1. Introduction
Permanent Magnet Synchronous Motors (PMSMs) are prominent nowadays in a variety of fields, such as mobility, industry, and home appliances mostly replacing DC and induction motors [
1,
2]. The main benefits compared to other drives are their high efficiency, lightweight structure, high power density, lower required maintenance, as well as a high and steady torque output [
3,
4,
5]. Nevertheless, these machines require the rotor position information for proper driving [
6], thus requiring the usage of an encoder that increases space requirements and costs. For this reason, several techniques have been proposed in the literature to overcome this limitation [
7,
8,
9,
10] that are mainly based on the exploitation of machine anisotropies or induced Back-Electro Motive Force (BEMF). Depending on the expected performance of the machine, the structure of PMSMs can vary. These variations can be classified according to the position of the permanent magnets on the rotor structure. If magnets are mounted on the surface of a cylindrical rotor, the machine is referred to as surface-mounted PMSM (SPMSM); otherwise, if magnets are buried in the rotor structure, the machine is referred to as an Interior PMSM (IPMSM).
Despite the robustness of PMSMs, machine failures can occur that can lead to the end of production or even life-endangering situations, such as motor failures occurring in transport and aerospace applications [
11]. These events cannot only determine undesired situations, but also generate labor effort and high costs, both being direct and indirect. For this reason, failure prevention and condition monitoring techniques are of key importance in a majority of applications.
A straightforward way to prevent failure is inspecting all PMSMs on a regular basis. This, however, is not always possible, and in rare cases, profitable. Moreover, failures can still occur in between inspections. Instead, condition monitoring techniques are used to detect faults in a machine during operation. A survey about these techniques for rotating electrical machines can be found in the Ref. [
12]. They can be classified in mechanical, chemical and electrical methods, although a number of novel methods, like the ones presented in the Ref. [
13], use multi-parameter monitoring combined with a data-driven approach. Electrical fault detection methods are especially interesting for PMSMs, as some of them are based on quantities that are already measured to control the machine. This avoids the need for additional sensors, which are necessary for mechanical and chemical condition monitoring methods. Depending on the method, the typical measured electrical quantities include power, stator currents and voltages.
Machine faults can be categorized into mechanical, electrical and magnetic ones [
14]. Mechanical faults are caused by material corrosion or fatigue, poor lubrication and an unbalanced rotor. These factors lead to eccentricity and, in the worst-case scenario, to a failure of the bearing. Electrical faults, such as a short circuit in the stator windings, are caused by overloading the machine, high temperature, and high stress. Magnetic faults include partial or anisotropic magnetization and, even worse, complete demagnetization. Causes for this are high temperature, mechanical stress and aging processes. It is fairly common that one of these faults quickly prompts additional faults even of another category (fault avalanche).
In particular, the works presented in the Refs. [
15,
16] trace the majority of failures occurring in induction machines back to mechanical issues. This data cannot simply be transferred to PMSMs, although it is safe to assume that PMSMs are also strongly affected by mechanical faults. Extensive reliability surveys for PMSMs are not yet available, as their mass application is fairly recent. As mentioned before, the main mechanical faults are eccentricity and bearing failures. With eccentricity being a big contributor to the failure of a bearing and a less obvious mechanical fault, it is a crucial parameter to monitor. This can be accomplished by means of mechanical sensors. Nevertheless, this approach would increase the size, cost and complexity of the overall system. Thus, another approach is the monitoring of the machine phase inductances. Indeed, the latter ones have a relatively strong dependency on eccentricity and, for this reason, any method based on their measurement and observation can be exploited for eccentricity detection.
