
A Novel Data-Driven Feature Extraction Strategy and Its Application in Looseness Detection of Rotor-Bearing System


Abstract
:1. Introduction
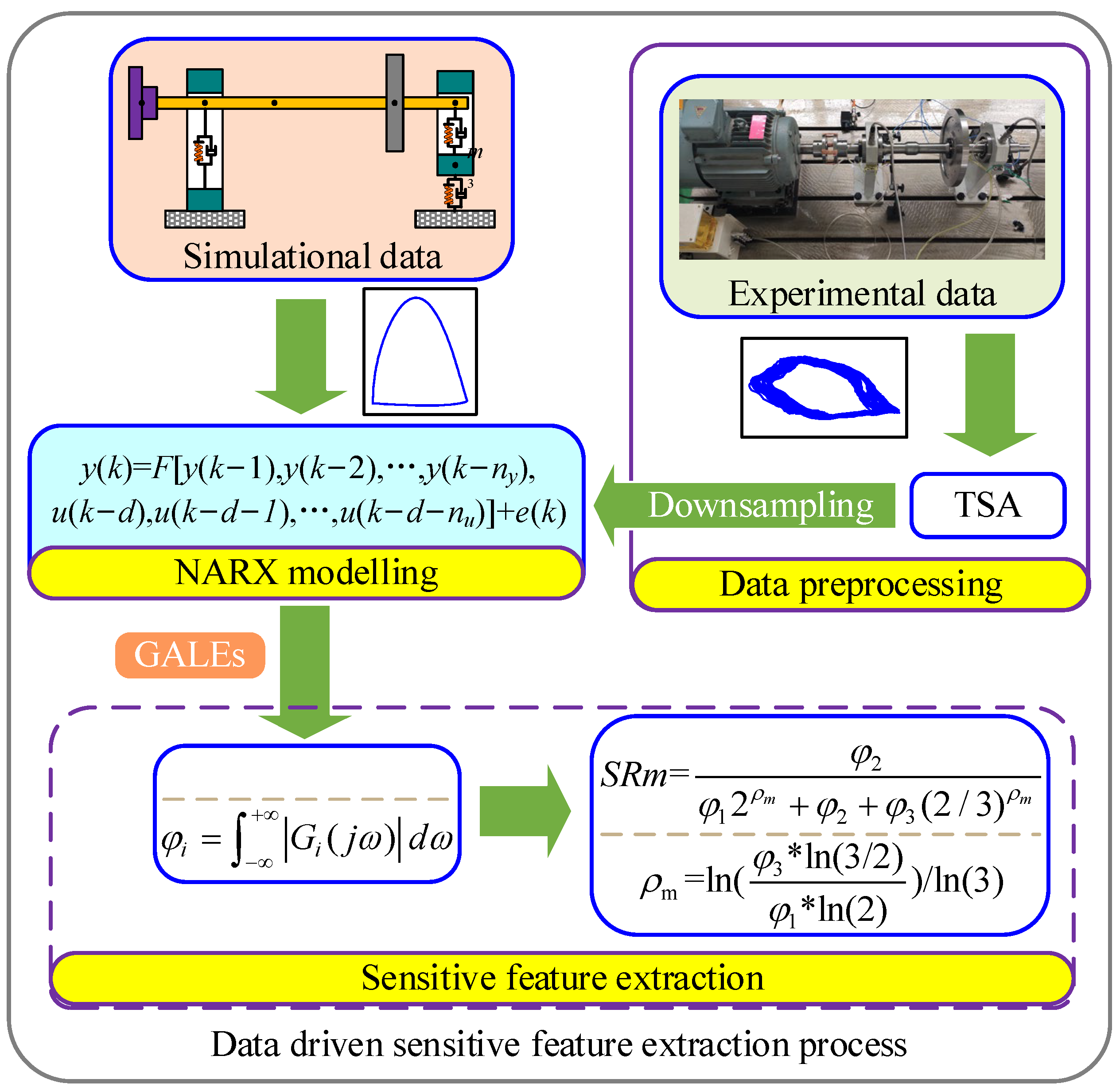
2. Data-Driven Feature Extraction
3. Data-Driven Feature Extraction of Pedestal Looseness in Rotor-Bearing System
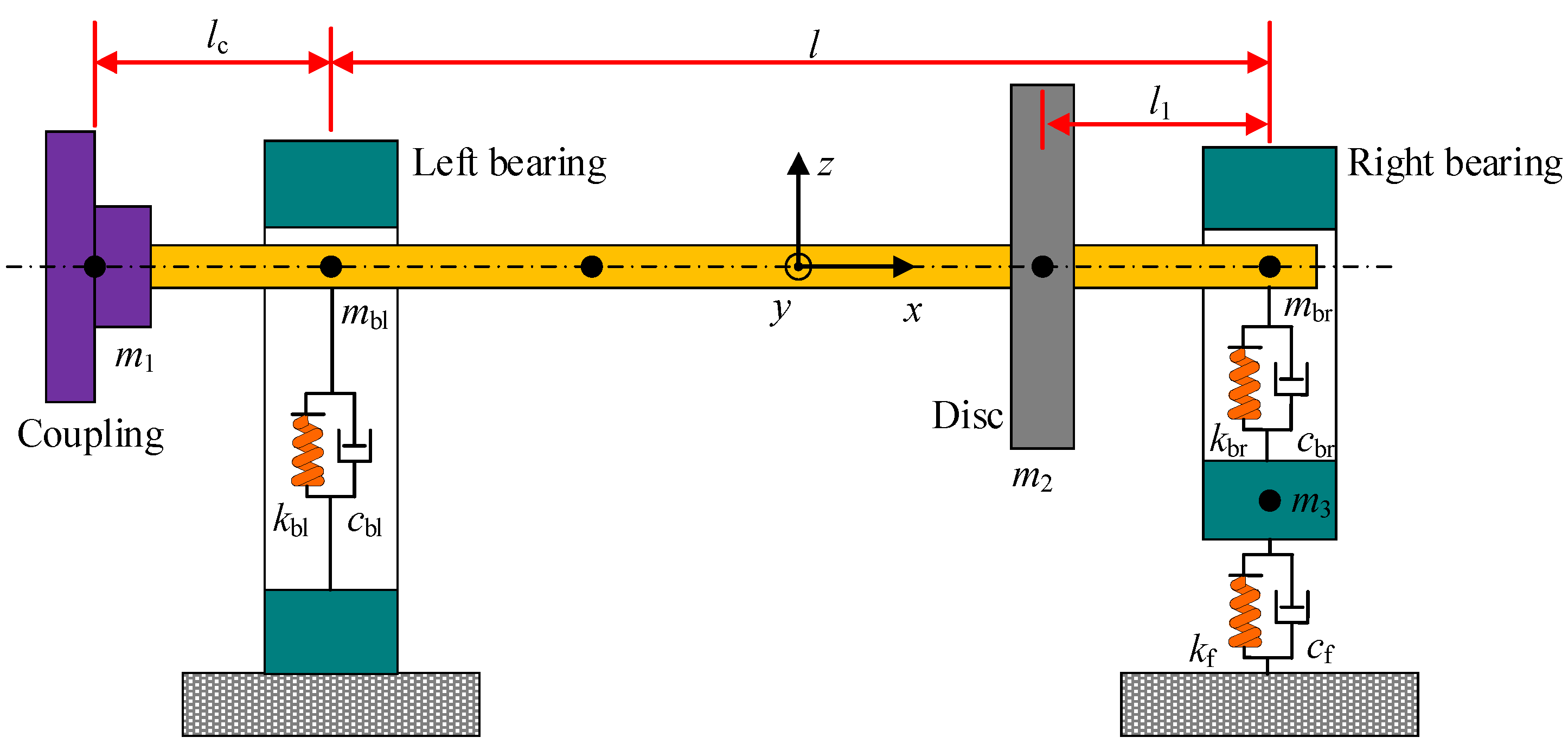
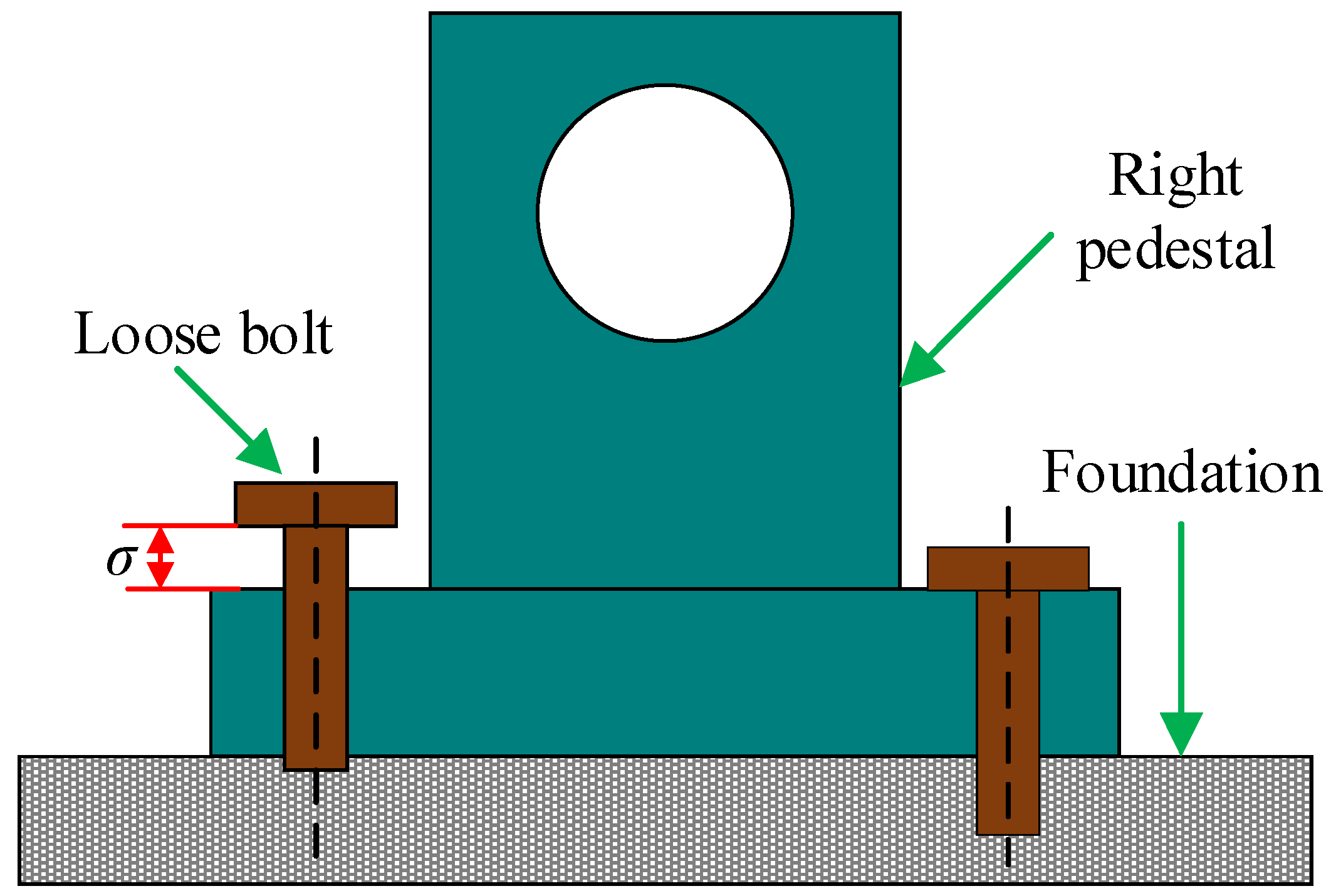
3.1. Dynamic Modelling of a Rotor-Bearing System with Pedestal Looseness
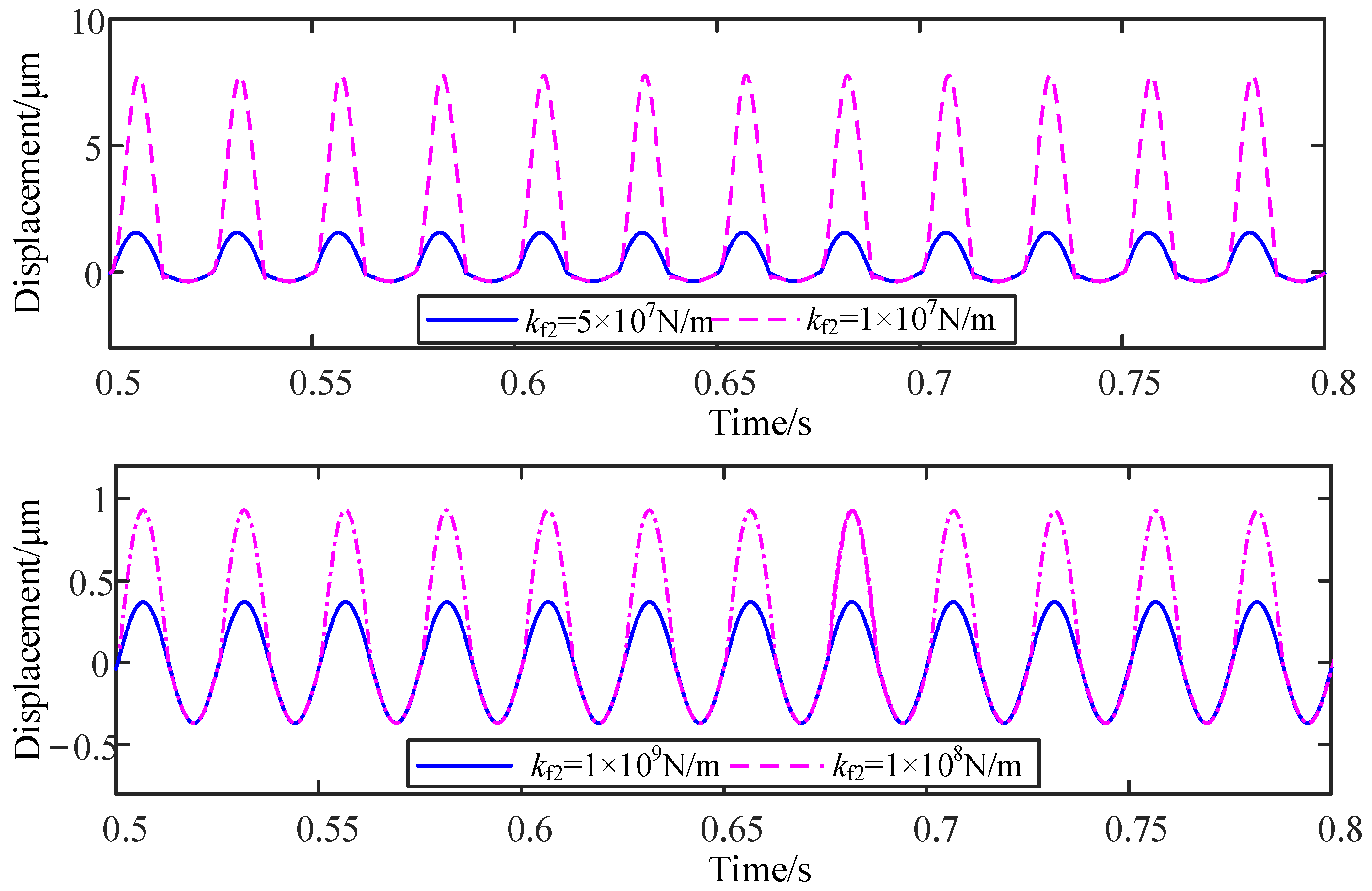
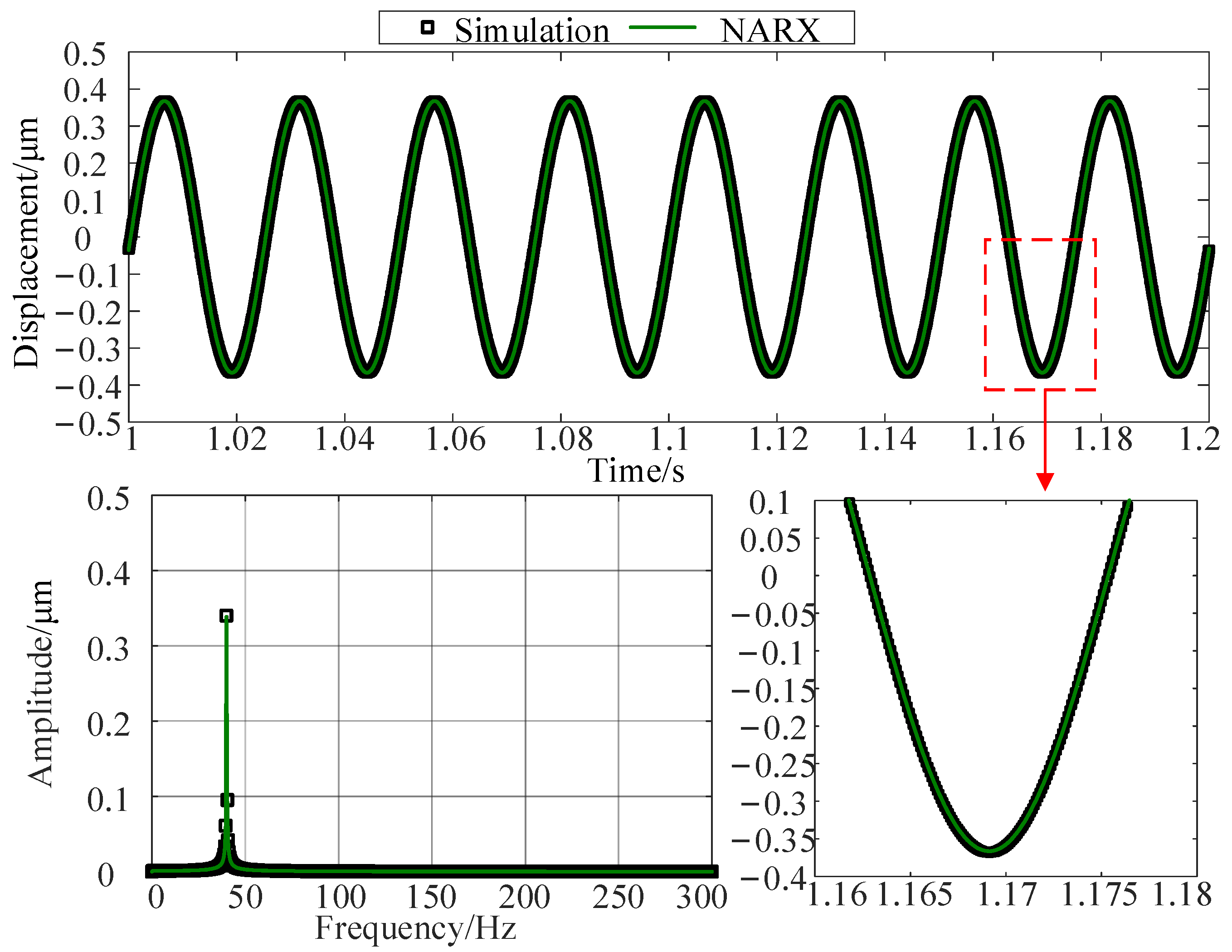
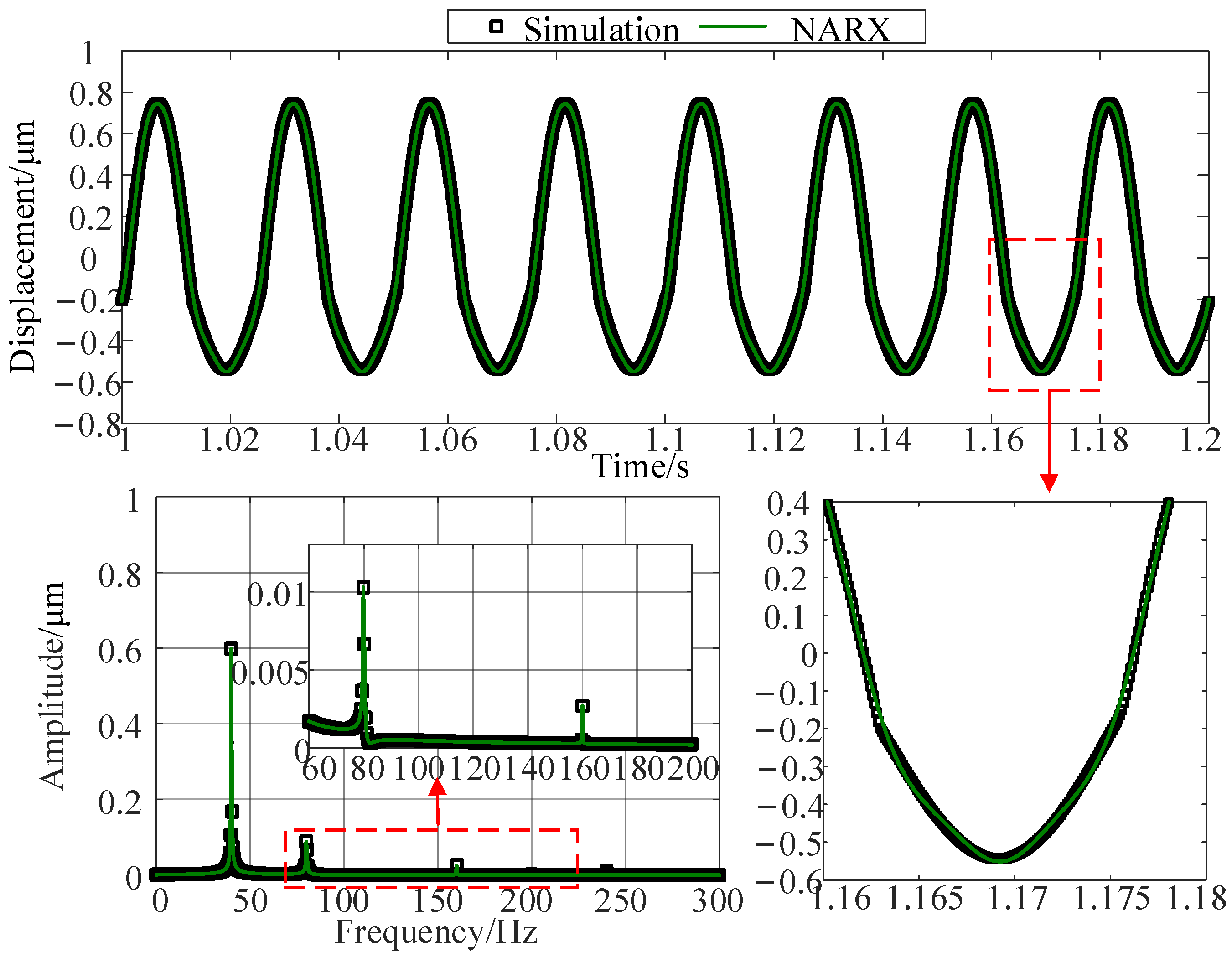
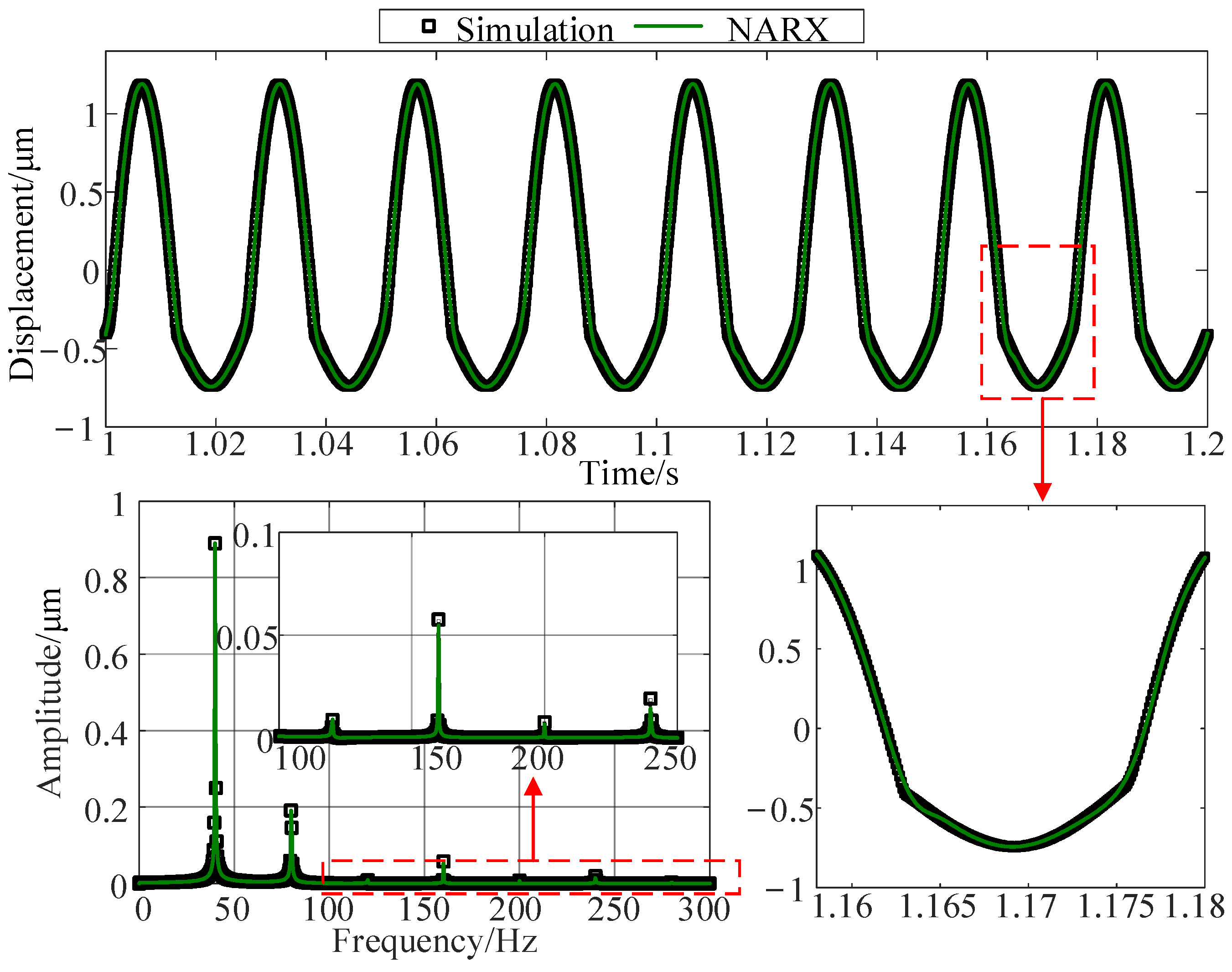
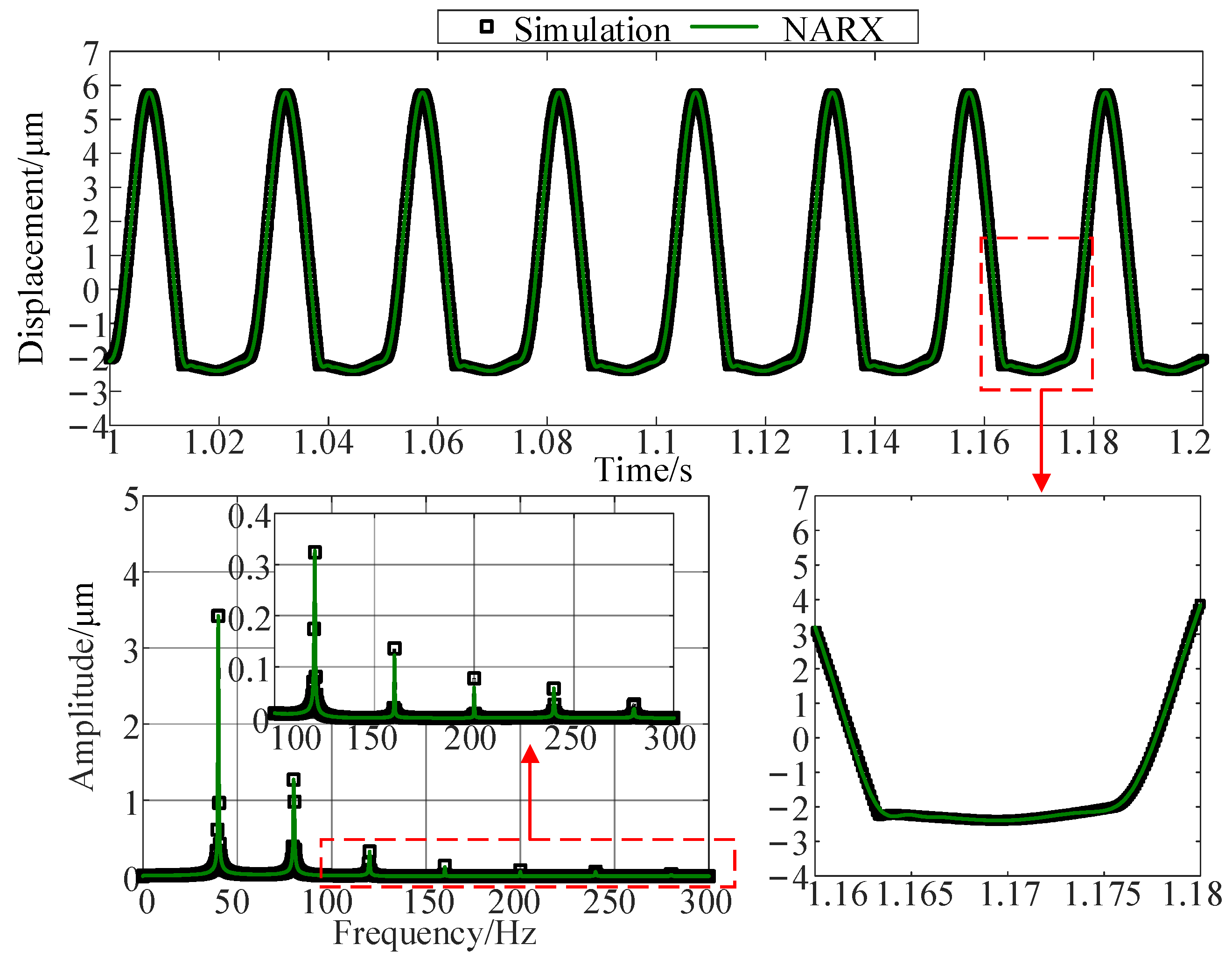
3.2. Influence of Looseness Stiffness on Vibration Response
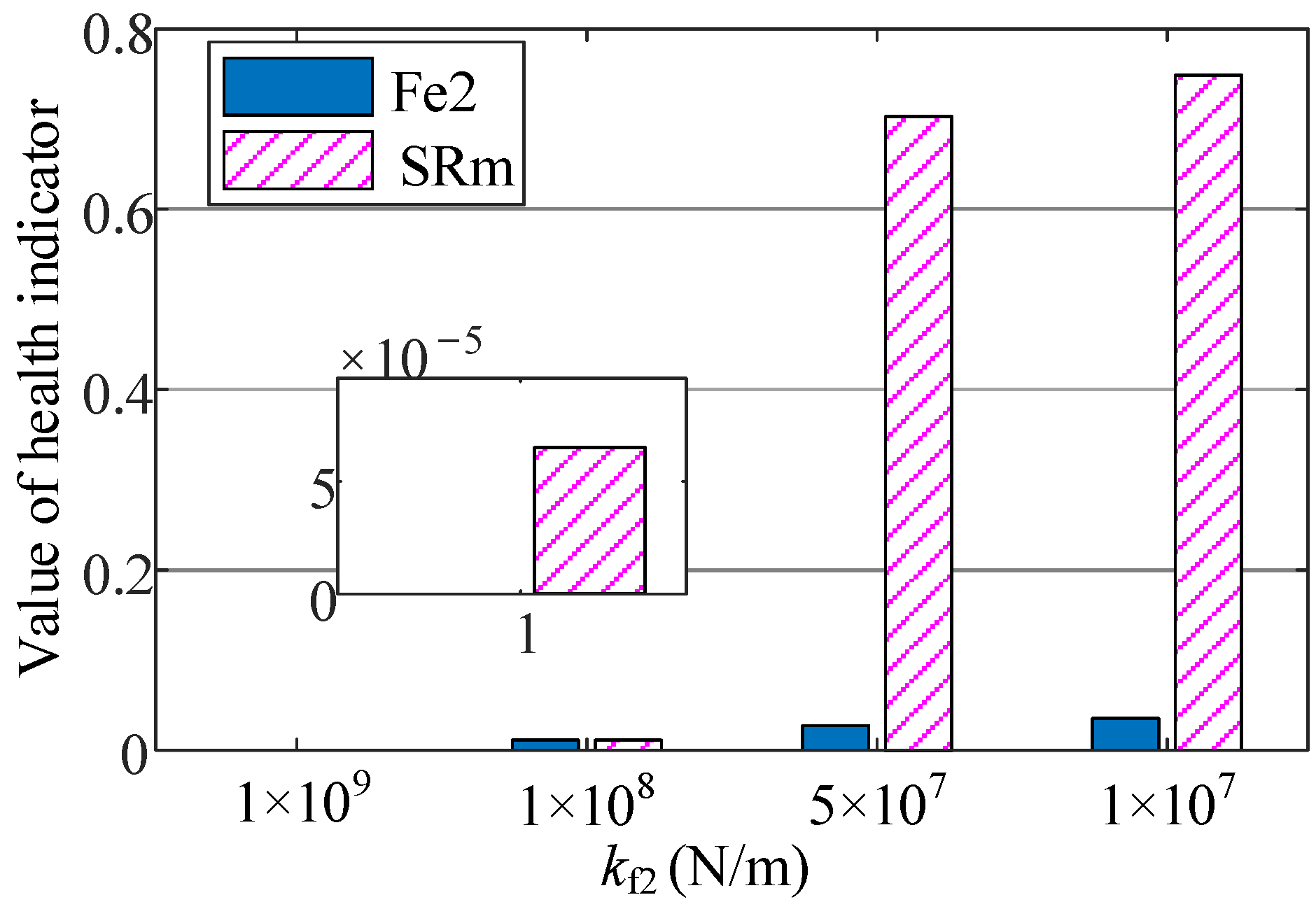
3.3. Data-Driven Fault Feature Extraction
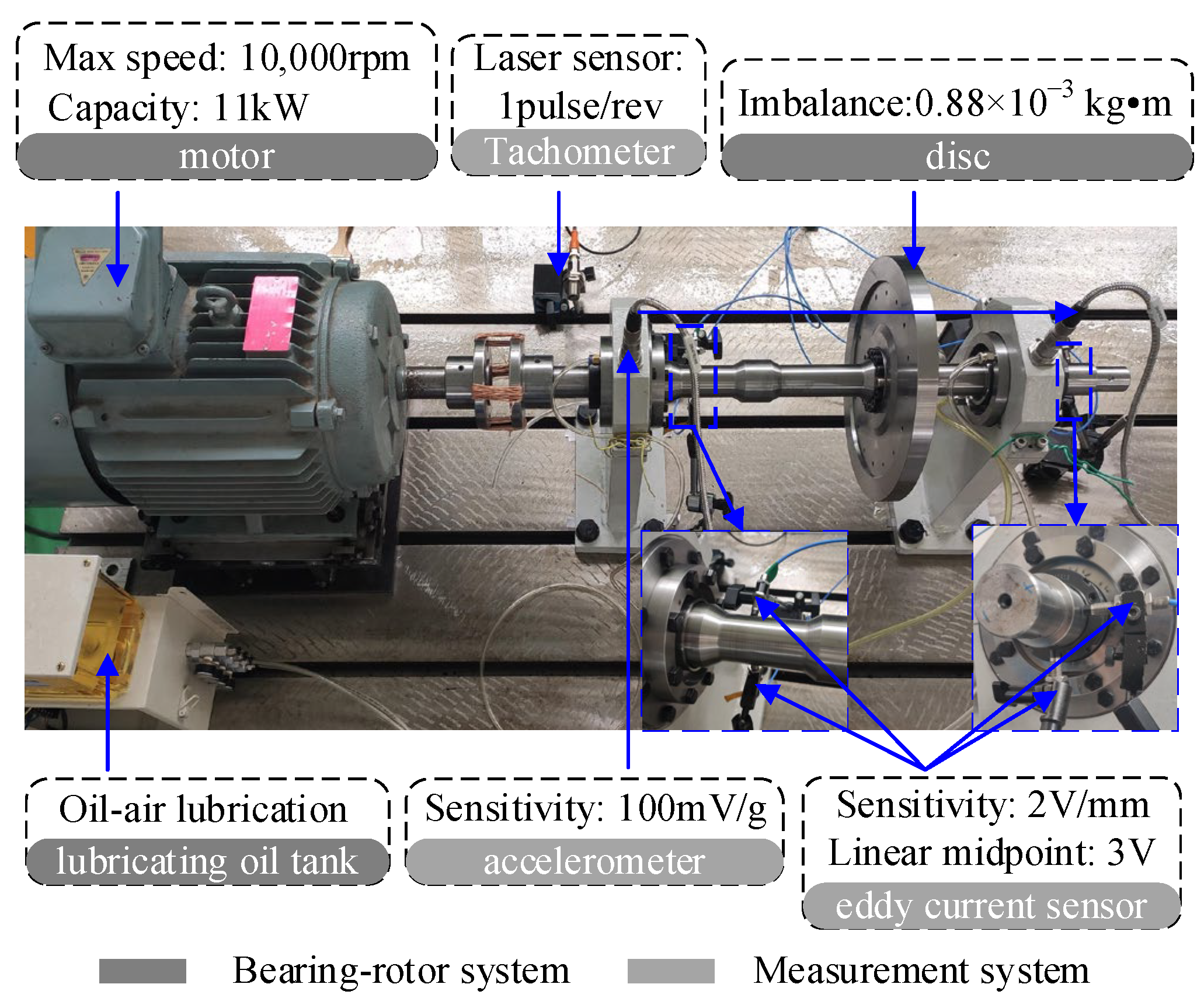
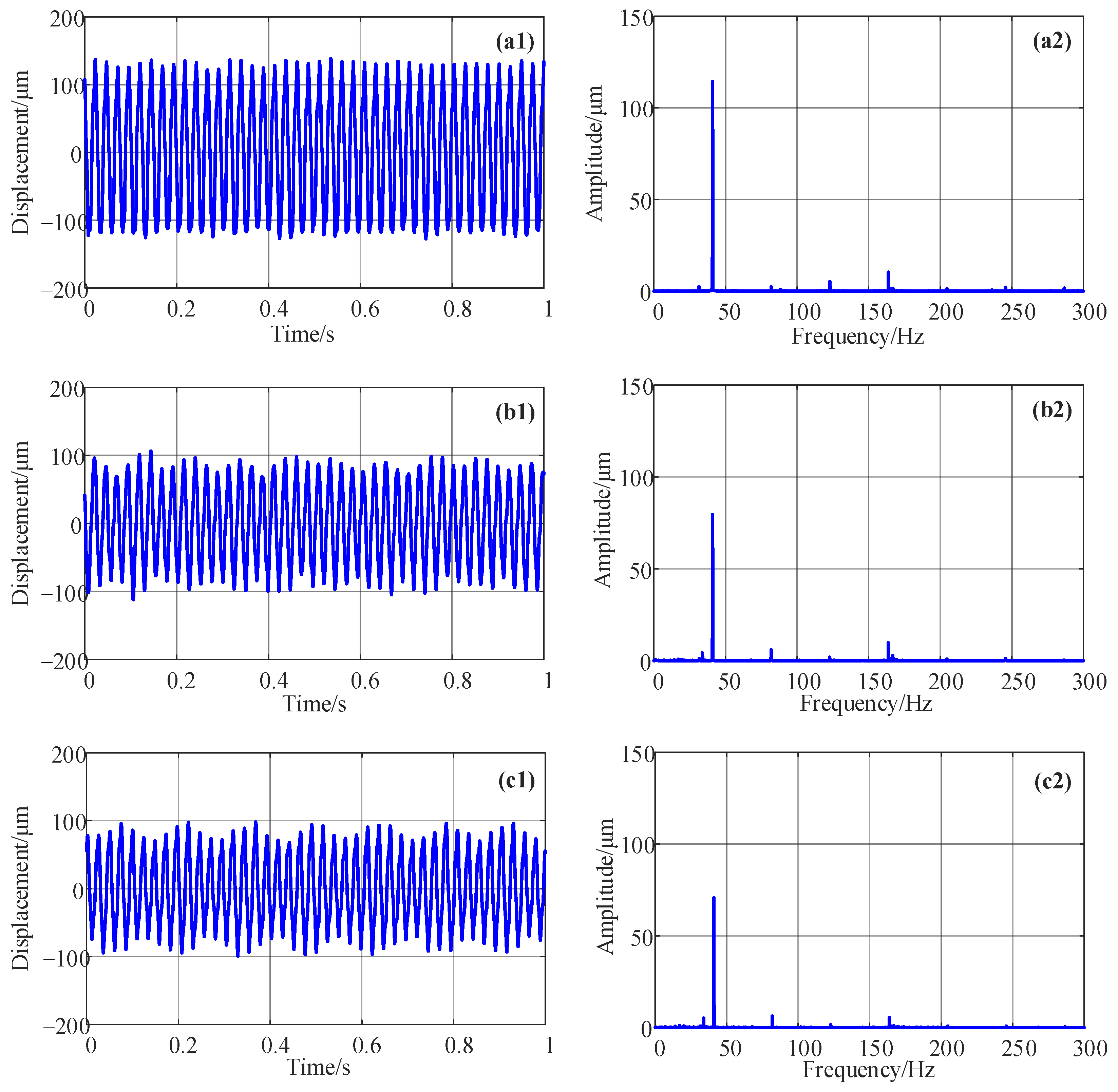
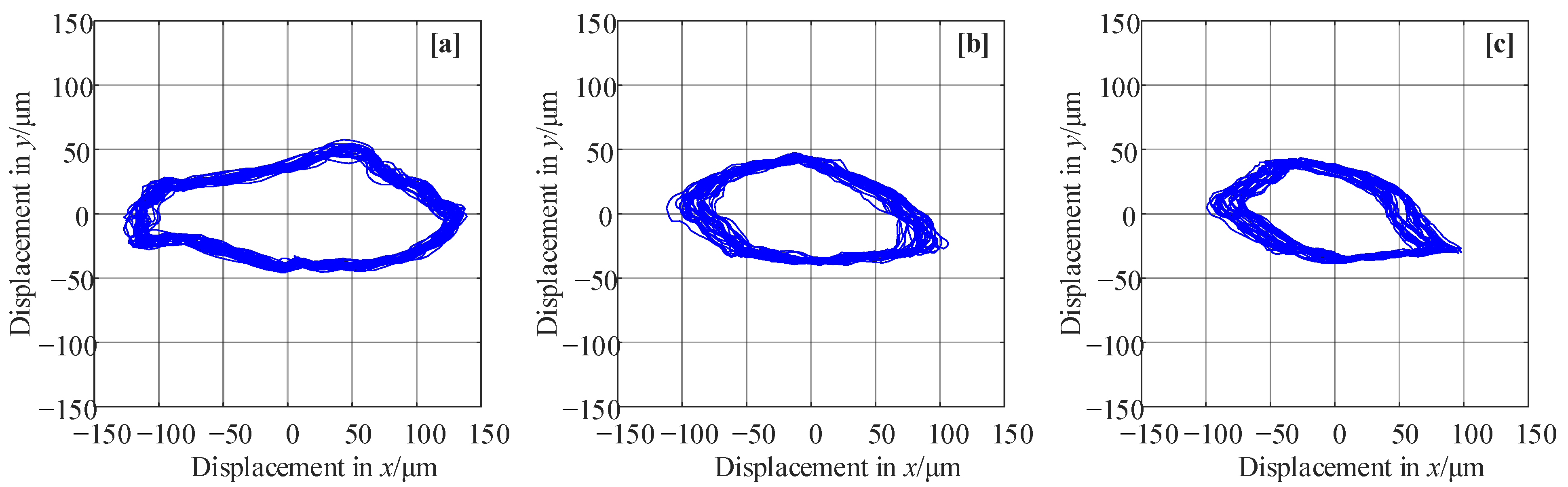
4. Experimental Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chu, F.; Tang, Y. Stability and non-linear responses of a rotor-bearing system with pedestal looseness. J. Sound Vib. 2001, 241, 879–893. [Google Scholar] [CrossRef]
- Yang, Y.; Ouyang, H.; Yang, Y.; Cao, D.; Wang, K. Vibration analysis of a dual-rotor-bearing-double casing system with pedestal looseness and multi-stage turbine blade-casing rub. Mech. Syst. Signal Process. 2020, 143, 106845. [Google Scholar] [CrossRef]
