
A Switching Mode Control Scheme for the Hovering Control of Quadrotor Unmanned Aerial Vehicles


Abstract
:1. Introduction
1.1. Background and Motivations
1.2. Literature Review
1.3. Contribution
- (1)
- The position and attitude control of the QUAV achieve simultaneous stability. Different from the article [30], which only achieves the asymptotic stabilization of the position and yaw angle four-state control error system, the algorithm designed in this paper can completely control the configuration of the QUAV so as to realize hovering in a finite time at the equilibrium point that can be simultaneously stabilized.
- (2)
- A novel switching mode control algorithm is designed. Compared with the work in [31], which only analyzes the position and attitude subsystems separately, this paper not only analyzes the overall system control process in detail but also realizes the full-state control of the position and attitude to the target posture.
- (3)
- To avoid a crash, the altitude change of the QUAV during the whole flight control process is analyzed in detail. The second-order differentiable fixed-time control algorithm with constraints is designed in the position loop to avoid the crash effectively.
1.4. Paper Organization
2. Model Description and Problem Formulation
2.1. Model of QUAVs
2.2. Problem Formulation
3. Controller Design and Stability Analysis
3.1. Controller Design of the Position Subsystem
- (i)
- The states , and all stay in the sets Ω for any , respectively.
- (ii)
- The position error is regulated to zero in a fixed settling time T.
3.2. Controller Design of the Attitude Subsystem
3.3. Switching the Control Law for the Full Closed Loop
4. Simulation Results
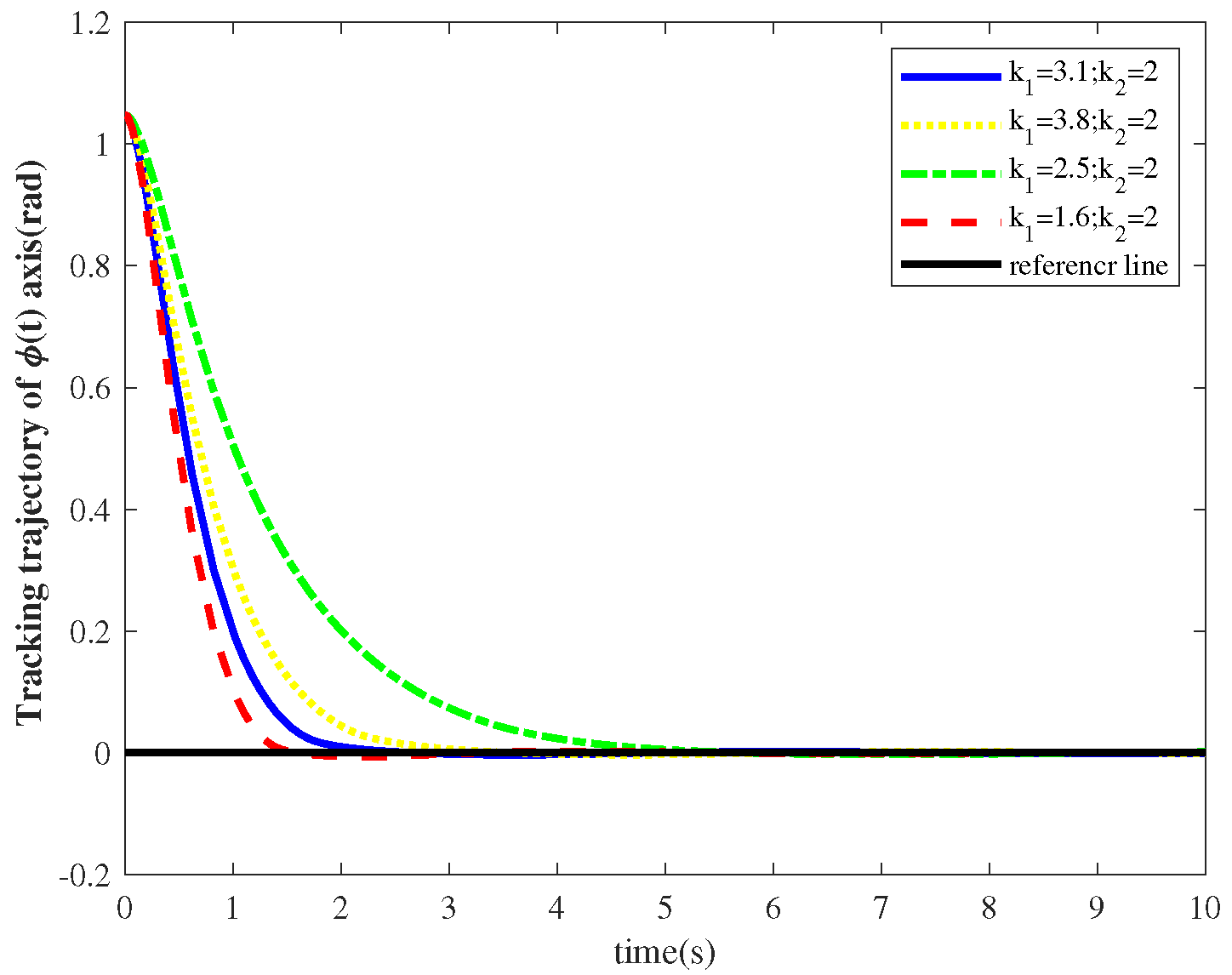
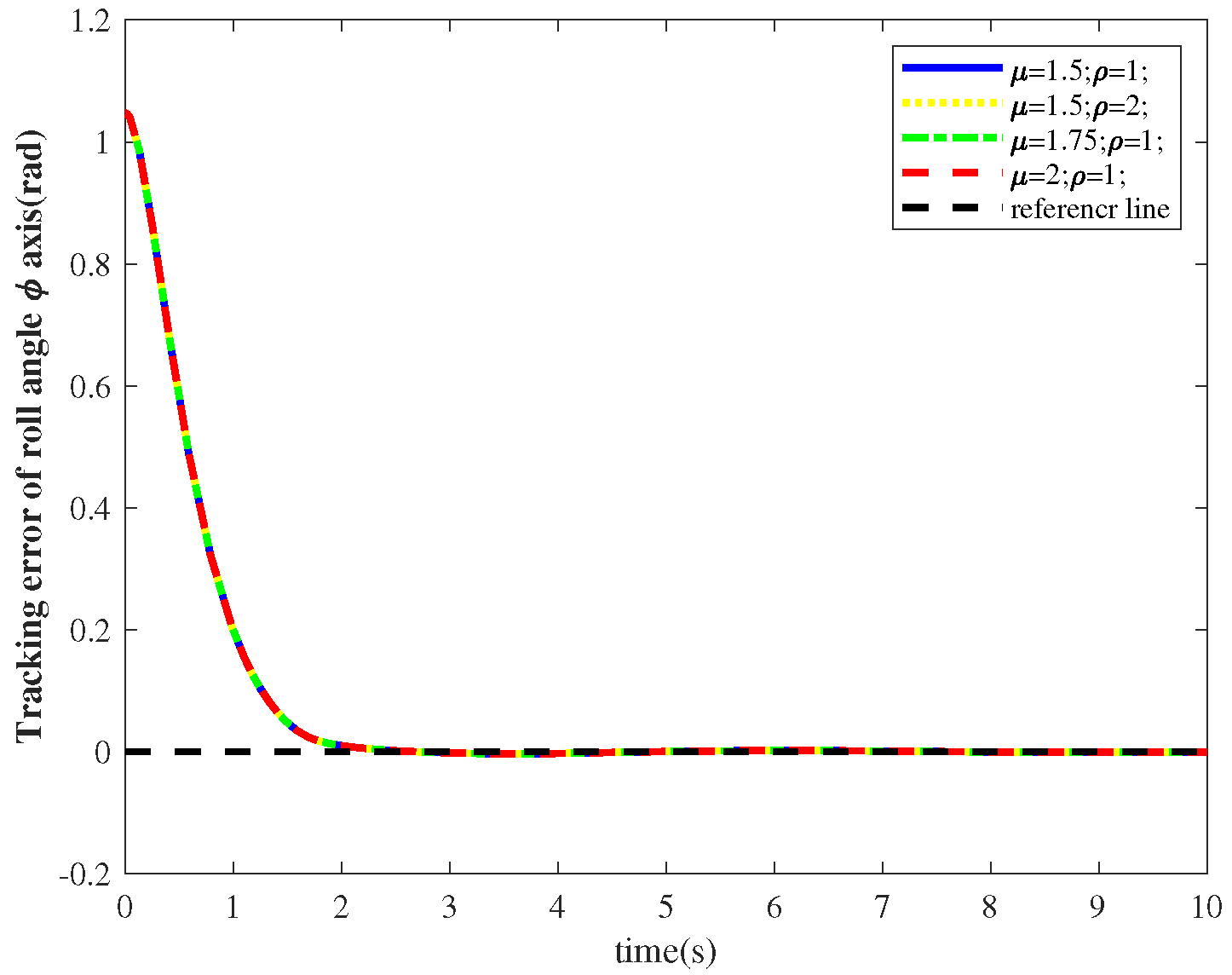
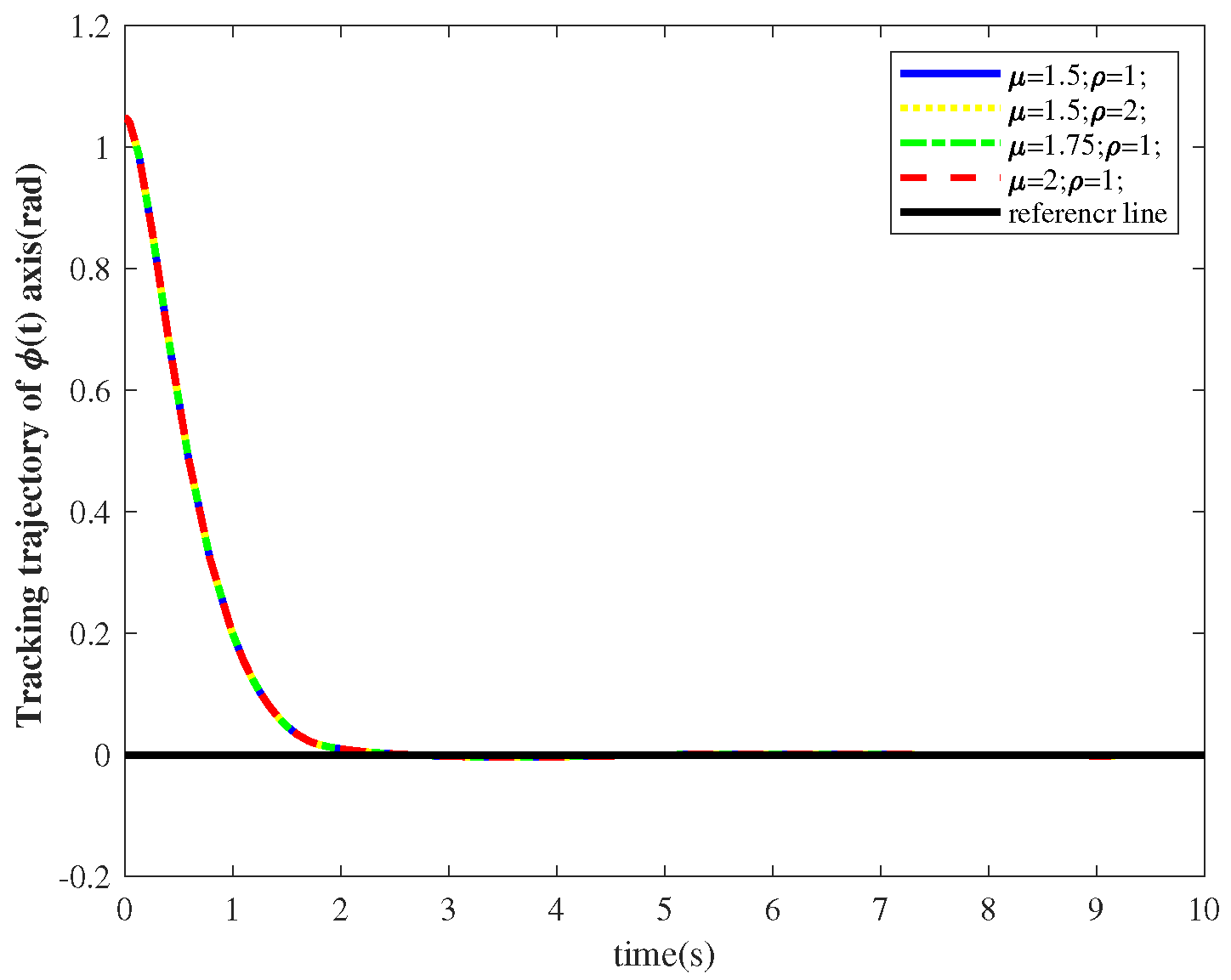
4.1. Attitude Tracking Control under FTISMC
4.2. Position Tracking Control under a Continuous Fixed-Time Controller
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Some Relevant and Important Lemmas
Appendix A.2. The Properties of the Arctangent Function
Appendix A.3. The Proof of Theorem 1
Appendix A.4. The Proof of Proposition 1
References