The influence of eccentricity on the machine phase inductances can typically be observed by direct measurement on a test machine or by means of numerical methods and Finite Element Analysis. In any case, in order to fully analyze this dependency, it is very important to elaborate a mathematical model. This can be more easily numerically evaluated and provides, at the same time, a deeper insight into the dependency inductance, or eccentricity. One of the most frequently used starting points for numerical and analytical inductance models is the Modified Winding Function Approach (MWFA). Its general form is
where
x and
y are arbitrary phases belonging to the set
of the three-phase machine,
is the permeability of the air-gap,
r is the radius of the average air-gap, and
l is the stack length of the machine. If
, Equation (
1) describes a self-inductance, otherwise a mutual-inductance. The functions of Equation (
1) are the modified winding function
, the turns function
and the inverse air-gap function
, where
is the rotor position and
is an arbitrary angle in the stator reference frame.
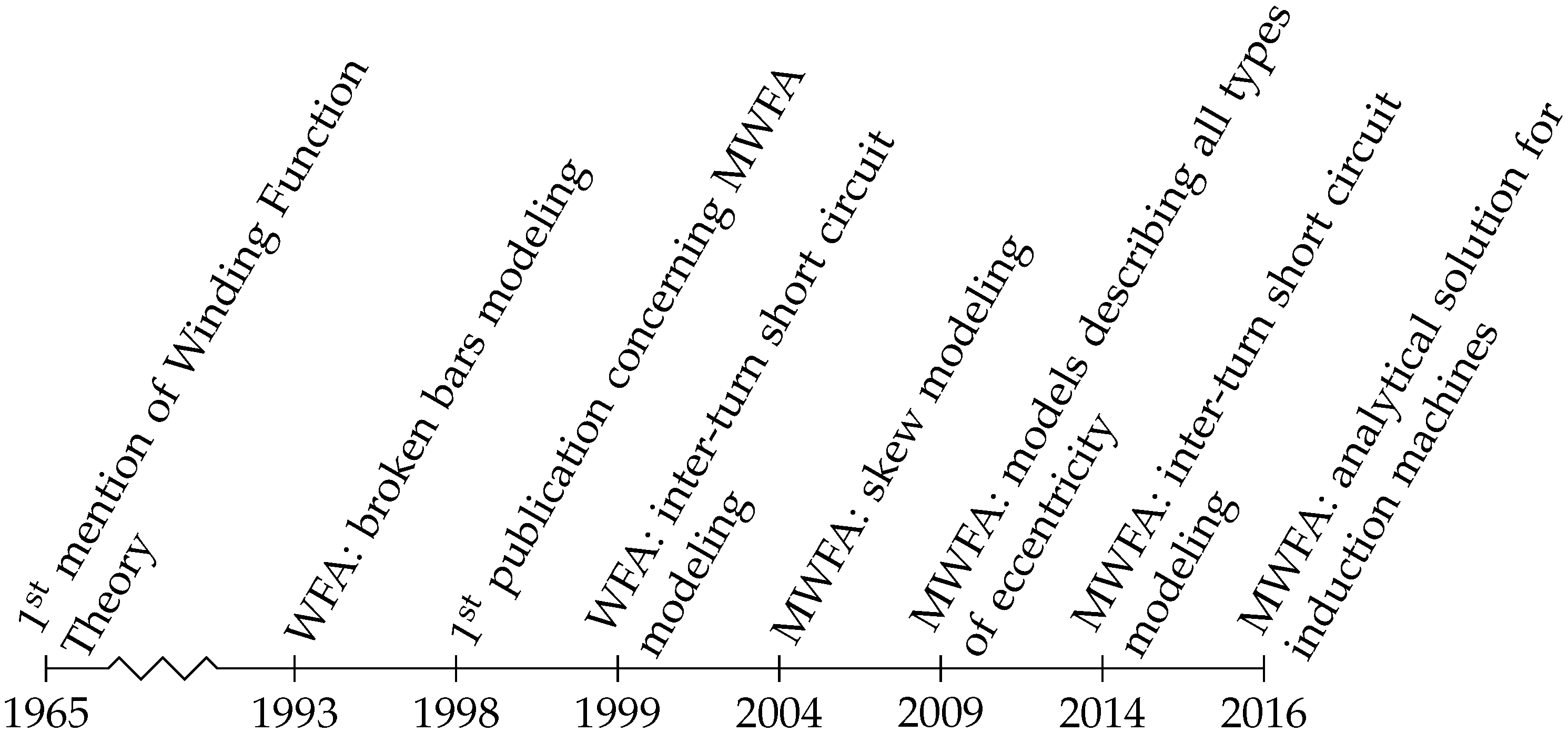
The Winding Function Approach (WFA) has been used extensively since at least 1965 [
17] and has undergone major modifications and extensions over the last couple of decades, as illustrated in
Figure 1. Using it, it is possible to model electrical machines based directly on the geometry and the physical layout of the winding. Although this approach is limited to a symmetrical air-gap, it is still applied to model healthy machines, as well as induction machines with broken bars and end rings [
18] or inter-turn short circuits [
19]. In order to extend this model to include machines with a non-symmetric air-gap, the MWFA was introduced in the Ref. [
20]. Already in this first work, the MWFA was used to model dynamic eccentricity in a synchronous machine. Since then, it has been adopted to describe electrical machines in all kinds of conditions, such as skew [