- Muszynska, A.; Goldman, P. Chaotic responses of unbalanced rotor/bearing/stator systems with looseness or rubs. Chaos Soliton. Fract. 1995, 5, 1683–1704. [Google Scholar] [CrossRef]
- Jiang, M.; Wu, J.; Peng, X.; Li, X. Nonlinearity measure based assessment method for pedestal looseness of bearing-rotor systems. J. Sound Vib. 2017, 411, 232–246. [Google Scholar] [CrossRef]
- Zhang, H.; Lu, K.; Zhang, W.; Fu, C. Investigation on dynamic behaviors of rotor system with looseness and nonlinear supporting. Mech. Syst. Signal Process. 2022, 166, 108400. [Google Scholar] [CrossRef]
- Ma, H.; Zhao, X.; Teng, Y.; Wen, B. Analysis of dynamic characteristics for a rotor system with pedestal looseness. Shock. Vib. 2011, 18, 13–27. [Google Scholar] [CrossRef]
- Lu, K.; Jin, Y.; Chen, Y.; Cao, Q.; Zhang, Z. Stability analysis of reduced rotor pedestal looseness fault model. Nonlinear Dyn. 2015, 82, 1611–1622. [Google Scholar] [CrossRef]
- Yang, Y.; Yang, Y.; Cao, D.; Chen, G.; Jin, Y. Response evaluation of imbalance-rub-pedestal looseness coupling fault on a geometrically nonlinear rotor system. Mech. Syst. Signal Process. 2019, 118, 423–442. [Google Scholar] [CrossRef]
- An, X.; Jiang, D.; Li, S.; Zhao, M. Application of the ensemble empirical mode decomposition and Hilbert transform to pedestal looseness study of direct-drive wind turbine. Energy 2011, 36, 5508–5520. [Google Scholar] [CrossRef]
