1. Introduction
Being a generalization of graphs and yet having its own unique complexity and utility, hypergraph theory has emerged as a completely new dynamic research area. The fundamental concepts of path, tree, trail, cycle and their different well-known properties have already found plenty of applications in real-world problems in networking systems [
1,
2] of different types or in the field of bioinformatics [
3,
4,
5]. The concept of the
hyperpath, called also the path (both terms being used in a synonymous way), in a hypergraph represents the foundation of many research works. In the majority of these studies, the hypergraphs are considered to be directed, though there are papers related to paths in the case of undirected hypergraphs as well. Nguyen and Pallottino [
6], in their work based on directed hypergraphs, have given some efficient algorithms in connection to some shortest path properties. In the same direction, we recall the work of Nielsen, Andersen and Pretolani [
7], where the authors present the procedures for finding the
K-shortest hyperpaths in a directed hypergraph. It is worth underlining that the area of research related to hyperpaths, shortest hyperpaths [
6] and their links with vehicle navigation [
1], network systems based on transit schedules [
2], cellular networks [
3], etc., is flourishing.
In this paper, we deal with two different problems related to hypergraphs. One concerns the behavior of hyperpaths under hyper-continuous mappings and pseudo-open mappings, while the other one is related to hyperpaths and hypertrees. Our study was motivated by the definition of the so-called
algebraic space [
8], introduced as a pair
, where
X is a non-empty arbitrary set and
a non-empty family of subsets of
X. An algebraic space can be seen as an extended version of a topological space but without having any closure property with respect to union or intersection, and it recalls the definition of the hypergraph to a great extent. As a result, the concept of pseudo-map or pseudo-continuity could be then defined between two hypergraphs. The key element of this parallel study is the new concept of the
knot, which is a subset of hyperedge intersection vertices. Since, in a hypergraph, the hyperedges appear as some subsets of the vertex set, it is trivial to note that the intersections of all possible adjacent hyperedges may contain more than one vertex. This fact leads to the intuitive notion of the knot that is the collection of explicit vertices. This notion further changes the dimension of perceiving the different concepts of hypergraphs such as walk, trail, path, tree, etc., where each of the adjacent hyperedge intersections gives rise to knots.
In graph theory, another important concept is that of the tree, which has been extensively used in networking, especially in theoretical computer science [
9]. A graph
G is a tree if there exists a unique path between any two vertices. Recall that the concept of the hypertree was introduced in hypergraph theory in terms of its host graph, as the hypergraph that admits a host graph that is a tree [
10]. We emphasize that this fundamental characterization of trees is not generalized in hypergraph theory, in the sense that there is no characterization of hypertrees merely in terms of hyperpaths. This motivated us to present, in the second part of the paper, a characteristic of hypertrees in terms of hyperpaths, without using the concept of the host graph.
The structure of this work can be summarized as follows. First, in
Section 2, we introduce the new concepts of point-hyperwalk, point-hypertrail and point-hyperpath, showing their differences in one illustrative example. Next, the key concepts of the knot and knot-hyperpath are defined. In
Section 3, the notions of the hyper-continuous map, strictly hyper-continuous map and pseudo-open map between two hypergraphs are introduced and the behavior of point-hyperpaths and knot-hyperpaths under these notions is observed. In particular, we prove that the image of a point-hyperpath under an injective pseudo-open mapping is a point-hyperpath, while the image of a knot-hyperpath under a pseudo-open map is again a knot-hyperpath. Regarding the inverse image, we show that the inverse image of a knot-hyperpath under a surjective hyper-continuous map is a weak knot-hyperpath, or a knot-hyperpath if the map is surjective and strictly hyper-continuous.
Section 4 is dedicated to the study of hypertrees. Based on the concept of equivalent entire knot-hyperpaths, we establish a sufficient condition under which a hypergraph becomes a hypertree. Moreover, we present an algorithm that extracts a host graph from a hypertree. A concluding section ends our study.
2. Preliminaries
Many definitions of hypergraphs exist; here, we will adopt the original one, given by Berge [
11]. A
hypergraph is a couple
defined by a finite set of
vertices (called also
nodes)
, with
, and the set
of non-empty subsets of
V, called
hyperedges. Two hyperedges
, with
, such that
are called
repeated hyperedges [
12]. In this paper, all hypergraphs are considered to be with no repeated hyperedges.
