
Three-Legged Compliant Parallel Mechanisms: Fundamental Design Criteria to Achieve Fully Decoupled Motion Characteristics and a State-of-the-Art Review

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
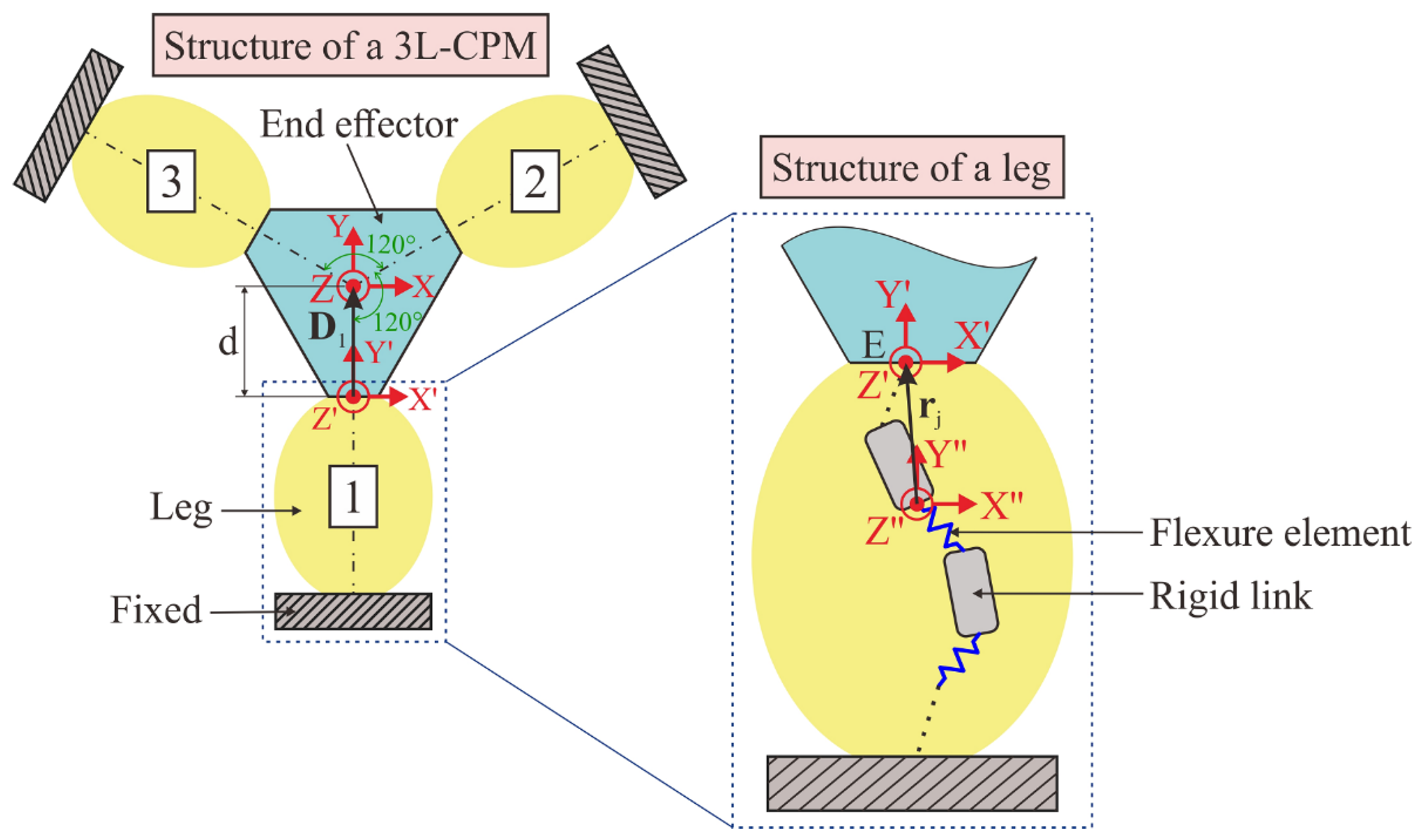
2. Stiffness Modeling of a Decoupled-Motion 3L-CPM
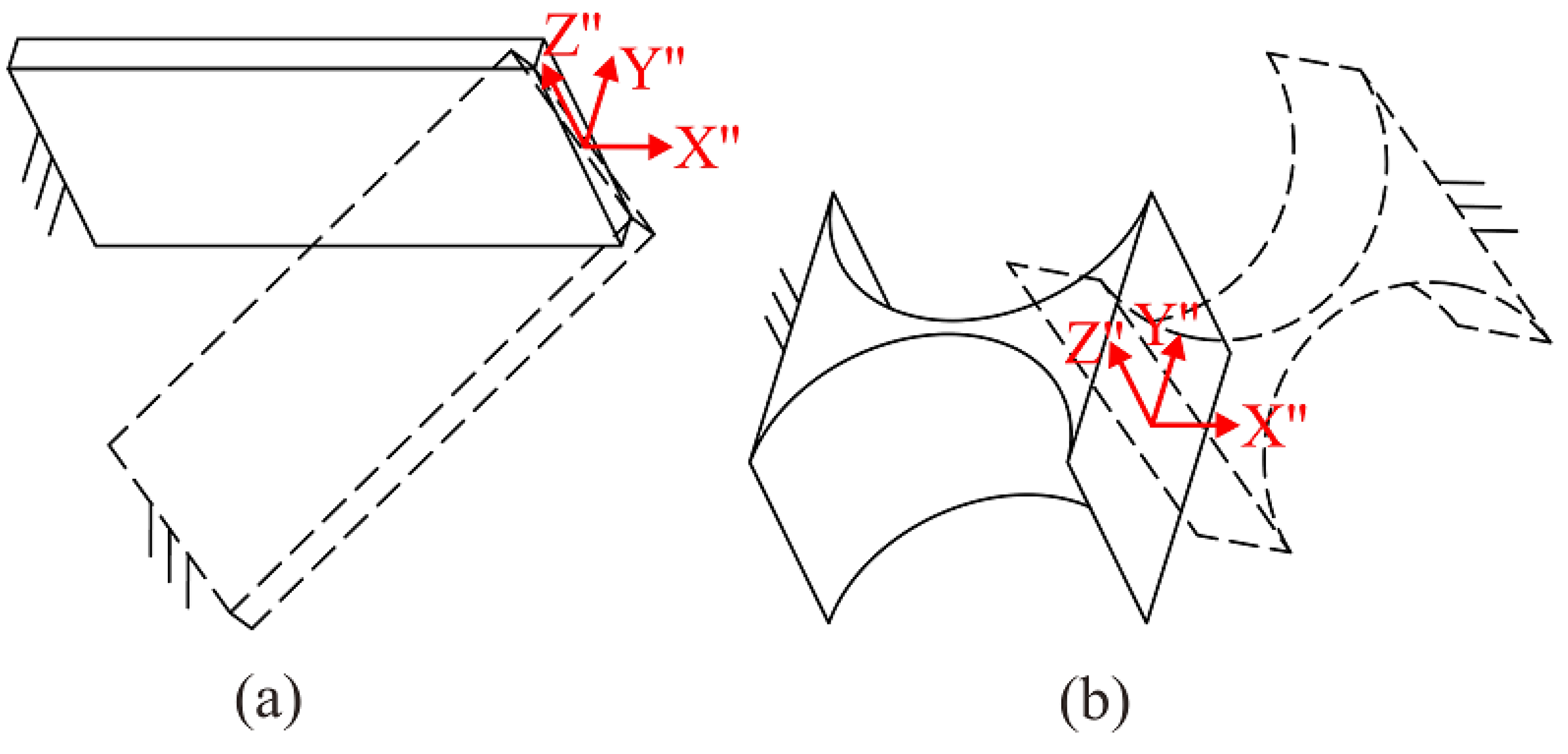
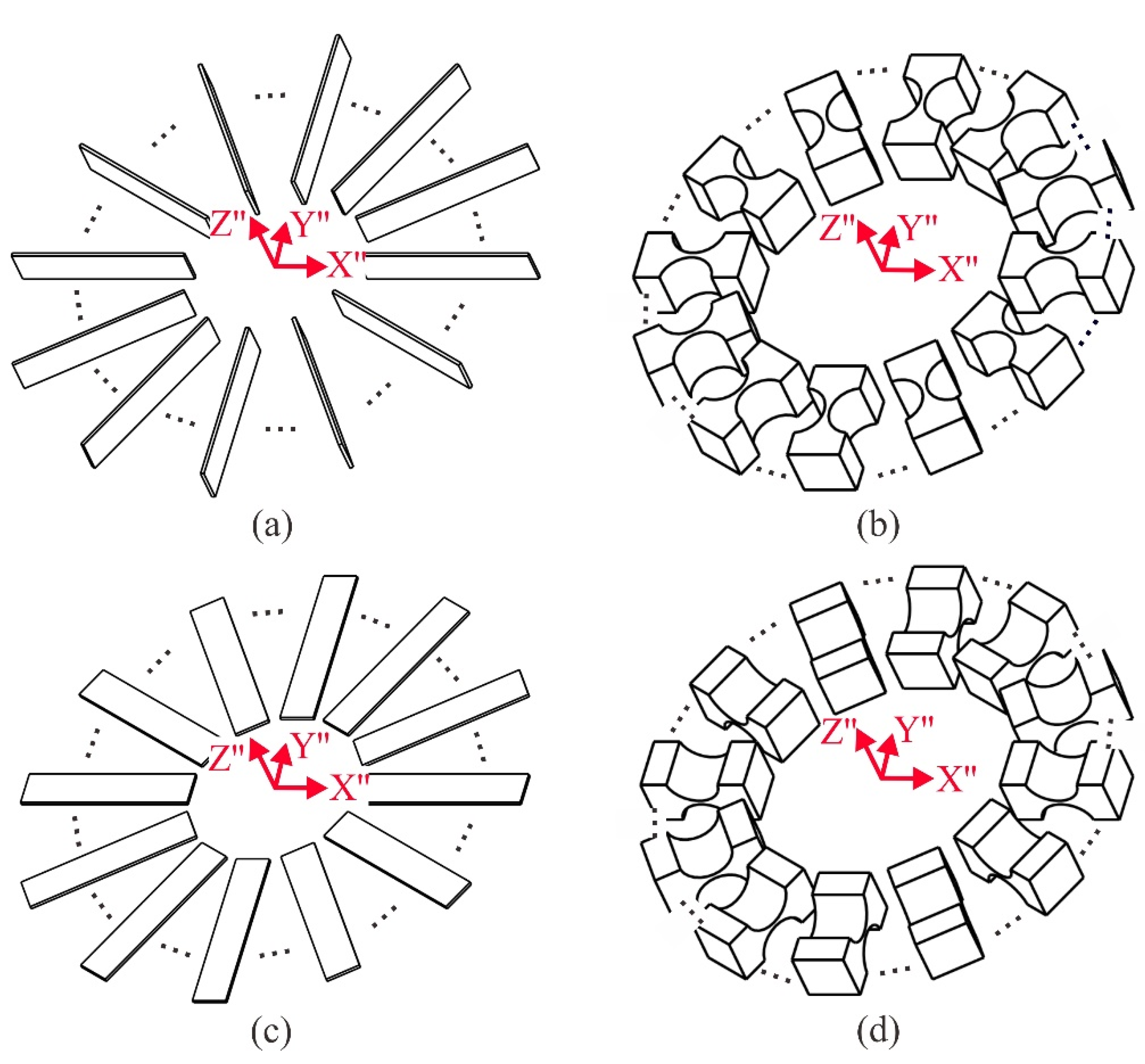
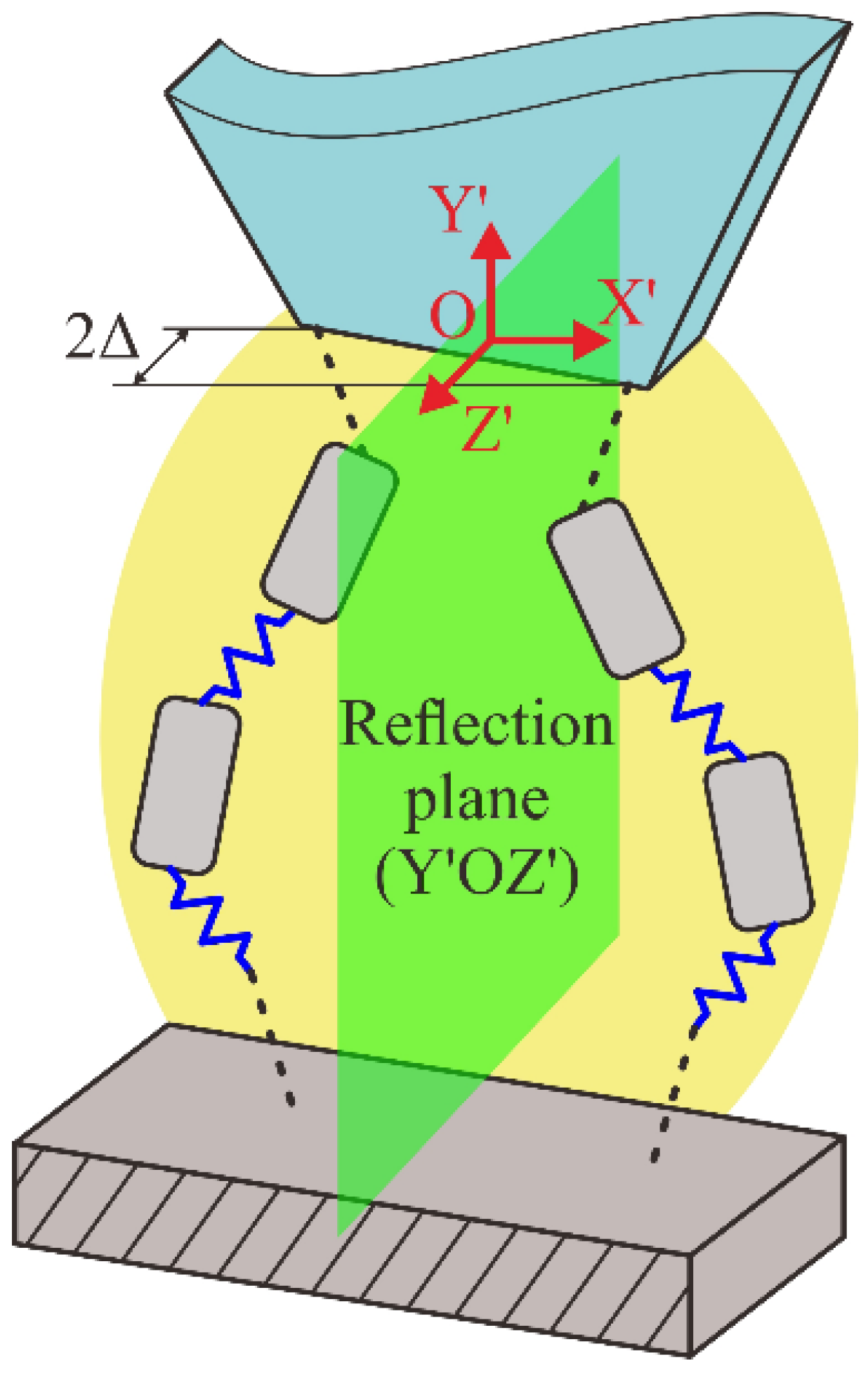
3. Characteristics of Flexure Elements in Decoupled-Motion 3L-CPMs
4. Stiffness Analysis of 3L-CPMs Containing Two Serial Flexure Chains in a Leg
5. Review and Analysis of the Motion Characteristics of Existing 3L-CPMs
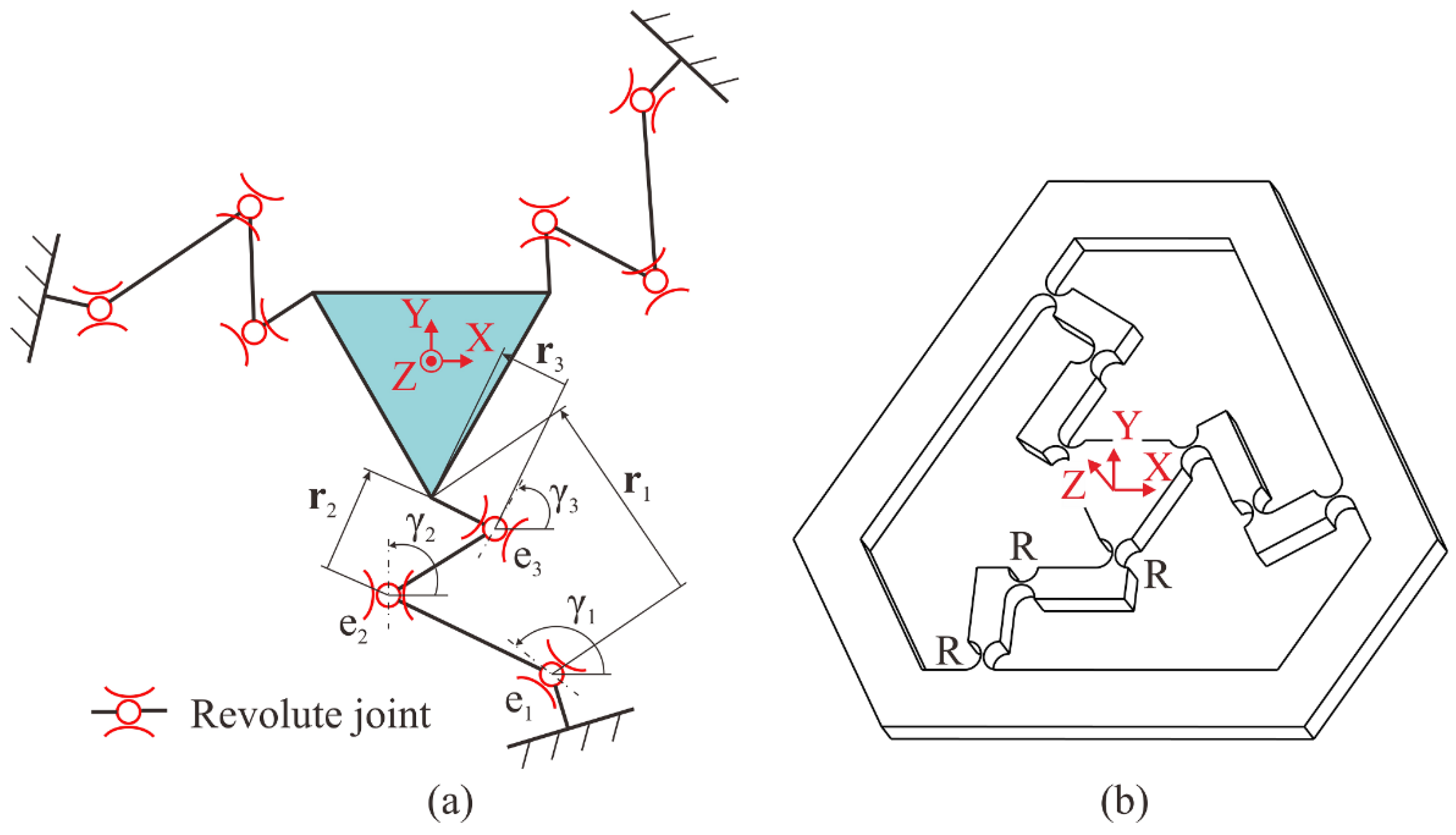
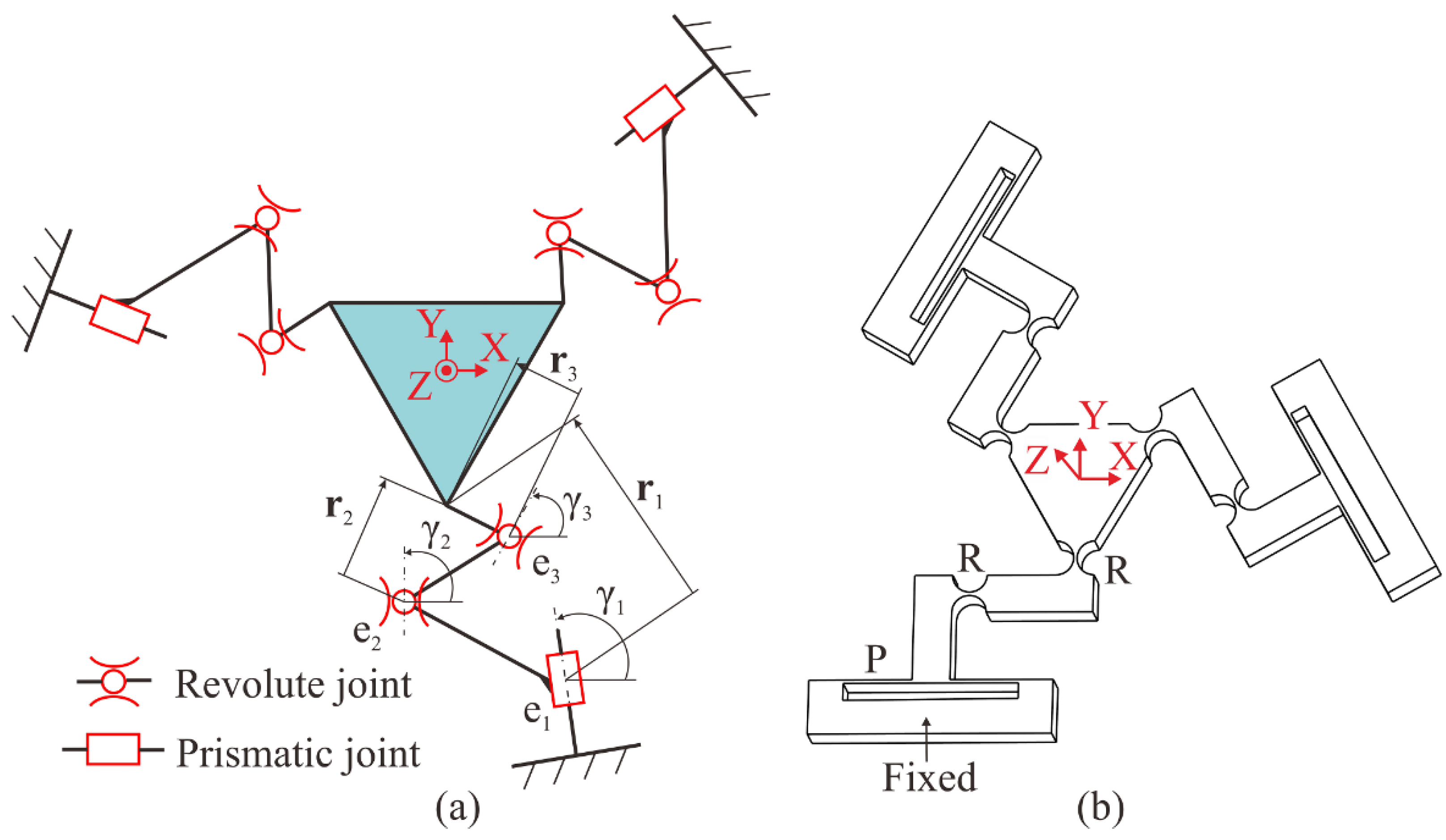
5.1. Three-Legged Revolute–Revolute–Revolute and Three-Legged Prismatic–Revolute–Revolute CPMs
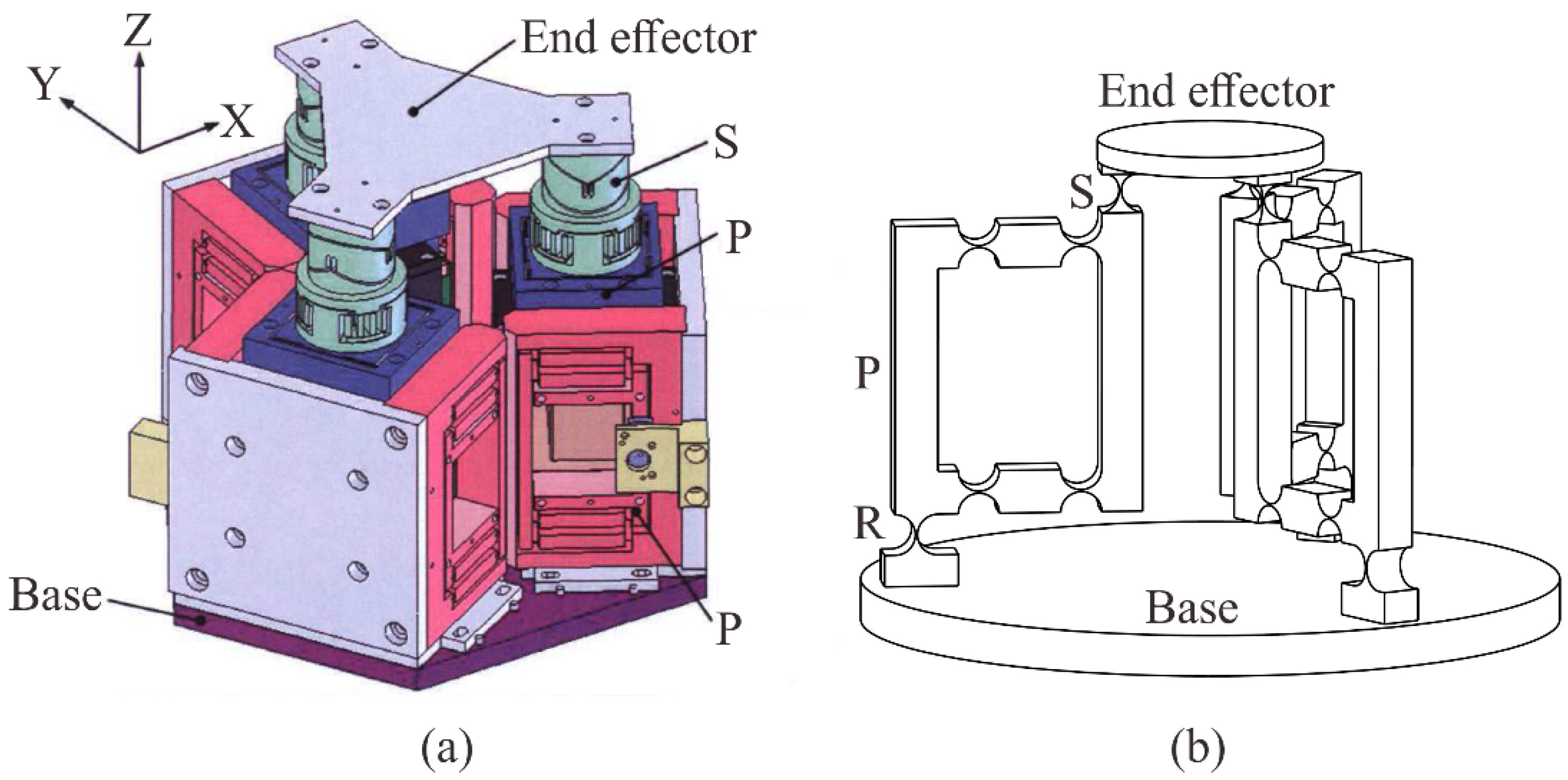
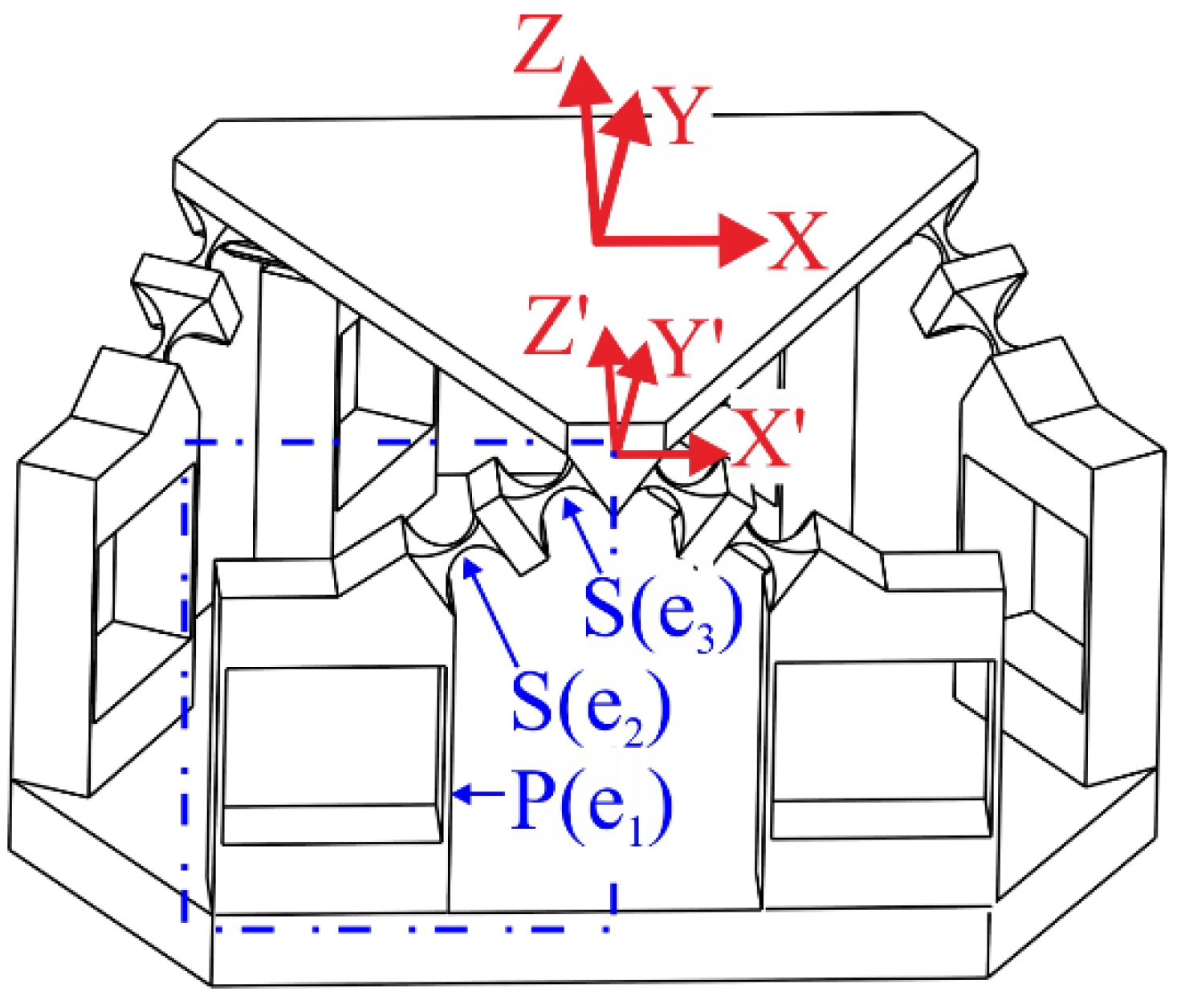
5.2. Three-Legged Prismatic–Prismatic–Spherical and Three-Legged Revolute–Prismatic–Spherical CPMs
5.3. Three-Legged Prismatic–Revolution–Prismatic–Revolution CPMs
5.4. Three-Legged CPM with Paired Prismatic–Spherical–Spherical Configuration
5.5. Six-DOF 3L-CPM Synthesized by Constrained-Based Method
5.6. Six-DOF 3L-CPM Synthesized by Optimization Method
5.7. Three-DOF Planar-Motion 3L-CPM Synthesized by Optimization Method
5.8. Three-DOF Spatial-Motion 3L-CPMs Synthesized by Optimization Method
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Stiffness Characteristics of Some Common Types of Flexure Element

Appendix B. Conditions of the Leg’s Compliance Matrix for Decoupled Motions
Appendix C. Inversion of the Compliance Matrix of a Leg in a Typical Decoupled-Motion 3L-CPM
Appendix D. Compliance Matrix of a Leg in 3RRR- and 3PRR-3L-CPMs
Appendix E. Components in the Compliance Matrix of a Leg in the 3-DOF (X-Y-Z) 3PRPR-3L-CPM
Appendix F. Components in the Compliance Matrix of a Leg in the 6-DOF 6PSS-3L-CPM
References
