
Enhancing Decomposition Approach for Solving Multi-Objective Dynamic Non-Linear Programming Problems Involving Fuzziness



Abstract
:1. Introduction
- (i)
- For the core terminology associated with the problem of stability in non-linear programming, the parameters are rearranged to study the case of MODP.
- (ii)
- An algorithm for computing the subset of the parametric space that possesses the same associated pareto optimal solution, is developed.
- (iii)
- The first-kind stability set is defined and determined.
2. Preliminaries

- (i)
- Addition: .
- (ii)
- Subtraction:
- (iii)
- Scalar multiplication:
- (i)
- (ii)
- (iii)
- (iv)
- (v)
- (i)
- if and
- (ii)
- if and or
- (iii)
- if and or
3. Problem Statement and Solution Concepts
4. Stability Set of the First Kind
Determination of the Stability Set of the First Kind
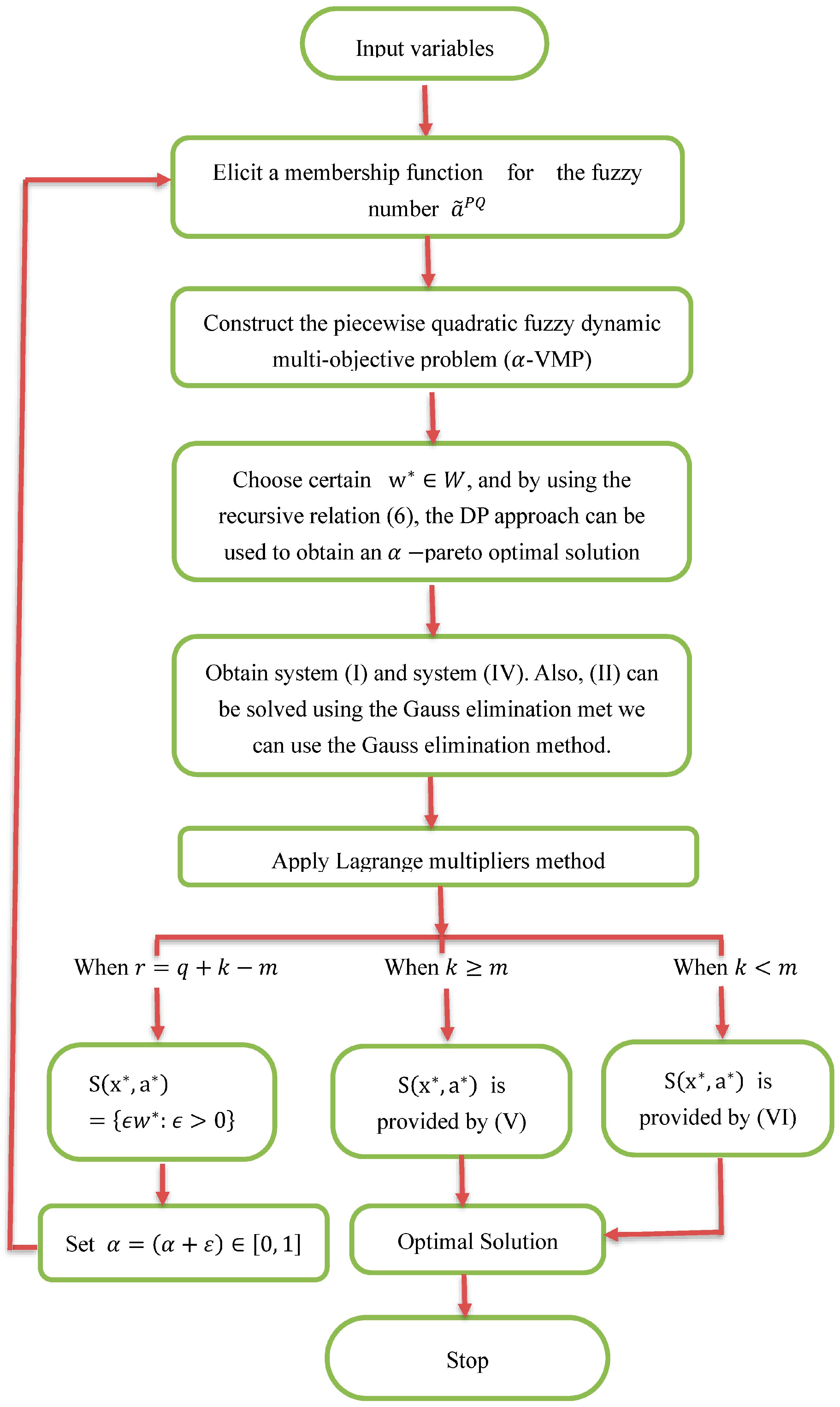
5. The Algorithm
- (i)
- When , we have and go to Step 7;
- (ii)
- When , we have that is provided by (V);
- (iii)
- When , we have that is provided by (VI).
6. A Numerical Example
7. Discussion
Advantages/Limitations of the Proposed Algorithm
- It does not take into account the complete parametric space, which has an endless number of possible scenarios. However, no other techniques can handle such situations where there are infinite scenarios.
- It is impossible to assign a unified technique for assigning the interesting scenarios for the DM, i.e., the approach does not involve a unified method where the DM’s vision and weights differ from one to another.
- Many factors must be considered such as (i) the possibility of formulating the problem as an NINP problem, (ii) the possibility of formulating the KKT conditions and solving it, and (iii) the capability of solving the PNINP problem’s selected scenarios and finding their exact optimal solutions.
8. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bellman, R.E. Dynamic Programming; Princeton University Press: Princeton, NJ, USA, 1957. [Google Scholar]
- Mine, H.; Fukushima, M. Decomposition of multiple criteria mathematical programming problems by dynamic programming. Int. J. Syst. Sci. 1979, 10, 557–566. [Google Scholar] [CrossRef]
- Carraway, R.L.; Morin, T.L.; Moskowitz, H. Generalized dynamic programming for multicriteria optimization. Eur. J. Oper. Res. 1990, 44, 95–104. [Google Scholar] [CrossRef]
- Abo-Sinna, M.A.; Hussein, M.L. An algorithm for decomposing the parametric space in multiobjective dynamic programming problems. Eur. J. Oper. Res. 1994, 73, 532–538. [Google Scholar] [CrossRef]
- Abo-Sinna, M.A.; Hussein, M.L. An algorithm for generating efficient solutions of multiobjective dynamic programming problems. Eur. J. Oper. Res. 1995, 80, 156–165. [Google Scholar] [CrossRef]
- Osman, M.S.A. Qualitative analysis of basic notions in parametric convex programming. I. Parameters in the constraints. Appl. Math. 1977, 22, 318–332. [Google Scholar] [CrossRef]
- Osman, M.S.A. Qualitative analysis of basic notions in parametric convex programming. II. Parameters in the objective function. Appl. Math. 1977, 22, 333–348. [Google Scholar] [CrossRef]
- Osman, M.S.A.; Dauer, J.P. Characterization of Basic Notations in Multiobjective Convex Programming Problems; Technical Report; University of Nebraska: Lincoln, NE, USA, 1983. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Bellman, R.E.; Zadeh, L.A. Decision-Making in a Fuzzy Environment. Manag. Sci. 1970, 17, 141–164. [Google Scholar] [CrossRef]
- Zimmermann, H.-J. Fuzzy programming and linear programming with several objective functions. Fuzzy Sets Syst. 1978, 1, 45–55. [Google Scholar] [CrossRef]
- Khalifa, H.A.E.-W.; Kumar, P.; Alharbi, M.G. On characterizing solution for multi-objective fractional two-stage solid transportation problem under fuzzy environment. J. Intell. Syst. 2021, 30, 620–635. [Google Scholar] [CrossRef]
- Prameela, K.U.; Kumar, P. Conceptualization of finite capacity single-server queuing model with triangular, trapezoidal and hexagonal fuzzy numbers using α-cuts. In Numerical Optimization in Engineering and Sciences; Dutta, D., Mahanty, B., Eds.; Advances in Intelligent Systems and Computing; Springer: Singapore, 2020; Volume 979, pp. 201–212. ISSN 2194-5357. [Google Scholar] [CrossRef]
- Kumar, P. Optimal policies for inventory model with shortages, time-varying holding and ordering costs in trapezoidal fuzzy environment. Indep. J. Manag. Prod. 2021, 12, 557–574. [Google Scholar] [CrossRef]
- Kumar, P. Solution of Extended Multi-Objective Portfolio Selection Problem in Uncertain Environment Using Weighted Tchebycheff Method. Computers 2022, 11, 144. [Google Scholar] [CrossRef]
- Prameela, K.U.; Kumar, P. Execution proportions of multi-server queuing model with pentagonal fuzzy number: DSW algorithm approach. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 1047–1051. [Google Scholar]
- Dubois, D.; Prade, H. Fuzzy Sets and Systems: Theory and Applications; Academic Press: New York, NY, USA, 1980. [Google Scholar]
- Kaufmann, A.; Gupta, M.M. Fuzzy Mathematical Models in Engineering and Management Science; Elsevier Science Publishing Company Inc.: New York, NY, USA, 1988. [Google Scholar]
- Fei, F.; Yanmei, W.; Haiyang, X.; Nguyen Tien, V.T. Efficient road traffic anti-collision warining system based on fuzzy nonlinear programming. Int. J. Syst. Assur. Eng. Manag. 2022, 13 (Suppl. S1), S456–S461. [Google Scholar] [CrossRef]
- Nguyen, T.V.; Huynh, N.T.; Vu, N.C.; Kieu, V.N.; Huang, S.C. Optimizing compliant gripper mechanism design by employing an effective bi-algorithm: Fuzzy logic and ANFIS. Microsyst. Technol. 2021, 27, 3389–3412. [Google Scholar] [CrossRef]
- Zimmermann, H.J. Fuzzy Set Theory and Its Applications, (International Series in Management Science/Operations Research); Kluwer-Nijhoff Publishing: Dordrecht, The Netherlands, 1985. [Google Scholar]
- Esogbue, A.O. Dynamic programming, fuzzy set, and the modeling of R& D management control system. IEEE Trans. Syst. Manag. Cybern. 1983, 13, 18–30. [Google Scholar]
- Esogbue, A.O.; Bellman, R.E. Fuzzy dynamic programming and it is extensions. In Times/Studies in the Management Sciences; North-Holland Publishing Co.: Amsterdam, The Netherlands, 1984; Volume 200, pp. 147–167. [Google Scholar]
- Hussein, M.L.; Abo-Sinna, M.A. Decomposition of multiobjective programming problems by hybrid fuzzy-dynamic programming. Fuzzy Sets Syst. 1993, 60, 25–32. [Google Scholar] [CrossRef]
- Tanaka, H.; Asai, K. Fuzzy linear programming problems with fuzzy numbers. Fuzzy Sets Syst. 1984, 13, 1–10. [Google Scholar] [CrossRef]
- Orlovski, S. Multiobjective programming problems with fuzzy parameters. Control. Cybern. 1984, 13, 175–183. [Google Scholar]
- Sakawa, M.; Yano, H. Interactive decision making for multiobjective nonlinear programming problems with fuzzy parameters. Fuzzy Sets Syst. 1989, 29, 315–326. [Google Scholar] [CrossRef]
- Sakawa, M.; Yano, H. An interactive fuzzy satisficing method for multiobjective nonlinear programming problems with fuzzy parameters. Fuzzy Sets Syst. 1990, 30, 221–238. [Google Scholar] [CrossRef] [Green Version]
- Osman, M.S.A.; El-Banna, A.H. Stability of multiobjective nonlinear programming problems with fuzzy parameters. Math. Comput. Simul. 1993, 35, 321–326. [Google Scholar] [CrossRef]
- Moghaddam, J.A.R.; Ghoseiri, K. Fuzzy dynamic multi- objective Data Envelopment Analysis model. Expert Syst. Appl. 2011, 38, 850–855. [Google Scholar] [CrossRef]
- Muruganantham, A.; Zhao, Y.; Gee, S.B.; Qiu, X.; Tan, K.C. Dynamic multiobjective optimization using evolutionary algorithm with Kalman Filter. Procedia Comput. Sci. 2013, 24, 66–75. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Chen, H.; Xie, Z.; Chen, C.; Sallam, A. Dynamic multiobjective optimization algorithm based on average distance linear predication model. Sci. World J. 2014, 2014, 389742. [Google Scholar] [CrossRef] [Green Version]
- Deng, X.; Xu, W.-J.; Wang, Z.-Q. Dynamic multi- objective fuzzy portfolio model that considers corporate social responsibility and background risk. J. Interdiscip. Math. 2016, 19, 413–432. [Google Scholar] [CrossRef]
- Besheli, S.F.; Keshteli, R.N.; Emami, S.; Rasoluli, S.M. A fuzzy dynamic multi- objective multi- item model by considering customer satisfaction in a supply chain. Sci. Iran. E 2017, 24, 2623–2639. [Google Scholar] [CrossRef] [Green Version]
- Peraza, C.; Valdez, F.; Castro, J.R.; Castillo, O. Fuzzy dynamic parameter Adaptation in the harmony search algorithm for the optimization of the ball and beam controller. Adv. Oper. Res. 2018, 2018, 3092872. [Google Scholar] [CrossRef]
- Azevedo, M.M.; Crispim, J.A.; de Sousa, J.P. A dynamic multiobjective model for designing machine layouts. IFAC-PapersOnLine 2019, 52, 1896–1901. [Google Scholar] [CrossRef]
- Ni, P.; Gao, J.; Song, Y.; Quan, W.; Xing, Q. A New Method for Dynamic Multi-Objective Optimization Based on Segment and Cloud Prediction. Symmetry 2020, 12, 465. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Shi, L.; Liu, X. A new dynamic strategy for dynamic multi-objective optimization. Inf. Sci. 2020, 529, 116–131. [Google Scholar] [CrossRef]
- Liu, R.; Yang, P.; Liu, J. A dynamic multi-objective optimization evolutionary algorithm for complex environmental changes. Knowl.-Based Syst. 2021, 216, 106612. [Google Scholar] [CrossRef]
- Zou, F.; Yen, G.G.; Zhao, C. Dynamic multiobjective optimization driven by inverse reinforcement learning. Inf. Sci. 2021, 575, 468–484. [Google Scholar] [CrossRef]
- Zhang, Q.; Jiang, S.; Yang, S.; Song, H. Solving dynamic multi-objective problems with a new prediction-based optimization algorithm. PLoS ONE 2021, 16, e0254839. [Google Scholar] [CrossRef]
- Jain, S. Close interval approximation of piecewise quadratic fuzzy numbers for fuzzy fractional program. Iran. J. Oper. Res. 2010, 2, 77–88. [Google Scholar]
- Rockafellar, R. Duality and stability in extremal problems involving convex functions. Pac. J. Math. 1967, 21, 167–181. [Google Scholar] [CrossRef]
- Chankong, V.; Haimes, Y.Y. Multiobjective Decision Making Theory and Methodology; North-Holland: New York, NY, USA, 1983. [Google Scholar]
- Mangasarian, O.L. Nonlinear Programming; McGraw-Hill: New York, NY, USA, 1969. [Google Scholar]
- Khalifa, H.A.; Kumar, P. Multi-objective optimization for solving cooperative continuous static games using Karush-Kuhn-Tucker conditions. Int. J. Oper. Res. 2023, 46, 133–147. [Google Scholar] [CrossRef]
- Zeleny, M. Linear Multiobjective Programming, Lecture Notes in Economics and Mathematical Systems; Springer: New York, NY, USA, 1974; Volume 95. [Google Scholar]
- Mandow, L.; Perez-De-La-Cruz, J.L.; Pozas, N. Multi-objective dynamic programming with limited precision. J. Glob. Optim. 2021, 82, 595–614. [Google Scholar] [CrossRef]
- Aljawad, R.A.; Al-Jilawi, A.S. Solving multiobjective functions of dynamics optimization based on constraint and unconstraint non-linear programming. Int. J. Health Sci. 2022, 6, 5236–5248. [Google Scholar] [CrossRef]
- Ji, J.-Y.; Yu, W.-J.; Gong, Y.-J.; Zhang, J. Multiobjective optimization with ϵ-constrained method for solving real-parameter constrained optimization problems. Inf. Sci. 2018, 467, 15–34. [Google Scholar] [CrossRef]
- Abo-Sinna, M.A. Stability of multi-objective dynamic programming problems with fuzzy parameters. J. Math. 1998, 6, 891–904. [Google Scholar]


{kind=link}
{kind=link}
| Author(s) | Research Title | PQFN as Fuzzy Parameters | -Pareto Optimal Solutions | Stability Set of the First Kind |
|---|---|---|---|---|
| Mandow et al. [48] | Multi-objective dynamic programming with limited precision | NO | NO | NO |
| Aljawad and Al-Jilawi [49] | Solving multi-objective functions of dynamic optimization based on constrained and unconstrained non- linear programming | NO | NO | NO |
| Ji et al. [50] | Multi-objective optimization with -constrained method for solving real parameter constrained optimization problems | NO | NO | NO |
| Abo-Sinna [51] | Stability of multi-objective dynamic programming problems with fuzzy parameters | NO | YES | YES |
| Proposed study | Enhancing decomposition approach for solving multi-objective dynamic non-linear programming problems involving fuzziness | YES | YES | YES |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, P.; Khalifa, H.A.E.-W. Enhancing Decomposition Approach for Solving Multi-Objective Dynamic Non-Linear Programming Problems Involving Fuzziness. Mathematics 2023, 11, 3123. https://doi.org/10.3390/math11143123
Kumar P, Khalifa HAE-W. Enhancing Decomposition Approach for Solving Multi-Objective Dynamic Non-Linear Programming Problems Involving Fuzziness. Mathematics. 2023; 11(14):3123. https://doi.org/10.3390/math11143123
Chicago/Turabian StyleKumar, Pavan, and Hamiden Abd El-Wahed Khalifa. 2023. "Enhancing Decomposition Approach for Solving Multi-Objective Dynamic Non-Linear Programming Problems Involving Fuzziness" Mathematics 11, no. 14: 3123. https://doi.org/10.3390/math11143123
APA StyleKumar, P., & Khalifa, H. A. E. -W. (2023). Enhancing Decomposition Approach for Solving Multi-Objective Dynamic Non-Linear Programming Problems Involving Fuzziness. Mathematics, 11(14), 3123. https://doi.org/10.3390/math11143123