Definition 1 ([
13])
. Let be a hypergraph. By a hyperpath between two distinct vertices and in V, we mean a sequence of vertices and hyperedges having the following properties:- (i)
k is a positive integer;
- (ii)
are distinct vertices;
- (iii)
are hyperedges (not necessarily distinct);
- (iv)
for .
We call this sequence a –hyperpath.
Definition 2 ([
13])
. A hypercycle in a hypergraph on a vertex is a sequence , having the following properties:- (i)
k is a positive integer ;
- (ii)
is a –hyperpath;
- (iii)
at least one of the hyperedges is distinct from ;
- (iv)
for .
It is important to note that a path in a graph does not contain repeated edges, while this property is not retained in the definition of a hyperpath in a hypergraph as it appears in Definition 1. Since, in some cases, it is necessary to distinguish this special case; we define the following types of hyperpaths.
Definition 3. A point-hyperwalk in a hypergraph is a hyperpath as defined in Definition 1, where the vertices may be repeated. A point-hyperwalk where no hyperedge is repeated (but vertices may be repeated) is called a point-hypertrail. A point-hyperpath is a point-hypertrail in which vertices are not repeated.
In other words, a point-hyperpath is a point-hyperwalk where neither the edges nor the vertices are repeated.
The above definitions are illustrated in the following example.
Example 1. Let be a hypergraph with the vertex set and hyperedges such that
.
We represent this hypergraph in Figure 1. We notice that
is a point-hyperwalk, but not a point-hypertrail, because the hyperedge is repeated.
is a point-hypertrail. Here, the vertex is repeated, but there is no repetition of the hyperedges.
is a point-hyperpath, since hyperedges and vertices are not repeated.
Suppose that and are two hypergraphs. Let be a mapping and let denote an alternating sequence of vertices and edges in the hypergraph H. Then, we denote the f-image of this sequence as , where is the f-image of , respectively.
Generalizing the notions in Definition 1, we are ready to introduce the concepts of the knot and knot-hyperpath, where the vertices are replaced by a cluster of vertices, each of them behaving in a significant manner.
Definition 4. A knot K in a hypergraph is a non-empty subset of the intersections of some intersecting hyperedges. In other words, if is a hypergraph and K is a knot, then for some intersecting hyperedges and . In particular, if , then K is called an entire knot.
Definition 5. A knot-hyperpath in a hypergraph between two vertices and is an alternating sequence of knots and hyperedges of the following type:where , with , and s are distinct hyperedges. If for all , then the knot-hyperpath is called the entire knot-hyperpath.
Although the entire knot-hyperpath is a particular case of the knot-hyperpath, its significance can be seen in
Section 4.
From the constructions of knots, it is clear that knots are mutually disjointed. Here, n is called the length of the knot-hyperpath.
Example 2. By taking the hypergraph defined in Example 1, we can observe thatis a knot-hyperpath of length 5. Definition 6. Two knot-hyperpathsandof the same length of a hypergraph are called equivalent
or isomorphic
if - (i)
,
- (ii)
for all .
The above definition further can be generalized to a finite number of knot-hyperpaths (entire knot-hyperpaths) , where and the intersections in items (i) and (ii) are taken as follows:
- (i)
- (ii)
for all .
Example 3. Consider the hypergraph H, with the vertex setand the hyperedges . It can be easily verified that the following two knot-hyperpathsandare equivalent. We notice also that and are entire knot-hyperpaths, whileandare not equivalent because the last two knots of the knot-hyperpaths and have empty intersections. Definition 7 ([
8])
. A mapping from the vertex set of a hypergraph to the vertex set of another hypergraph is said to be pseudo-open (in short, ps-open) if, for each hyperedge in E, the corresponding image is a hyperedge in . Example 4. Let and be two hypergraphs with the vertex sets and and the hyperedge sets , , respectively. Define the map such that , , , . Then, , , . Thus, for each , we have . Hence, f is a ps-open mapping.
Definition 8. A hypergraph is called connected if, for any two distinct vertices and , there exists a hyperpath joining and .
Definition 9. In a hypergraph , a sequenceis called a weak knot-hypergraph if each , () with for all . 3. Hyperpaths and Hypercontinuity
In this section, we check whether the pseudo-open maps preserve the notion of the point-hyperpath and knot-hyperpath between two hypergraphs and under which conditions. Then, the notions of the hyper-continuous map and strictly hyper-continuous map between two hypergraphs are stated and various possible relationships between any two knot-hyperpaths under these notions are investigated.
