

Refined Green–Lindsay Model for the Response of Skin Tissue under a Ramp-Type Heating



Abstract
:1. Introduction
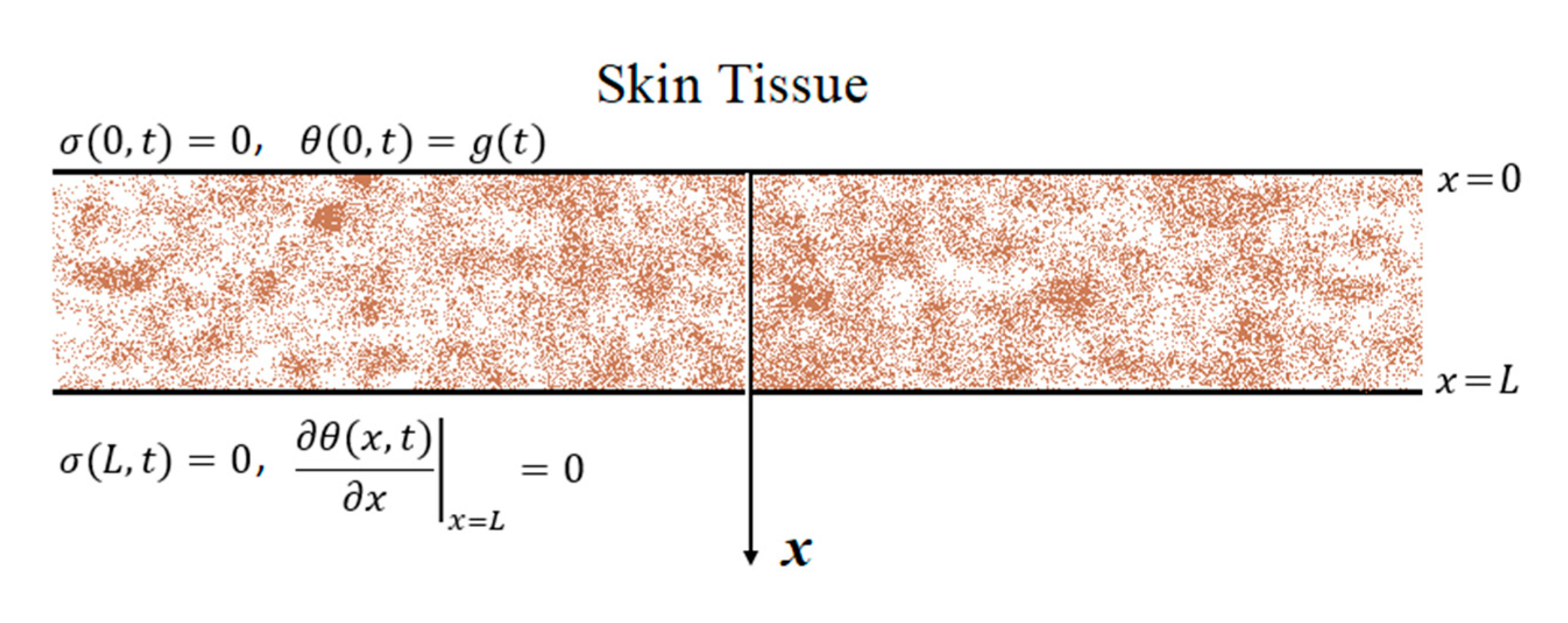
2. Governing Equations
3. Mathematical Solution to the Problem
4. Laplace Transform Domain and Its Inversion
5. Numerical Results
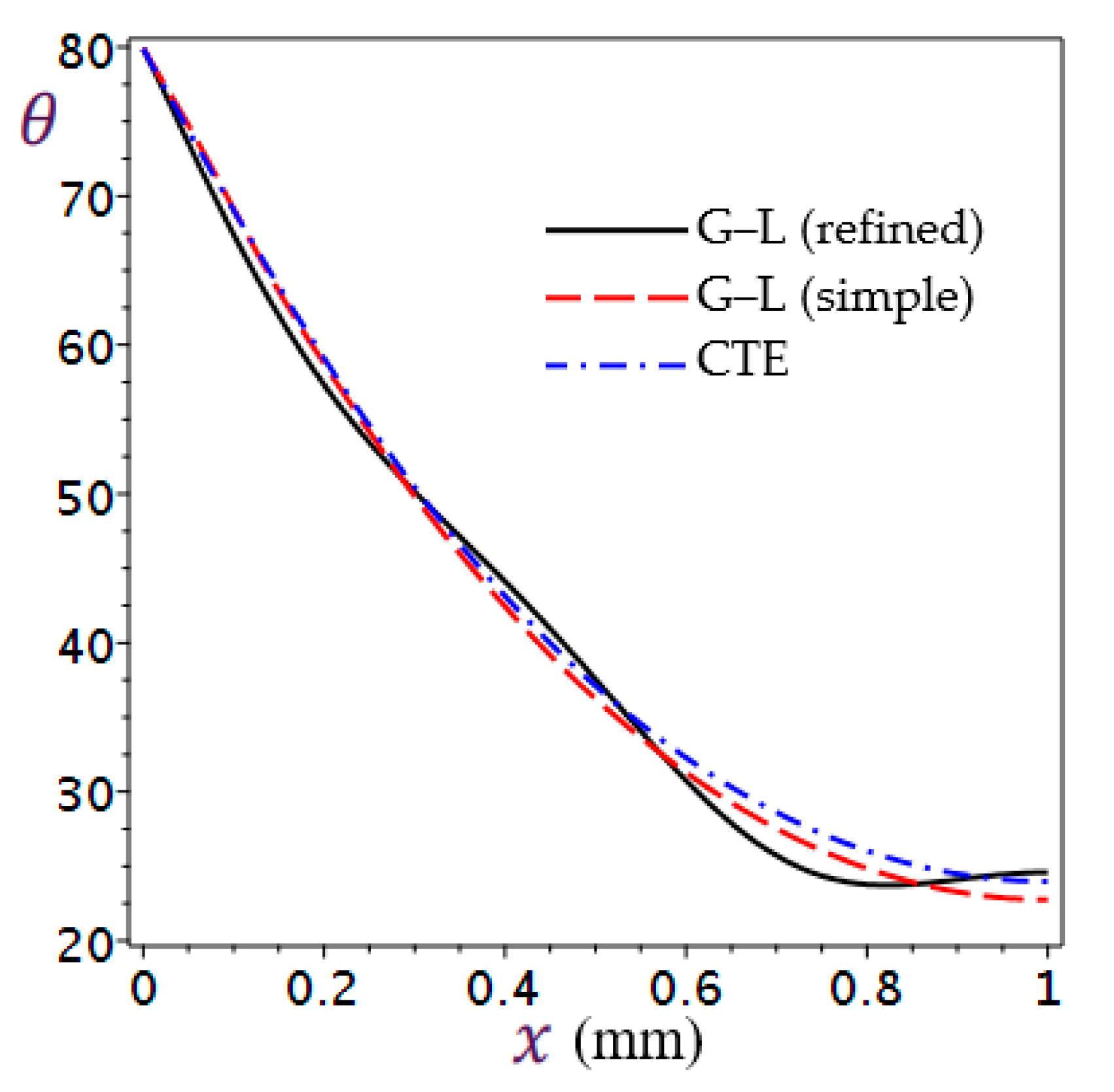
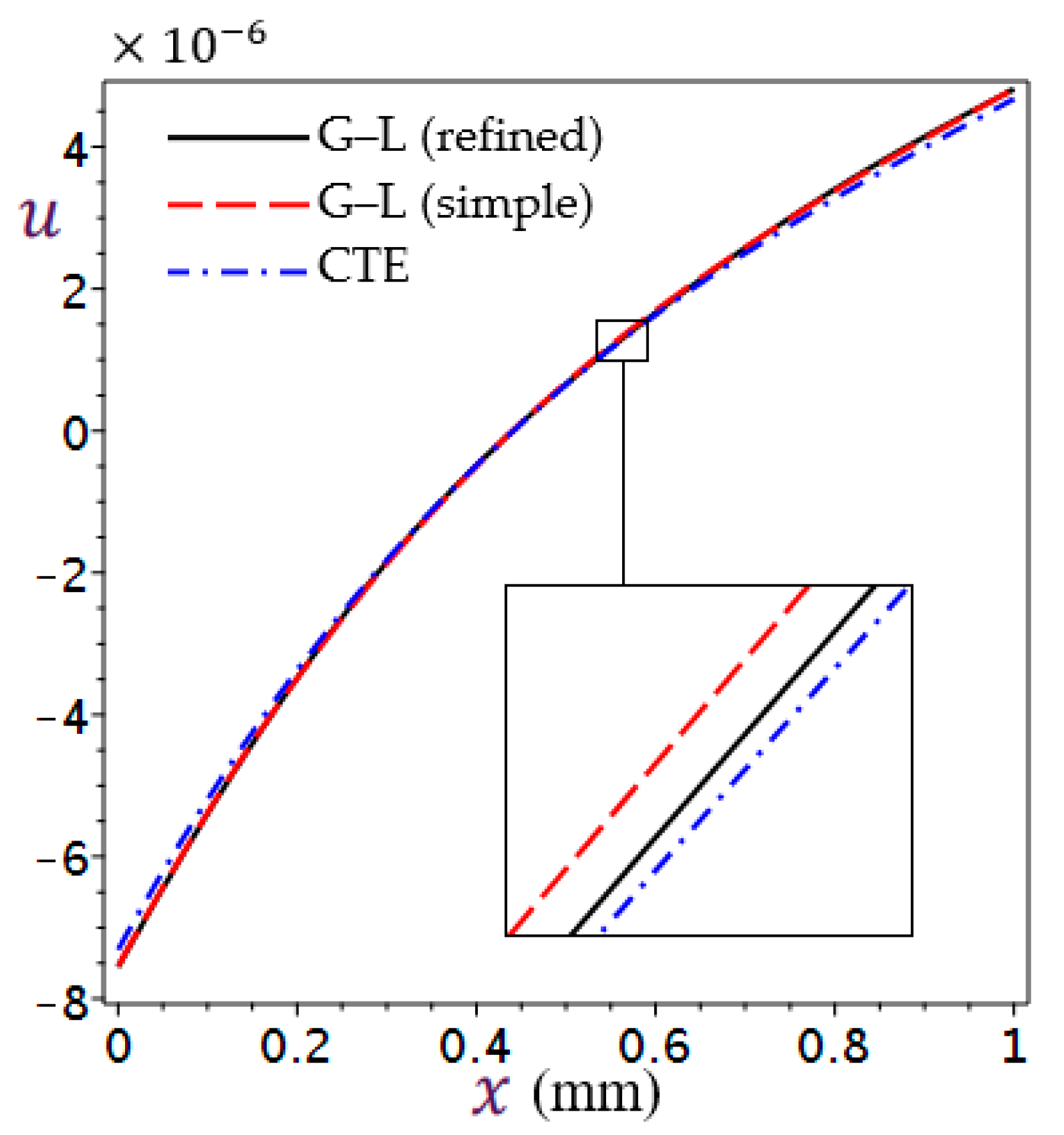
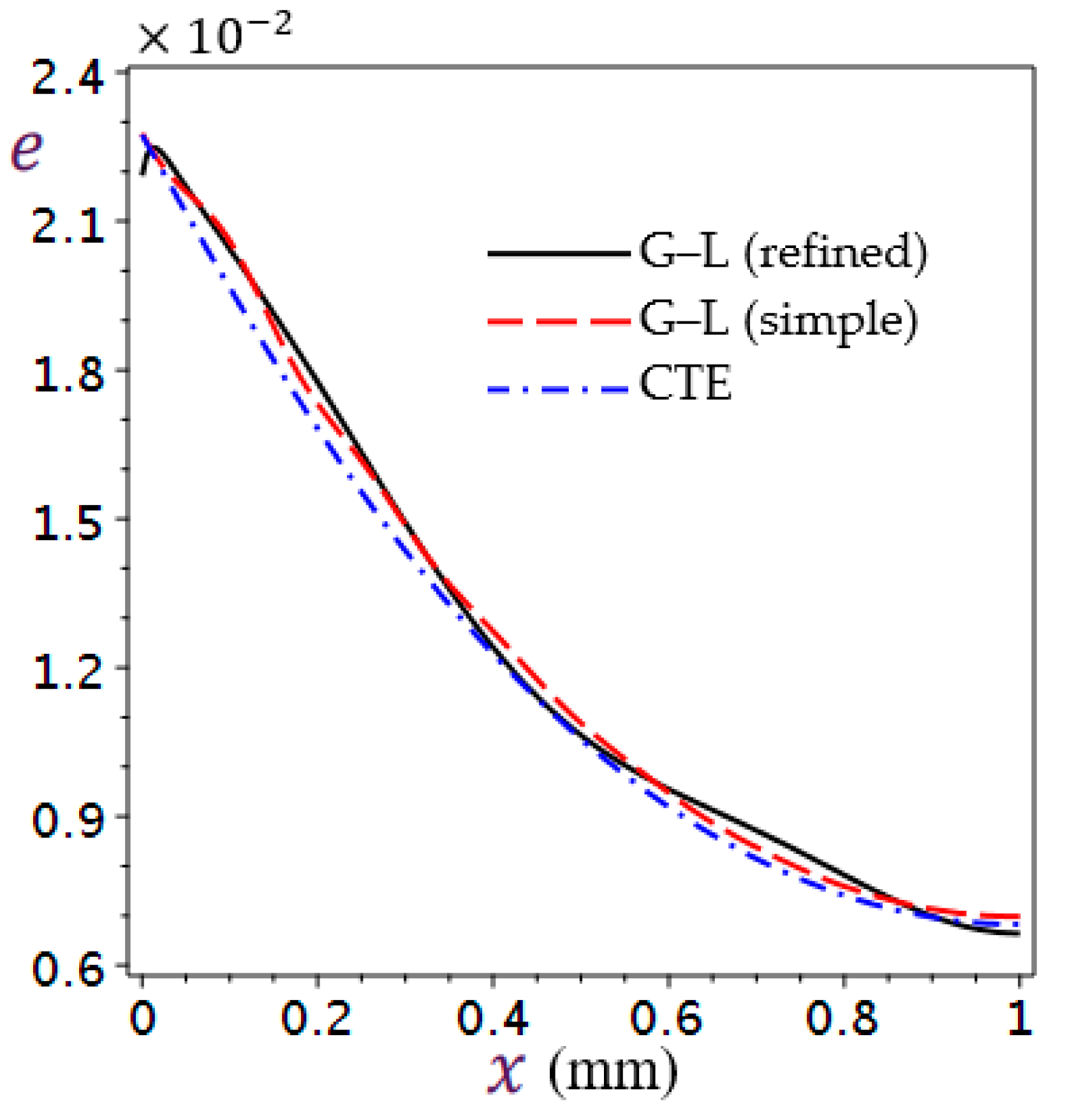
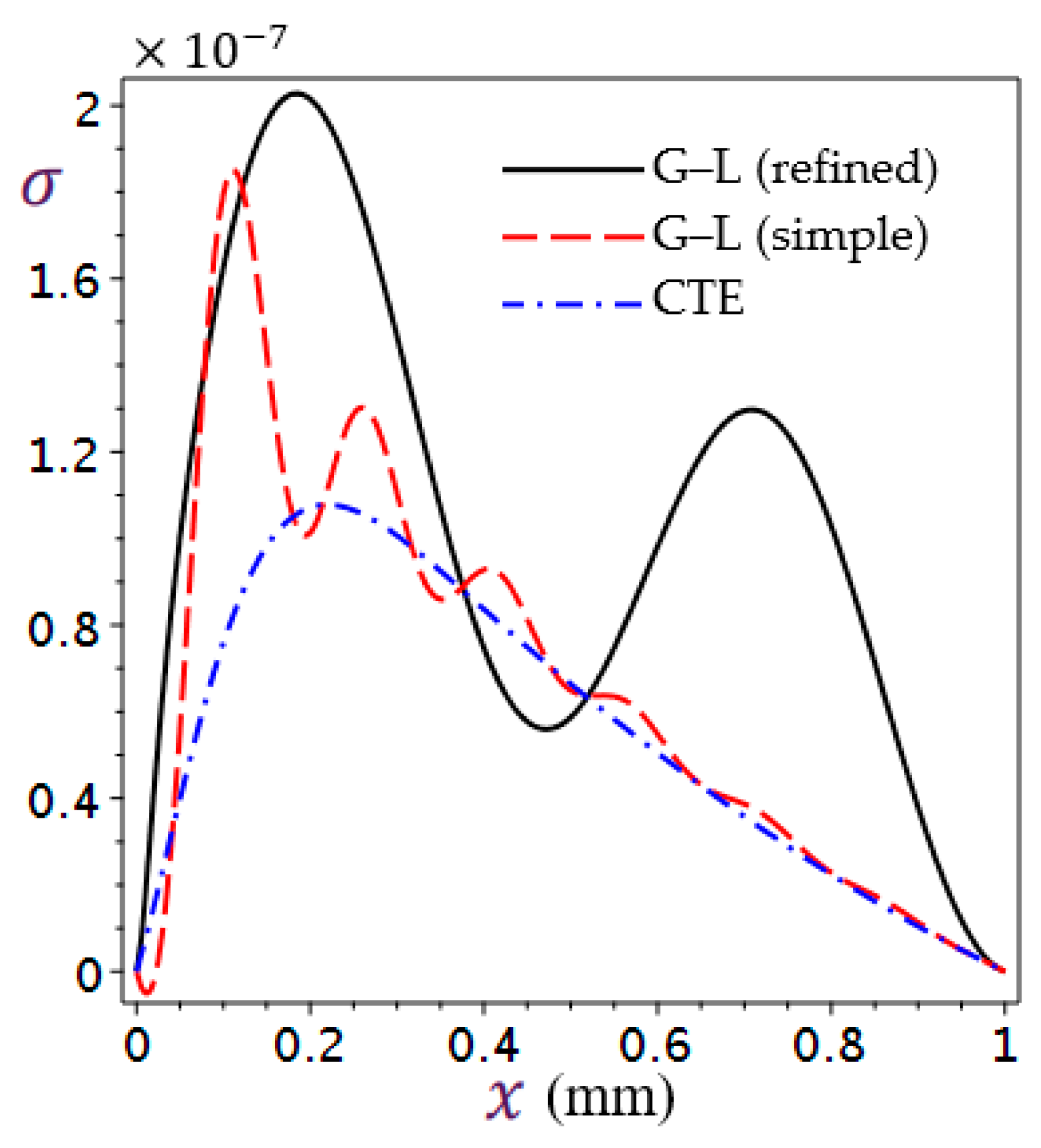
5.1. Validation of Results
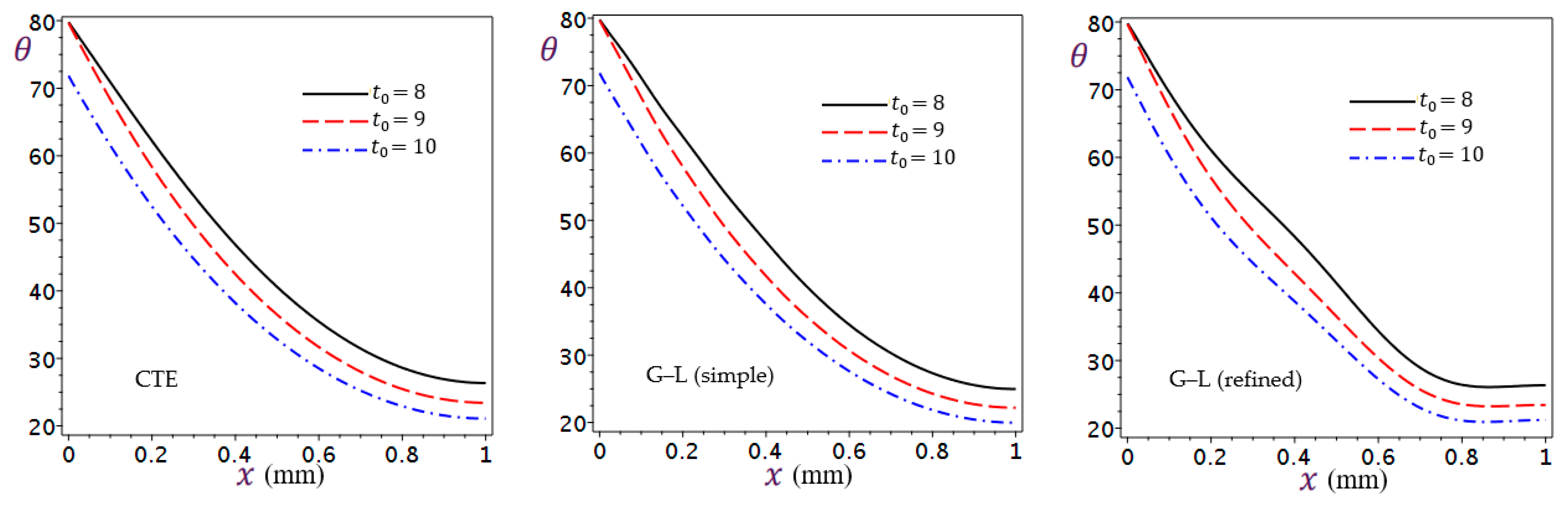
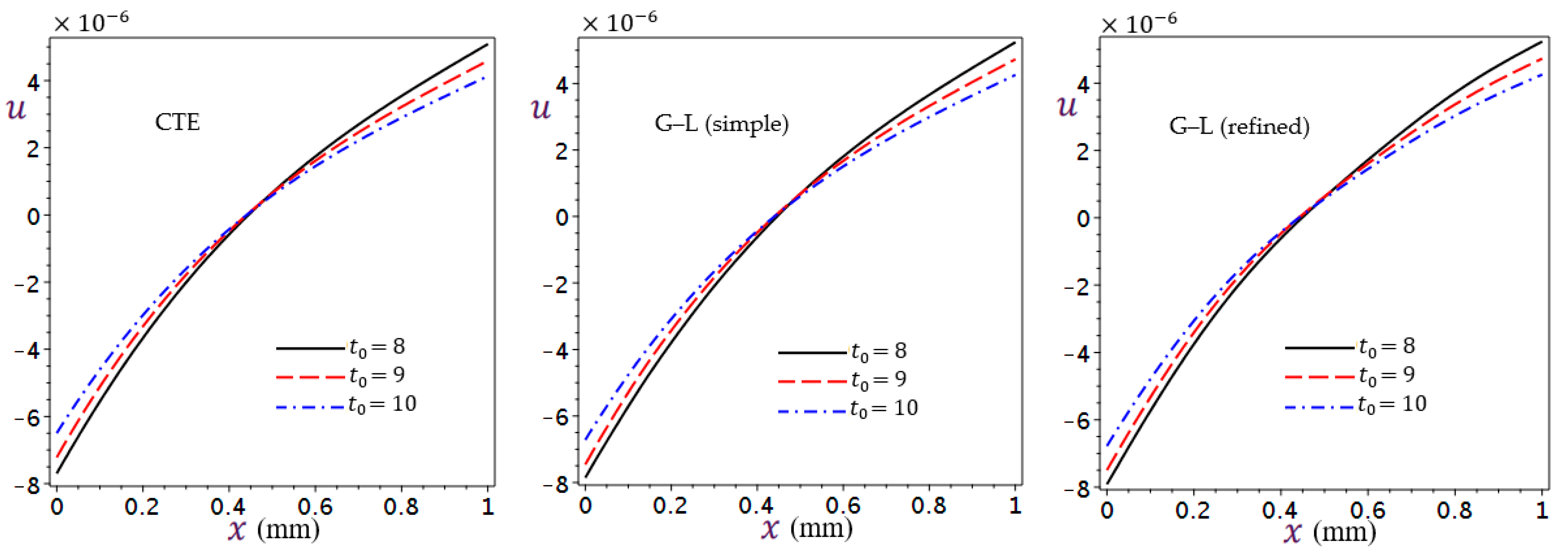
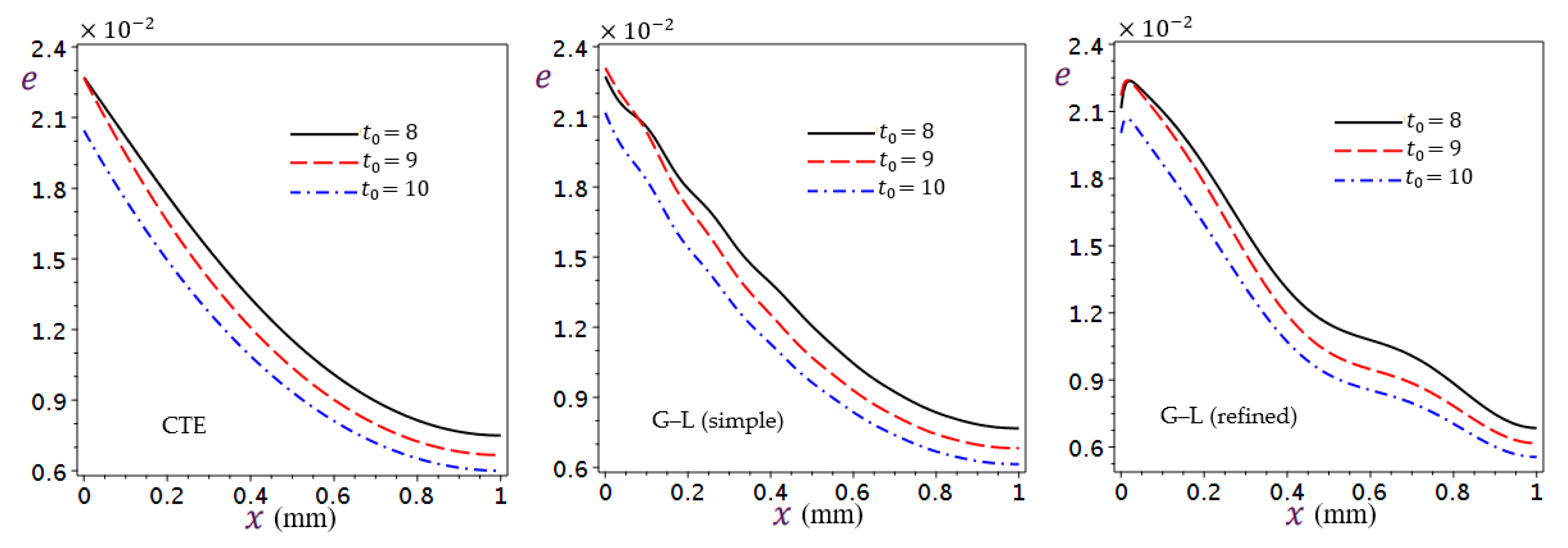
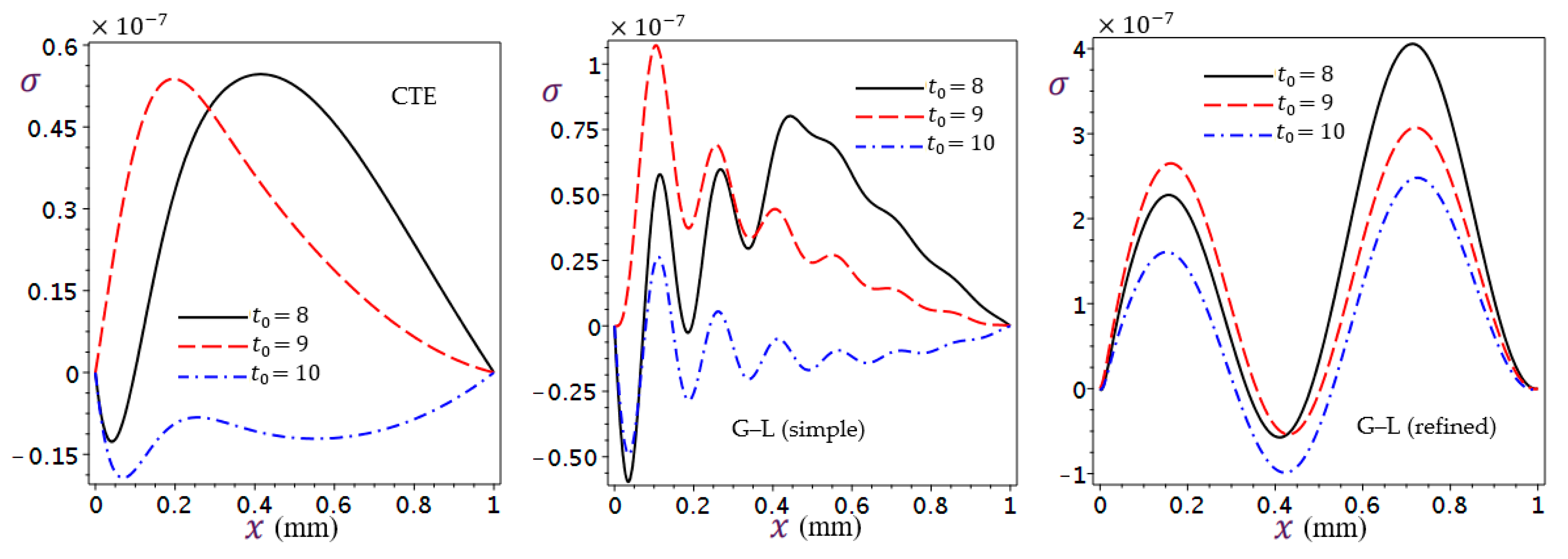
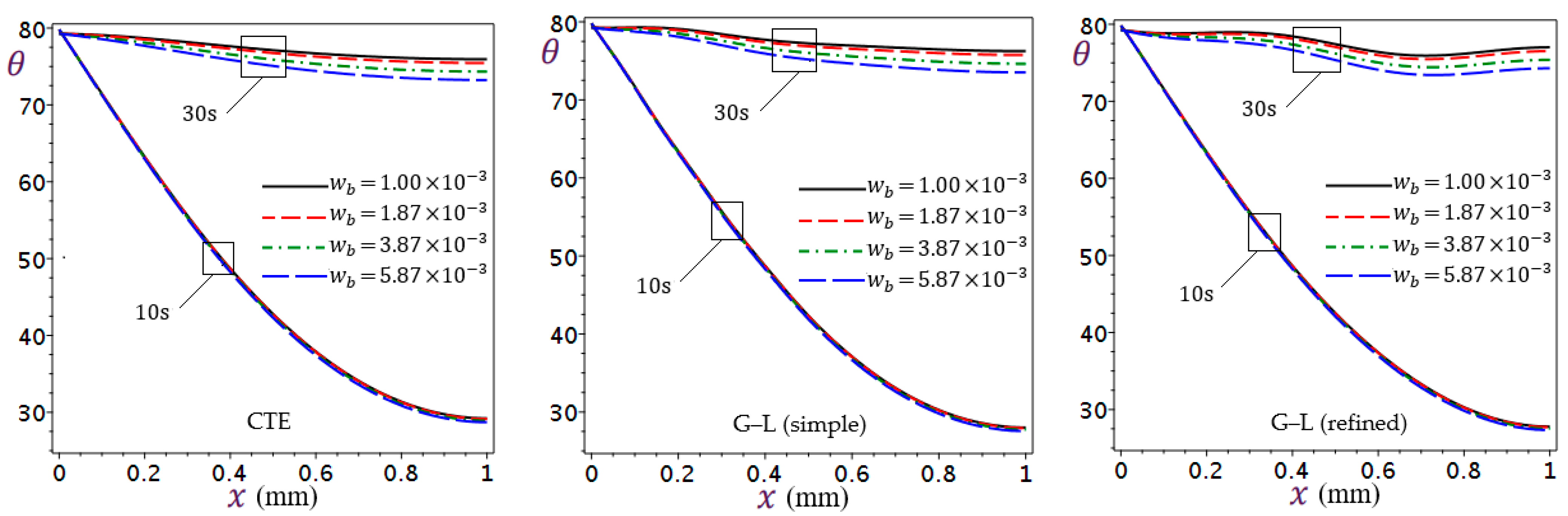
5.2. Effect of Ramp-Type Heating Parameter
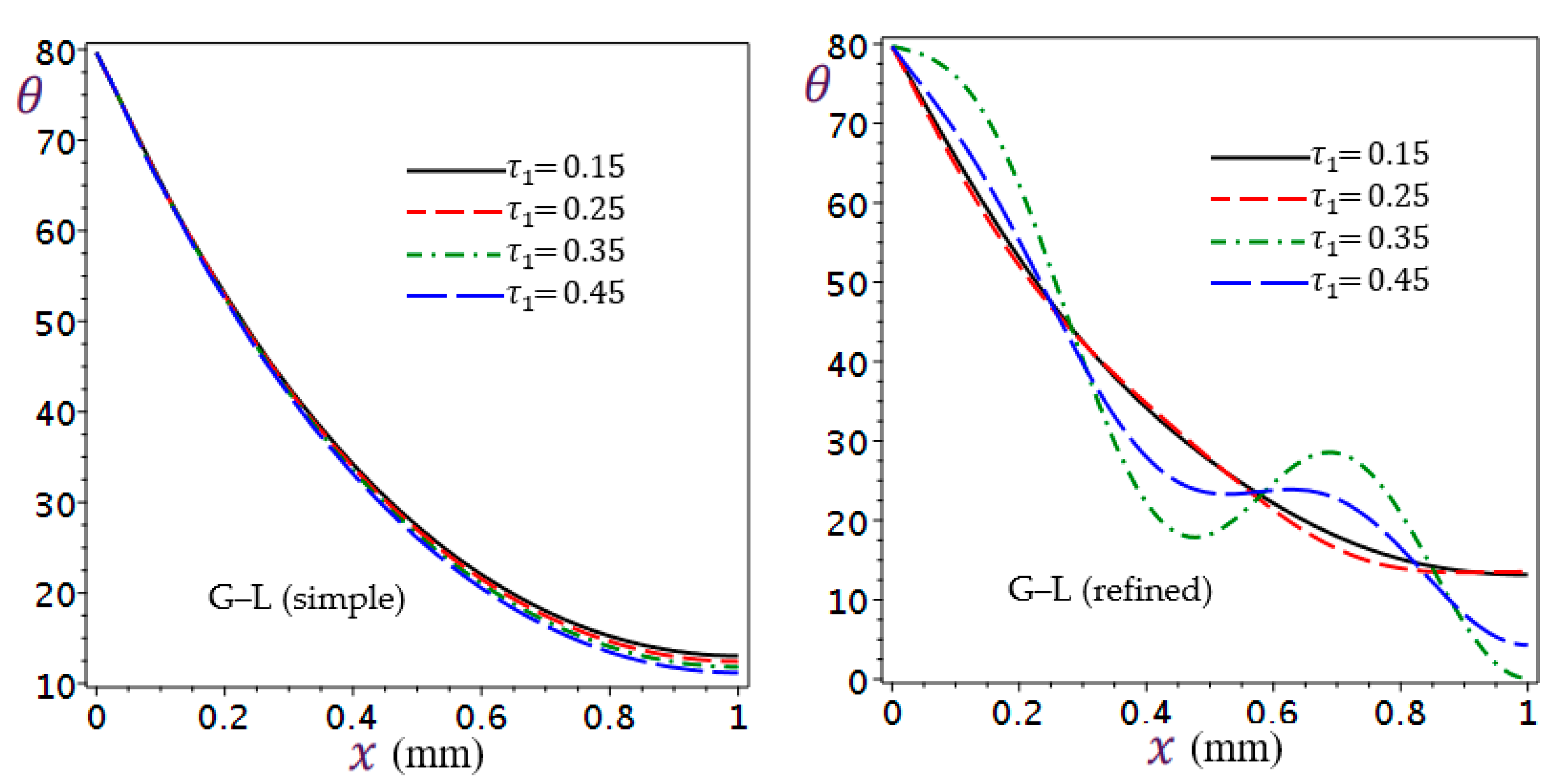
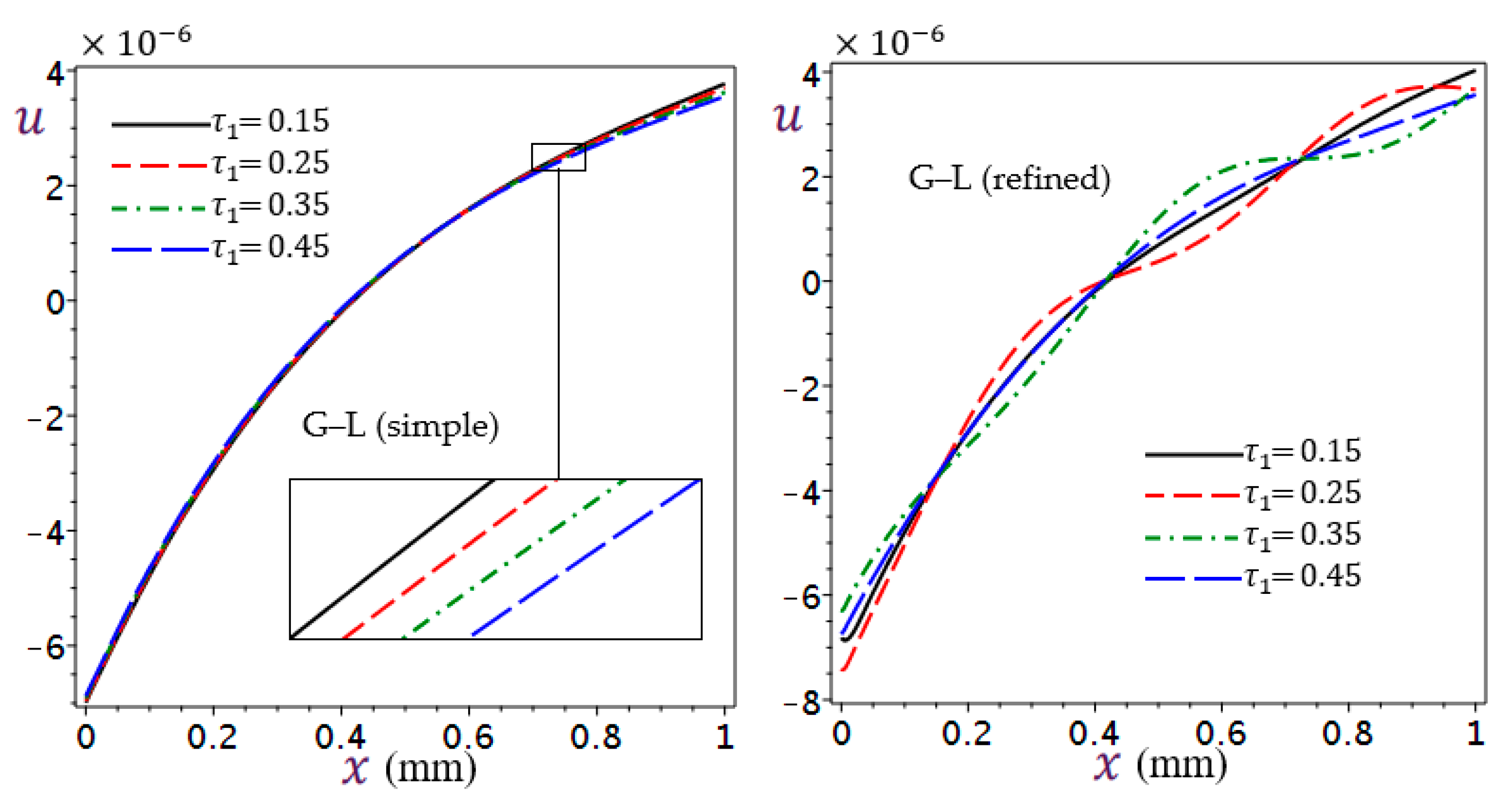
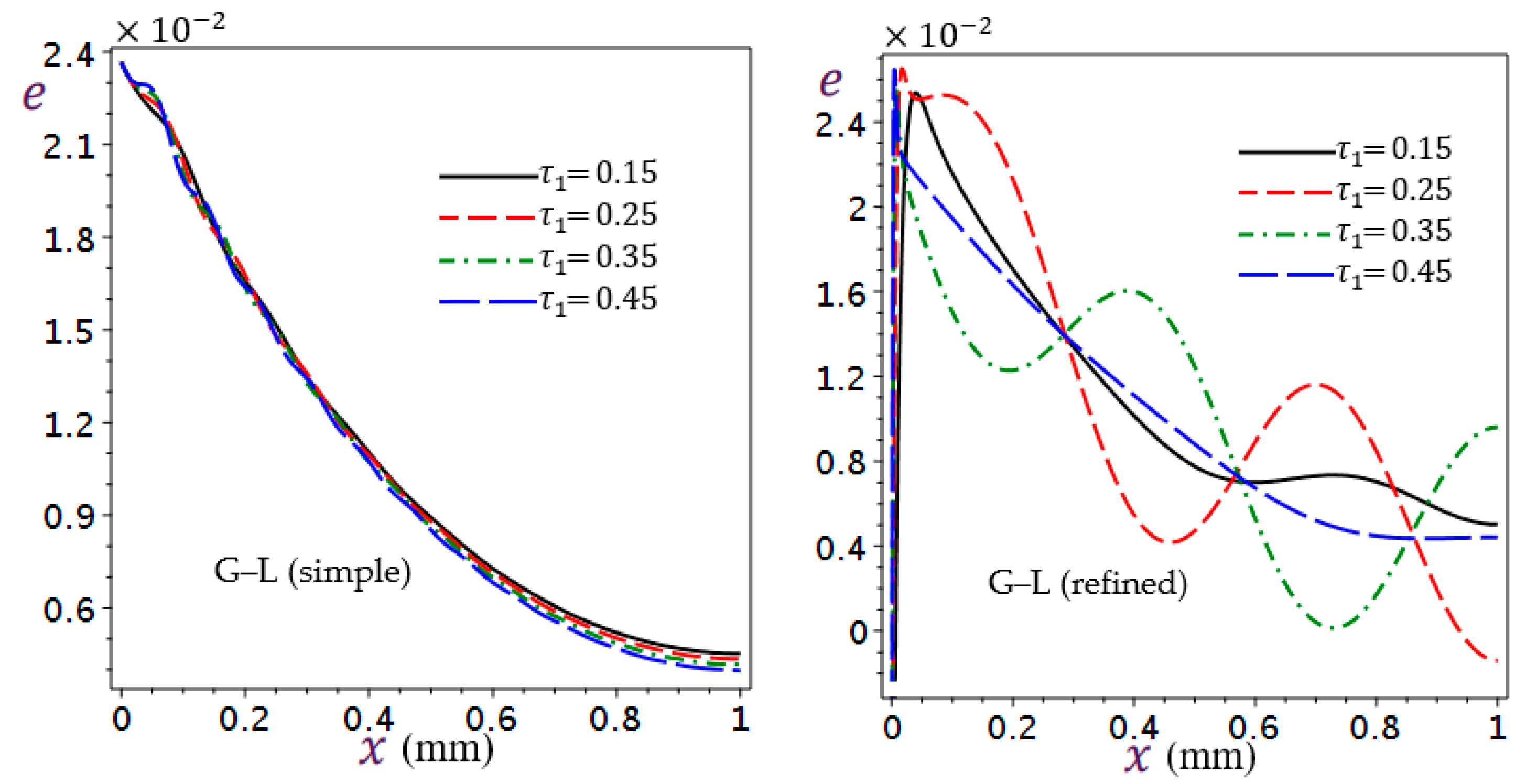
5.3. Effect of Green–Lindsay Relaxation Times
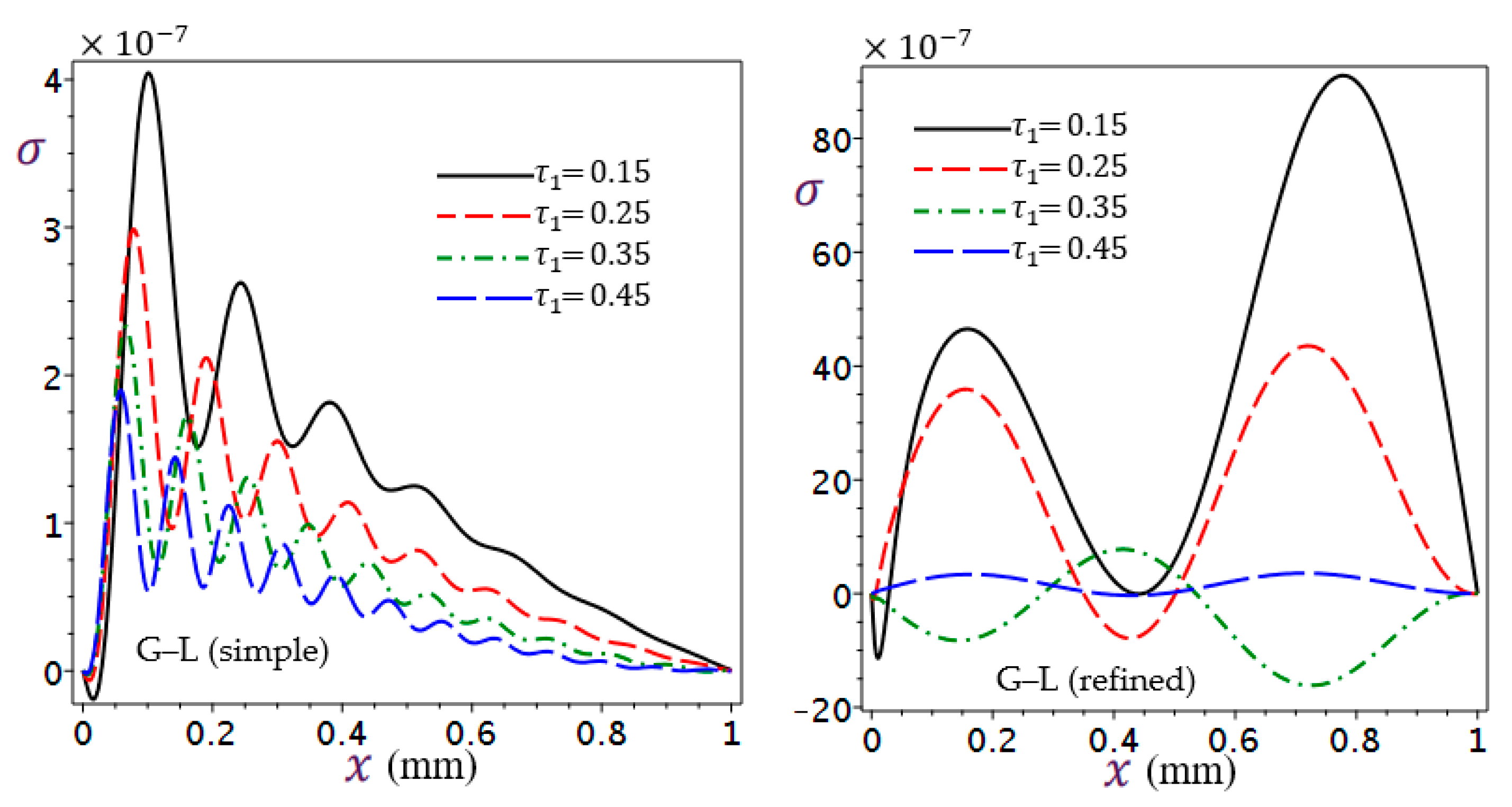
5.3.1. Effect of First Relaxation Time
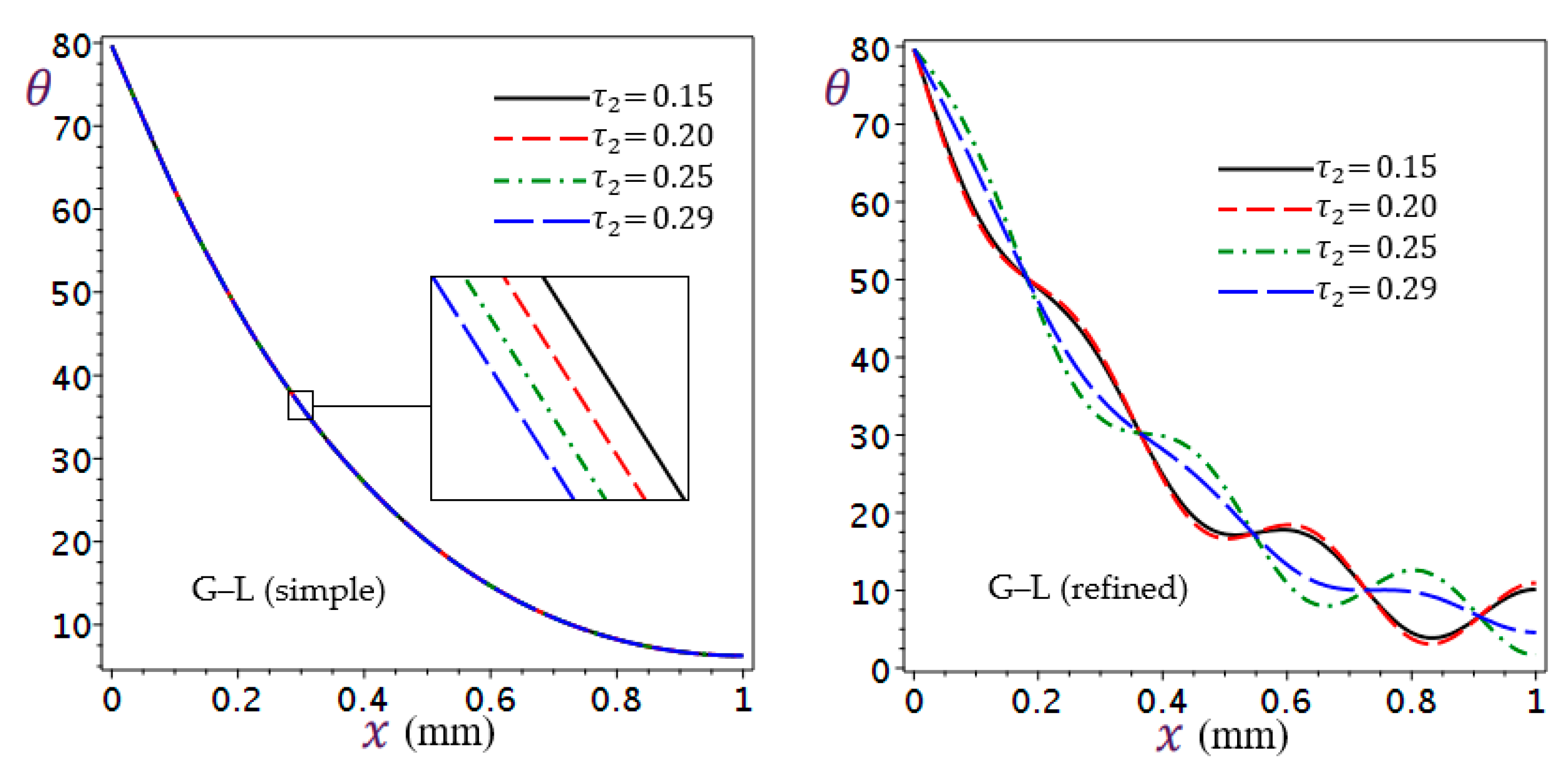
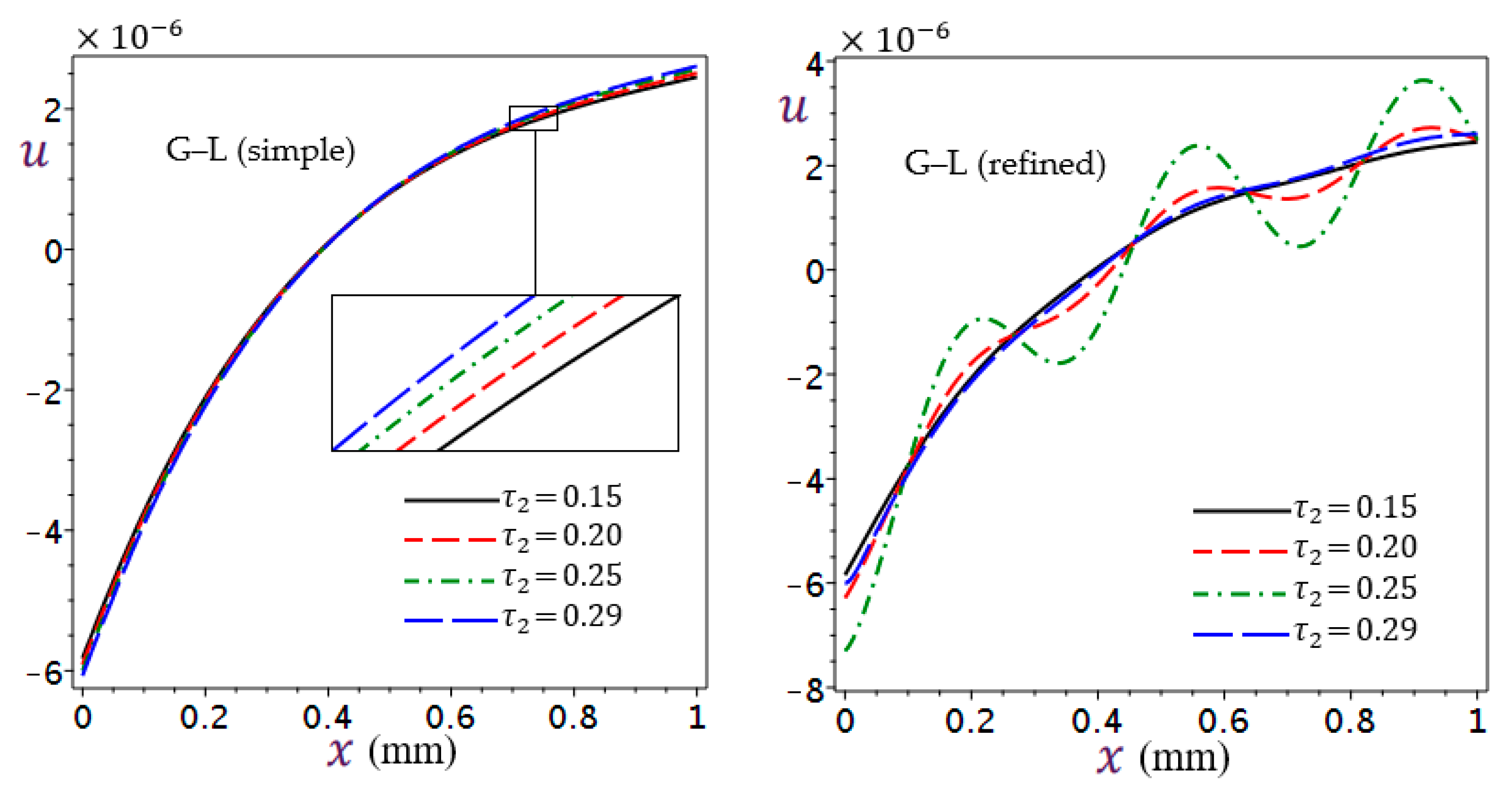
