
Smart Traffic Shaping Based on Distributed Reinforcement Learning for Multimedia Streaming over 5G-VANET Communication Technology



Abstract
:
1. Introduction
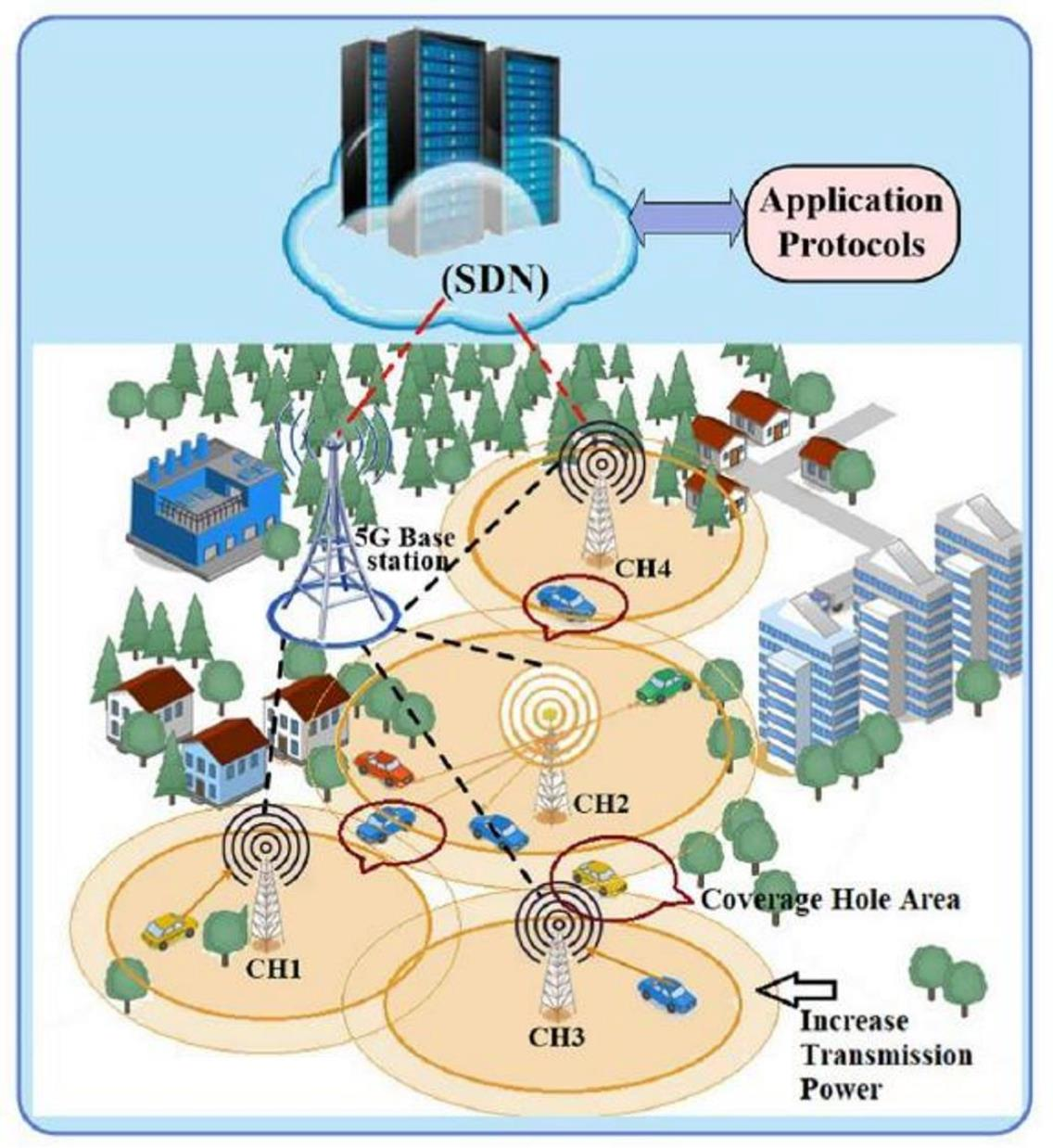
1.1. VANET Based on 5G
1.2. Traffic Shaping over 5G-VANET
1.3. Problem Statement and Research Motivation
1.4. Research Contribution
- This paper proposes a smart real-time multimedia traffic shaping mechanism based on distributed reinforcement learning that will be applicable for the 5G-VANET. The idea of using distributed reinforcement learning in real-time traffic shaping is a novel idea since the task of traffic shaping will be distributed among RSU, vehicles, and mobile devices.
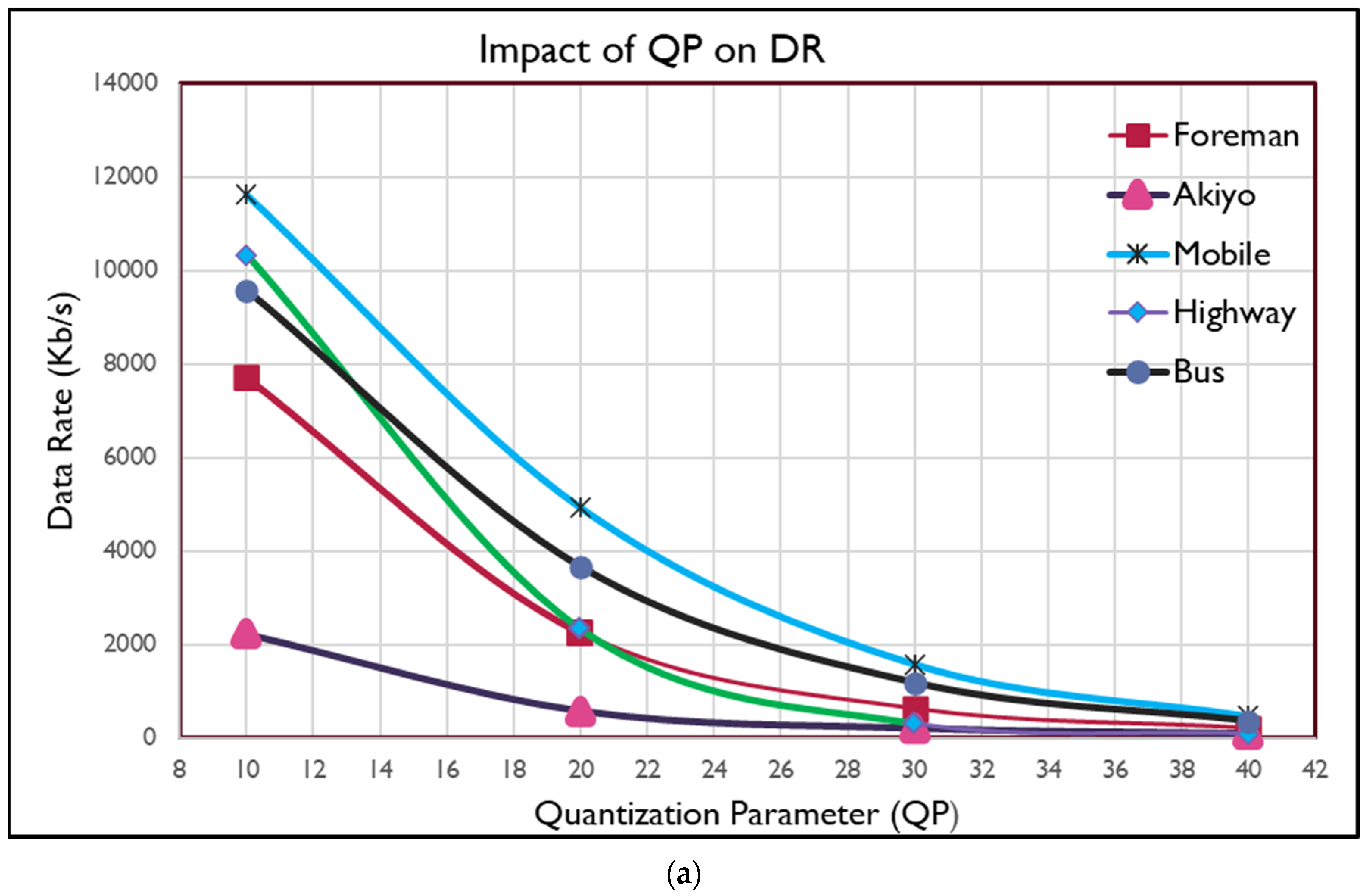
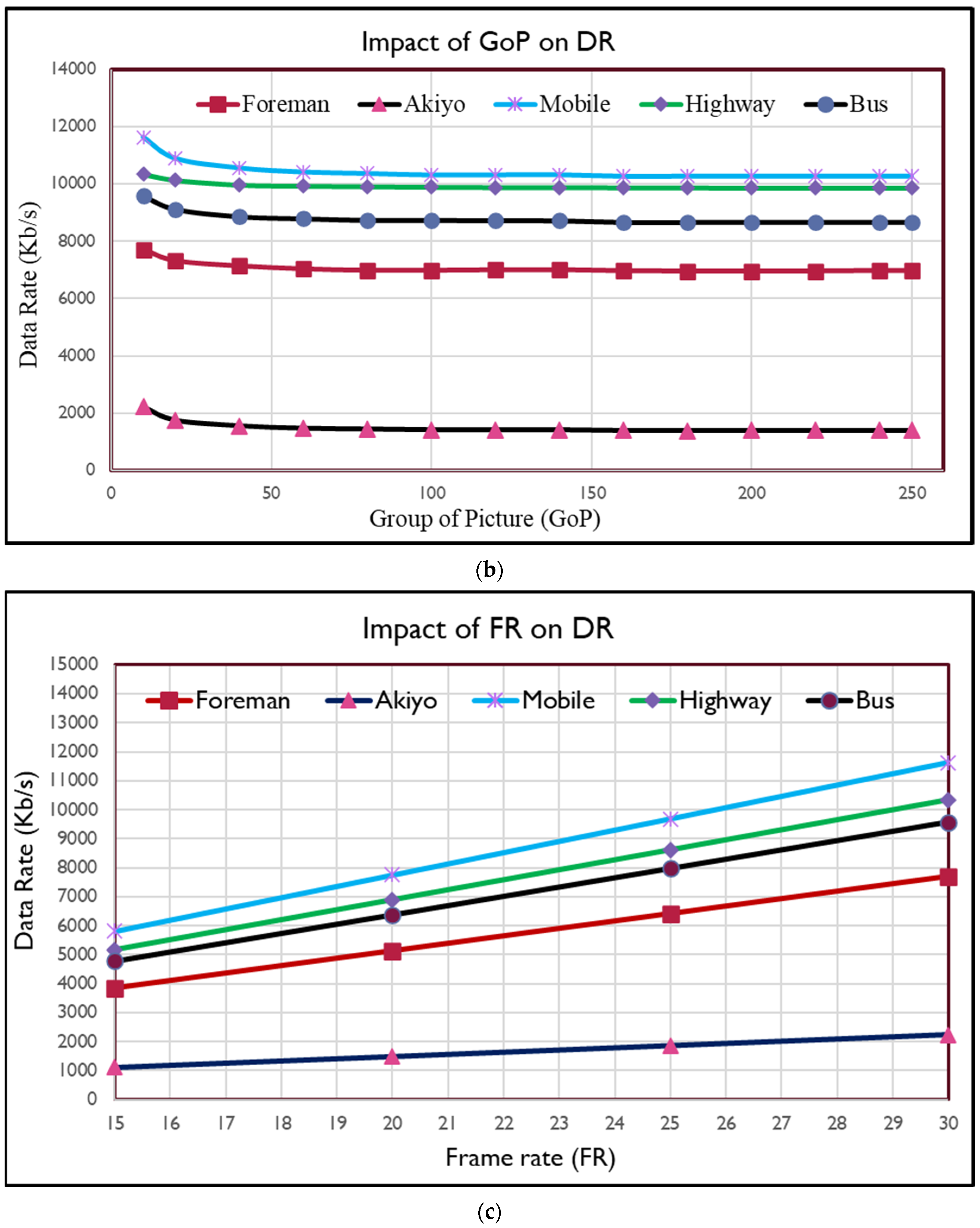
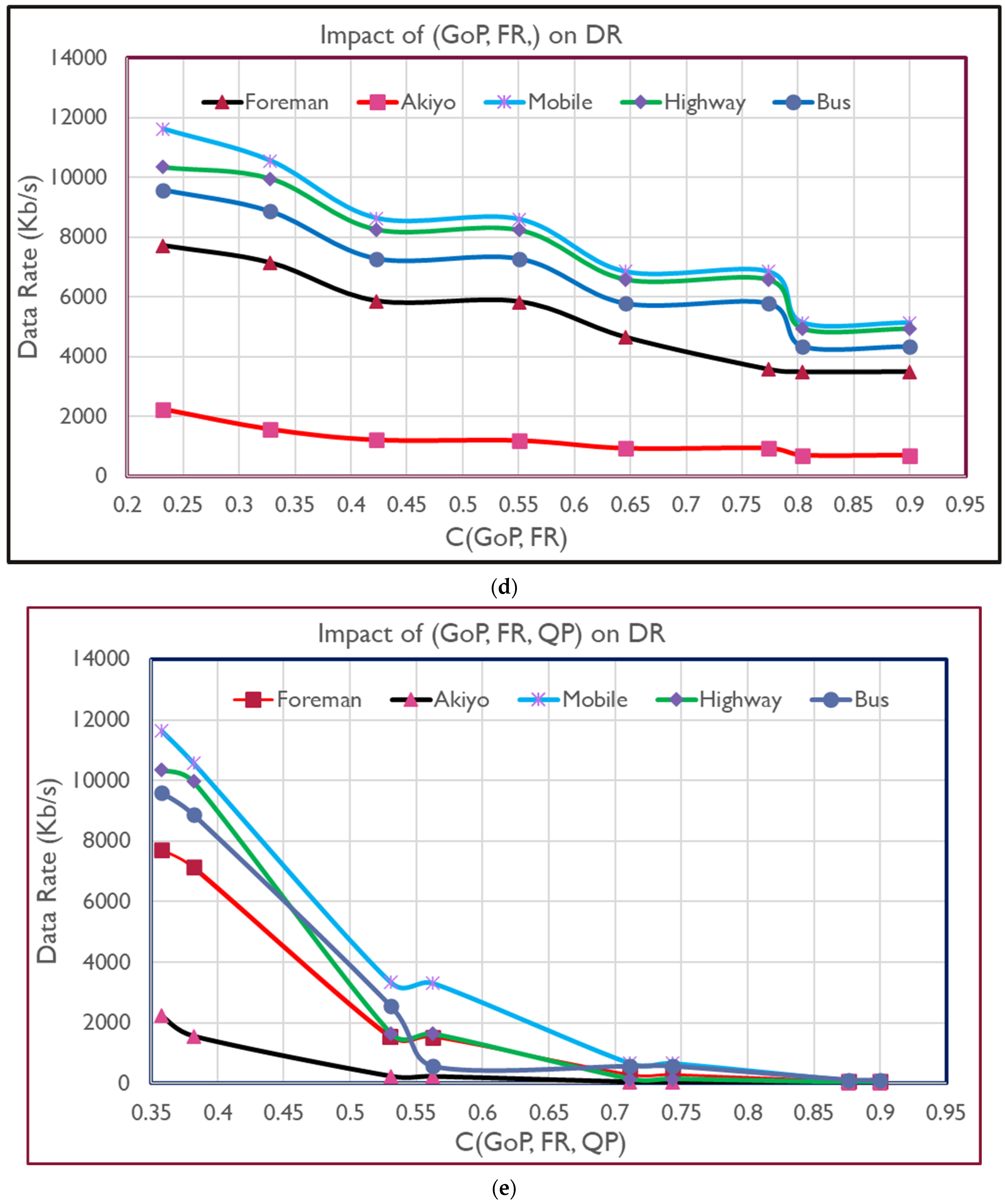
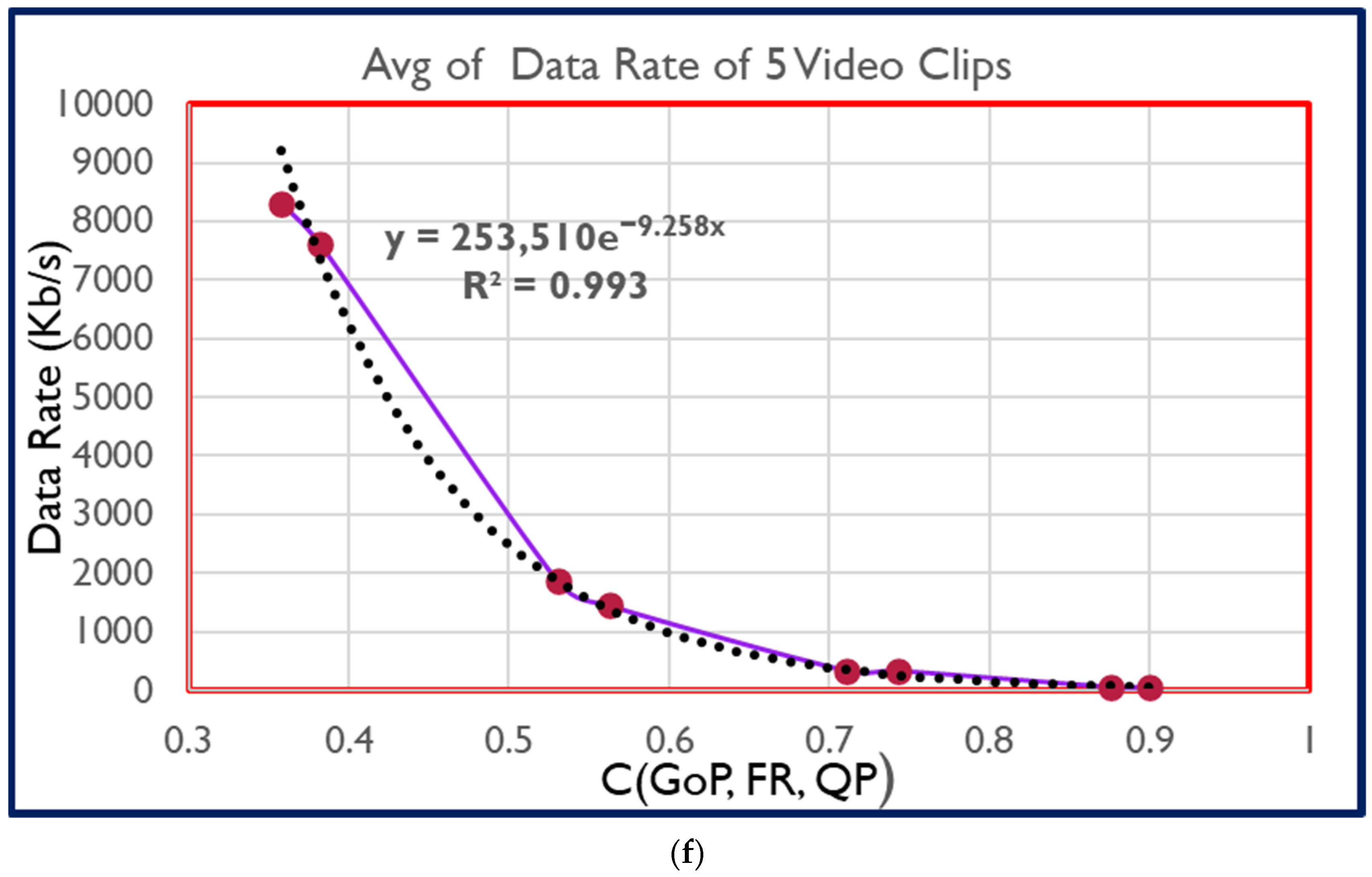
- It comprehensively studies the impact of adapting the three parameters of video coding (QP, GOP, FR) on achieving the optimal traffic rate value for real-time multimedia streaming on the 5G-VANET which will increase the fidelity criteria and reduce the video bitrate with a high quality.
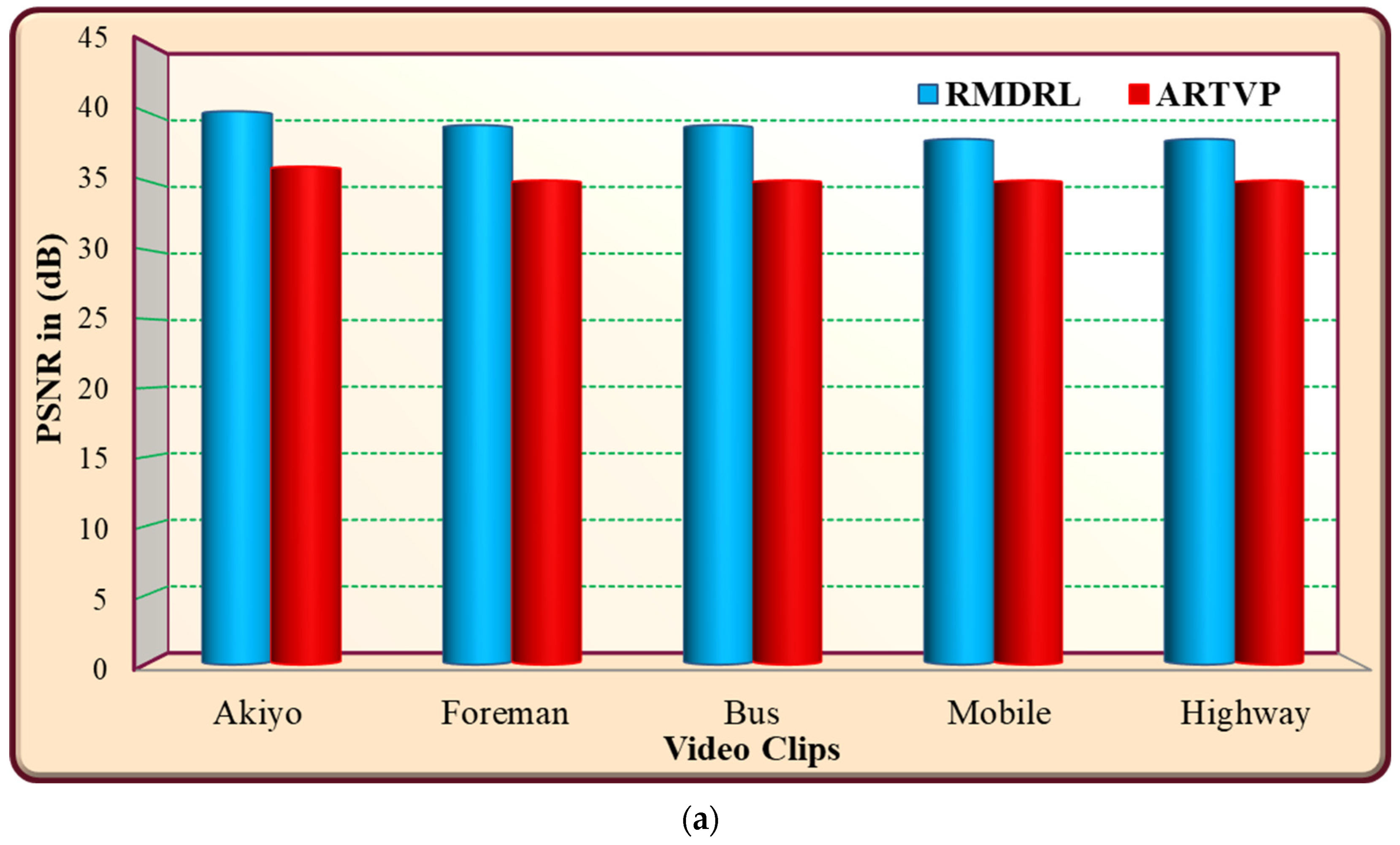
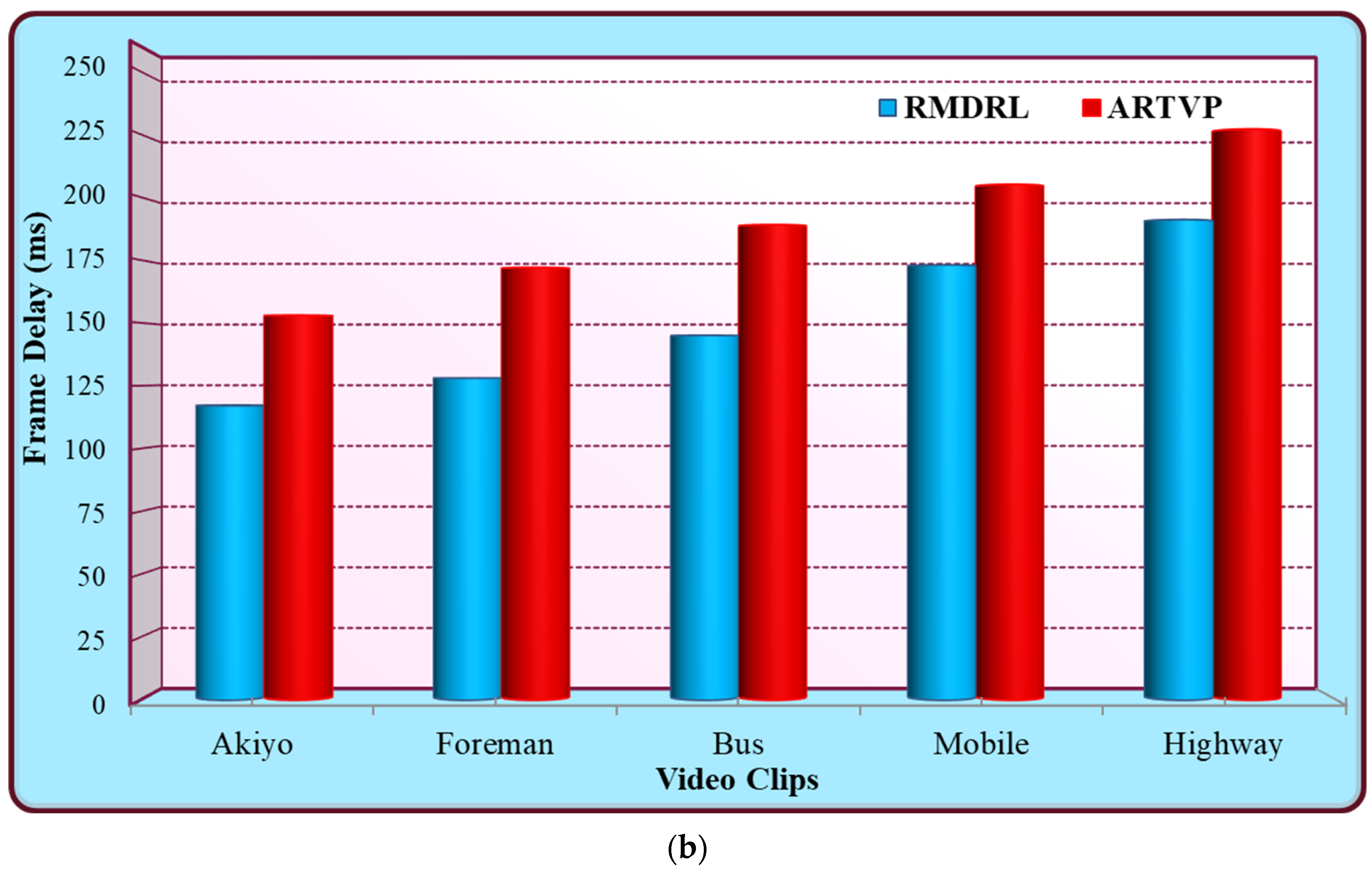
- The proposed mechanism provides a high QoE in terms of the PSNR, and it also ensures short frame latency.
2. Related Works on Traffic Shaping
3. System Design of Smart Traffic Shaping
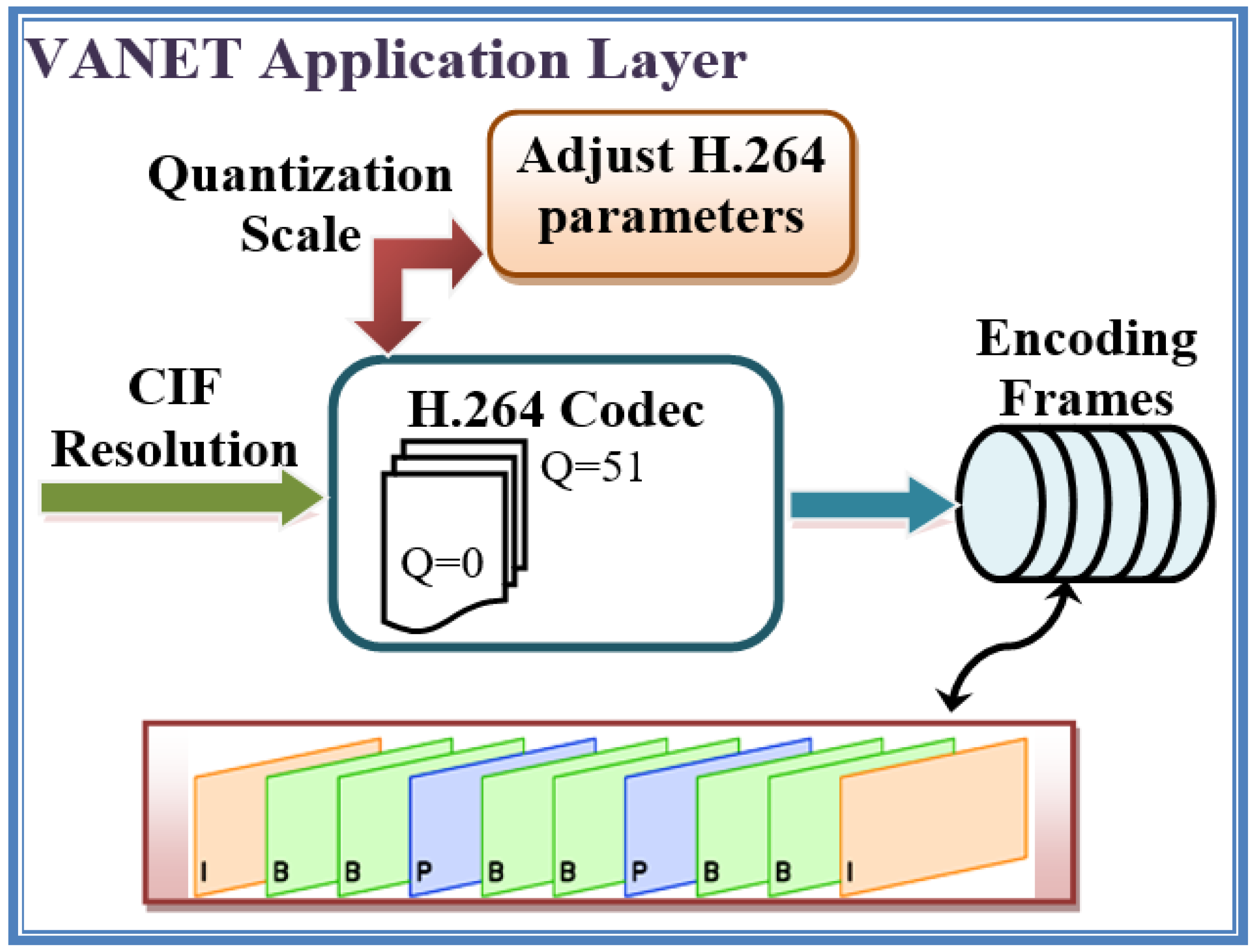
3.1. Multimedia Encoding Model
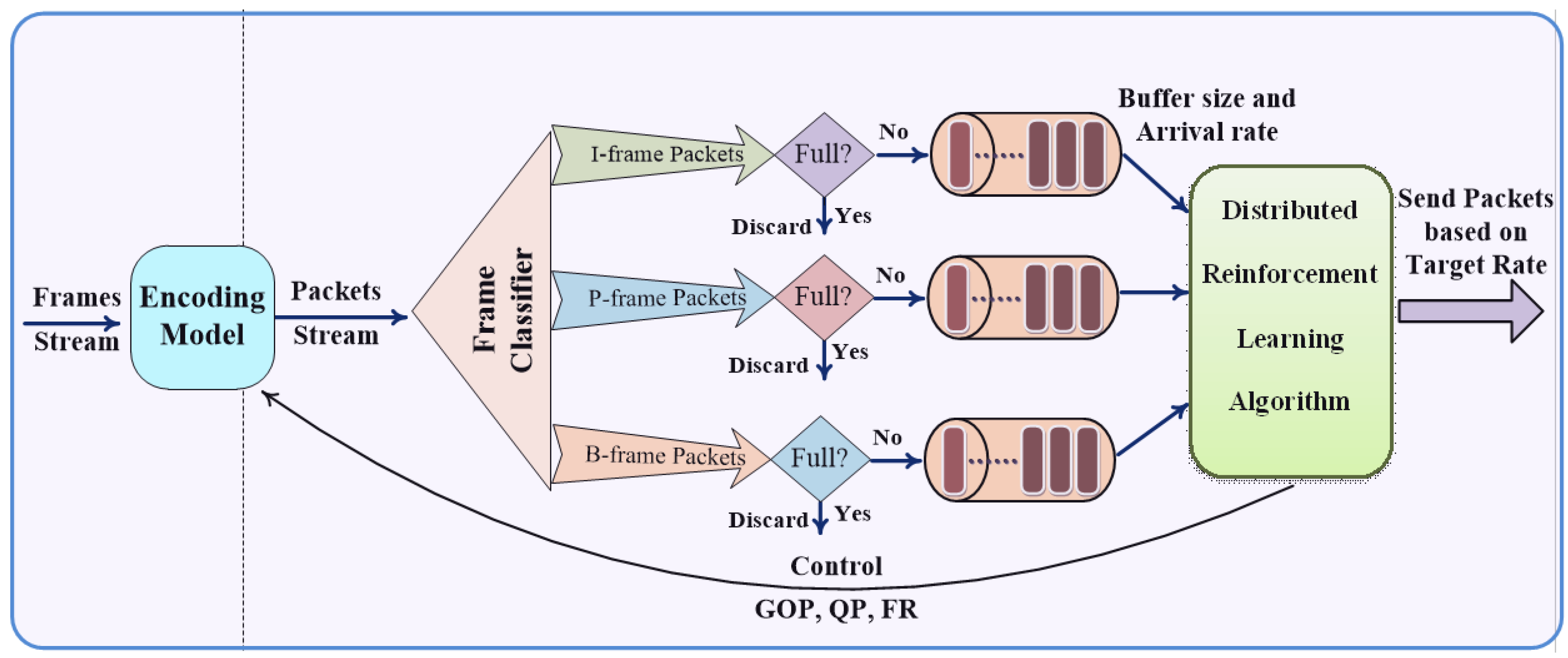
3.2. Traffic Shaping Model Based on DRL
3.3. Real-Time Routing Protocol
| Algorithm 1: RMDRL pseudocode | |
| Input: Video clip, Available Bitrate (BR), Learning rate (α), Learning episodes number (n), QP, GOP, FR. | |
| Output: High fidelity of the reconstructed video at the receiver. | |
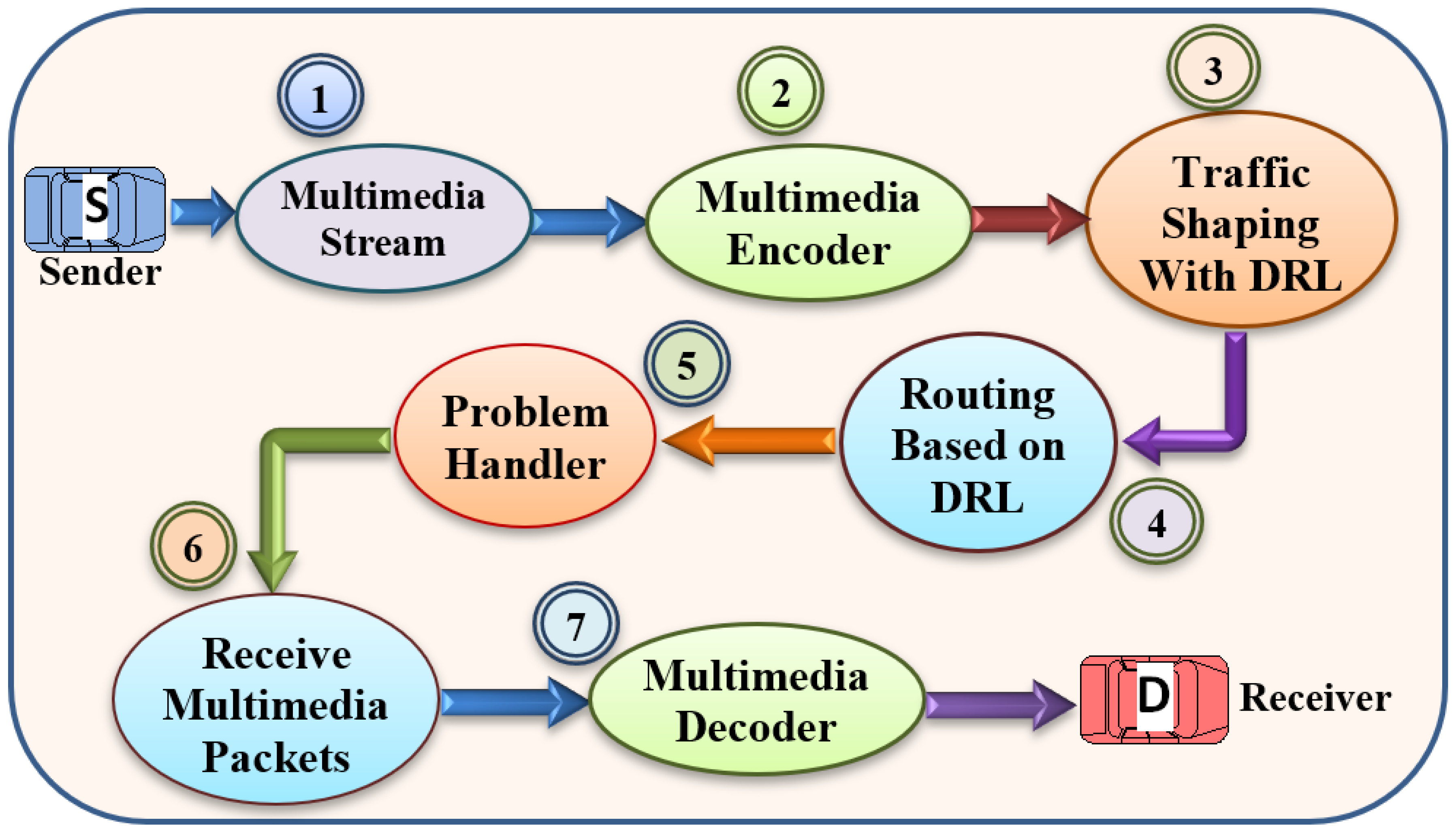
| Start Algorithm (RMDRL) | |
| Phase 1, Multimedia Stream | |
| 1 | | While (new multimedia session start) do |
| 2 | | Get the vehicle Addresses (); //the source and destination IP address |
| 3 | | Create the real-time multimedia steam (); //The video stream should be converted to MP4 |
| Phase 2, Multimedia Encoder | |
| 4 | | Get video clip(); |
| 5 | | Adjust H.264 Encoder Parameters as shown in Table 1 (); |
| 6 | | Initialize (GOP, FR, QP); |
| 7 | | Initialize Real-time Routing Protocol (); |
| 8 | | Create video data traffic files using x.264 and mp4trace();//Trace file contains three types of packet I, P, and B. |
| Phase 3, Traffic Shaping with DRL | |
| 9 | | Initialize Q-Table: Q(s,a) = 0 for ∀s ∈ S, ∀a ∈ A (GOP, FR, QP); |
| 10 | | for episode ← 1 to n do; |
| 11 | | Chose action at a given state s and calculate C(GOP, FR, QP) according to Equation (5); |
| 12 | | |
| 13 | | Move to next State S; |
| 14 | | end; |
| 15 | | Adjust the value of (GOP, FR, QP) based on the output of DRL;//as shown in Figure 4 |
| Phase 4, Real-time Routing Protocol | |
| 16 | | Forward I frame packets (); |
| 17 | | Forward P frame packets (); |
| 18 | | Forward B frame packets (); |
| Phase 5, Problem Handler | |
| 19 | | Solve Routing Problem (); |
| 20 | | End;//While loop |
| Phase 6, Receive Multimedia Packets | |
| 21 | | Receive all packets at the destination (); |
| Phase 7, Mutimeia Decoder and Performance Evaluation | |
| 22 | | Reconstruct the video clip (); |
| 23 | | Calculate PSNR and Frame Delay (); //QoE evaluation |
| 24 | End;//Algorithm |
4. Simulation Experiments and Performance Evaluation
4.1. Impact of Video Coding on Traffic Shaping
- Results and Discussion
4.2. Performance Evaluation of RMDRL
- Results and Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bentaleb, A.; Taani, B.; Begen, A.C.; Timmerer, C.; Zimmermann, R. A survey on bitrate adaptation schemes for streaming media over HTTP. IEEE Commun. Surv. Tutor. 2018, 21, 562–585. [Google Scholar] [CrossRef]
- Ahmed, A.A.; Alzahrani, A.A. A comprehensive survey on handover management for vehicular ad hoc network based on 5G mobile networks technology. Trans. Emerg. Telecommun. Technol. 2019, 30, e3546. [Google Scholar] [CrossRef]
- Taha, M.; Ali, A.; Lloret, J.; Gondim, P.R.; Canovas, A. An automated model for the assessment of QoE of adaptive video streaming over wireless networks. Multimed. Tools Appl. 2021, 80, 26833–26854. [Google Scholar] [CrossRef]
- Alam, M.F.; Atiquzzaman, M.; Karim, M.A. Traffic shaping for MPEG video transmission over the next generation internet. Comput. Commun. 2000, 23, 1336–1348. [Google Scholar] [CrossRef] [Green Version]
- Trestian, R.; Comsa, I.S.; Tuysuz, M.F. Seamless multimedia delivery within a heterogeneous wireless networks environment: Are we there yet? IEEE Commun. Surv. Tutor. 2018, 20, 945–977. [Google Scholar] [CrossRef] [Green Version]
- Vega, M.T.; Perra, C.; Liotta, A. Resilience of video streaming services to network impairments. IEEE Trans. Broadcast. 2018, 64, 220–234. [Google Scholar] [CrossRef] [Green Version]
- Barakabitze, A.A.; Walshe, R. SDN and NFV for QoE-driven multimedia services delivery: The road towards 6G and beyond networks. Comput. Netw. 2022, 214, 109133. [Google Scholar] [CrossRef]
- Uzakgider, T.; Cetinkaya, C.; Sayit, M. Learning-based approach for layered adaptive video streaming over SDN. Comput. Netw. 2015, 92, 357–368. [Google Scholar] [CrossRef]
- Hossain, M.B.; Wei, J. Reinforcement Learning-Driven QoS-Aware Intelligent Routing for Software-Defined Networks. In Proceedings of the 2019 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Ottawa, ON, Canada, 11–14 November 2019; pp. 1–5. [Google Scholar]
- Rekkas, V.P.; Sotiroudis, S.; Sarigiannidis, P.; Wan, S.; Karagiannidis, G.K.; Goudos, S.K. Machine Learning in Beyond 5G/6G Networks—State-of-the-Art and Future Trends. Electronics 2021, 10, 2786. [Google Scholar] [CrossRef]
- Nassef, O.; Sun, W.; Purmehdi, H.; Tatipamula, M.; Mahmoodi, T. A survey: Distributed Machine Learning for 5G and beyond. Comput. Netw. 2022, 207, 108820. [Google Scholar] [CrossRef]
- Kaur, J.; Khan, M.A.; Iftikhar, M.; Imran, M.; Haq, Q.E.U. Machine Learning Techniques for 5G and Beyond. IEEE Access 2021, 9, 23472–23488. [Google Scholar] [CrossRef]
- Karunathilake, T.; Förster, A. A Survey on Mobile Road Side Units in VANETs. Vehicles 2022, 4, 482–500. [Google Scholar] [CrossRef]
- Hsieh, Y.L.; Wang, K. Dynamic overlay multicast for live multimedia streaming in urban VANETs. Comput. Netw. 2012, 56, 3609–3628. [Google Scholar] [CrossRef]
- Nakano, T.; Nakagawa, R.; Yamai, N. Mitigating Congestion with Decentralized Traffic Shaping for Adaptive Video Streaming over ICN. In Proceedings of the 17th Asian Internet Engineering Conference, Hiroshima, Japan, 19–21 December 2022; pp. 36–43. [Google Scholar]
- Kua, J.; Armitage, G.; Branch, P. A survey of rate adaptation techniques for dynamic adaptive streaming over HTTP. IEEE Commun. Surv. Tutor. 2017, 19, 1842–1866. [Google Scholar] [CrossRef]
- Anand, D.; Togou, M.A.; Muntean, G.M. A Machine Learning Solution for Automatic Network Selection to Enhance Quality of Service for Video Delivery. In Proceedings of the 2021 IEEE International Symposium on Broadband Multimedia Systems and Broadcasting (BMSB), Chengdu, China, 4–6 August 2021; pp. 1–5. [Google Scholar]
- Lekharu, A.; Moulii, K.; Sur, A.; Sarkar, A. Deep Learning Based Prediction Model for Adaptive Video Streaming. In Proceedings of the 2020 International Conference on COMmunication Systems & NETworkS (COMSNETS), Bangalore, India, 7–11 January 2020; pp. 152–159. [Google Scholar]
- Godfrey, D.; Kim, B.S.; Miao, H.; Shah, B.; Hayat, B.; Khan, I.; Sung, T.E.; Kim, K.I. Q-learning based routing protocol for congestion avoidance. Comput. Mater. Contin. 2021, 68, 3671–3692. [Google Scholar] [CrossRef]
- Gao, Z. 5G Traffic Prediction Based on Deep Learning. Comput. Intell. Neurosci. 2022, 2022, 3174530. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Hu, J.; Min, G.; Zhao, Z.; Chang, Z.; Wang, Z. Spatial-Temporal Cellular Traffic Prediction for 5G and Beyond: A Graph Neural Networks-Based Approach. IEEE Trans. Ind. Inform. 2022, 2022, 2190–2202. [Google Scholar]
- Zhou, S.; Wei, C.; Song, C.; Pan, X.; Chang, W.; Yang, L. Short-Term Traffic Flow Prediction of the Smart City Using 5G Internet of Vehicles Based on Edge Computing. IEEE Trans. Intell. Transp. Syst. 2022, 2022, 1–10. [Google Scholar] [CrossRef]
- Ahmed, A.A. An effective handover management based on SINR and software-defined network over urban vehicular ad hoc networks. Trans. Emerg. Telecommun. Technol. 2019, 30, e3787. [Google Scholar] [CrossRef]
- Ahmed, A.A. A real-time routing protocol with adaptive traffic shaping for multimedia streaming over next-generation of Wireless Multimedia Sensor Networks. Pervasive Mob. Comput. 2017, 40, 495–511. [Google Scholar] [CrossRef]
- Wu, C.; Kumekawa, K.; Kato, T. Distributed reinforcement learning approach for vehicular ad hoc networks. IEICE Trans. Commun. 2010, 93, 1431–1442. [Google Scholar] [CrossRef]
- Shin, K.S.; Hwang, G.H.; Jo, O. Distributed reinforcement learning scheme for environmentally adaptive IoT network selection. Electron. Lett. 2020, 56, 462–464. [Google Scholar] [CrossRef]
- Akbari, Y.; Tabatabaei, S. A new method to find a high reliable route in IoT by using reinforcement learning and fuzzy logic. Wirel. Pers. Commun. 2020, 112, 967–983. [Google Scholar] [CrossRef]
- Rossi, M.; Centenaro, M.; Ba, A.; Eleuch, S.; Erseghe, T.; Zorzi, M. Distributed learning algorithms for optimal data routing in IoT networks. IEEE Trans. Signal Inf. Process. Over Netw. 2020, 6, 179–195. [Google Scholar] [CrossRef]
- Lai, W.K.; Lin, M.T.; Yang, Y.H. A machine learning system for routing decision-making in urban vehicular ad hoc networks. Int. J. Distrib. Sens. Netw. 2015, 11, 374391. [Google Scholar] [CrossRef]
- Immich, R.; Cerqueira, E.; Curado, M. Efficient high-resolution video delivery over VANETs. Wirel. Netw. 2019, 25, 2587–2602. [Google Scholar] [CrossRef]
- Ben Ameur, C.; Mory, E.; Cousin, B. Combining traffic-shaping methods with congestion control variants for HTTP adaptive streaming. Multimed. Syst. 2018, 24, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Al Jameel, M.; Kanakis, T.; Turner, S.; Al-Sherbaz, A.; Bhaya, W.S. A Reinforcement Learning-Based Routing for Real-Time Multimedia Traffic Transmission over Software-Defined Networking. Electronics 2022, 11, 2441. [Google Scholar] [CrossRef]
- Marwah, G.P.K.; Jain, A.; Malik, P.K.; Singh, M.; Tanwar, S.; Safirescu, C.O.; Mihaltan, T.C.; Sharma, R.; Alkhayyat, A. An Improved Machine Learning Model with Hybrid Technique in VANET for Robust Communication. Mathematics 2022, 10, 4030. [Google Scholar] [CrossRef]
- Abdellah, A.R.; Muthanna, A.; Essai, M.H.; Koucheryavy, A. Deep Learning for Predicting Traffic in V2X Networks. Appl. Sci. 2022, 12, 10030. [Google Scholar] [CrossRef]
- Vergados, D.J.; Kralevska, K.; Michalas, A.; Vergados, D.D. Evaluation of HTTP/DASH Adaptation Algorithms on Vehicular Networks. In Proceedings of the 2018 Global Information Infrastructure and Networking Symposium (GIIS), Thessaloniki, Greece, 23–25 October 2018; pp. 1–5. [Google Scholar]
- Esmaeily, A.; Kralevska, K. Small-scale 5G testbeds for network slicing deployment: A systematic review. Wirel. Commun. Mob. Comput. 2021, 2021, 6655216. [Google Scholar] [CrossRef]
- Bitmovin’s Industry Report, Video Developer Report 2021/22. Available online: https://go.bitmovin.com/video-developer-report-2021 (accessed on 20 January 2023).
- Open Source Video Codec. Available online: www.xvid.com/download/ (accessed on 13 September 2022).
- Ahmed, A.A. An optimal complexity H.264/AVC encoding for video streaming over next generation of wireless multimedia sensor networks. Signal Image Video Process. 2016, 10, 1143–1150. [Google Scholar] [CrossRef]
- Watkins, C.J.C.H.; Dayan, P. Q-Learning. Mach. Learn. 1992, 8, 279–292. [Google Scholar] [CrossRef]
- YUV Sequences. Available online: http://trace.eas.asu.edu/yuv/ (accessed on 14 September 2022).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Complexity Parameter | H.264 Configuration Option | Proposed Optimized Value |
|---|---|---|
| Motion Estimation | --me (Dia, Hex, Umh, Esa) | Hex or Dia |
| Quantization parameter (QP) | --qp (0–51) | DRL uses four values 10, 20, 30, and 40 |
| GOP | --keyint (1–250) | DRL uses specific 14 values 10, 20, 40, 80, 100, 120, 140, 160, 180, 200, 200, 220, 240, and 250. |
| Coding-based Adaptive Binary Arithmetic Coding (CABAC) | --no-cabac | Disable |
| Deblock Filter | --no-deblock; --nf | Disable/turn off |
| Rate Distortion Optimization (RDO) | --subme (1–9) | Disable RDO < 6 |
| Chroma Motion Estimation | --no-chroma-me | Disable |
| Frame Rate (FR) | --fps (15–30) | DRL uses four values 15, 20, 25, and 30 |
| Search Range | --merange | 1 |
| Number of Reference Frames | --ref | 1 |
| Video Clip in CIF Resolution (352 × 288) | Number of Frames | Motion Content |
|---|---|---|
| Akiyo | 300 | Low |
| Foreman | 300 | High |
| Highway | 1200 | High |
| Mobile | 300 | High |
| Bus | 300 | Medium |
| Video Clip in CIF Resolution (352 × 288) | ARTVP | RMDRL |
|---|---|---|
| Akiyo |  |  |
| Foreman |  |  |
| Highway |  |  |
| Mobile |  |  |
| Bus |  |  |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, A.A.; Malebary, S.J.; Ali, W.; Barukab, O.M. Smart Traffic Shaping Based on Distributed Reinforcement Learning for Multimedia Streaming over 5G-VANET Communication Technology. Mathematics 2023, 11, 700. https://doi.org/10.3390/math11030700
Ahmed AA, Malebary SJ, Ali W, Barukab OM. Smart Traffic Shaping Based on Distributed Reinforcement Learning for Multimedia Streaming over 5G-VANET Communication Technology. Mathematics. 2023; 11(3):700. https://doi.org/10.3390/math11030700
Chicago/Turabian StyleAhmed, Adel A., Sharaf J. Malebary, Waleed Ali, and Omar M. Barukab. 2023. "Smart Traffic Shaping Based on Distributed Reinforcement Learning for Multimedia Streaming over 5G-VANET Communication Technology" Mathematics 11, no. 3: 700. https://doi.org/10.3390/math11030700
APA StyleAhmed, A. A., Malebary, S. J., Ali, W., & Barukab, O. M. (2023). Smart Traffic Shaping Based on Distributed Reinforcement Learning for Multimedia Streaming over 5G-VANET Communication Technology. Mathematics, 11(3), 700. https://doi.org/10.3390/math11030700