Definition 10. A mapping between the vertex sets of two hypergraphs and is called hyper-continuous if, for any , there is some such that the corresponding inverse image satisfies .
Example 5. Suppose that and are two hypergraphs, where and and , . A map is defined such that , , , . Now, we have and . Again, and . Moreover, and .
Thus, for each , there is one , such that . Thus, f is a hyper-continuous map from V to .
Definition 11. A mapping between the vertex sets of two hypergraphs and is called strictly hyper-continuous if, for each , there is an , such that .
Example 6. Suppose that and are two hypergraphs, where and and , . A map is defined such that , , , . Now, we have and . Again, and . Moreover, we have and .
Thus, for each , , there exists an such that . Thus, f is strictly hyper-continuous.
Theorem 1. Suppose that and are two hypergraphs and f is a mapping from V into . If f is a ps-open mapping, then the f-image of a point-hyperwalk in H is a point-hyperwalk in K.
Proof. Let
be a point-hyperwalk in
H. Then, we obtain its
f-image
Since P is a point-hyperwalk, it follows that and . Thus, , . Now, implies that , whence . Therefore, . Similarly, . Hence, is a point-hyperwalk in K. □
Corollary 1. In Theorem 1, if f is an injective mapping, then the f-image of a point-hyperpath in H is a point-hyperpath in K, too.
Theorem 2. Suppose that and are two hypergraphs and f is a ps-open mapping from V to . Then, the f-image of a knot-hyperpath in H is a knot-hyperpath in K, too.
Proof. Let
be a knot-hyperpath in
H with
and
. Then, we have the
f-image
In order to prove that is a knot-hyperpath, we first show that and . Since and , we have and .
Since , we have . It follows that . Hence, .
Similarly,
implies that
and so on. Thus,
implies that
for any
. Hence, we conclude that
is a knot-hyperpath in
K. □
Theorem 3. Suppose that and are two hypergraphs. If f is a hyper-continuous map from V onto , then the inverse image of a knot-hyperpath in K under f is a weak knot-hyperpath in H.
Proof. Let
be a knot-hyperpath in
K. As
f is hyper-continuous, we have
, for some hyperedges
. Moreover, the sets
are nonempty because
f is an onto mapping. Now, the inverse image of the knot-hyperpath can be written as
where
, for
. Since the inverse set function behaves well for union, intersection and complement, it follows that the conditions of a knot-hyperpath are easily satisfied. Hence,
is a weak knot-hyperpath. □
Corollary 2. The inverse image of an onto strictly hyper-continuous map of a knot-hyperpath is again a knot-hyperpath.
Proof. Consider the knot-hyperpath
as in the proof of Theorem 3. As
f is strictly hyper-continuous, each
belongs to
E and, by using similar arguments, we can conclude that
is a knot-hyperpath. □
Theorem 4. Let be a ps-open mapping from a hypergraph onto a hypergraph . If H is connected, then K is connected, too.
Proof. Let and be two any vertices in K. Since f is onto, there exists , such that and . Moreover, since H is connected and , , there exists a knot-hyperpath P from to . Because the image of a knot-hyperpath under a ps-open mapping is again a knot-hyperpath in K, starting at and ending at , we immediately conclude that K is connected. □
4. Hyperpaths and Hypertrees
In this section, we will present a sufficient condition, only involving hyperpaths, under which a hypergraph is a hypertree. Till now, the definition of a hypertree has been based on the concept of the host graph.
Definition 12 ([
14])
. Suppose that is a hypergraph and is a graph over the same vertex set V. We say that G is a host graph of H if each hyperedge induces a connected subgraph in G. Lemma 1. There exists at least one host graph G of the hypergraph H in which the induced subgraph obtained from any two equivalent knot-hyperpaths never forms a cycle.
