
Design of Fuzzy and Conventional Controllers for Modeling and Simulation of Urban Traffic Light System with Feedback Control



Abstract
:1. Introduction
2. Design of Fuzzy Controller
| Name = ‘junction1’ |
| Type = ‘mamdani’ |
| Version = 2.0 |
| NumInputs = 2 |
| NumOutputs = 1 |
| NumRules = 9 |
| AndMethod = ‘min’ |
| OrMethod = ‘max’ |
| ImpMethod = ‘min’ |
| AggMethod = ‘max’ |
| DefuzzMethod = ‘centroid’ |
| [Input1] |
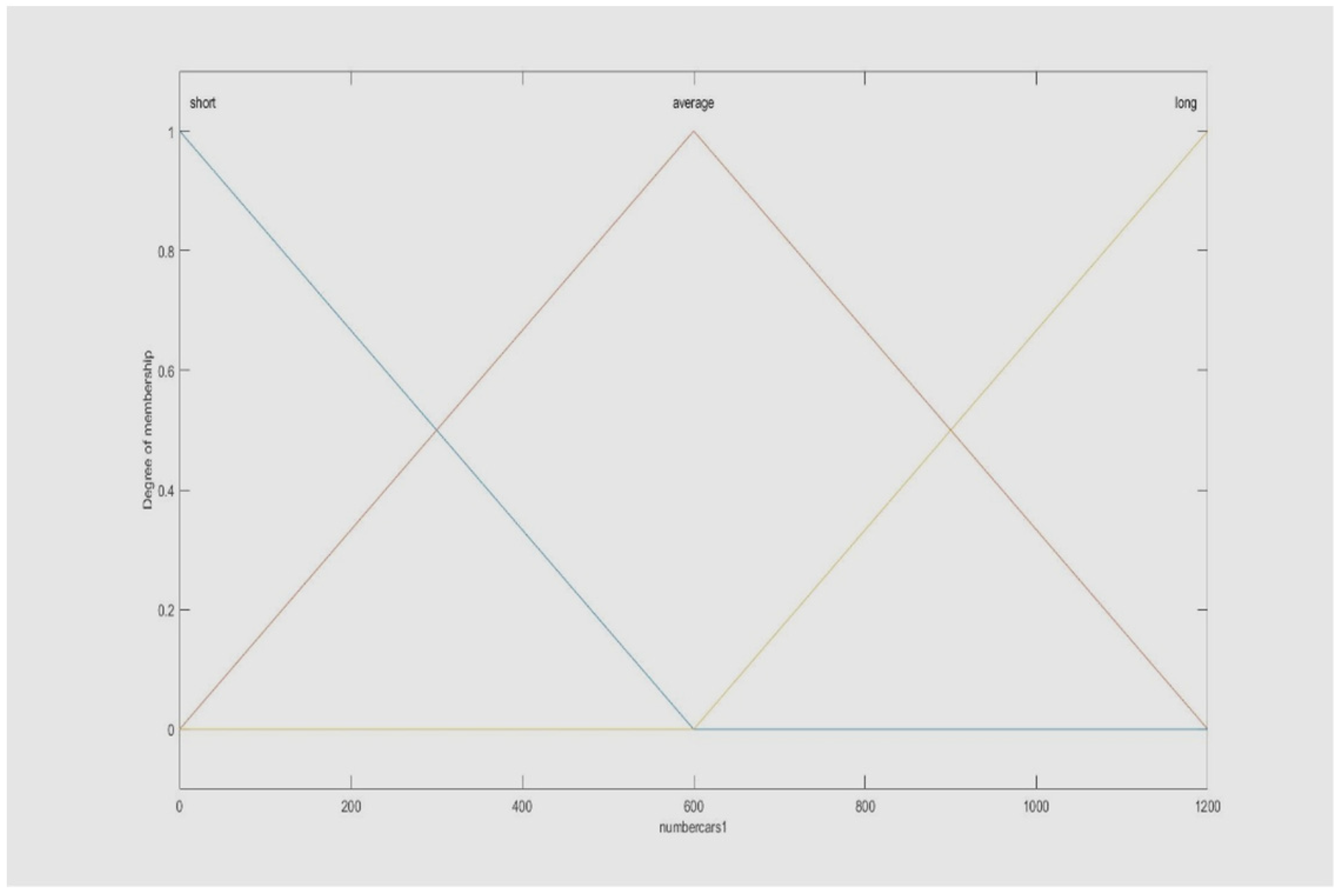
| Name = ‘numbercars1’ |
| Range = [0 1200] |
| NumMFs = 3 |
| MF1 = ‘short’:’trimf’, [0 0 600] |
| MF2 = ‘average’:’trimf’, [0 600 1200] |
| MF3 = ‘long’:’trimf’, [600 1200 1200] |
| [Input2] |
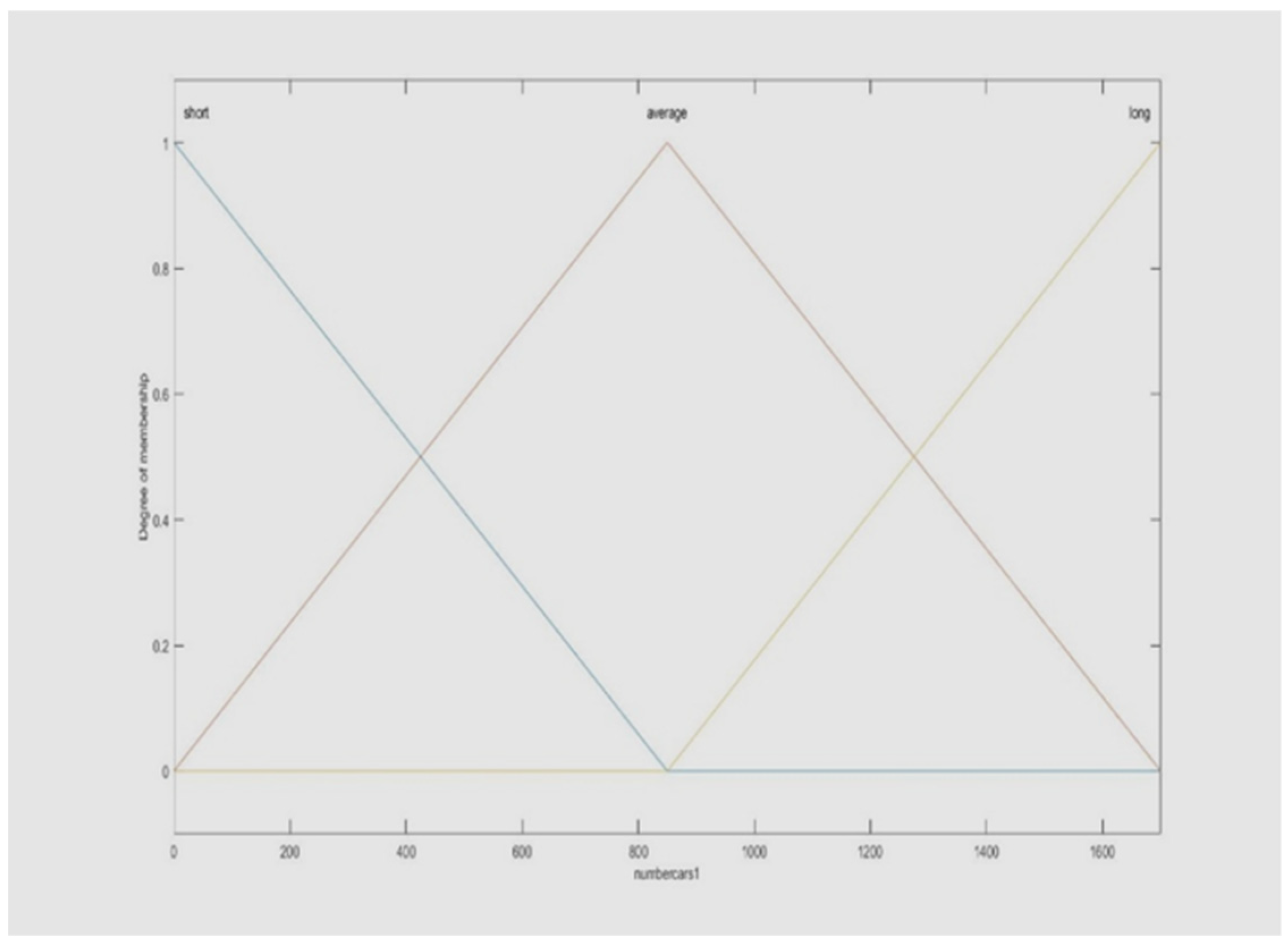
| Name = ‘numbercars2’ |
| Range = [0 900] |
| NumMFs = 3 |
| MF1 = ‘short’:’trimf’, [0 0 450] |
| MF2 = ‘average’:’trimf’, [0 450 900] |
| MF3 = ‘long’:’trimf’, [450 900 900] |
| [Output1] |
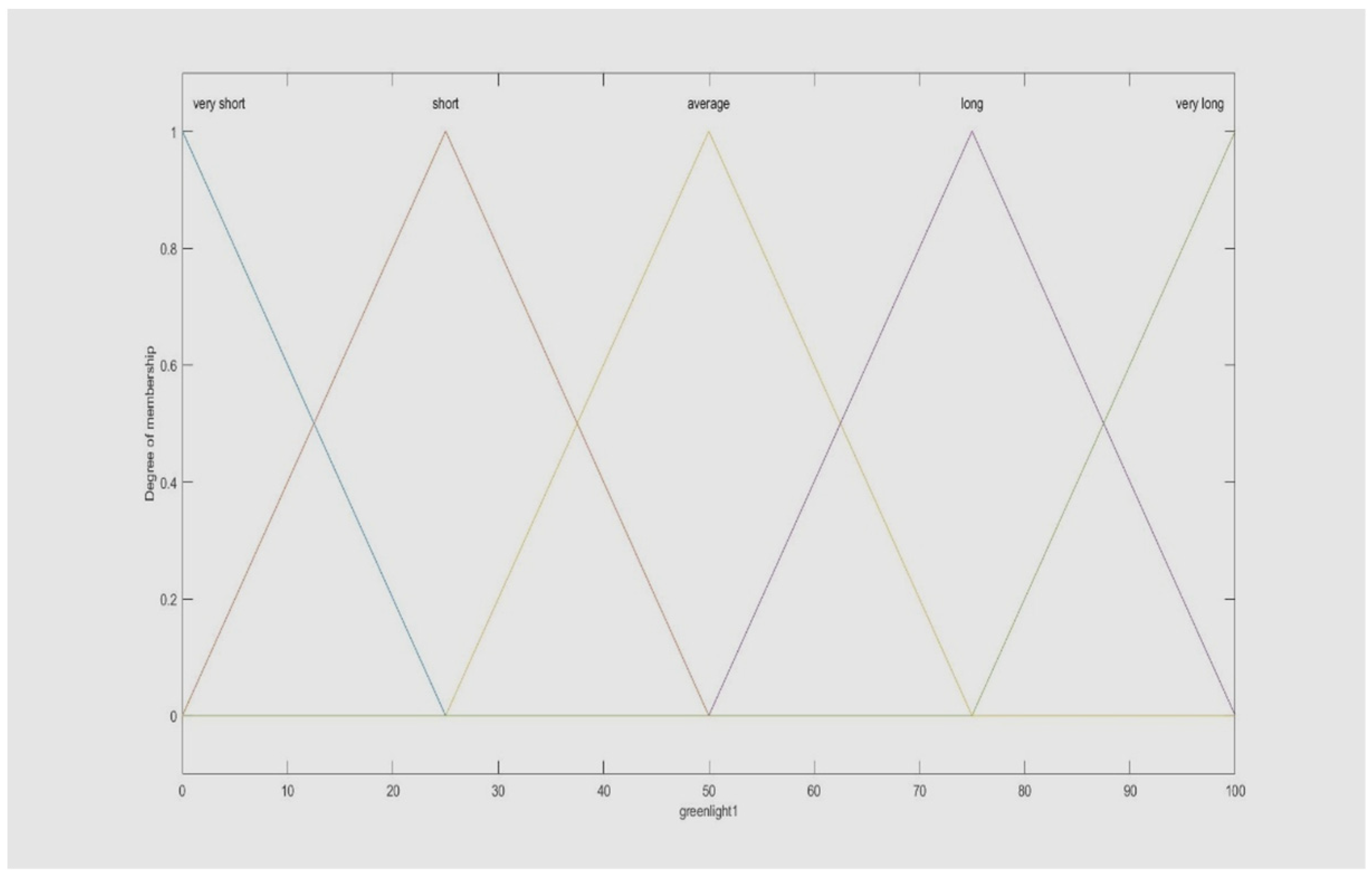
| Name = ‘greenlight1’ |
| Range = [0 100] |
| NumMFs = 5 |
| MF1 = ‘very short’:’trimf’, [0 0 25] |
| MF2 = ‘short’:’trimf’, [0 25 50] |
| MF3 = ‘average’:’trimf’, [25 50 75] |
| MF4 = ‘long’:’trimf’, [50 75 100] |