- An, X.; Zhang, F. Pedestal looseness fault diagnosis in a rotating machine based on variational mode decomposition. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 231, 2493–2502. [Google Scholar] [CrossRef]
- Lee, S.M.; Choi, Y.S. Fault diagnosis of partial rub and looseness in rotating machinery using Hilbert-Huang transform. J. Mech. Sci. Technol. 2008, 22, 2151–2162. [Google Scholar] [CrossRef]
- Billings, S.A. Nonlinear System Identification: NARMAX Methods in the Time, Frequency, and Spatio-Temporal Domains; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Junsheng, C.; Dejie, Y.; Yu, Y. A fault diagnosis approach for roller bearings based on EMD method and AR model. Mech. Syst. Signal Process. 2006, 20, 350–362. [Google Scholar] [CrossRef]
- McLeod, A.I.; Li, W.K. Diagnostic checking ARMA time series models using squared-residual autocorrelations. J. Time Ser. Anal. 1983, 4, 269–273. [Google Scholar] [CrossRef]
- Doyle III, F.J.; Ogunnaike, B.A.; Pearson, R.K. Nonlinear model-based control using second-order Volterra models. Automatica 1995, 31, 697–714. [Google Scholar] [CrossRef]
- Ding, F.; Liu, X.P.; Liu, G. Identification methods for Hammerstein nonlinear systems. Digit. Signal Process. 2011, 21, 215–238. [Google Scholar] [CrossRef]
- Chen, S.; Billings, S.A. Representations of non-linear systems: The NARMAX model. Int. J. Control 1989, 49, 1013–1032. [Google Scholar] [CrossRef]
- Karami, K.; Westwick, D.; Schoukens, J. Applying polynomial decoupling methods to the polynomial NARX model. Mech. Syst. Signal Process. 2021, 148, 107134. [Google Scholar] [CrossRef]