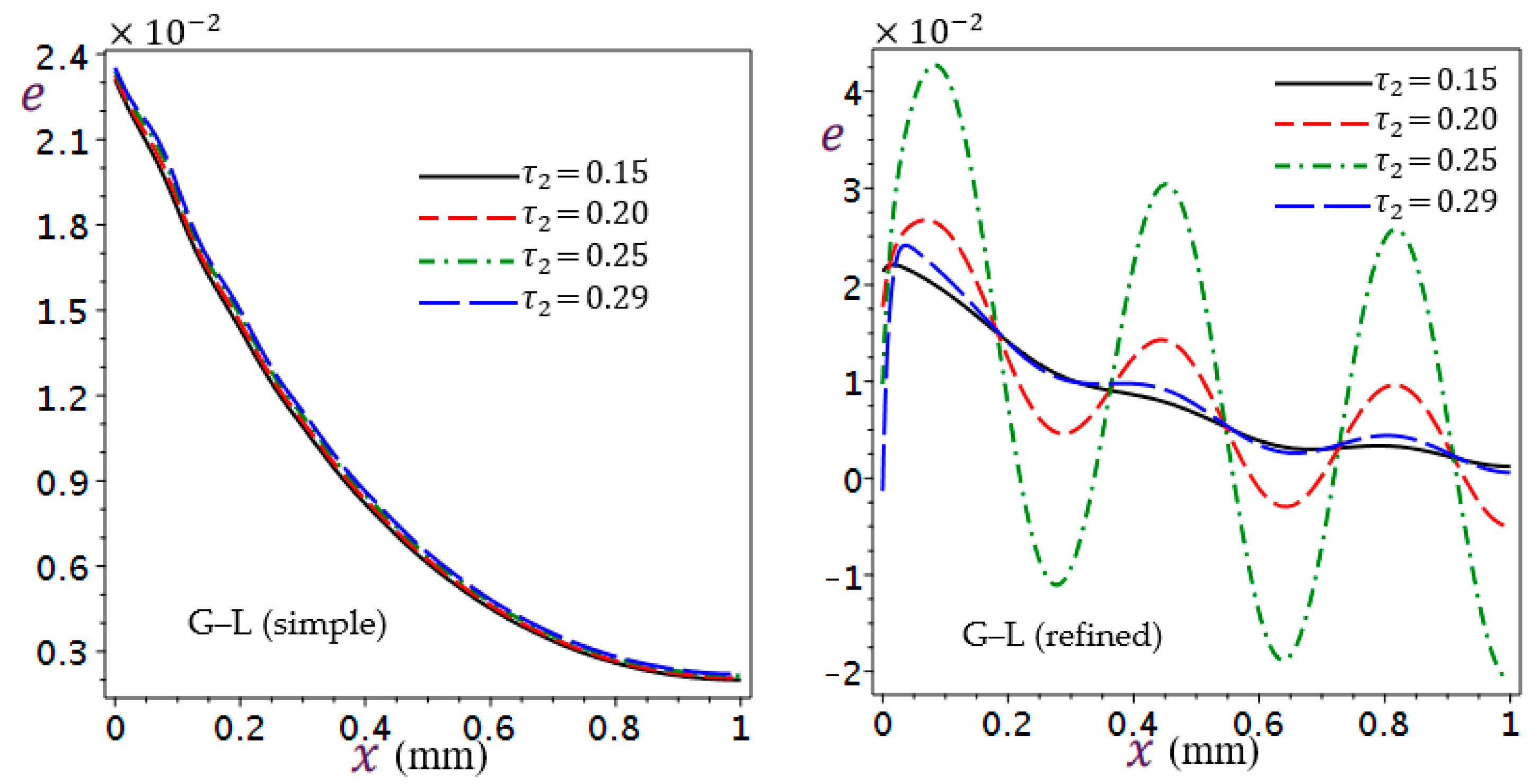
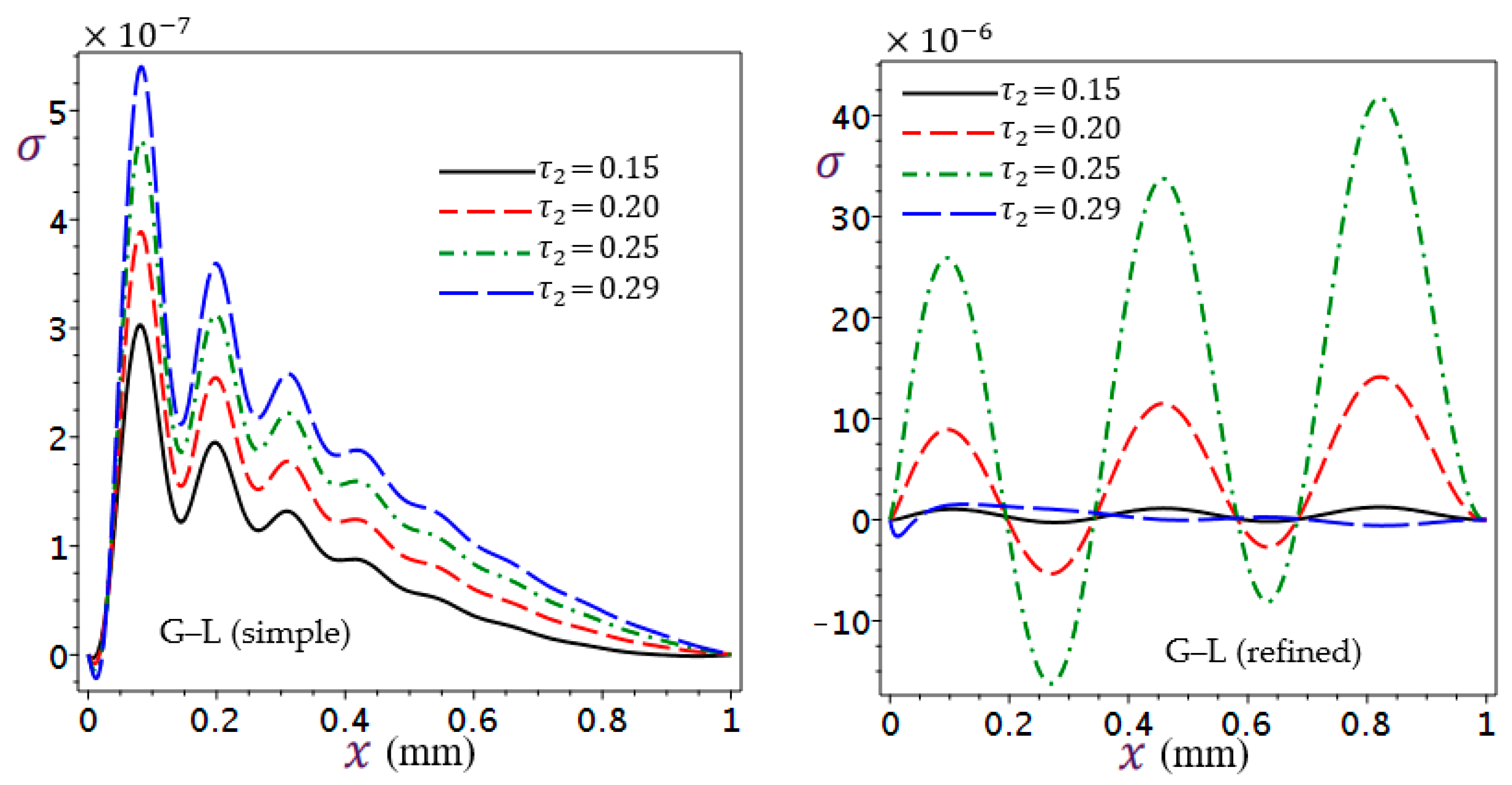
5.3.2. Effect of Second Relaxation Time
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition | Value/Units |
|---|---|---|
| Time | ||
| Temperature | K | |
| Blood temperature | K | |
| K | ||
| Coefficient of thermal conductivity of skin tissue | W/(m K) | |
| The mass density of the tissue | kg/m3 | |
| Heat capacity of a unit mass of the tissue | J/(K kg) | |
| Dilatation | ||
| , | Lamé’s constant of the tissue | kg/(m s2) kg/(m s2) |
| Thermal expansion coefficient | (1/K) | |
| Displacement components | ||
| Components of the external body force vector per unit mass | ||
| , | Relaxation times of G–L | s |
| Rate of blood perfusion, which indicates the effectiveness of the thermal energy transfer between the blood and the afflicted tissue | 1/s | |
| The mass density of the blood | kg/m3 | |
| Specific heat capacity of the blood | J/(K kg) | |
| The heat source of the metabolic generation of tissue cells | W/m3 | |