Proof. Let
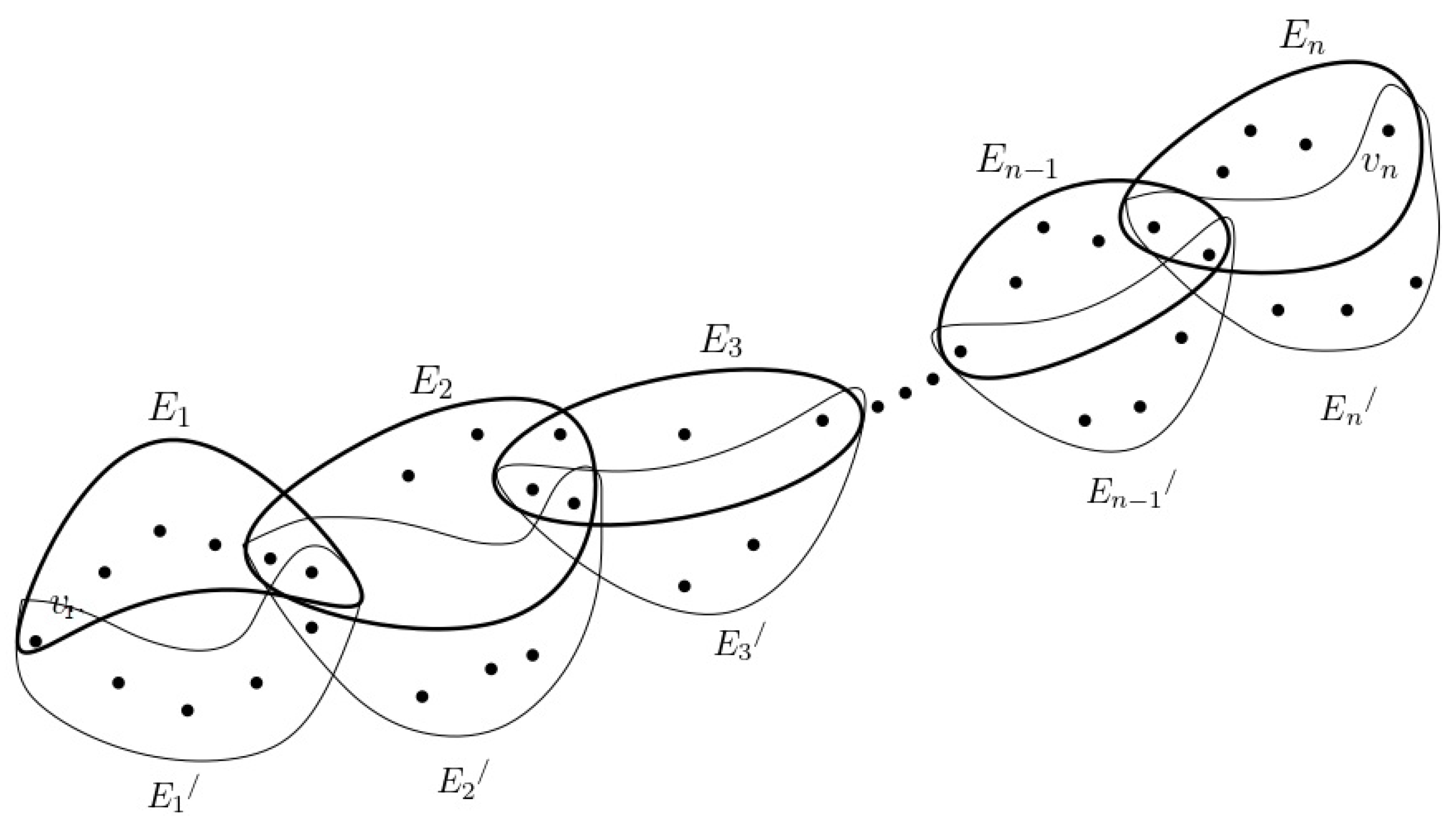
and
be any two equivalent knot-hyperpaths of the hypergraph
H, which may be denoted as follows:
and
and graphically represented in
Figure 2.
Since they are equivalent knot-hyperpaths, it follows that , , , and .
We note that
can be expressed as the disjoint union of
,
and
. As we know that, in any host graph of a hypergraph, all the vertices in a hyperedge are connected, and since
is contained in
and
, it follows that all the vertices in
can be connected to form a graph without cycles. Moreover, since
and
are contained in
, a graph can be drawn by connecting all the vertices in
without forming a cycle, which can be further connected with the cycle-free graph drawn in
in the previous step. By connecting vertices in such a manner, the resultant graph will never form a cycle. Similarly, a graph can be drawn by connecting the cycle-free graph drawn in
with a cycle-free graph in
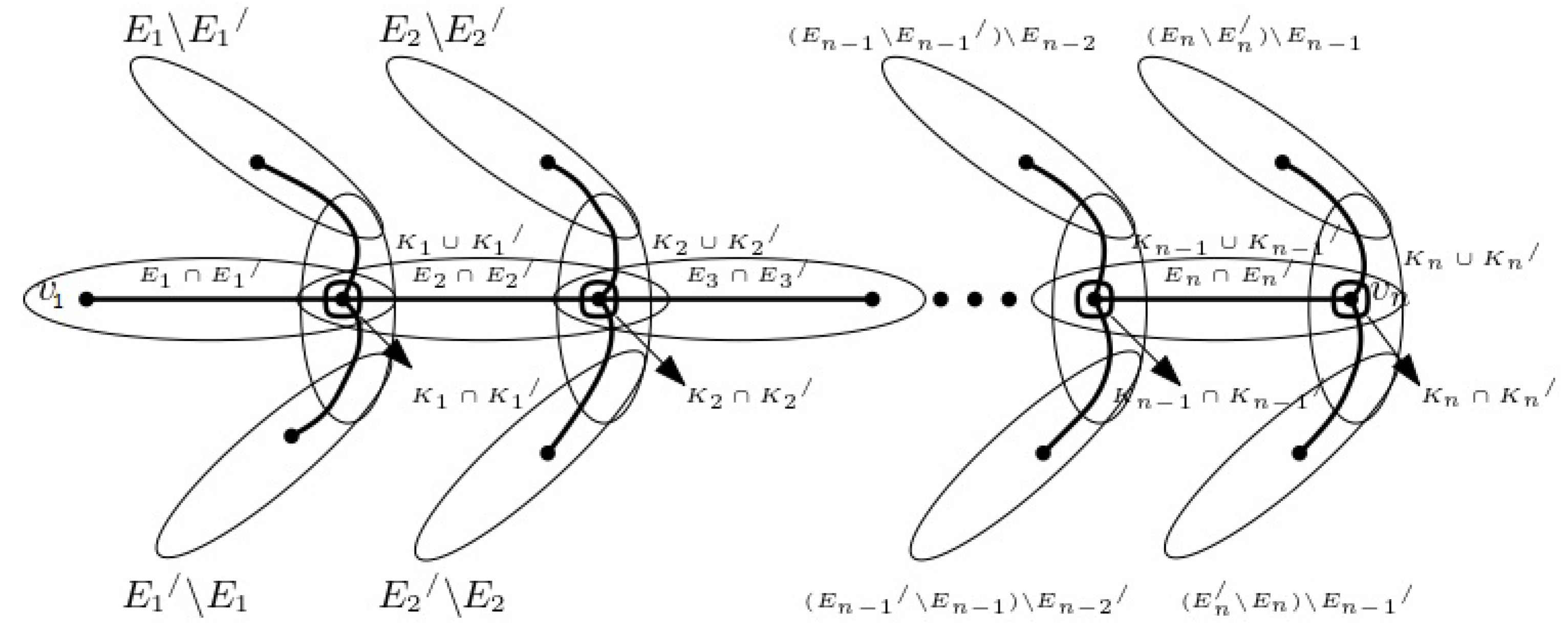
. All these constructions are depicted in
Figure 3.
The model is constructed in such a way that the vertex is connected to and is connected to both and through without forming a cycle. Furthermore, it is to be noted that because is connected to , in the next step, will connect to those vertices of that are not in , in order to not create a cycle. Similarly, will connect to those vertices of that are not in . This further continues till the last vertex , where is connected to and is connected to and through , without forming a cycle. In this manner, a host graph can be drawn from the hypergraph H, where the induced subgraph obtained from the vertices in the edges of the two paths is cycle-free. We conclude that there exists at least one host graph G of H in which the induced subgraph obtained from the two equivalent knot-hyperpaths will never form a cycle. □
Remark 1. If the induced subgraph obtained from the vertex set of two knot-hyperpaths joining the same vertices of any host graph of a hypergraph always produces a cycle, then the knot-hyperpaths are not equivalent.
Theorem 5. Suppose that H is a connected hypergraph, which is a hypertree. Then, any entire knot-hyperpaths having the same length and connecting any two vertices are equivalent.
Proof. Let
and
be any two entire knot-hyperpaths of the hypergraph
H, which may be denoted as follows:
and
If and are equivalent knot-hyperpaths, then the result is proven.