- Wang, D.H.; Yang, Q.; Dong, H.M. A Monolithic Compliant Piezoelectric-Driven Microgripper: Design, Modeling, and Testing. IEEE/ASME Trans. Mechatron. 2013, 18, 138–147. [Google Scholar] [CrossRef]
- Wang, F.; Liang, C.; Tian, Y.; Zhao, X.; Zhang, D. Design and Control of a Compliant Microgripper with a Large Amplification Ratio for High-Speed Micro Manipulation. IEEE/ASME Trans. Mechatron. 2016, 21, 1262–1271. [Google Scholar] [CrossRef]
- Teo, T.J.; Yang, G.; Chen, I.M. A flexure-based electromagnetic nanopositioning actuator with predictable and re-configurable open-loop positioning resolution. Precis. Eng. 2015, 40, 249–260. [Google Scholar] [CrossRef]
- Teo, T.J.; Bui, V.P.; Yang, G.; Chen, I.M. Millimeters-Stroke Nanopositioning Actuator with High Positioning and Thermal Stability. IEEE/ASME Trans. Mechatron. 2015, 20, 2813–2823. [Google Scholar] [CrossRef]
- Teo, T.J.; Chen, I.M.; Yang, G. A large deflection and high payload flexure-based parallel manipulator for UV nanoimprint lithography: Part II. Stiffness modeling and performance evaluation. Precis. Eng. 2014, 38, 872–884. [Google Scholar] [CrossRef]
- Pham, M.T.; Teo, T.J.; Yeo, S.H.; Wang, P.; Nai, M.L.S. A 3D-printed Ti-6Al-4V 3-DOF compliant parallel mechanism for high precision manipulation. IEEE/ASME Trans. Mechatron. 2017, 22, 2359–2368. [Google Scholar] [CrossRef]
- Pham, M.T.; Yeo, S.H.; Teo, T.J.; Wang, P.; Nai, M.L.S. Design and Optimization of a Three Degrees-of-Freedom Spatial Motion Compliant Parallel Mechanism with Fully Decoupled Motion Characteristics. J. Mech. Robot. 2019, 11, 051010. [Google Scholar] [CrossRef]
- Teo, T.J.; Yang, G.; Chen, I.M. Compliant Manipulators. In Handbook of Manufacturing Engineering and Technology; Springer: London, UK, 2014; pp. 2229–2300. [Google Scholar]
- Thomas, T.L.; Kalpathy Venkiteswaran, V.; Ananthasuresh, G.K.; Misra, S. Surgical Applications of Compliant Mechanisms: A Review. J. Mech. Robot. 2021, 13, 020801. [Google Scholar] [CrossRef]