| External thermal load | 0 W/m3 | |
| L | The thickness of the biological tissue | 1 mm |
References
- Pennes, H.H. Analysis of tissue and arterial blood temperatures in the resting human forearm. J. Appl. Phys. 1948, 85, 5–34. [Google Scholar] [CrossRef] [PubMed]
- Tzou, D.Y. The generalized lagging response in small-scale and high-rate heating. Int. J. Heat Mass Transf. 1995, 38, 3231–3240. [Google Scholar] [CrossRef]
- Biot, M.A. Thermoelasticity and irreversible thermodynamics. J. Appl. Phys. 1956, 27, 240–253. [Google Scholar] [CrossRef]
- Lord, H.W.; Shulman, Y. A generalized dynamical theory of thermoelasticity. J. Mech. Phys. Solids 1967, 15, 299–309. [Google Scholar] [CrossRef]
- Green, A.E.; Lindsay, K.A. Thermoelasticity. J. Elast. 1972, 2, 1–7. [Google Scholar] [CrossRef]
- Mitra, K.; Kumar, S.; Vedavarz, A.; Moallemi, M.K. Experimental evidence of hyperbolic heat conduction in processed meat. ASME J. Heat Transf. 1995, 117, 568–573. [Google Scholar] [CrossRef]
- Antaki, P.J. New interpretation of non-Fourier heat conduction in processed meat. ASME J. Heat Transf. 2005, 127, 189–193. [Google Scholar] [CrossRef]
- Liu, K.C.; Lin, C.T. Solution of an inverse heat conduction problem in a bi-layered spherical tissue. Numer. Heat Transf. Part A Appl. 2010, 58, 802–818. [Google Scholar] [CrossRef]
- Xu, F.; Lu, T.J.; Seffen, K.A. Biothermomechanical behavior of skin tissue. Acta Mech. Sincia 2008, 24, 1–23. [Google Scholar] [CrossRef]
- Xu, F.; Lu, T.J.; Seffen, K.A.; Ng, E.Y.K. Mathematical modeling of skin bioheat transfer. Appl. Mech. Rev. 2009, 62, 50801–50835. [Google Scholar] [CrossRef]
- Xu, F.; Seffen, K.A.; Lu, T.J. Non-Fourier analysis of skin biothermomechanics. Int. J. Heat Mass Transf. 2008, 51, 2237–2259. [Google Scholar] [CrossRef]
- Ng, E.Y.K.; Tan, H.M.; Ooi, E.H. Prediction and parametric analysis of thermal profiles within heated human skin using boundary element method. Philos. Trans. A 2010, 368, 655–678. [Google Scholar] [CrossRef] [PubMed]