| MF5 = ‘very long’:’trimf’, [75 100 100] |
| [Rules] |
| 1 1, 3 (1): 1 |
| 1 2, 2 (1): 1 |
| 1 3, 1 (1): 1 |
| 2 1, 4 (1): 1 |
| 2 2, 3 (1): 1 |
| 2 3, 2 (1): 1 |
| 3 1, 5 (1): 1 |
| 3 2, 4 (1): 1 |
| 3 3, 3 (1): 1 |
- If (numbercars1 is short) and (numbercars2 is short) then (greenlight1 is average)
- If (numbercars1 is short) and (numbercars2 is average) then (greenlight1 is short)
- If (numbercars1 is short) and (numbercars2 is long) then (greenlight1 is very short)
- If (numbercars1 is average) and (numbercars2 is short) then (greenlight1 is long)
- If (numbercars1 is average) and (numbercars2 is average) then (greenlight1 is average)
- If (numbercars1 is average) and (numbercars2 is long) then (greenlight1 is short)
- If (numbercars1 is long) and (numbercars2 is short) then (greenlight1 is very long)
- If (numbercars1 is long) and (numbercars2 is average) then (greenlight1 is long)
- If (numbercars1 is long) and (numbercars2 is long) then (greenlight1 is average)
3. Design of Conventional Controller
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lu, J.; Chen, F.; Ma, V. Signal Timing for an Isolated Intersection Based on the Two-Stage Fuzzy Logic Controller. Adv. Eng. Res. 2018, 127, 111–114. [Google Scholar] [CrossRef]
- Murat, S.Y.; Gedizlioglu, E. A fuzzy logic multi-phased signal control model for isolated junctions. Transp. Res. Part C Emerg. Technol. 2005, 13, 19–36. [Google Scholar] [CrossRef]
- Dobrota, N.; Mitrovic, N.; Gavric, S.; Stevanovic, A. Comprehensive Data Analysis Approach for Appropriate Scheduling of Signal Timing Plans. Future Transp. 2022, 2, 27. [Google Scholar] [CrossRef]
- Liao, Z.; Xiao, H.; Liu, S.; Liu, Y.; Yi, A. Impact Assessing of Traffic Lights via GPS Vehicle Trajectories. ISPRS Int. J. Geo-Inf. 2021, 10, 769. [Google Scholar] [CrossRef]
- Alemdar, K.D.; Tortum, A.; Kaya, Ö.; Atalay, A. Interdisciplinary Evaluation of Intersection Performances—A Microsimulation-Based MCDA. Sustainability 2021, 13, 1859. [Google Scholar] [CrossRef]
- Rahmani, A.M.; Naqvi, R.A.; Yousefpoor, E.; Yousefpoor, M.S.; Ahmed, O.H.; Hosseinzadeh, M.; Siddique, K. A Q-Learning and Fuzzy Logic-Based Hierarchical Routing Scheme in the Intelligent Transportation System for Smart Cities. Mathematics 2022, 10, 4192. [Google Scholar] [CrossRef]
- Elbaum, Y.; Novoselsky, A.; Kagan, E. A Queueing Model for Traffic Flow Control in the Road Intersection. Mathematics 2022, 10, 3997. [Google Scholar] [CrossRef]
- Pavlova, K.; Stoilov, T.; Stoilova, K. Bi-level model for public rail transportation under incomplete data. J. Cybern. Inf. Technol. 2017, 17, 75–91. [Google Scholar] [CrossRef] [Green Version]
- Stoilova, K.; Stoilov, T. Bi-level optimizatio application for urban traffic management. Annals of Computer science and Information Systems. In Proceedings of the 2020 Federated Conference on Computer Science and Information Systems, Sofia, Bulgaria, 6–9 September 2020; Volume 21, pp. 327–336. [Google Scholar] [CrossRef]
- Trichkova-Kashamova, E. Modeling and optimization of traffic flows in a network. Proceedings of International Conference Automatics and Informatics—ICAI, Varna, Bulgaria, 1–3 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Lee, J.-H.; Lee, K.-M.; Lee-Kwang, H. Fuzzy controller for intersection group. In Proceedings of the IEEE Conference on Industrial Automation and Control Emerging Technology Applications, Taipei, Taiwan, 22–27 May 1995; IEEE Xplore: Piscataway, NJ, USA, 2002; pp. 376–382. [Google Scholar] [CrossRef]
- Yulianto, B. Application of fuzzy logic to traffic signal control under mixed traffic conditions. Traffic Eng. Control 2003, 44, 332–336. [Google Scholar]
- Papageorgiou, M.; Diakaki, C.; Dinopoulou, V.; Kotsialos, A.; Wang, Y. Review of road traffic control strategies. Proc. IEEE 2003, 91, 2043–2067. [Google Scholar] [CrossRef] [Green Version]
- Papageorgiou, M.; Kotsialos, A. Freeway ramp metering: An overview. IEEE Trans. Intell. Transp. Syst. 2003, 3, 271–281. [Google Scholar] [CrossRef]
- Azarafza, M.; Akgün, H.; Feizi-Derakhshi, M.; Azarafza, M.; Rahnamarad, J.; Derakhshani, R. Discontinuous rock slope stability analysis under blocky structural sliding by fuzzy key-block analysis method. Heliyon 2020, 6, e03907. [Google Scholar] [CrossRef] [PubMed]
- Azarafza, M.; Asghari-Kaljahi, E.; Ghazifard, A.; Akgün, H. Application of fuzzy expert decision-making system for rock slope block-toppling modeling and assessment: A case study. Model. Earth Syst. Environ. 2021, 7, 159–168. [Google Scholar] [CrossRef]
- Fuzzy Logic Toolbox—MATLAB. Available online: www.mathworks.com (accessed on 22 November 2022).