- Deepak, B.B.V.L.; Singh, P. A survey on design and development of an unmanned aerial vehicle (quadcopter). Int. J. Intell. Unmanned Syst. 2016, 4, 70–106. [Google Scholar]
- Bai, Y.Q.; Liu, H.; Shi, Z.Y.; Zhong, Y. Robust flight control of quadrotor unmanned air vehicles. Jiqiren (Robot) 2012, 34, 519–524. [Google Scholar] [CrossRef]
- Ma, F.Y.; Yang, Z.; Ji, P. Sliding mode controller based on the extended state observer for plant-protection quadrotor unmanned aerial vehicles. Mathematics 2022, 10, 1346. [Google Scholar] [CrossRef]
- Wang, F.; Xian, B.; Huang, G.P.; Zhao, B. Autonomous hovering control for a quadrotor unmanned aerial vehicle. In Proceedings of the 32nd Chinese Control Conference (CCC), Xi’an, China, 26–28 July 2013; pp. 620–625. [Google Scholar]
- Basri, M.A.M. Robust Backstepping controller design with a fuzzy compensator for autonomous hovering quadrotor UAV. Iran. J. Sci. Technol. Trans. Electr. Eng. 2018, 42, 379–391. [Google Scholar] [CrossRef]
- Zhou, L.H.; Zhang, B. Quadrotor UAV flight control using backstepping adaptive controller. In Proceedings of the IEEE 6th International Conference on Control Science and Systems Engineering (ICCSSE), Beijing, China, 17–19 July 2020; pp. 169–172. [Google Scholar]
- Wang, M.; Chen, B.; Lin, C. Prescribed finite-time adaptive neural trajectory tracking control of quadrotor via output feedback. Neurocomputing 2021, 458, 364–375. [Google Scholar] [CrossRef]
- Rao, J.J.; Li, B.; Zhang, Z. Position control of quadrotor UAV based on cascade fuzzy neural network. Energies 2022, 15, 1763. [Google Scholar] [CrossRef]
- Wang, F.; Ma, Z.G.; Gao, H.M. Disturbance observer-based nonsingular fast terminal sliding mode fault tolerant control of a quadrotor UAV with external disturbances and actuator faults. Int. J. Control Autom. Syst. 2022, 20, 1122–1130. [Google Scholar] [CrossRef]
- Li, S.; Sun, Z.; Talpur, M.A. A finite time composite control method for quadrotor UAV with wind disturbance rejection. Comput. Electr. Eng. 2022, 103, 108299. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef] [Green Version]
- Zhou, S.C.; Guo, K.X.; Yu, X. Fixed-time observer based safety control for a quadrotor UAV. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2815–2825. [Google Scholar] [CrossRef]
