
An Improved Strength Pareto Evolutionary Algorithm 2 with Adaptive Crossover Operator for Bi-Objective Distributed Unmanned Aerial Vehicle Delivery

Abstract
:1. Introduction
- This paper establishes a bi-objective model to solve the UAV delivery problem. The previous way of thinking, which only considered the total cost of transportation, is changed, to face this type of problem from a multi-objective perspective, and the effect of the freshness of perishable products is taken into account when calculating the customer satisfaction.
- An improved SPEA2 is proposed in this paper. Considering that SPEA2 itself performs well in global searching, this paper conducts local searching for the points with higher adaptation after each iteration, meaning that it takes both the global and local searching ability into account. In addition, the crossover operator is also improved, to increase the convergence speed of the algorithm, and avoid falling into local optimality.
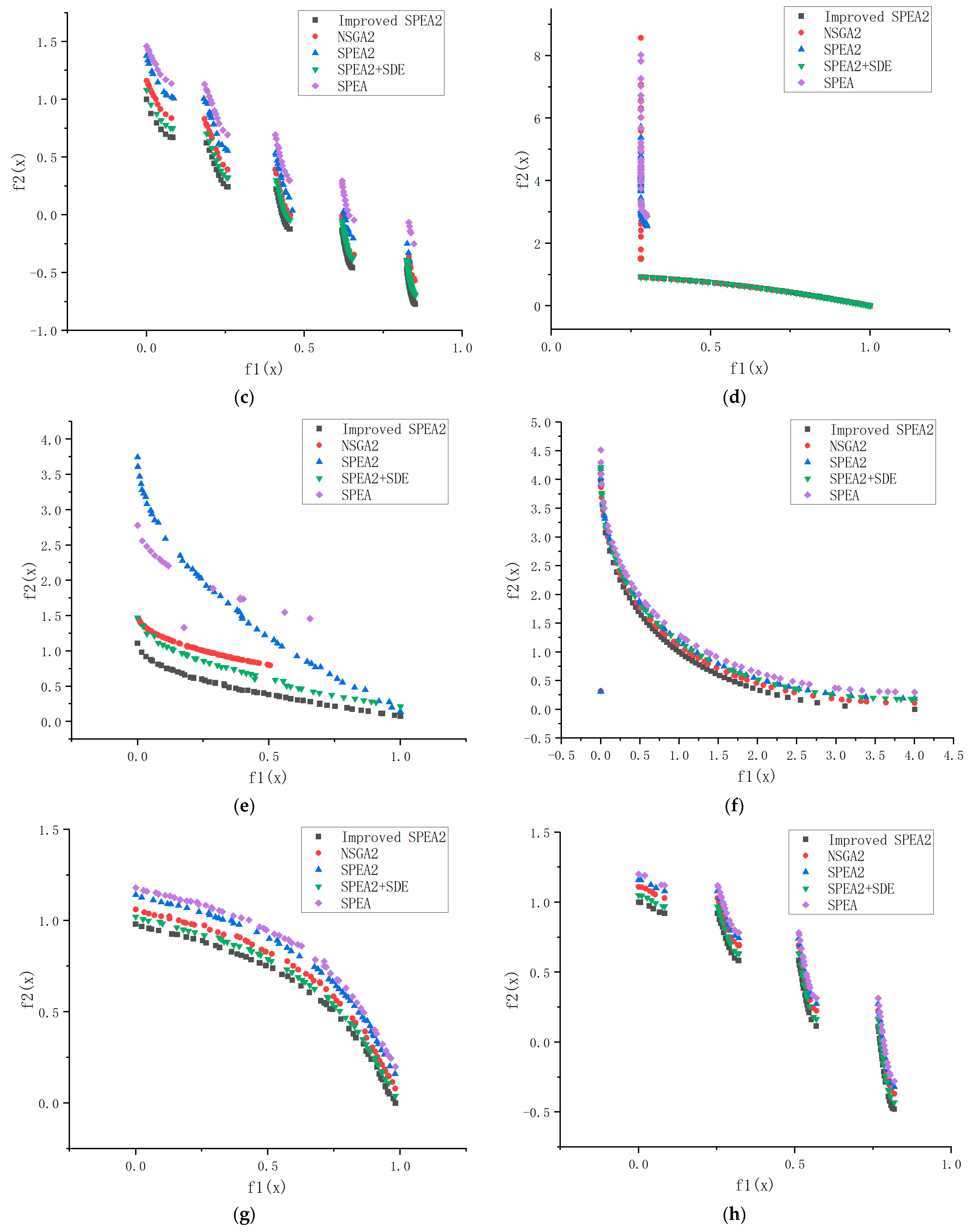
- The concept of convergence distance is proposed in this paper. The convergence speed of the algorithm is judged by calculating the distance between the experimental results and the theoretical optimal results.
2. Related Work
2.1. Background of the MOEA
- (1)
- First-generation MOEA
- (2)
- Second-generation MOEA
- (3)
- Classification of MOEA
2.2. Background of Memetic Algorithms
2.3. Background of Goods Delivery
3. Model Building
3.1. Problem Statement and Assumptions
- (1)
- The number of UAVs in the distribution center is enough to complete all tasks.
- (2)
- Each customer can only submit one order, and can only be served once by a UAV.
- (3)
- The same order cannot be completed by multiple UAVs; that is, the cargo demand of any order cannot exceed the maximum load capacity of a single UAV.
- (4)
- All the products are fresh before delivery, and the quality decreases during transportation.
3.2. Notations
| Sets: |
| : Set of distribution centers : Set of UAVs : Set of delivery points : Set of all points |
| Parameters: |
| : The average velocity of a UAV : Unit distance cost of a UAV , : Maximum load of a UAV , : Maximum mileage of a UAV , : Time from point to point , : Distance from point to point , : Demand of customer , : Pickup volume from distribution center , : Load of UAV leaving point , , : The deteriorate rate, 0.0216/h : The deterioration degree of the goods transported by UAV , received by customer , , : The latest delivery time that customer can accept, |
| Decision variables: |
: The time of UAV arriving at point |
3.3. The Mathematic Model
3.3.1. Objective Function
- (1)
- Minimize distance cost:
- (2)
- Maximize customer satisfaction:
3.3.2. Constraint Function
3.4. Model Analysis
4. SPEA2 and Its Improvement
4.1. Overview of SPEA2
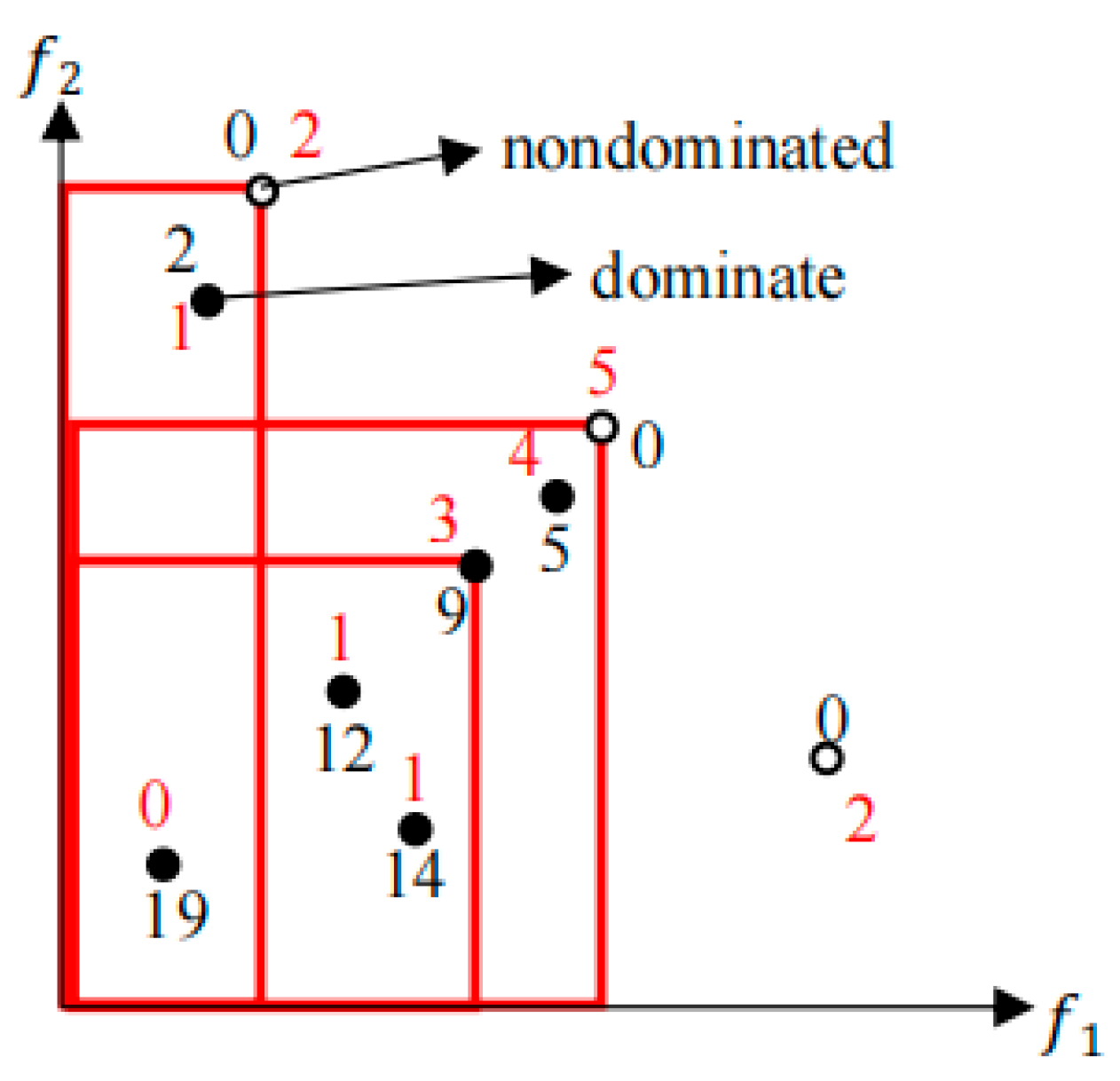
4.1.1. Pareto Optimal Solution Theory
4.1.2. Strength Pareto Evolutionary Algorithm 2
| Algorithm 1: Strength Pareto evolutionary algorithm 2 |
| Input: (Maximum number of iterations), (Population number) Output: (non-dominated set) Process:
|
4.2. Strategies to Improve SPEA2
4.2.1. Add a Local Search Policy
4.2.2. Improved Crossover Operator
4.3. Steps to Improve SPEA2
| Algorithm 2: Improved strength Pareto evolutionary algorithm 2 |
| Input: (Maximum iteration), (population), (archive size) Output: (non-dominated set) Process:
|
5. Experimental Results and Analysis
5.1. Experimental Environment
5.2. Algorithm Comparison
- (1)
- VN: The numbers of times that every algorithm can run successfully and obtain results [64]. According to these data, the ability of algorithms to find results can be understood. Generally speaking, algorithms that cannot find useful solutions stably and efficiently will be abandoned.
- (2)
- TT100%: Sayyad et al. proposed this index in 2013 [65]; it represents the time at which the algorithm reaches TT100%. This can be used to express the speed at which the algorithm converges with the Pareto front.
- (3)
- Hypervolume (HV): A common performance indicator in the MOEA field. The Pareto front dominates a solution space , and is a point in . According to the definition of Zitzler [16], the HV represents the volume of . Taking as the boundary, can be obtained using Formula (17):
5.3. Parameter Selection
5.4. Simulation Experiment
6. Conclusions
- (1)
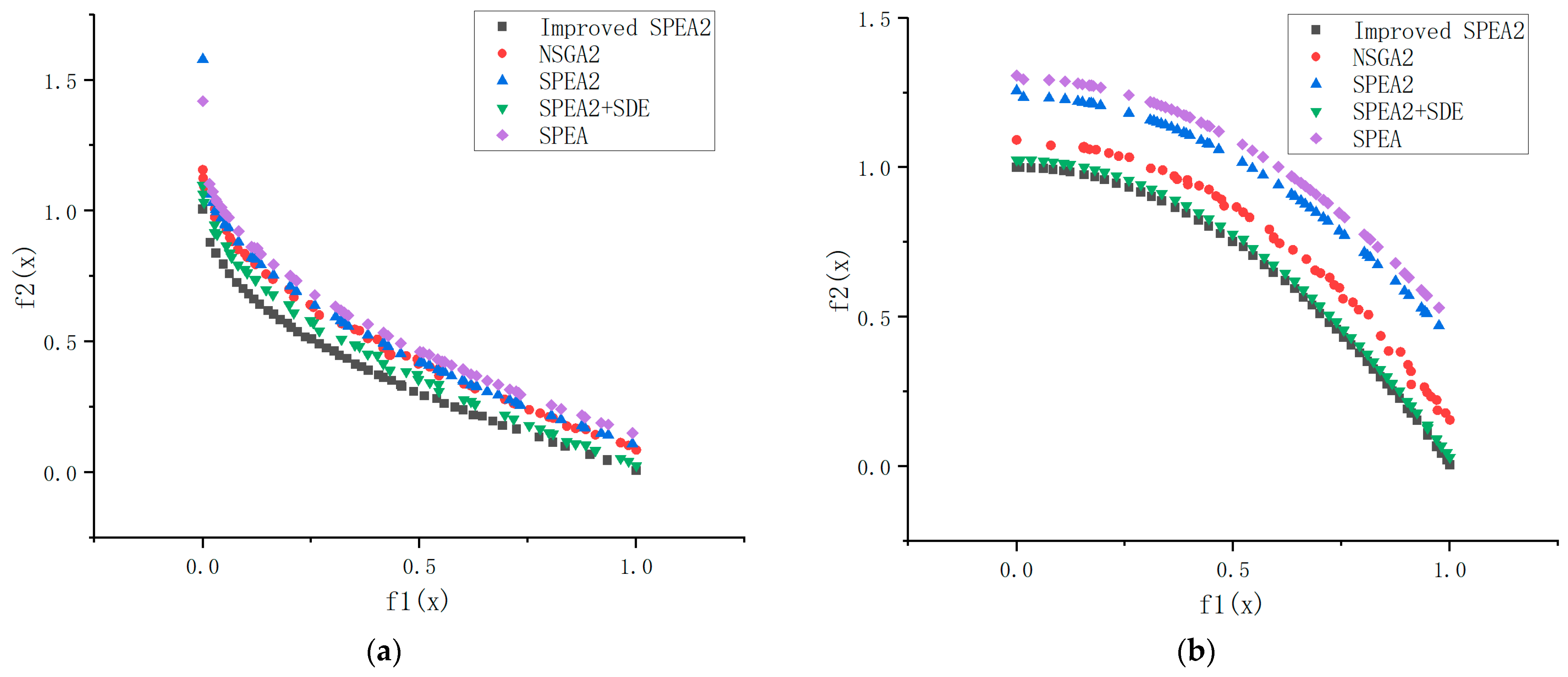
- The improved SPEA2, SPEA2, NSGA2, SPEA2 + SDE, and SPEA were tested through nine classical test functions. Compared with the other four algorithms, the convergence of the improved SPEA2, and the stability of the Pareto solution set are significantly improved.
- (2)
- In the empirical analysis, the improved SPEA2 is nearer to the theoretical Pareto front than the SPEA2, NSGA2, SPEA2 + SDE, and SPEA, and the result delivery is more uniform and stable. The convergence and stability of the algorithm were verified according to the aspects of the Pareto front, generational distance, and spacing. Through comprehensive analysis, the improved SPEA2 has been made more effective in dealing with the delivery of UAVs with hard time windows, and can achieve better results.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Z.; Zhang, Z.; Chen, X. Research on Location Selection of UAV Distribution Center Based on Improved Gravity Method. J. Phys. Conf. Ser. 2020, 1624, 052029. [Google Scholar] [CrossRef]
- Chopra, O.; Ghose, D. Distributed Control for Multiple UAV Transport of Slung Loads. In Proceedings of the AIAA Science and Technology Forum and Exposition, San Diego, CA, USA, 3–7 January 2022. [Google Scholar]
- Choi, T.-M. Innovative “Bring-Service-Near-Your-Home” operations under Corona-Virus (COVID-19/SARS-CoV-2) outbreak: Can logistics become the Messiah? Transp. Res. Part E Logist. Transp. Rev. 2020, 140, 101961. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Chi, H.; Zhou, W.; Fan, T.; Piramuthu, S. Deterioration control decision support for perishable inventory management. Decis. Support Syst. 2020, 134, 113308. [Google Scholar] [CrossRef]
- Zhang, Q.; Zheng, X.; Yang, S.; Li, C.; Wang, K. Evaluation and Cluster Analysis of E-Businesses with Perishable Products and Cold Supply Chain. In Proceedings of the 2018 15th International Conference on Service Systems and Service Management (ICSSSM), Hangzhou, China, 21–22 July 2018; IEEE: Piscataway Township, NJ, USA; pp. 1–6. [Google Scholar]
- Zitzler, E.; Deb, K.; Thiele, L. Comparison of multi-objective evolutionary algorithms: Empirical study. Evol. Comput. 2000, 8, 173–195. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Q.; Zhang, J.; Zhong, Y.; Ye, C.; Min, X. Parallel MOEA Based on Consensus and Membrane Structure for Inferring Phylogenetic Reconstruction. IEEE Access 2019, 8, 6177–6189. [Google Scholar] [CrossRef]
- Chen, H.; Tian, Y.; Pedrycz, W.; Wu, G.; Wang, R.; Wang, L. Hyperplane Assisted Evolutionary Algorithm for Many-Objective Optimization Problems. IEEE Trans. Cybern. 2019, 7, 3367–3380. [Google Scholar] [CrossRef]
- Huang, W.; Zhang, Y.; Li, L. Survey on Multi-Objective Evolutionary Algorithms. J. Phys. Conf. Ser. 2019, 1288, 012057. [Google Scholar] [CrossRef]
- Yu, B.; Gu, T.; Chang, L.; Li, L.; Lan, R.; Sun, P. A Multi-Objective Evolutionary Algorithm Based on Adaptive Grid. In Proceedings of the 2019 9th International Conference on Information Science and Technology (ICIST), Hulunbuir, China, 2–5 August 2019; IEEE: Piscataway Township, NJ, USA, 2019. [Google Scholar]
- Schaffer, J.D. Multiple objective optimization with vector evaluated genetic algorithms. In Proceedings of the 1st International Conference on Genetic Algorithms, Broadway Hillsdale, NJ, USA, 1 July 1985; L. Erlbaum Associates Inc.: Mahwah, NJ, USA, 1985; pp. 93–100. [Google Scholar]
- Murata, T.; Ishibuchi, H. MOGA: Multi-objective genetic algorithms. In Proceedings of the 2nd IEEE International Conference on Evolutionary Computing, Perth, WA, Australia, 29 November–1 December 1995; Volume 2, pp. 289–294. [Google Scholar]
- Srinivas, N.; Deb, K. Multiobjective optimization using nondominated sorting in genetic algorithms. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]
- Horn, J.; Nafpliotis, N.; Goldberg, D.E. A niched Pareto genetic algorithm for multiobjective optimization. In Proceedings of the First IEEE Conference on Evolutionary Computation, IEEE World Congress on Computational Intelligence, Orlando, FL, USA, 27–29 June 1994; IEEE Press: Piscataway, NJ, USA, 1994; Volume 1, pp. 82–87. [Google Scholar]
- Jiao, L.; Shang, R.; Liu, F.; Zhang, W. Theoretical basis of natural computation. In Brain and Nature-Inspired Learning Computation and Recognition; Elsevier: Amsterdam, The Netherlands, 2020; pp. 81–95. [Google Scholar]
- Zitzler, E.; Thiele, L. Multiobjective Evolutionary Algorithms: A Comparative Case Study and the Strength Pareto Evolutionary Algorithm. IEEE Trans. Evol. Comput. 1999, 3, 257–271. [Google Scholar] [CrossRef] [Green Version]
- Zitzler, E.; Laumanns, M.; Thiele, L. SPEA2: Improving the strength Pareto evolutionary algorithm. In Evolutionary Methods for Design, Optimization and Control with Applications to Industrial Problems; Springer: Berlin/Heidelberg, Germany, 2002; pp. 95–100. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A Fast and Elitist Multi-objective Genetic Algorithm: NSGA2. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Knowles, J.D.; Corne, D.W. Approximating the nondominated front using the Pareto archived evolution strategy. Evol. Comput. 2000, 8, 149–172. [Google Scholar] [CrossRef]
- Erickson, M.; Mayer, A.; Horn, J. The niched pareto genetic algorithm 2 applied to the design of groundwater remediation systems. In Evolutionary Multi-Criterion Optimization; Springer: Berlin/Heidelberg, Germany, 2001; pp. 681–695. [Google Scholar]
- Corne, D.W.; Knowles, J.D.; Oates, M.J. The Pareto envelope-based selection algorithm for multiobjective optimization. In Parallel Problem Solving from Nature PPSN VI; Springer: Berlin/Heidelberg, Germany, 2000; pp. 839–848. [Google Scholar]
- Corne, D.W.; Jerram, N.R.; Knowles, J.D.; Oates, M.J. PESA-II: Region-based selection in evolutionary multiobjective optimization. In Proceedings of the Genetic and Evolutionary Computation Conference (GECCO-2001), San Francisco, CA, USA, 7–11 July 2011; Morgan Kaufmann Publishers: Burlington, MA, USA, 2001; pp. 283–290. [Google Scholar]
- Zhou, A.; Qu, B.-Y.; Li, H.; Zhao, S.-Z.; Suganthan, P.N.; Zhang, Q. Multiobjective evolutionary algorithms: A survey of the state of the art. Swarm Evol. Comput. 2011, 1, 32–49. [Google Scholar] [CrossRef]
- Li, B.; Li, J.; Tang, K.; Yao, X. Many-objective evolutionary algorithms: A survey. ACM Comput. Surv. 2015, 48, 13. [Google Scholar] [CrossRef] [Green Version]
- Li, K.; Wang, R.; Zhang, T.; Ishibuchi, H. Evolutionary many-objective optimization: A comparative study of the state-of-the-art. IEEE Access 2018, 6, 26194–26214. [Google Scholar] [CrossRef]
- Huseyinov, I.; Bayrakdar, A. Performance Evaluation of NSGA-III and SPEA2 in Solving a Multi-Objective Single-Period Multi-Item Inventory Problem. In Proceedings of the 2019 4th International Conference on Computer Science and Engineering (UBMK), Samsun, Turkey, 11–15 September 2019. [Google Scholar]
- Moscato, P. On Evolution, Search, Optimization, Genetic Algorithms and Martial Arts: Towards Memetic Algorithms. Caltech Concurr. Comput. Program C3P Rep. 1989, 826, 37. [Google Scholar]
- Moscato, P.; Norman, M.G. A memetic approach for the traveling salesman problem implementation of a computational ecology for combinatorial optimization on message-passing systems. Parallel Comput. Transput. Appl. 1992, 1, 177–186. [Google Scholar]
- Dawkins, R. The Selfish Gene; Oxford University Press: Oxford, UK, 2016. [Google Scholar]
- Clodomir, S.; Marcos, O.; Carmelo, B.; Menezes, R. Beyond exploitation: Measuring the impact of local search in swarm-based memetic algorithms through the interactions of individuals in the population. Swarm Evol. Comput. 2022, 70, 101040. [Google Scholar]
- Mu, C.-H.; Xie, J.; Liu, Y.; Chen, F.; Liu, Y.; Jiao, L.-C. Memetic algorithm with simulated annealing strategy and tightness greedy optimization for community detection in networks. Appl. Soft Comput. 2015, 34, 485–501. [Google Scholar] [CrossRef]
- Acampora, G.; Cataudella, V.; Hegde, P.R.; Lucignano, P.; Passarelli, G.; Vitiello, A. Memetic algorithms for mapping p-body interacting systems in effective quantum 2-body Hamiltonians. Appl. Soft Comput. 2021, 110, 107634. [Google Scholar] [CrossRef]
- Vuppuluri, P.; Chellapilla, P. Serial and parallel memetic algorithms for the bounded diameter minimum spanning tree problem. Expert Syst. 2021, 38, e12610. [Google Scholar] [CrossRef]
- Nguyen, P.T.H.; Sudholt, D. Memetic algorithms outperform evolutionary algorithms in multimodal optimization. Artif. Intell. 2020, 287, 103345. [Google Scholar] [CrossRef]
- Tarantilis, C.D.; Kiranoudis, C.T. A meta-heuristic algorithm for the efficient distribution of perishable foods. J. Food Eng. 2001, 50, 1–9. [Google Scholar] [CrossRef]
- Rabbani, M.; Farshbaf-Geranmayeh, A.; Haghjoo, N. Vehicle routing problem with considering multi-middle depots for perishable food delivery. Uncertain Supply Chain. Manag. 2016, 4, 171–182. [Google Scholar] [CrossRef]
- Alvarez, A.; Cordeau, J.-F.; Jans, R.; Munari, P.; Morabito, R. Formulations, branch-and-cut and a hybrid heuristic algorithm for an inventory routing problem with perishable products. Eur. J. Oper. Res. 2020, 283, 511–529. [Google Scholar] [CrossRef]
- Liang, Y.; Liu, F.; Lim, A.; Zhang, D. An integrated route, temperature and humidity planning problem for the distribution of perishable products. Comput. Ind. Eng. 2020, 147, 106623. [Google Scholar] [CrossRef]
- Meneghetti, A.; Ceschia, S. Energy-efficient frozen food transports: The Refrigerated Routing Problem. Int. J. Prod. Res. 2020, 58, 4164–4181. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Q.; Guan, X.; Xu, M.; Liu, Y.; Wang, H. Two-echelon collaborative multi-depot multi-period vehicle routing problem. Expert Syst. Appl. 2021, 114201, 167. [Google Scholar] [CrossRef]
- Tirkolaee, E.B.; Aydin, N.S. Integrated design of sustainable supply chain and transportation network using a fuzzy bi-level decision support system for perishable products. Expert Syst. Appl. 2022, 195, 116628. [Google Scholar] [CrossRef]
- Cardozo, R.N. An Experimental Study of Customer Effort, Expectation, and Satisfaction. J. Mark. Res. 1965, 2, 244. [Google Scholar] [CrossRef]
- Rahimi, M.; Baboli, A.; Rekik, Y. A bi-objective inventory routing problem by considering customer satisfaction level in context of perishable product. In Proceedings of the 2014 IEEE Symposium on Computational Intelligence in Production and Logistics Systems (CIPLS), Orlando, FL, USA, 9–12 December 2014; IEEE: Piscataway Township, NJ, USA, 2014; pp. 91–97. [Google Scholar]
- Wang, X.; Sun, X.; Dong, J.; Jie, D.; Meng, W. Optimizing Terminal Delivery of Perishable Products considering Customer Satisfaction. Math. Probl. Eng. 2017, 2017, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Chu, F.; Feng, C.; Chu, C.; Zhou, M. Integrated Production Inventory Routing Planning for Intelligent Food Logistics Systems. IEEE Trans. Intell. Transp. Syst. 2019, 20, 867–878. [Google Scholar] [CrossRef]
- Liang, X.; Wang, N.; Zhang, M.; Jiang, B. Bi-objective multi-period vehicle routing for perishable goods delivery considering customer satisfaction. Expert Syst. Appl. 2023, 220, 119712. [Google Scholar] [CrossRef]
- Labuza, T.P. Application of chemical kinetics to deterioration of foods. J. Chem. Educ. 1984, 61, 348. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Li, D. A dynamic product quality evaluation-based pricing model for perishable food supply chains. Omega 2012, 40, 906–917. [Google Scholar] [CrossRef]
- Li, Y.; Yang, W.; Huang, B. Impact of UAV Delivery on Sustainability and Costs under Traffic Restrictions. Math. Probl. Eng. 2020, 2020, 9437605. [Google Scholar] [CrossRef]
- Zhou, B.; Huang, H.; Xu, Y.; Li, X.; Gao, H.; Chen, T.; Liu, X.; Xu, J. Parallel task scheduling algorithm based on collaborative device and edge in UAV delivery system. Jisuanji Jicheng Zhizao Xitong/Comput. Integr. Manuf. Syst. CIMS 2021, 27, 2575–2582. [Google Scholar]
- Cao, Z.; Wang, Z.; Zhao, L.; Fan, F.; Sun, Y. Multi-constraint and multi-objective optimization of free-form reticulated shells using improved optimization algorithm. Eng. Struct. 2022, 250, 113442. [Google Scholar] [CrossRef]
- Xue, Y.; Li, M.; Shepperd, M.; Lauria, S.; Liu, X. A novel aggregation-based dominance for Pareto-based evolutionary algorithms to configure software product lines. Neurocomputing 2019, 364, 32–48. [Google Scholar] [CrossRef]
- Coello, C.A.C.; Veldhuizen, D.A.V.; Lamont, G.B. Multi-Criteria Decision Making. In Genetic Algorithms and Evolutionary Computation Evolutionary Algorithms for Solving Multi-Objective Problems; Springer: Berlin/Heidelberg, Germany, 2002; pp. 321–347. [Google Scholar]
- Viguier, F.; Pierreval, H. An Approach to The Design of a Hybrid Organization of Workshops into Functional Layout and Group Technology Cells. Int. J. Comput. Integr. Manuf. 2004, 17, 108–116. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, C.; Zhang, B.; Duan, P.; Yang, Y. Decomposition-Based Sub-Problem Optimal Solution Updating Direction-Guided Evolutionary Many-Objective Algorithm. Inf. Sci. 2018, 448–449, 91–111. [Google Scholar] [CrossRef]
- Li, H.; Chen, F.; Ji, X.; Li, J.; Zhou, J. Master production plan of parallel casting workshop based on improved SPEA2. Jisuanji Jicheng Zhizao Xitong/Comput. Integr. Manuf. Syst. 2021, 27, 1072–1080. [Google Scholar]
- Duan, T.; Wang, W.; Li, X.; Wang, T.; Chen, X.; Zhou, X. Intelligent Collaborative Architecture Design based on Unmanned Combat Swarm. In Proceedings of the 2020 6th International Conference on Big Data and Information Analytics (BigDIA), Shenzhen, China, 4–6 December 2020. [Google Scholar]
- Lin, F.; Zeng, J.; Xiahou, J.; Wang, B.; Zeng, W.; Lv, H. Multi-Objective Evolutionary Algorithm Based on Non-Dominated Sorting and Bidirectional Local Search for Big Data. IEEE Trans. Ind. Inform. 2017, 13, 1979–1988. [Google Scholar] [CrossRef]
- Dariane, A.B.; Sabokdast, M.M.; Karami, F.; Asadi, R.; Ponnambalam, K.; Mousavi, S.J. Integrated operation of multi-reservoir and many-objective system using fuzzified hedging rule and strength pareto evolutionary optimization algorithm (SPEA2). Water 2021, 13, 1995. [Google Scholar] [CrossRef]
- Yu, W.; Zhang, L. Many-objective evolutionary computation based on adaptive hypersphere dynamic angle vector dominance. Concurr. Comput. Pract. Exp. 2021, 33, e6238. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, D. An Improved SPEA2 Algorithm with Local Search for Multi-Objective Investment Decision-Making. Appl. Sci. 2019, 9, 1675. [Google Scholar] [CrossRef] [Green Version]
- Xia, M.; Zhang, C.; Weng, L.; Liu, J.; Wang, Y.; Tiwari, S.; Trivedi, M.; Kohle, M.L. Robot path planning based on multi-objective optimization with local search. J. Intell. Fuzzy Syst. 2018, 35, 1755–1764. [Google Scholar] [CrossRef]
- Tian, Y.; Cheng, R.; Zhang, X.; Jin, Y. PlatEMO: A MATLAB platform for evolutionary multi-objective optimization. IEEE Comput. Intell. Mag. 2017, 12, 73–87. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Segura, S.; Zheng, W.; Segura, S.; Zheng, W. SIP: Optimal product selection from feature models using many Objective evolutionary optimization. ACM Trans. Softw. Eng. Methodol. 2016, 25, 1–39. [Google Scholar]
- Sayyad, A.S.; Ingram, J.; Menzies, T.; Ammar, H. Scalable product line configuration: A straw to break the camel’s back. In Proceedings of the 2013 28th IEEE/ACM International Conference on Automated Software Engineering (ASE), Silicon Valley, CA, USA, 11–15 November 2013; IEEE: Piscataway, NJ, USA, 2013. [Google Scholar]
- Fleischer, M. The Measure of Pareto Optima: Applications to Multi-objective Metaheuristics. In Proceedings of the International Conference on Evolutionary Multi-Criterion Optimization, Faro, Portugal, 8–11 April 2003; Springer: Berlin/Heidelberg, Germany, 2003; pp. 519–533. [Google Scholar]
- Schott, J.R. Fault Tolerant Design Using Single and Multicriteria Genetic Algorithm Optimization. Master’s Thesis, Department of Aeronautics and Astronautics, Massachusetts Institute of Technology, Cambridge, MA, USA, 1995. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Dim | Range | |
|---|---|---|---|
| 30 | [0, 1] | ||
| 30 | [0, 1] | ||
| 30 | [0, 1] | ||
| 30 | [0, 1] | ||
| 10 | [−5, 5] | ||
| 100 | ] | ||
| 3 | [−4, 4] | ||
| 20 | [0, 1] | ||
| 3 | [−5, 5] |
| Functions | Index | Improved SPEA2 | NSGA2 | SPEA2 | SPEA2 + SDE | SPEA |
|---|---|---|---|---|---|---|
| VN (20) | 20 | 20 | 20 | 20 | 20 | |
| TT100% | 1.0 | 1.1 | 7.3 | 0.8 | 10.5 | |
| HV | 0.8934 | 0.8718 | 0.8439 | 0.8792 | 0.7957 | |
| VN (20) | 20 | 20 | 20 | 20 | 20 | |
| TT100% | 1.5 | 1.6 | 9.7 | 1.2 | 14.4 | |
| HV | 0.8859 | 0.8731 | 0.8392 | 0.8917 | 0.8038 | |
| VN (20) | 20 | 20 | 20 | 20 | 20 | |
| TT100% | 1.9 | 1.8 | 15.6 | 1.9 | 21.4 | |
| HV | 0.8126 | 0.7933 | 0.7279 | 0.8018 | 0.6817 | |
| VN (20) | 20 | 20 | 20 | 20 | 20 | |
| TT100% | 2.6 | 2.7 | 24.8 | 2.4 | 35.7 | |
| HV | 0.8596 | 0.7151 | 0.6139 | 0.8638 | 0.5884 | |
| VN (20) | 20 | 20 | 18 | 20 | 12 | |
| TT100% | 21.9 | 26.4 | 96.1 | 20.3 | 183.7 | |
| HV | 0.8394 | 0.7062 | 0.6028 | 0.8045 | 0.4119 | |
| VN (20) | 20 | 20 | 20 | 20 | 20 | |
| TT100% | 7.9 | 8.3 | 41.9 | 8.2 | 67.5 | |
| HV | 0.8783 | 0.8526 | 0.8313 | 0.8617 | 0.8106 | |
| VN (20) | 20 | 20 | 20 | 20 | 20 | |
| TT100% | 25.7 | 28.5 | 136.2 | 24.3 | 207.3 | |
| HV | 0.7908 | 0.7347 | 0.7214 | 0.7705 | 0.7008 | |
| VN (20) | 20 | 20 | 20 | 20 | 20 | |
| TT100% | 3.0 | 2.8 | 17.1 | 2.4 | 37.6 | |
| HV | 0.8769 | 0.8573 | 0.8491 | 0.8707 | 0.8327 | |
| VN (20) | 20 | 20 | 20 | 20 | 20 | |
| TT100% | 11.9 | 13.2 | 50.4 | 10.6 | 118.1 | |
| HV | 0.7839 | 0.7654 | 0.7486 | 0.7792 | 0.7218 |
| Index | Improved SPEA2 | NSGA2 | SPEA2 | SPEA2 + SDE | SPEA |
|---|---|---|---|---|---|
| Generational distance | [1.34 × 10−3, 2.60 × 10−3] | [2.34 × 10−3, 5.43 × 10−3] | [1.09 × 10−2, 1.56 × 10−2] | [1.81 × 10−3, 3.48 × 10−3] | [1.43 × 10−2, 1.92 × 10−2] |
| Spacing | [8.55 × 10−4, 1.93 × 10−3] | [2.00 × 10−3, 3.97 × 10−3] | [3.27 × 10−3, 5.10 × 10−3] | [1.34 × 10−3, 2.60 × 10−3] | [4.40 × 10−3, 6.31 × 10−3] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Fang, X. An Improved Strength Pareto Evolutionary Algorithm 2 with Adaptive Crossover Operator for Bi-Objective Distributed Unmanned Aerial Vehicle Delivery. Mathematics 2023, 11, 3327. https://doi.org/10.3390/math11153327
Song Y, Fang X. An Improved Strength Pareto Evolutionary Algorithm 2 with Adaptive Crossover Operator for Bi-Objective Distributed Unmanned Aerial Vehicle Delivery. Mathematics. 2023; 11(15):3327. https://doi.org/10.3390/math11153327
Chicago/Turabian StyleSong, Yu, and Xi Fang. 2023. "An Improved Strength Pareto Evolutionary Algorithm 2 with Adaptive Crossover Operator for Bi-Objective Distributed Unmanned Aerial Vehicle Delivery" Mathematics 11, no. 15: 3327. https://doi.org/10.3390/math11153327
APA StyleSong, Y., & Fang, X. (2023). An Improved Strength Pareto Evolutionary Algorithm 2 with Adaptive Crossover Operator for Bi-Objective Distributed Unmanned Aerial Vehicle Delivery. Mathematics, 11(15), 3327. https://doi.org/10.3390/math11153327