On the contrary, if
and
are not equivalent, then there exists a pair of edges
, where
is from
and
is from
, such that
. Since
and
, we have
. Moreover, let
be the edges such that
, while
for any
. Then, the edges
to
and
to
will always form a cycle (see
Figure 4) in any host graph of H, which is a contradiction. Therefore,
and
are equivalent. Thus, we can conclude that if
H is a hypertree, then, between any two vertices, the entire knot-hyperpaths having the same length are unique up to isomorphism. □
It is to be noted that two knot-hyperpaths joining two vertices in a hypertree may not always be equivalent. This can be observed in Example 7 by introducing an extra edge to the hypergraph, which subsequently produces two knot-hyperpaths joining and , but with different lengths.
Theorem 6. Suppose that H is a hypergraph such that, between any two vertices, there exists a unique entire knot-hyperpath up to isomorphism. Then, H is a hypertree.
Proof. By hypothesis, between any two vertices
and
of
H, there exists an entire knot-hyperpath, which is unique up to isomorphism. It follows that
H is connected. To show that H is a hypertree, it is enough to show that
H admits a host graph that is a tree. Let
be an entire knot-hyperpath joining the vertices
and
. Then, the vertices contained in the edges of this knot-hyperpath can be joined without forming a cycle, in such a way that the constructed graph
is an induced subgraph with vertex set
of some host graph
G of the given hypergraph
H. Now, if
, then we can take
, which is a tree. Hence, in this case,
H is a hypertree and the theorem is proven.
If
, then let
be such that
. Let
be an entire knot-hyperpath joining the vertices
and
. We note that there may exist some hyperedges in
that coincide with the hyperedges of
P. Now, excluding these common hyperedges, the rest of the hyperedges of
can be joined without forming a cycle. In this way, an induced subgraph
can be formed with vertex set
and the edges set as the union of those edges common with
and the edges newly formed from hyperedges of
, which are not in
P. It is clear from the construction that both subgraphs
and
are not cyclic and the union
is connected; otherwise,
H would have two entire knot-hyperpaths joining the same vertices, but not equivalent (see proof of Theorem 5). Now, if
, then
is the host graph of
H that is a tree and hence
H is again a hypertree.
If
, then there exists a vertex
that is not in
. Then, we will have an entire knot-hyperpath
joining
and
as follows:
Now, excluding those hyperedges of that are common with P and , the rest of the hyperedges of can be joined without forming a cycle. In this way, an induced subgraph can be formed with vertex set and the edges set as the union of those edges common with and the edges newly formed from hyperedges of that are not in P and . It is clear from the construction that all the subgraphs and are not cyclic and the union is connected. Now, if , then is the host graph of H that is a tree and hence H is a hypertree.
As the vertex set of the hypergraph is finite, the process has a finite number of steps. Thus, we can conclude that if H is a hypergraph such that, between any two vertices, there exists an entire knot-hyperpath unique up to isomorphism, then H is a hypertree. □
Remark 2. We can notice that the hypergraph considered in Example 3 is a hypertree, but the two knot-hyperpaths and joining the vertices and are not equivalent, even though they have the same length, while all the entire knot-hyperpaths (for example, and ) are equivalent. Hence, the property of knots of being entire, in the above two theorems, is an important hypothesis to be considered.