- Kundu, B.; Dewanjee, D. A new method for non-Fourier thermal response in a single layer skin tissue. Case Stud. Therm. Eng. 2015, 5, 79–88. [Google Scholar] [CrossRef] [Green Version]
- Shih, T.C.; Yuan, P.; Lin, W.L.; Kou, H.S. Analytical analysis of the Pennes bioheat transfer equation with sinusoidal heat flux condition on skin surface. Med. Eng. Phys. 2007, 29, 946–953. [Google Scholar] [CrossRef]
- Ghazizadeh, H.R.; Azimi, A.; Maerefat, M. An inverse problem to estimate relaxation parameter and order of fractionality in fractional single-phase-lag heat equation. Int. J. Heat Mass Transf. 2012, 55, 2095–2101. [Google Scholar] [CrossRef]
- Ezzat, M.A.; El-Karamany, A.S. On fractional thermoelasticity. Math. Mech. Solids 2011, 16, 334–346. [Google Scholar] [CrossRef]
- Jiang, X.Y.; Qi, H.T. Thermal wave model of bioheat transfer with modified Riemann-Liouville fractional derivative. J. Phys. A Math. Theor. 2012, 45, 485101. [Google Scholar] [CrossRef]
- Ezzat, M.A.; El-Bary, A.A.; Al-Sowayan, N.S. Tissue responses to fractional transient heating with sinusoidal heat flux condition on skin surface. Anim. Sci. J. 2016, 87, 1304–1311. [Google Scholar] [CrossRef] [PubMed]