21], inter-turn short circuits [
22] and, due to its modification, eccentricity [
23]. In fact, models describing all types of eccentricity at once have been derived [
24]. Most of these extensions to the MWFA, unfortunately, are based on inserting the specific functions into the general Equation (
1) and performing a numerical integration. This is sufficient for most applications. However, an analytical solution would provide a meaningful insight into the dependency between eccentricity and machine phase inductances, making the MWFA more suitable for the synthesis of model-based fault detection techniques. There are several analytical inductance models which have been derived from the MWFA, but these are either restricted to a small number of harmonics or use a complex representation of the turns and air-gap functions [
25]. Additionally, most models describe induction machines instead of PMSMs.
Simplifications while using the MWFA usually include a cylindrical stator shape and, therefore, the exclusion of slot openings, the permeability of the stator and rotor cores to be infinite compared to the air-gap material, and the use of linear materials. The last simplification is generally true in low-current or fully saturated conditions. Although there are a number of severe simplifications, reviews such as the Ref. [
26] have found the MWFA to fit well to most electrical machines, although this work points out its limitations, including machines with large air-gaps.
This work derives and presents an exact solution to the MWFA equation for PMSMs that highlights the harmonic content of the machine phase inductances in dependence of machine eccentricity. After introducing the MWFA formula and the mathematical expressions of each term, the exact solution is derived. Afterwards, validation is conducted by means of numerical simulations.
2. Eccentricity
Electrical machines are typically affected by eccentricity. As described in the Ref. [