- Liu, K.; Wang, R.J.; Zheng, S.J. Fixed-time disturbance observer-based robust fault-tolerant tracking control for uncertain quadrotor UAV subject to input delay. Nonlinear Dyn. 2022, 107, 2363–2390. [Google Scholar] [CrossRef]
- Guo, K.X.; Zhang, W.Y.; Zhu, Y.K. Safety control or quadrotor UAV against ground effect and blade damage. IEEE Trans. Ind. Electron. 2022, 69, 13373–13383. [Google Scholar] [CrossRef]
- Liu, L.; Liu, J.J.; Li, J.F. Fault-tolerant control for quadrotor based on fixed-time ESO. Mathematics 2022, 10, 4386. [Google Scholar] [CrossRef]
- Ma, D.; Xia, Y.; Shen, G. Practical fixed-time disturbance rejection control for quadrotor attitude tracking. IEEE Trans. Ind. Electron. 2021, 68, 7274–7283. [Google Scholar] [CrossRef]
- Shao, X.L.; Tian, B.; Yang, W. Fixed-time trajectory following for quadrotors via output feedback. ISA Trans. 2021, 68, 213–224. [Google Scholar] [CrossRef]
- Li, X.; Qi, G.Y.; Zhang, L.M. Time-varying formation dynamics modeling and constrained trajectory optimization of multi-quadrotor UAVs. Nonlinear Dyn. 2021, 106, 3265–3284. [Google Scholar] [CrossRef]
- Li, B.; Gong, W.Q.; Yang, Y.S. Appointed fixed time observer-based sliding mode control for a quadrotor UAV under external disturbances. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 290–303. [Google Scholar] [CrossRef]
- Ai, X.L.; Yu, J.Q. Fixed-time trajectory tracking for a quadrotor with external disturbances: A flatness-based sliding mode control approach. Aerosp. Sci. Technol. 2019, 89, 58–76. [Google Scholar] [CrossRef]
- Mechali, O.; Xu, L.; Huang, Y. Observer-based fixed-time continuous nonsingular terminal sliding mode control of quadrotor aircraft under uncertainties and disturbances for robust trajectory tracking: Theory and experiment. Control Eng. Pract. 2021, 111, 104806. [Google Scholar] [CrossRef]
- Gong, W.Q.; Li, B.; Yang, Y.S. Fixed-time integral-type sliding mode control for the quadrotor UAV attitude stabilization under actuator failures. Aerosp. Sci. Technol. 2019, 95, 105444. [Google Scholar] [CrossRef]
- Hua, C.C.; Wang, K.; Chen, J.N. Tracking differentiator and extended state observer-based nonsingular fast terminal sliding mode attitude control for a quadrotor. Nonlinear Dyn. 2018, 94, 343–354. [Google Scholar] [CrossRef]