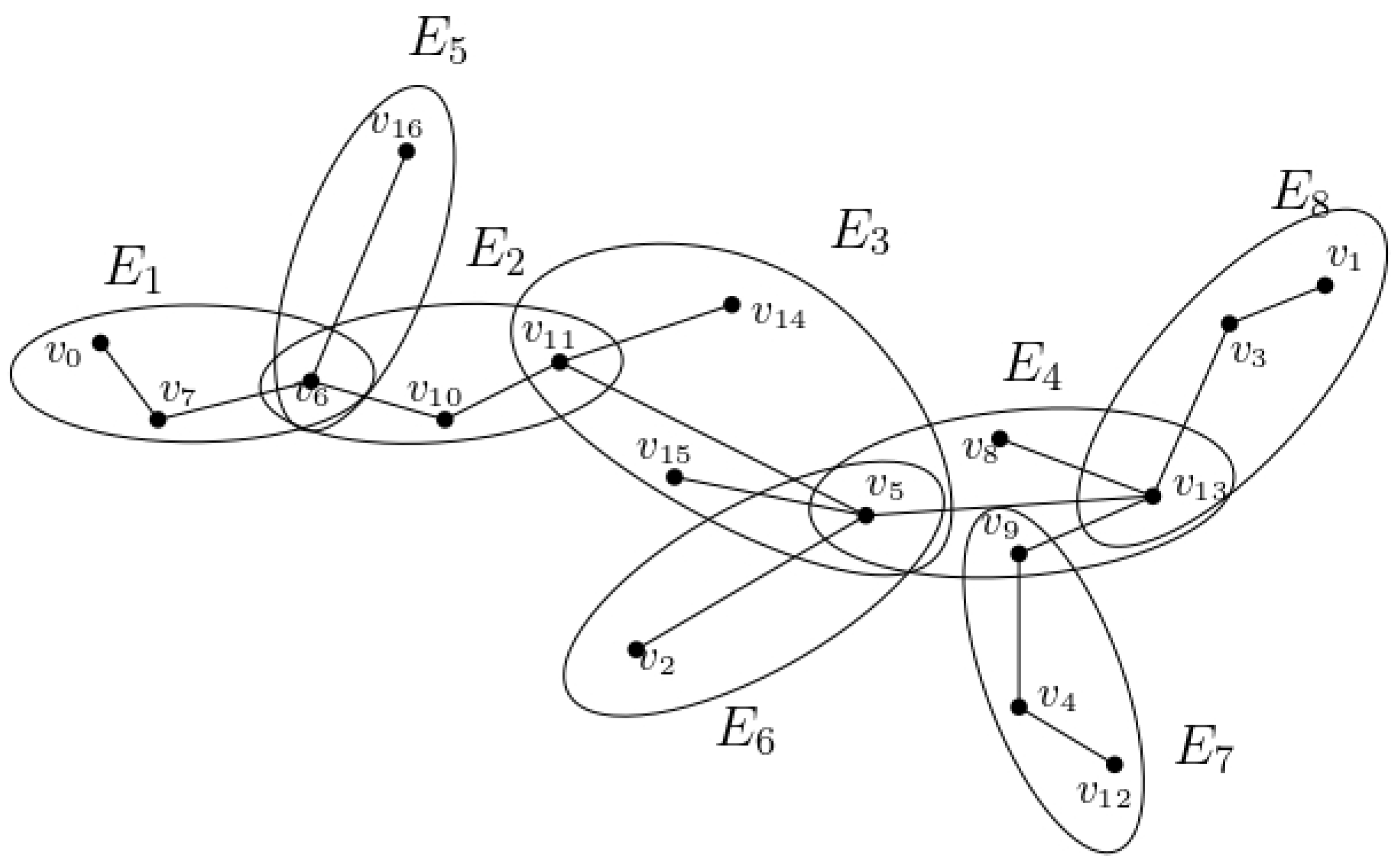
To illustrate the algorithm stated in the proof of Theorem 6, we present the following example, where the considered hypergraph is a hypertree and a host graph is drawn using the technique used in the proof of Theorem 6. This hypertree is represented in
Figure 5.
Example 7. Consider the hypergraph , where and . One can easily verify that H is a hypertree and, between any two vertices, there exists an entire knot-hyperpath, unique up to isomorphism. Now, we will use the technique used in the proof of Theorem 6, in order to obtain a host graph that is a tree.
Let us consider the vertices and and the knot-hyperpathjoining and . Now, the vertices in all hyperedges are connected and form a graph in such a way that it is not cyclic and it is an induced subgraph with vertex set of some host graph G of H. Clearly, , and so we consider the vertex , which is not in . Now, a hyperpath from to is constructed as follows: Clearly, except , all other hyperedges of this knot-hyperpath appear in the previous knot-hyperpath, and so vertices of are joined in an acyclic way and represent a graph with vertex set .
Here, we note that the union of the two graphs and is acyclic and connected. Moreover, . Therefore, we consider an arbitrary vertex from that is not in . Let us consider the vertex and the knot-hyperpath constructed as follows: Clearly, except , all other hyperedges of this knot-hyperpath appear in the previous knot-hyperpaths, and so vertices of are joined in an acyclic way that represents a graph with vertex set . Thus, is connected and acyclic. Since , we consider the vertex , the only one that is not in this union and the knot-hyperpath Clearly, except , all other hyperedges of this knot-hyperpath appear in the previous knot-hyperpaths, and so vertices of are joined in an acyclic way that represents a graph with vertex set . Now, is connected and acyclic, and . Therefore, is the required host graph, which is a tree.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