14], tolerances in manufacturing and assembly processes generally lead to eccentricities of 5–10% at the end of line of motor productions. Other sources of eccentricity include material fatigue, corrosion, non-isotropic mass distribution, and poor lubrication. in the Ref. [
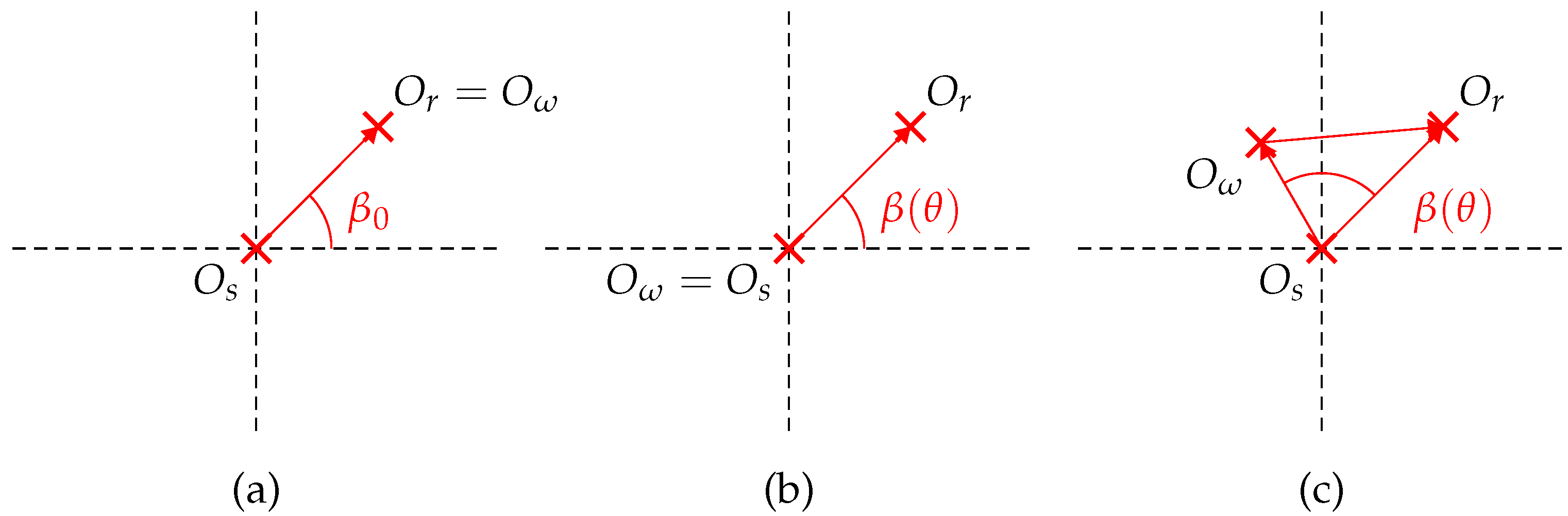
27], eccentricity is distinguished as three types: static eccentricity (SE), dynamic eccentricity (DE) and mixed eccentricity (ME). These three categories are schematized in
Figure 2.
In the case of SE, the rotor symmetry center
coincides with the rotor rotation center
, but not with the stator symmetry center
. This offset is constant regarding distance and angle in the stator reference frame. The degree of SE,
, is defined as
where
is the average air-gap length of the healthy machine. The minimum air-gap length is at the angle
.
and the other degrees of eccentricity are limited to values between zero and one. If they are one, the air-gap is zero at
, which means that the stator and rotor are in contact.
DE is typically caused by an unbalanced machine:
coincides with
, but not with
. This leads to a rotation of
around
in the stator reference frame according to the mechanical angle
. The non-uniform air-gap in the rotor reference frame translates into a rotation of the minimum air-gap length in the stator reference frame according to
The degree of DE,
, is
ME is the combination of SE and DE. Neither
,
nor
are aligned. As defined in the Ref. [
27], the degree of ME,
, and angle of the air-gap,
, changes with
according to
It is easy to prove that ME describes SE and DE if only one of them is present, which is why ME will be used to describe eccentricity in a general way.
3. Derivation of the General Solution
In order to solve Equation (
1), the contained functions have to be defined. In this work, the functions are approximated by even Fourier-series with an arbitrary number of harmonics, as highlighted in the Ref. [
20].
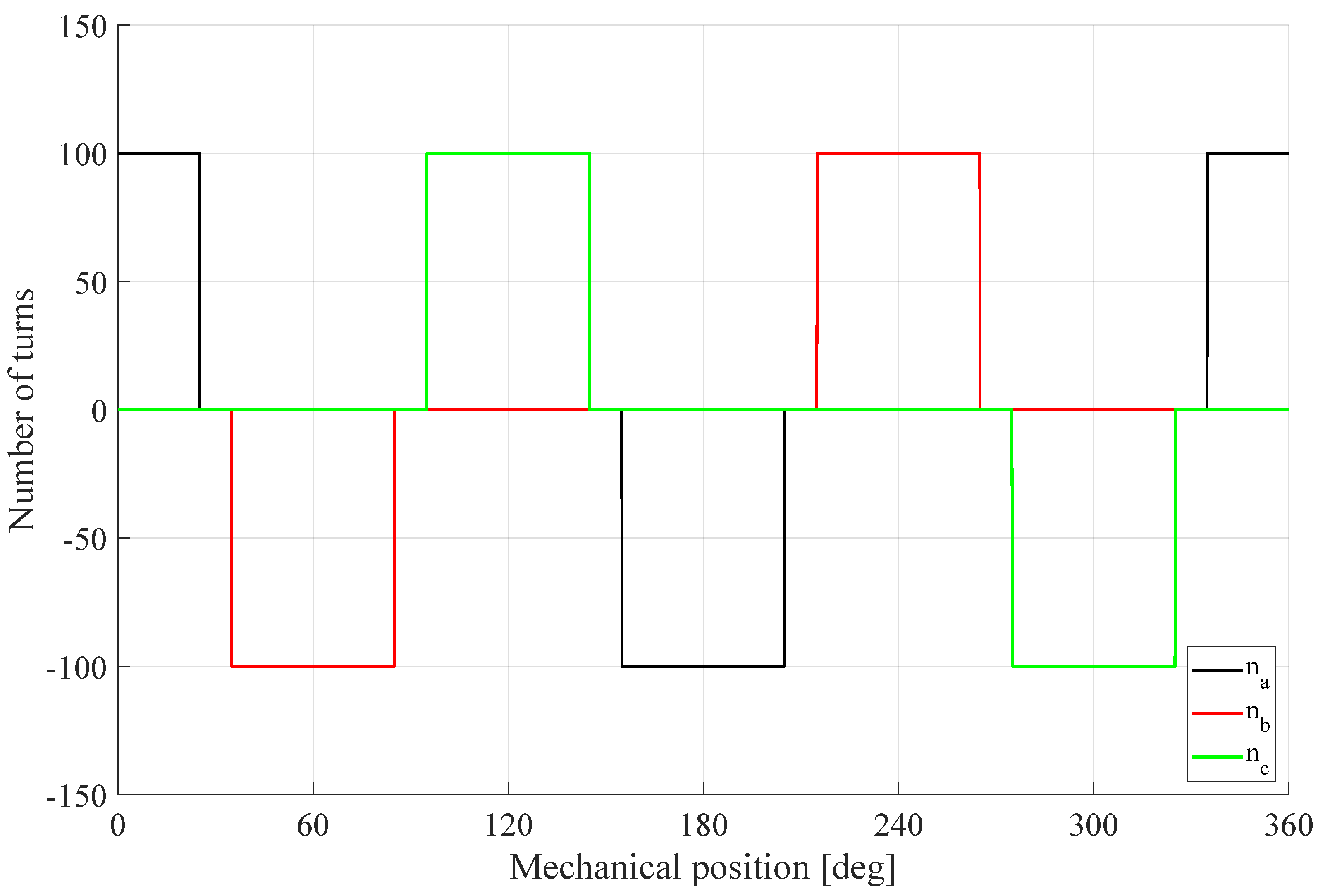
The turns function
describes the windings of the machine as the number of turns at every position
in the stator reference frame. Depending on the direction of the current in the turn, it is counted as positive or negative.
is defined as
where
is the number of harmonics considered,
is the coefficient of the
kth harmonic, and
is the phase shift of phase
x in the stator reference system. As
is an arbitrary angle, any symmetric winding can be phase-shifted to be even. This allows the Fourier-series to only contain cosines.
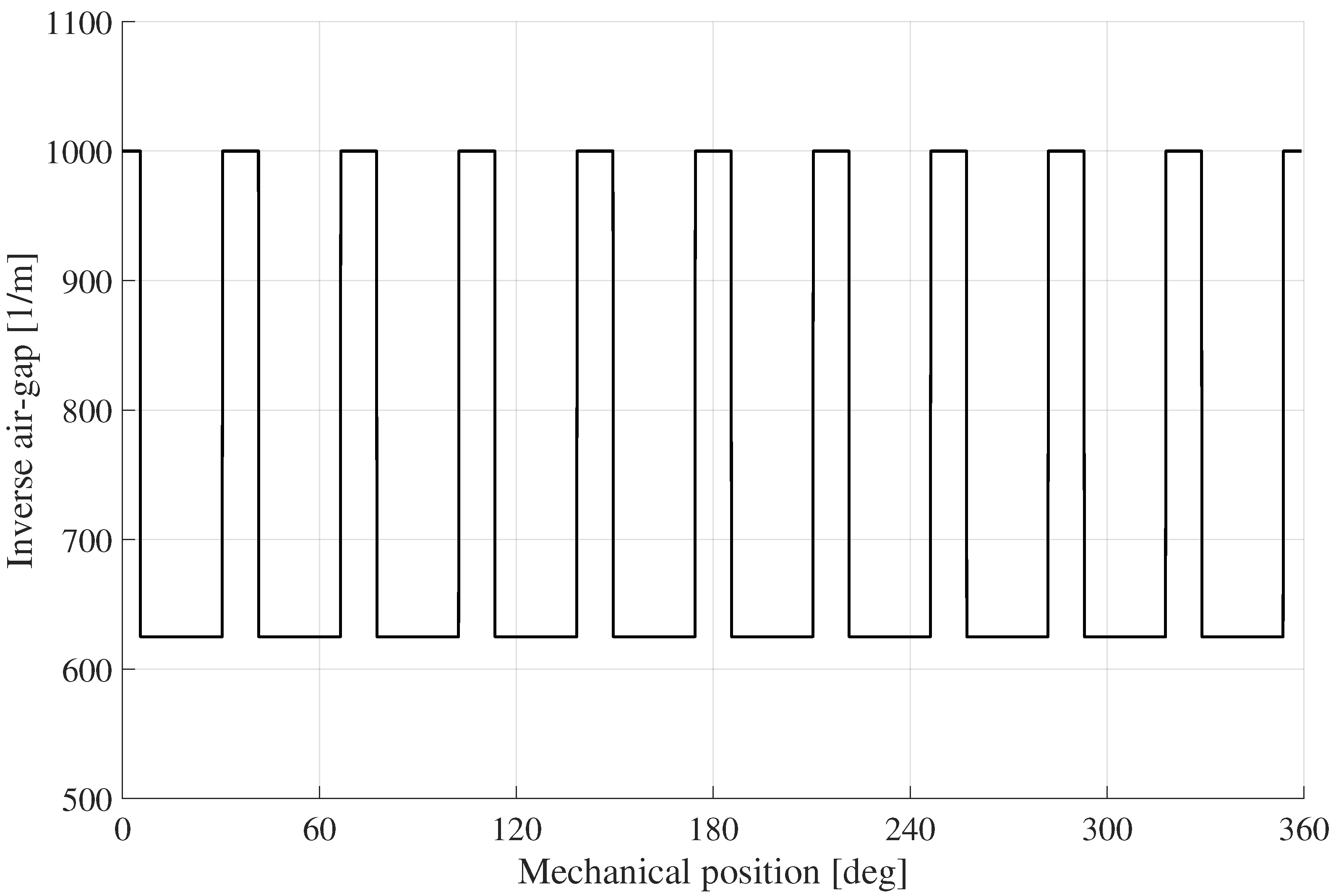
The inverse air-gap function
describes the inverse of the air-gap length between the stator and the rotor. It is highly dependent on the machine geometry and will change due to eccentricity. As the permeability of permanent magnets is close to the permeability of air, the air-gap includes any permanent magnet-filled slot. Its complete form is
The inverse air-gap function consists of two parts: the healthy machine contributes a Fourier-series of the symmetric air-gap in the form of a mean value
and even harmonics
, where
is the number of harmonics considered,
p is the number of pole pairs of the machine, and
is the coefficient of the harmonic
. If the machine sustains eccentricity, the mean value
of the air-gap changes according to
If no eccentricity is present, this equation simplifies to
. Eccentricity may also introduce
additional harmonics
, where
is the coefficient of the
tth harmonic and, as shown in the Ref. [
27], it is defined as
In the presence of eccentricity, some harmonics are considered both in the healthy machine formula, as well as in the eccentric one. This infers a change of harmonics existing in the healthy machine.
The modified winding function
, as introduced in the Ref. [
20], is defined as
with
being the mean value of the inverse air-gap function
.
Inserting
into Equation (
1) leads to
which can be extended into a sum of integrals by inserting Equation (
8)
where
. The addends
to
will be examined separately for readability purposes.
Inserting
into the first equation results in
This part only exhibits a mean value and describes the inductance of a healthy SPMSM. Using the assumptions introduced, the air-gap of a healthy SPMSM is constant. In the general equation, this can be achieved with , which removes all effects of the remaining terms –. An eccentric SPMSM can also be described on its own, although the derivation of the expression is not shown here as the general expression is sufficient to describe both SPMSMs and IPMSMs.
Examining the next part leads to
When multiplying the sums inside an integral, the highest harmonic present is defined by the smaller number between and . This is due to all higher harmonics created containing . As is the integration variable and the integration is always performed between 0 and , they have no contribution on the final result. Choosing for the resulting sum is arbitrary, as the amplitude of harmonics higher than are considered zero in , and therefore, in the resulting sum too. This property is considered true for all coefficients outside their defined range. Although this leads to unnecessary calculations when applying these equations, it greatly reduces their complexity without changing the result. A possibility to avoid these calculation steps is to check , , and and only perform the calculation if all necessary coefficients are defined.
Part
can be transformed to
Differently from the other cases, here the product of three sums is present. Nevertheless, the product of the sums of the turns functions can be proven to reduce to:
This formulation allows to bring the result into the more convenient following form:
Inserting Equation (
17) into Equation (
16) results in
and
are introduced for notation purposes. Their full expressions can be found in
Appendix A.
The notation introduced in Equation (
17) is used to solve part
too:
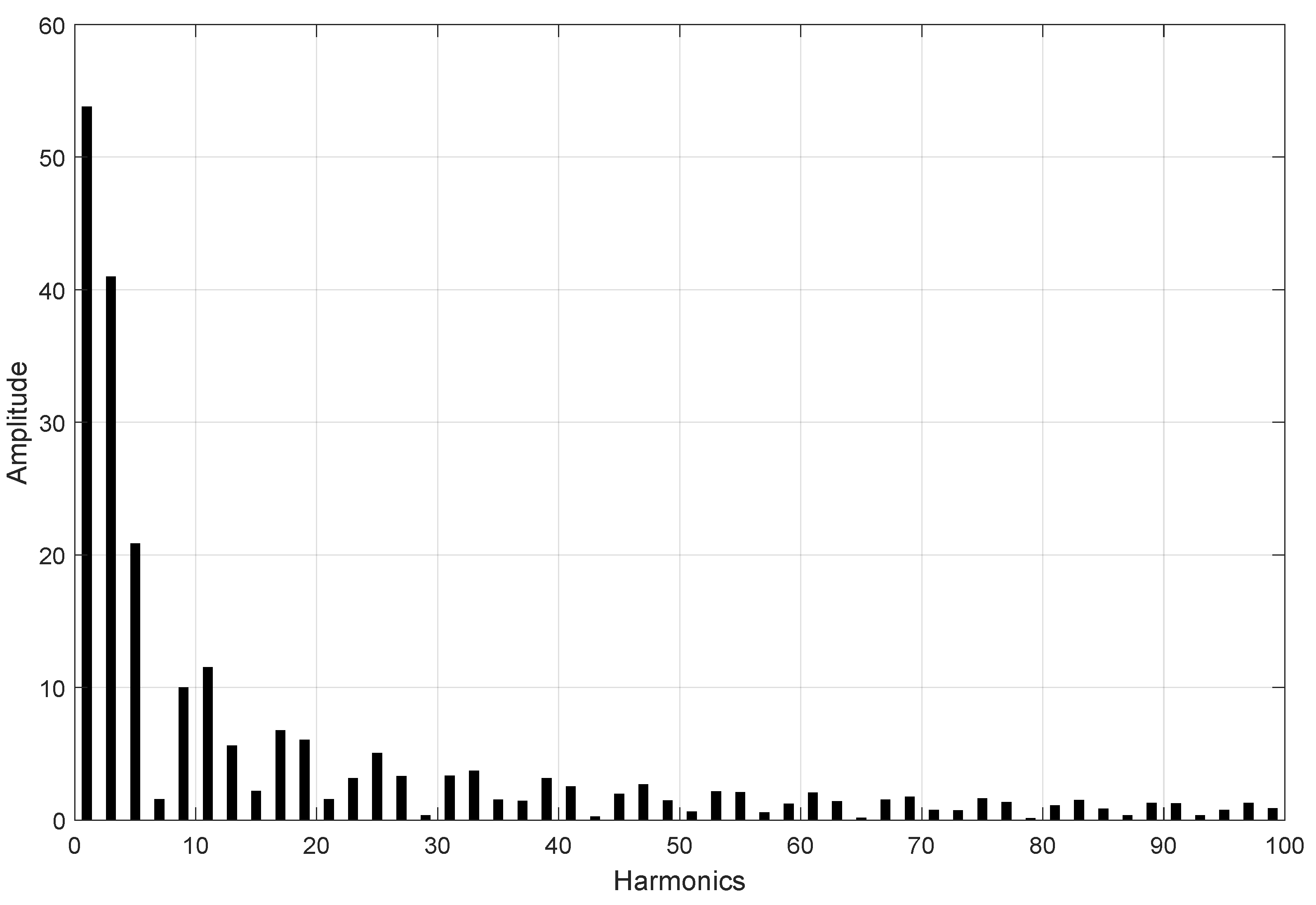
A highly interesting observation is the introduction of harmonics up to , which is twice as high as the number of harmonics considered in the initial function. The effective highest harmonic also depends on , as harmonics only have a non-zero amplitude if both the turns and the air-gap function coefficients are non-zero, but if is high enough, this statement is true.
All addends until this point have not contained eccentricity apart from the change in the mean value of the inverse air-gap. Therefore, replacing this value with the one of the healthy machine describes the inductance without eccentricity. Combining the partial results and rearranging them leads to
where
is the mean value of the inductance and the harmonics are described by the coefficient
and phase shift
. The full expression of these variables can be found in
Appendix A. This form clearly shows that, given the assumptions made, all present harmonics in a healthy machine are even. As the mechanical angle
always appears in connection with
, the harmonics are only referring to the electrical period.
The first term that includes eccentricity can be rewritten as
The general solution of part
still contains a product of two sums. As
and
are not equal at all times, Equation (
17) cannot be applied. This problem may simplify depending on the type of eccentricity present in the machine, which will be presented at a later point. If the solution cannot be simplified, the product of these sums represents harmonics around the already existing electrical ones introduced by eccentricity. Once again, the choice of
instead of
is arbitrary, as the coefficients of harmonics higher than
are zero.
Equation (
17) is applied to solve part
:
Part
is very similar to part
. Indeed, the only difference is a switch of
and
. The solution of
is, therefore, acquired by a minor change of Equation (
22), which results in
The last part requires the usage of Equation (
17), which leads to
Finally, combining all the addends
to
and rearranging the solution results in
This equation could be expressed in a more compact form. Nevertheless, it is chosen in order to illustrate the change in inductance due to eccentricity.
is the mean inductance of the healthy machine. This mean value is changed due to the replacement of
with
, which is represented by the correction
. An independent mean value due to eccentricity is introduced with
. The existing harmonics, as employed in Equation (
21), are corrected using
and
. The next two addends are, in the case of DE and ME, additional harmonics introduced due to eccentricity. These harmonics are directly linked to the mechanical angle
without the number of pole pairs
p. In the case of SE, these terms contribute to the mean value.
,
and all other introduced variables can be found in
Appendix A. The last part of Equation (
26) is the aforementioned product of two sums, which, determined by the type of eccentricity, introduces additional harmonics.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}