- Boneva, Y.; Vatchova, B.; Gegov, A. Fuzzy Control of Traffic Junctions in Oversaturated Urban Networks. Proceedings of IFAC Workshop on Control for Smart Cities—CSC 2022, Sozopol, Bulgaria, 27–30 June 2022; IFAC: New York, NY, USA, 2022; Volume 55, pp. 144–149. [Google Scholar] [CrossRef]
- Vatchova, B.; Mo, A.; Boneva, Y.; Gegov, A. Fuzzy Control of Traffic Junctions in Undersaturated Urban Networks. In Proceedings of the IEEE International Black Sea Conference on Communications and Networking—IEEE BlackSeaCom 2022, Sofia, Bulgaria, 6–9 June 2022; IEEE Xplore: Piscataway, NJ, USA, 2022; pp. 96–101. [Google Scholar] [CrossRef]
- Gegov, A. Distributes Fuzzy Control of Multivariable Systems; International Series in Intelligent Technologies (ISIT); Springer: Berlin/Heidelberg, Germany, 1996; Volume 6, pp. 1–186. ISBN 978-94-015-8640-5. [Google Scholar] [CrossRef] [Green Version]
- Gegov, A. Complexity Management in Fuzzy Systems; Studies in Fuzziness and Soft Computing (STUDFUZZ); Springer: Berlin/Heidelberg, Germany, 2007; Volume 211, pp. 1–249. ISBN 978-3-540-38885-2. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation in AIMSUN (Iteration Number) | Fuzzy Controller (Number of Vehicles per Hour) | Green Light Duration (Seconds) | Simulation in AIMSUN for Conventional Controller (Number of Vehicles per Hour) | Green Light Duration (Seconds) | ||||
|---|---|---|---|---|---|---|---|---|
| e1 | e2 | u1 | u2 | e1 | e2 | u1 | u2 | |
| 1 | 1200 | 900 | 50 | 50 | 1200 | 900 | 57 | 43 |
| 2 | 1125 | 1125 | 62 | 38 | 1125 | 572 | 66 | 34 |
| 3 | 1125 | 572 | 62 | 38 | 1125 | 572 | 66 | 34 |
| Simulation in AIMSUN (Iteration Number) | Fuzzy Controller (Number of Vehicles per Hour) | Green Light Duration (Seconds) | Simulation in AIMSUN for Conventional Controller (Number of Vehicles per Hour) | Green Light Duration (Seconds) | ||||
|---|---|---|---|---|---|---|---|---|
| e1 | e2 | u1 | u2 | e1 | e2 | u1 | u2 | |
| 1 | 1700 | 210 | 50 | 50 | 1700 | 210 | 89 | 11 |
| 2 | 1723 | 625 | 50 | 50 | 1179 | 332 | 78 | 22 |
| 3 | 1723 | 625 | 50 | 50 | 1721 | 610 | 74 | 26 |
| 4 | 1723 | 625 | 50 | 50 | 1720 | 631 | 73 | 27 |
| 5 | 1723 | 625 | 50 | 50 | 1720 | 631 | 73 | 27 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vatchova, B.; Boneva, Y. Design of Fuzzy and Conventional Controllers for Modeling and Simulation of Urban Traffic Light System with Feedback Control. Mathematics 2023, 11, 373. https://doi.org/10.3390/math11020373
Vatchova B, Boneva Y. Design of Fuzzy and Conventional Controllers for Modeling and Simulation of Urban Traffic Light System with Feedback Control. Mathematics. 2023; 11(2):373. https://doi.org/10.3390/math11020373
Chicago/Turabian StyleVatchova, Boriana, and Yordanka Boneva. 2023. "Design of Fuzzy and Conventional Controllers for Modeling and Simulation of Urban Traffic Light System with Feedback Control" Mathematics 11, no. 2: 373. https://doi.org/10.3390/math11020373
APA StyleVatchova, B., & Boneva, Y. (2023). Design of Fuzzy and Conventional Controllers for Modeling and Simulation of Urban Traffic Light System with Feedback Control. Mathematics, 11(2), 373. https://doi.org/10.3390/math11020373