- Yang, S.; Han, J.; Xia, L. Adaptive robust servo constraint tracking control for an underactuated quadrotor UAV with mismatched uncertainties. ISA Trans. 2020, 106, 12–30. [Google Scholar] [CrossRef] [PubMed]
- Tripathi, V.K.; Kamath, A.K.; Behera, L. Finite-time super twisting sliding mode controller based on higher-order sliding mode observer for real-time trajectory tracking of a quadrotor. IET Control Theory Appl. 2020, 14, 2359–2371. [Google Scholar] [CrossRef]
- Moeini, A.; Lynch, A.F.; Zhao, Q. A backstepping disturbance observer control for multirotor UAVs: Theory and experiment. Int. J. Control 2022, 95, 2364–2378. [Google Scholar] [CrossRef]
- Mu, C.; Zhang, Y. Learning-based robust tracking control of quadrotor with time-varying and coupling uncertainties. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 259–273. [Google Scholar] [CrossRef] [PubMed]
- Miranda-Colorado, R.; Aguilar, L.T.; Herrero-Brito, J.E. Reduction of power consumption on quadrotor vehicles via trajectory design and a controller-gains tuning stage. Aerosp. Sci. Technol. 2018, 78, 280–296. [Google Scholar] [CrossRef]
- Miranda-Colorado, R.; Aguilar, L.T. Robust PID control of quadrotors with power reduction analysis. ISA Trans. 2020, 98, 47–62. [Google Scholar] [CrossRef]
- Choi, Y.C.; Ahn, H.S. Nonlinear control of quadrotor for point tracking: Actual implementation and experimental tests. IEEE/ASME Trans. Mechatron. 2015, 20, 1179–1192. [Google Scholar] [CrossRef]
- Zhu, W.; Du, H.; Cheng, Y. Hovering control for quadrotor aircraft based on finite-time control algorithm. Nonlinear Dyn. 2017, 88, 2359–2369. [Google Scholar] [CrossRef]
- Shao, S.; Wang, S.; Zhao, Y. Fixed time output feedback control for quadrotor unmanned aerial vehicle under disturbances. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2022, 236, 3554–3566. [Google Scholar] [CrossRef]
- Huang, T.; Huang, D.; Wang, Z. Robust tracking control of a quadrotor UAV based on adaptive sliding mode controller. Omplexity 2019, 2019, 7931632. [Google Scholar] [CrossRef]
- Xu, L.X.; Ma, H.J.; Guo, D. Backstepping sliding-mode and cascade active disturbance rejection control for a quadrotor UAV. IEEE Trans. Mechatron. 2020, 25, 2743–2753. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Robust adaptive nonsingular fast terminal sliding-mode tracking control for an uncertain quadrotor UAV subjected to disturbances. ISA Trans. 2020, 99, 290–304. [Google Scholar] [CrossRef] [PubMed]
- Lee, K.U.; Kim, H.S.; Park, J.B. Hovering control of a quadrotor. In Proceedings of the 12th International Conference on Control, Automation and Systems (ICCAS), Jeju, Republic of Korea, 17–21 October 2012; pp. 162–167. [Google Scholar]
- Majd, S.; THassan, S.; Benjamin, L. Local controllability and attitude stabilization of multirotor UAVs: Validation on a coaxial octorotor. Rob. Auton. Syst. 2017, 91, 128–138. [Google Scholar]
- Wang, F.; Gao, H.; Wang, K. Disturbance observer-based finite-time control design for a quadrotor UAV with external disturbance. IEEE Trans. Aeros. Elect. Syst. 2021, 57, 834–847. [Google Scholar] [CrossRef]
- Filippov, A.F. Differential Equations with Discontinuous Righthand Sides: Control Systems; Kluwer: Dordrecht, The Netherlands, 1988. [Google Scholar]
- Suleiman, H.U.; Mu’azu, M.B.; Arma, T.A. Methods of chattering reduction in sliding mode control: A case study of ball and plate system. In Proceedings of the 2018 IEEE 7th International Conference on Adaptive Science and Technology (ICAST), Accra, Ghana, 22–24 August 2018; pp. 1–8. [Google Scholar]
- Wu, D.; Zhang, W.; Du, H. Robust adaptive finite-time trajectory tracking control of a quadrotor aircraft. Int. J. Robust Nonlinear Control 2021, 31, 8030–8054. [Google Scholar] [CrossRef]
- Yao, H.; Gao, F.; Huang, J. Barrier lyapunov functions-based fixed-time stabilization of nonholonomic systems with unmatched uncertainties and time-varying output constraints. Nonlinear Dyn. 2020, 99, 2835–2849. [Google Scholar] [CrossRef]
- Tian, B.; Lu, H.; Zuo, Z. Fixed-time stabilization of high-order integrator systems with mismatched disturbance. Nonlinear Dyn. 2018, 94, 2889–2899. [Google Scholar] [CrossRef]
- Parsegov, S.E.; Polyakov, A.E.; Shcherbakov, P.S. Fixed-time consensus algorithm for multi-agent systems with integrator dynamics. IFAC Proc. Vol. 2013, 46, 110–115. [Google Scholar] [CrossRef] [Green Version]
- Craig, J.J. Introduction to Robotics: Mechanics and Control, 4th ed.; Pearson: New York, NY, USA, 2018; pp. 109–145. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Meaning |
|---|---|
| Coordinates in the inertial frame | |
| Roll, pitch, and yaw angles | |
| Inertial moments, along with given directions | |
| Angular velocities of the four rotors | |
| Thrust and torques, along with given directions | |
| Mass and gravitational acceleration | |
| Lift coefficient, antitorque coefficient, and length of the quadrotor arm |
| Controller | Control Parameters |
|---|---|
| FTISMC | , , , , , , , , |
| NFTSMC | , , , , , , |
| FC | , , , |
| PD | , |
| Attitude Controller | Settling Time(s) | Maximum Overshoot | Peak Time(s) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Schemes | |||||||||
| FTISMC | 2.174 | 2.288 | 2.283 | 2.647 | 0.3961 | 0.9306 | 0.506 | 1.447 | 0.6305 |
| NFTSMC | 2.288 | 2.754 | 3.531 | 1.672 | 0.959 | 1.072 | 0.7174 | 1.403 | 1.15 |
| FC | 4.14 | 3.74 | 3.652 | 0.752 | 0.079 | 0.313 | 0.602 | 2.062 | 1.054 |
| PD | 4.14 | 3.94 | 3.829 | 0.71 | 0.074 | 0.293 | 0.791 | 2.062 | 1.174 |
| Controller | Control Parameters |
|---|---|
| fixed-time controller | , , , |
| finite-time controller | , , , |
| traditional controller | , |
| Position Controller | Settling Time(s) | Maximum Overshoot | Peak Time(s) |
|---|---|---|---|
| fixed-time controller | 3.022 | 5.43 | 0.046 |
| finite-time controller | 4.836 | 0.23 | 0.184 |
| traditional controller | 3.654 | 3.06 | 0.498 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, N.; Wang, C. A Switching Mode Control Scheme for the Hovering Control of Quadrotor Unmanned Aerial Vehicles. Mathematics 2023, 11, 994. https://doi.org/10.3390/math11040994
Cheng N, Wang C. A Switching Mode Control Scheme for the Hovering Control of Quadrotor Unmanned Aerial Vehicles. Mathematics. 2023; 11(4):994. https://doi.org/10.3390/math11040994
Chicago/Turabian StyleCheng, Nana, and Chaoli Wang. 2023. "A Switching Mode Control Scheme for the Hovering Control of Quadrotor Unmanned Aerial Vehicles" Mathematics 11, no. 4: 994. https://doi.org/10.3390/math11040994
APA StyleCheng, N., & Wang, C. (2023). A Switching Mode Control Scheme for the Hovering Control of Quadrotor Unmanned Aerial Vehicles. Mathematics, 11(4), 994. https://doi.org/10.3390/math11040994