- Zhang, S.; Lang, Z.Q. SCADA-data-based wind turbine fault detection: A dynamic model sensor method. Control Eng. Pract. 2020, 102, 104546. [Google Scholar] [CrossRef]
- Zhu, Y.P.; Lang, Z.Q.; Mao, H.L.; Laalej, H. Nonlinear output frequency response functions: A new evaluation approach and applications to railway and manufacturing systems’ condition monitoring. Mech. Syst. Signal Process. 2022, 163, 108179. [Google Scholar] [CrossRef]
- Li, Y.; Luo, Z.; He, F.; Zhu, Y.; Ge, X. Modeling of rotating machinery: A novel frequency sweep system identification approach. J. Sound Vib. 2021, 494, 115882. [Google Scholar] [CrossRef]
- Lang, Z.Q.; Billings, S.A.; Yue, R.; Li, J. Output frequency response function of nonlinear Volterra systems. Automatica 2007, 43, 805–816. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, Y.L.; Li, J.T.; Ma, H.; Yang, Q.; Yan, X.X. Application of weighted contribution rate of nonlinear output frequency response functions to rotor rub-impact. Mech. Syst. Signal Process. 2020, 136, 106518. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhu, Y.P.; Han, Q.; Liu, Y. The evaluation of Nonlinear Output Frequency Response Functions based on tailored data-driven modelling for rotor condition monitoring. Mech. Syst. Signal Process. 2023, 197, 110409. [Google Scholar] [CrossRef]
- Peng, Z.K.; Lang, Z.Q.; Wolters, C.; Billings, S.A.; Worden, K. Feasibility study of structural damage detection using NARMAX modelling and nonlinear output frequency response function based analysis. Mech. Syst. Signal Process. 2011, 25, 1045–1061. [Google Scholar] [CrossRef]
- Lin, J.; Zhao, Y.; Wang, P.; Wang, Y.; Han, Q.; Ma, H. Nonlinear Responses of a Rotor-Bearing-Seal System with Pedestal Looseness. Shock. Vib. 2021, 2021, 9937700. [Google Scholar] [CrossRef]
- Choi, S.K.; Noah, S.T. Response and stability analysis of piecewise-linear oscillators under multi-forcing frequencies. Nonlinear Dyn. 1992, 3, 105–121. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Shaft diameter at left bearing/mm | 55 |
| Shaft diameter at disc/mm | 55 |
| The span between two bearings l/mm | 800 |
| Coupling cantilever length lc/mm | 165 |
| The span between the right bearing and disc l/mm | 164.5 |
| Elastic modulus of shaft E/Pa | 2.07 × 1011 |
| Poisson’s ratio υ | 0.3 |
| Density ρ/kg/m3 | 7850 |
| Horizontal and vertical stiffness of left bearing kbl/N/m | 1 × 107 |
| Horizontal and vertical damping of left bearing cbl/N·s/m | 1 × 104 |
| Horizontal and vertical stiffness of right bearing kbr/N/m | 2 × 108 |
| Horizontal and vertical damping of right bearing cbl/N·s/m | 2 × 105 |
| No. | kf2 = 1 × 109 N/m | kf2 = 1 × 108 N/m | kf2 = 5 × 107 N/m | kf2 = 1 × 107 N/m |
|---|---|---|---|---|
| 1 | u(k − 4) [−1.81 × 10−6] | y(k − 1) [2.91] | y(k − 1) [2.84] | y(k − 1) [2.71] |
| 2 | u(k − 3) [5.21 × 10−6] | y(k − 2) [−3.77] | y(k − 2) [−3.57] | y(k − 2) [−3.37] |
| 3 | y(k − 1) [2.77] | y(k − 3) [3.27] | y(k − 3) [3.00] | y(k − 3) [2.91] |
| 4 | y(k − 2) [−2.09] | y(k − 4) [−2.31] | y(k − 4) [−2.05] | y(k − 4) [−2.09] |
| 5 | y(k − 3) [−5.32] | y(k − 5) [1.21] | y(k − 5) [9.76 × 10−1] | y(k − 5) [1.13] |
| 6 | u(k − 6) [−3.89 × 10−6] | y(k − 6) [−3.29] | y(k − 6) [−2.22 × 10−1] | y(k − 6) [−3.28] |
| 7 | y(k − 6) [−3.71 × 10−1] | u(k − 1) [1.83 × 10−2] | u(k − 1) [3.11 × 10−4] | u(k − 6) [2.33 × 10−3] |
| 8 | y(k − 5) [8.29 × 10−1] | u3(k − 1) u(k − 5) [3.78 × 10−9] | u3(k − 1)u(k − 6) [4.87 × 10−10] | u3(k − 6) [1.02 × 10−6] |
| 9 | [9.36 × 10−8] | [−3.01 × 10−3] | [−6.12 × 10−3] | [−6.58 × 10−2] |
| 10 | u(k − 2) [3.39 × 10−6] | u(k − 1)u(k − 2) [−1.31 × 10−5] | u(k − 1)u(k − 2) [4.42 × 10−6] | u(k − 1)u(k − 2)y(k − 1) [−1.91 × 10−5] |
| 11 | y(k − 4) [8.60 × 10−2] | u(k − 6) [7.26 × 10−2] | u3(k − 1) [1.46 × 10−7] | u2 (k − 6) [3.83 × 10−4] |
| 12 | u(k − 5) [−1.11 × 10−6] | u(k − 1)u(k − 3) [1.60 × 10−5] | u2(k − 1) y(k − 1) [−1.71 × 10−5] | u2(k − 5) [−3.73 × 10−4] |
| 13 | u(k − 1) [8.14 × 10−7] | u(k − 1)u2(k − 2)u(k − 4) [−4.14 × 10−9] | u(k − 1)u(k − 4)y(k − 2) [1.28 × 10−5] | u3(k − 1)y(k − 1) [1.67 × 10−7] |
| 14 | y3(k − 6) [−8.43 × 10−9] | u(k − 5) [−9.05 × 10−2] | u(k − 6)y2(k − 1) [−2.13 × 10−4] | u(k − 1)y(k − 1) [3.30 × 10−4] |
| No. | Normal | Weak | Serious |
|---|---|---|---|
| 1 | u(k − 1) [−3.58] | y(k − 1) [1.17] | u(k − 6) [−1.51 × 10−1] |