- Ezzat, M.A.; El-Karamany, A.S.; El-Bary, A.A. Magneto-thermoelasticity with two fractional order heat transfer. J. Assoc. Arab Univ. Basic Appl. Sci. 2016, 19, 70–79. [Google Scholar] [CrossRef]
- Kumar, D.; Rai, K.N. Numerical simulation of time fractional dual-phase-lag model of heat transfer within skin tissue during thermal therapy. J. Therm. Biol. 2017, 67, 49–58. [Google Scholar] [CrossRef]
- Kumar, A.; Shivay, O.N.; Mukhopadhyay, S. Infinite speed behavior of two-temperature Green–Lindsay thermoelasticity theory under temperature-dependent thermal conductivity. J. Appl. Math. Phys. 2019, 70, 26. [Google Scholar] [CrossRef]
- Chyr, A.; Shynkarenko, H.A. Well-posedness of the Green–Lindsay variational problem of dynamic thermoelasticity. J. Math. Sci. 2017, 226, 11–27. [Google Scholar] [CrossRef]
- Quintanilla, R. Some qualitative results for a modification of the Green–Lindsay thermoelasticity. Meccanica 2018, 53, 3607–3613. [Google Scholar] [CrossRef]
- Goudarzi, P.; Azimi, A. Numerical simulation of fractional non-Fourier heat conduction in skin tissue. J. Therm. Biol. 2019, 84, 274–284. [Google Scholar] [CrossRef] [PubMed]
- Kumar, R.; Vashishth, A.K.; Ghangas, S. Phase-lag effects in skin tissue during transient heating. Int. J. Appl. Mech. Eng. 2019, 24, 603–623. [Google Scholar] [CrossRef] [Green Version]
- Ezzat, M.A. Fractional thermo-viscoelastic response of biological tissue with variable thermal material properties. J. Therm. Stress. 2020, 43, 1120–1137. [Google Scholar] [CrossRef]
- Du, B.; Xu, G.; Xue, D.; Wang, J. Fractional thermal wave bio-heat equation based analysis for living biological tissue with non-Fourier Neumann boundary condition in laser pulse heating. Optik 2021, 247, 167811. [Google Scholar] [CrossRef]
- Youssef, H.M.; Alghamdi, N.A. Modeling of one-dimensional thermoelastic dual-phase-lag skin tissue subjected to different types of thermal loading. Sci. Rep. 2020, 10, 3399. [Google Scholar] [CrossRef] [Green Version]
- Sobhy, M.; Zenkour, A.M. Refined Lord–Shulman theory for 1D response of skin tissue under ramp-type heat. Materials 2022, 15, 6292. [Google Scholar] [CrossRef] [PubMed]
- Youssef, H.M.; Salem, R.A. The dual-phase-lag bioheat transfer of a skin tissue subjected to thermo-electrical shock. J. Eng. Therm. Sci. 2022, 2, 114–123. [Google Scholar] [CrossRef]
- Ezzat, M.A.; Alabdulhadi, M.H. Thermomechanical interactions in viscoelastic skin tissue under different theories. Indian J. Phys. 2023, 97, 47–60. [Google Scholar] [CrossRef]
- Zhang, Q.; Sun, Y.; Yang, J. Bio-heat response of skin tissue based on three-phase-lag model. Sci. Rep. 2020, 10, 16421. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Sun, Y.; Yang, J. Thermoelastic responses of biological tissue under thermal shock based on three phase lag model. Case Stud. Therm. Eng. 2021, 28, 101376. [Google Scholar] [CrossRef]
- Li, X.Y.; Li, C.L.; Xue, Z.N.; Tian, X. Analytical study of transient thermo-mechanical responses of dual-layer skin tissue with variable thermal material properties. Int. J. