SOM-guided evolutionary search for solving minmax multiple-TSP. In Proceedings of the 2019 IEEE Congress on Evolutionary Computation (CEC), Wellington, New Zealand, 10–13 June 2019; pp. 73–80. [Google Scholar]
- Zhou, B.; Zhou, R.; Gan, Y.; Fang, F.; Mao, Y. Multi-Robot Multi-Station Cooperative Spot Welding Task Allocation Based on Stepwise Optimization: An Industrial Case Study. Robot. Comput.-Integr. Manuf. 2022, 73, 102197. [Google Scholar] [CrossRef]
- Mahmud, M.S.A.; Abidin, M.S.Z.; Buyamin, S.; Emmanuel, A.A.; Hasan, H.S. Multi-objective route planning for underwater cleaning robot in water reservoir tank. J. Intell. Robot. Syst. 2021, 101, 9. [Google Scholar] [CrossRef]
- Coello, C.C. Evolutionary multi-objective optimization: A historical view of the field. IEEE Comput. Intell. Mag. 2006, 1, 28–36. [Google Scholar] [CrossRef]
- Przybylski, A.; Gandibleux, X. Multi-objective branch and bound. Eur. J. Oper. Res. 2017, 260, 856–872. [Google Scholar] [CrossRef]
- Benson, H. Further analysis of an outcome set-based algorithm for multiple-objective linear programming. J. Optim. Theory Appl. 1998, 97, 1–10. [Google Scholar] [CrossRef]
- Zitzler, E.; Laumanns, M.; Thiele, L. SPEA2: Improving the Strength Pareto Evolutionary Algorithm; TIK-Report 103; ETH Zurich: Zurich, Switzerland, 2001. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Jain, H.; Deb, K. An evolutionary many-objective optimization algorithm using reference-point based nondominated sorting approach, part II: Handling constraints and extending to an adaptive approach. IEEE Trans. Evol. Comput. 2013, 18, 602–622. [Google Scholar] [CrossRef]
- Beume, N.; Naujoks, B.; Emmerich, M. SMS-EMOA: Multiobjective selection based on dominated hypervolume. Eur. J. Oper. Res. 2007, 181, 1653–1669. [Google Scholar] [CrossRef]
- Erfani, T.; Utyuzhnikov, S.V.; Kolo, B. A modified directed search domain algorithm for multiobjective engineering and design optimization. Struct. Multidiscip. Optim. 2013, 48, 1129–1141. [Google Scholar] [CrossRef]
- Bektas, T. The multiple traveling salesman problem: An overview of formulations and solution procedures. Omega 2006, 34, 209–219. [Google Scholar] [CrossRef]
- Necula, R.; Breaban, M.; Raschip, M. Tackling the bi-criteria facet of multiple traveling salesman problem with ant colony systems. In Proceedings of the 2015 IEEE 27th International Conference on Tools with Artificial Intelligence (ICTAI), Vietri sul Mare, Italy, 9–11 November 2015; pp. 873–880. [Google Scholar]
- Lu, L.C.; Yue, T.W. Mission-oriented ant-team ACO for min–max MTSP. Appl. Soft Comput. 2019, 76, 436–444. [Google Scholar] [CrossRef]
- Al-Omeer, M.A.; Ahmed, Z.H. Comparative study of crossover operators for the MTSP. In Proceedings of the 2019 International Conference on Computer and Information Sciences (ICCIS), Sakaka, Saudi Arabia, 3–4 April 2019; pp. 1–6. [Google Scholar]
- Helsgaun, K. An effective implementation of the Lin–Kernighan traveling salesman heuristic. Eur. J. Oper. Res. 2000, 126, 106–130. [Google Scholar] [CrossRef] [Green Version]
- Li, M.; Yao, X. Quality evaluation of solution sets in multiobjective optimisation: A survey. ACM Comput. Surv. CSUR 2019, 52, 26. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instances | Indictors | g-MinMaxACS | MOEA/D | NSGA | LKH-MOEA/D | LKH-NSGA | Rel. Impr. LKH-NSGA |
|---|---|---|---|---|---|---|---|
| 1 | 1 | 1 | 0.786 | 0 | 100% | ||
| 0.318 | 0.278 | 0.373 | 0.385 | 0.411 | 6.8% | ||
| 14.542 | 59.640 | 14.504 | 22.945 | 3.792 | 73.9% | ||
| 1 | 1 | 1 | 0.938 | 0.113 | 88.0% | ||
| 0.274 | 0.296 | 0.381 | 0.381 | 0.420 | 10.2% | ||
| 9.389 | 28.385 | 5.047 | 49.992 | 2.784 | 44.8% | ||
| 1 | 1 | 1 | 0.812 | 0.011 | 98.6% | ||
| 0.272 | 0.214 | 0.306 | 0.303 | 0.342 | 11.8% | ||
| 118.189 | 1500.125 | 467.152 | 457.896 | 69.930 | 40.8% | ||
| 0.962 | 1 | 0.670 | 0.862 | 0.220 | 67.2% | ||
| 0.328 | 0.332 | 0.407 | 0.401 | 0.445 | 9.3% | ||
| 189.513 | 1105.016 | 72.243 | 378.840 | 266.841 | - | ||
| 1 | 1 | 1 | 0.600 | 0.595 | 0.8% | ||
| 0.359 | 0.217 | 0.325 | 0.399 | 0.431 | 8.0% | ||
| 13.082 | 107.803 | 42.998 | 17.816 | 5.109 | 60.9% | ||
| 1 | 1 | 1 | 0.615 | 0.232 | 62.3% | ||
| 0.315 | 0.196 | 0.327 | 0.402 | 0.437 | 8.7% | ||
| 9.431 | 71.677 | 8.670 | 70.807 | 6.016 | 30.6% | ||
| 1 | 1 | 1 | 0.647 | 0.222 | 65.7% | ||
| 0.399 | 0.223 | 0.367 | 0.503 | 0.526 | 4.6% | ||
| 35.503 | 200.523 | 209.447 | 66.495 | 15.510 | 56.3% | ||
| 0.8 | 1 | 1 | 0.923 | 0.141 | 82.4% | ||
| 0.326 | 0.292 | 0.359 | 0.501 | 0.527 | 5.2% | ||
| 52.892 | 220.603 | 26.184 | 101.713 | 15.960 | 39.0% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Ma, S.; Jiang, X. Research on Multi-Objective Multi-Robot Task Allocation by Lin–Kernighan–Helsgaun Guided Evolutionary Algorithms. Mathematics 2022, 10, 4714. https://doi.org/10.3390/math10244714
Zhang Z, Ma S, Jiang X. Research on Multi-Objective Multi-Robot Task Allocation by Lin–Kernighan–Helsgaun Guided Evolutionary Algorithms. Mathematics. 2022; 10(24):4714. https://doi.org/10.3390/math10244714
Chicago/Turabian StyleZhang, Zhenqiang, Sile Ma, and Xiangyuan Jiang. 2022. "Research on Multi-Objective Multi-Robot Task Allocation by Lin–Kernighan–Helsgaun Guided Evolutionary Algorithms" Mathematics 10, no. 24: 4714. https://doi.org/10.3390/math10244714
APA StyleZhang, Z., Ma, S., & Jiang, X. (2022). Research on Multi-Objective Multi-Robot Task Allocation by Lin–Kernighan–Helsgaun Guided Evolutionary Algorithms. Mathematics, 10(24), 4714. https://doi.org/10.3390/math10244714