- Huang, H.; Pan, Y.; Pang, Y.; Shen, H.; Gao, X.; Zhu, Y.; Chen, L.; Sun, L. Piezoelectric Ultrasonic Biological Microdissection Device Based on a Novel Flexure Mechanism for Suppressing Vibration. Micromachines 2021, 12, 196. [Google Scholar] [CrossRef]
- Shinde, S.M.; Lekurwale, R.R. Synthesising of flexural spindle head micro drilling machine tool in PLM environment. Int. J. Virtual Technol. Multimed. 2021, 1, 246–264. [Google Scholar] [CrossRef]
- Shinde, S.M.; Lekurwale, R.R. Radial stiffness computation of single Archimedes spiral plane supporting spring loaded in flexural mechanism mounted in spindle head of micro drilling machine tool. Mech. Based Des. Struct. Mach. 2022, 1–21. [Google Scholar] [CrossRef]
- Lv, B.; Lin, B.; Cao, Z.; Li, B.; Wang, G. A parallel 3-DOF micro-nano motion stage for vibration-assisted milling. Mech. Mach. Theory 2022, 173, 104854. [Google Scholar] [CrossRef]
- Gandhi, P.; Bhole, K. 3D Microfabrication Using Bulk Lithography. In Proceedings of the ASME 2011 International Mechanical Engineering Congress and Exposition, Denver, CO, USA, 11–17 November 2011; pp. 393–399. [Google Scholar]
- Gandhi, P.; Deshmukh, S.; Ramtekkar, R.; Bhole, K.; Baraki, A. “On-Axis” Linear Focused Spot Scanning Microstereolithography System: Optomechatronic Design, Analysis and Development. J. Adv. Manuf. Syst. 2013, 12, 43–68. [Google Scholar] [CrossRef]
- Tanikawa, T.; Arai, T.; Koyachi, N. Development of small-sized 3 DOF finger module in micro hand for micro manipulation. In Proceedings of the 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems, Kyongju, Korea, 17–21 October 1999; pp. 876–881. [Google Scholar]
- Tanikawa, T.; Ukiana, M.; Morita, K.; Koseki, Y.; Ohba, K.; Fujii, K.; Arai, T. Design of 3-DOF parallel mechanism with thin plate for micro finger module in micro manipulation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; pp. 1778–1783. [Google Scholar]
- Yi, B.-J.; Chung, G.B.; Na, H.Y.; Kim, W.K.; Suh, I.H. Design and experiment of a 3-DOF parallel micromechanism utilizing flexure hinges. IEEE Trans. Robot. Autom. 2003, 19, 604–612. [Google Scholar] [CrossRef]