| 2 | y(k − 4) [5.24 × 10−2] | y(k − 2) [−3.58 × 10−1] | y(k − 1) [9.21 × 10−1] |
| 3 | y(k − 1) [5.96 × 10−1] | u(k − 1) [−5.61 × 10−1] | y(k − 2) [2.14 × 10−1] |
| 4 | y(k − 2) [−2.24 × 10−1] | u(k − 6)y(k − 1) [−6.66 × 10−3] | u(k − 2)u(k − 6)y(k − 2)y(k − 6) [6.34 × 10−7] |
| 5 | u(k − 2)u(k − 4)u(k − 6) [−2.08 × 10−2] | u(k − 4)y(k − 1) [9.08 × 10−3] | u(k − 1)u(k − 5)y(k − 2)y(k − 5) [−1.44 × 10−6] |
| 6 | y4(k − 6) [1.02 × 10−7] | u(k − 5)u2(k − 6)y(k − 1) [−4.73 × 10−8] | u2(k − 5)y(k − 5) [1.33 × 10−4] |
| 7 | u(k − 6)y3(k − 4) [−8.85 × 10−8] | u4(k − 6) [2.43 × 10−6] | u2(k − 1)u(k − 4) [−4.68 × 10−5] |
| 8 | y(k − 2)y(k − 6) [3.71 × 10−3] | y4(k − 1) [−3.89 × 10−7] | u(k − 3)y2(k − 2) [4.46 × 10−5] |
| 9 | y3(k − 1)y(k − 6) [9.41 × 10−8] | u(k − 1)y3(k − 1) [2.16 × 10−7] | u(k − 1)u2(k − 6)y(k − 6) [7.85 × 10−7] |
| 10 | u(k − 2)u2(k − 5) [2.07 × 10−2] | u3(k − 4) [9.76 × 10−5] | y(k − 3) [−1.91 × 10−1] |
| 11 | y(k − 3) y(k − 4)y2(k − 6) [−5.02 × 10−7] | y(k − 3)y3(k − 6) [−1.55 × 10−7] | u2(k − 2) [1.72 × 10−3] |
| 12 | u(k − 5)y2(k − 1)y(k − 4) [6.67 × 10−7] | u3(k − 1)y(k − 6) [−3.55 × 10−6] | u(k − 3)u(k − 6)y2(k − 6) [7.15 × 10−7] |
| 13 | u(k − 1)y(k − 4)y(k − 6) [8.57 × 10−5] | u(k − 5)y(k − 2)y(k − 6) [−3.84 × 10−5] | u(k − 2)u(k − 6)y(k − 4)y(k − 5) [−1.15 × 10−7] |
| 14 | y(k − 1)y2(k − 5) [2.39 × 10−6] | u(k − 3)u3(k − 6) [−2.99 × 10−6] | u(k − 3)u(k − 6)y(k − 6) [−3.52 × 10−5] |
| 15 | y(k − 1)y(k − 3)y2(k − 6) [1.72 × 10−7] | u2(k − 1)y(k − 1)y(k − 6) [−2.37 × 10−6] | u2(k − 1)u2(k − 5) [−1.62 × 10−6] |
| 16 | u(k − 4)y(k − 1)y(k − 6) [−6.14 × 10−5] | y(k − 3) [−2.14 × 10−1] | u(k − 1)u(k − 6)y(k − 2)y(k − 4) [1.94 × 10−6] |
| 17 | y2(k − 3)y(k − 5) [1.30 × 10−5] | u(k − 2)y3(k − 1) [−1.62 × 10−6] | y(k − 4) [−2.10 × 10−1] |
| 18 | u(k − 6)y(k − 3) [−3.28 × 10−3] | u2(k − 1)y(k − 5) [1.18 × 10−5] | y4(k − 3) [−2.405065 × 10−8] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Lin, J.; Wang, X.; Han, Q.; Liu, Y. A Novel Data-Driven Feature Extraction Strategy and Its Application in Looseness Detection of Rotor-Bearing System. Mathematics 2023, 11, 2769. https://doi.org/10.3390/math11122769
Zhao Y, Lin J, Wang X, Han Q, Liu Y. A Novel Data-Driven Feature Extraction Strategy and Its Application in Looseness Detection of Rotor-Bearing System. Mathematics. 2023; 11(12):2769. https://doi.org/10.3390/math11122769
Chicago/Turabian StyleZhao, Yulai, Junzhe Lin, Xiaowei Wang, Qingkai Han, and Yang Liu. 2023. "A Novel Data-Driven Feature Extraction Strategy and Its Application in Looseness Detection of Rotor-Bearing System" Mathematics 11, no. 12: 2769. https://doi.org/10.3390/math11122769
APA StyleZhao, Y., Lin, J., Wang, X., Han, Q., & Liu, Y. (2023). A Novel Data-Driven Feature Extraction Strategy and Its Application in Looseness Detection of Rotor-Bearing System. Mathematics, 11(12), 2769. https://doi.org/10.3390/math11122769