- Pham, H.-H.; Chen, I.-M.; Yeh, H.-C. Micro-motion selective-actuation XYZ flexure parallel mechanism: Design and modeling. J. Micromechatronics 2003, 3, 51–73. [Google Scholar] [CrossRef]
- Lu, T.-F.; Handley, D.C.; Yong, Y.K.; Eales, C. A three-DOF compliant micromotion stage with flexure hinges. Ind. Robot. Int. J. 2004, 31, 355–361. [Google Scholar] [CrossRef] [Green Version]
- Chao, D.; Zong, G.; Liu, R. Design of a 6-DOF compliant manipulator based on serial-parallel architecture. In Proceedings of the 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Monterey, CA, USA, 24–28 July 2005; pp. 765–770. [Google Scholar]
- Pham, H.-H.; Chen, I.M. Stiffness modeling of flexure parallel mechanism. Precis. Eng. 2005, 29, 467–478. [Google Scholar] [CrossRef]
- Choi, Y.-J.; Sreenivasan, S.V.; Choi, B.J. Kinematic design of large displacement precision XY positioning stage by using cross strip flexure joints and over-constrained mechanism. Mech. Mach. Theory 2008, 43, 724–737. [Google Scholar] [CrossRef]
- Yao, Q.; Dong, J.; Ferreira, P.M. A novel parallel-kinematics mechanisms for integrated, multi-axis nanopositioning: Part 1. Kinematics and design for fabrication. Precis. Eng. 2008, 32, 7–19. [Google Scholar] [CrossRef]
- Dong, J.; Yao, Q.; Ferreira, P.M. A novel parallel-kinematics mechanism for integrated, multi-axis nanopositioning: Part 2: Dynamics, control and performance analysis. Precis. Eng. 2008, 32, 20–33. [Google Scholar] [CrossRef]
- Dong, W.; Sun, L.; Du, Z. Stiffness research on a high-precision, large-workspace parallel mechanism with compliant joints. Precis. Eng. 2008, 32, 222–231. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, X. Input coupling analysis and optimal design of a 3-DOF compliant micro-positioning stage. Mech. Mach. Theory 2008, 43, 400–410. [Google Scholar] [CrossRef]
- Wu, T.L.; Chen, J.H.; Chang, S.H. A six-DOF prismatic-spherical-spherical parallel compliant nanopositioner. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2008, 55, 2544–2551. [Google Scholar] [CrossRef] [PubMed]
- Yong, Y.K.; Lu, T.-F. Kinetostatic modeling of 3-RRR compliant micro-motion stages with flexure hinges. Mech. Mach. Theory 2009, 44, 1156–1175. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Q. A Totally Decoupled Piezo-Driven XYZ Flexure Parallel Micropositioning Stage for Micro/Nanomanipulation. IEEE Trans. Autom. Sci. Eng. 2011, 8, 265–279. [Google Scholar] [CrossRef]
- Liang, Q.; Zhang, D.; Chi, Z.; Song, Q.; Ge, Y.; Ge, Y. Six-DOF micro-manipulator based on compliant parallel mechanism with integrated force sensor. Robot. Comput.-Integr. Manuf. 2011, 27, 124–134. [Google Scholar] [CrossRef]
- Yang, G.; Teo, T.J.; Chen, I.M.; Lin, W. Analysis and design of a 3-DOF flexure-based zero-torsion parallel manipulator for nano-alignment applications. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 2751–2756. [Google Scholar]
- Yun, Y.; Li, Y. Optimal design of a 3-PUPU parallel robot with compliant hinges for micromanipulation in a cubic workspace. Robot. Comput.-Integr. Manuf. 2011, 27, 977–985. [Google Scholar] [CrossRef]
- Li, Y.; Huang, J.; Tang, H. A Compliant Parallel XY Micromotion Stage with Complete Kinematic Decoupling. IEEE Trans. Autom. Sci. Eng. 2012, 9, 538–553. [Google Scholar] [CrossRef]
- Kim, H.-Y.; Ahn, D.-H.; Gweon, D.-G. Development of a novel 3-degrees of freedom flexure based positioning system. Rev. Sci. Instrum. 2012, 83, 055114. [Google Scholar] [CrossRef]
- Xiao, S.; Li, Y. Optimal Design, Fabrication, and Control of an XY Micropositioning Stage Driven by Electromagnetic Actuators. IEEE Trans. Ind. Electron. 2013, 60, 4613–4626. [Google Scholar] [CrossRef]
- Bhagat, U.; Shirinzadeh, B.; Clark, L.; Chea, P.; Qin, Y.; Tian, Y.; Zhang, D. Design and analysis of a novel flexure-based 3-DOF mechanism. Mech. Mach. Theory 2014, 74, 173–187. [Google Scholar] [CrossRef]
- Clark, L.; Shirinzadeh, B.; Zhong, Y.; Tian, Y.; Zhang, D. Design and analysis of a compact flexure-based precision pure rotation stage without actuator redundancy. Mech. Mach. Theory 2016, 105, 129–144. [Google Scholar] [CrossRef]
- Hao, G.; Yu, J. Design, modelling and analysis of a completely-decoupled XY compliant parallel manipulator. Mech. Mach. Theory 2016, 102, 179–195. [Google Scholar] [CrossRef]
- Li, Y.; Wu, Z. Design, analysis and simulation of a novel 3-DOF translational micromanipulator based on the PRB model. Mech. Mach. Theory 2016, 100, 235–258. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, X. A planar 3-DOF nanopositioning platform with large magnification. Precis. Eng. 2016, 46, 221–231. [Google Scholar] [CrossRef] [Green Version]
- Culpepper, M.L.; Anderson, G. Design of a low-cost nano-manipulator which utilizes a monolithic, spatial compliant mechanism. Precis. Eng. 2004, 28, 469–482. [Google Scholar] [CrossRef]
- Chen, S.-C.; Culpepper, M.L. Design of a six-axis micro-scale nanopositioner—μHexFlex. Precis. Eng. 2006, 30, 314–324. [Google Scholar] [CrossRef]
- Awtar, S.; Slocum, A.H. Constraint-Based Design of Parallel Kinematic XY Flexure Mechanisms. J. Mech. Des. 2006, 129, 816–830. [Google Scholar] [CrossRef]
- Hopkins, J.B.; Culpepper, M.L. Synthesis of multi-degree of freedom, parallel flexure system concepts via Freedom and Constraint Topology (FACT)—Part I: Principles. Precis. Eng. 2010, 34, 259–270. [Google Scholar] [CrossRef]
- Hopkins, J.B.; Culpepper, M.L. Synthesis of multi-degree of freedom, parallel flexure system concepts via freedom and constraint topology (FACT). Part II: Practice. Precis. Eng. 2010, 34, 271–278. [Google Scholar] [CrossRef]
- Hopkins, J.B.; Culpepper, M.L. Synthesis of precision serial flexure systems using freedom and constraint topologies (FACT). Precis. Eng. 2011, 35, 638–649. [Google Scholar] [CrossRef]
- Awtar, S.; Ustick, J.; Sen, S. An XYZ Parallel-Kinematic Flexure Mechanism with Geometrically Decoupled Degrees of Freedom. J. Mech. Robot. 2012, 5, 015001. [Google Scholar] [CrossRef]
- Hopkins, J.B.; Panas, R.M. Design of flexure-based precision transmission mechanisms using screw theory. Precis. Eng. 2013, 37, 299–307. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Hao, G. A constraint and position identification (CPI) approach for the synthesis of decoupled spatial translational compliant parallel manipulators. Mech. Mach. Theory 2015, 90, 59–83. [Google Scholar] [CrossRef]
- Li, H.; Hao, G.; Kavanagh, R. A New XYZ Compliant Parallel Mechanism for Micro-/Nano-Manipulation: Design and Analysis. Micromachines 2016, 7, 23. [Google Scholar] [CrossRef] [Green Version]
- Hao, G. Design and analysis of symmetric and compact 2R1T (in-plane 3-DOC) flexure parallel mechanisms. Mech. Sci. 2017, 8, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Lum, G.Z.; Teo, T.J.; Yeo, S.H.; Yang, G.; Sitti, M. Structural optimization for flexure-based parallel mechanisms—Towards achieving optimal dynamic and stiffness properties. Precis. Eng. 2015, 42, 195–207. [Google Scholar] [CrossRef]
- Jin, M.; Zhang, X. A new topology optimization method for planar compliant parallel mechanisms. Mech. Mach. Theory 2016, 95, 42–58. [Google Scholar] [CrossRef]
- Lum, G.Z.; Pham, M.T.; Teo, T.J.; Yang, G.; Yeo, S.H.; Sitti, M. An XY & thetaZ flexure mechanism with optimal stiffness properties. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; pp. 1103–1110. [Google Scholar]
- Pham, M.T.; Yeo, S.H.; Teo, T.J.; Wang, P.; Nai, M.L.S. A Decoupled 6-DOF Compliant Parallel Mechanism with Optimized Dynamic Characteristics Using Cellular Structure. Machines 2021, 9, 5. [Google Scholar] [CrossRef]
- Lobontiu, N. Compliant Mechanisms: Design of Flexure Hinges; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Akbari, S.; Pirbodaghi, T. Precision positioning using a novel six axes compliant nano-manipulator. Microsyst. Technol. 2017, 23, 2499–2507. [Google Scholar] [CrossRef] [Green Version]
- de Jong, B.R.; Brouwer, D.M.; de Boer, M.J.; Jansen, H.V.; Soemers, H.M.; Krijnen, G.J. Design and Fabrication of a Planar Three-DOFs MEMS-Based Manipulator. J. Microelectromech. Syst. 2010, 19, 1116–1130. [Google Scholar] [CrossRef] [Green Version]
- Mukhopadhyay, D.; Dong, J.; Pengwang, E.; Ferreira, P. A SOI-MEMS-based 3-DOF planar parallel-kinematics nanopositioning stage. Sens. Actuators A Phys. 2008, 147, 340–351. [Google Scholar] [CrossRef]
- Lee, K.M.; Arjunan, S. A three-degrees-of-freedom micromotion in-parallel actuated manipulator. IEEE Trans. Robot. Autom. 1991, 7, 634–641. [Google Scholar] [CrossRef]
- Teo, T.J. Flexure-Based Electromagnetic Parallel-Kinematics Manipulator System. Ph.D. Thesis, Nanyang Technological University, Singapore, 2009. [Google Scholar]
- Pham, M.T. Design and 3D Printing of Compliant Mechanisms. Ph.D. Thesis, Nanyang Technological University, Singapore, 2019. [Google Scholar]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pham, M.T.; Yeo, S.H.; Teo, T.J. Three-Legged Compliant Parallel Mechanisms: Fundamental Design Criteria to Achieve Fully Decoupled Motion Characteristics and a State-of-the-Art Review. Mathematics 2022, 10, 1414. https://doi.org/10.3390/math10091414
Pham MT, Yeo SH, Teo TJ. Three-Legged Compliant Parallel Mechanisms: Fundamental Design Criteria to Achieve Fully Decoupled Motion Characteristics and a State-of-the-Art Review. Mathematics. 2022; 10(9):1414. https://doi.org/10.3390/math10091414
Chicago/Turabian StylePham, Minh Tuan, Song Huat Yeo, and Tat Joo Teo. 2022. "Three-Legged Compliant Parallel Mechanisms: Fundamental Design Criteria to Achieve Fully Decoupled Motion Characteristics and a State-of-the-Art Review" Mathematics 10, no. 9: 1414. https://doi.org/10.3390/math10091414
APA StylePham, M. T., Yeo, S. H., & Teo, T. J. (2022). Three-Legged Compliant Parallel Mechanisms: Fundamental Design Criteria to Achieve Fully Decoupled Motion Characteristics and a State-of-the-Art Review. Mathematics, 10(9), 1414. https://doi.org/10.3390/math10091414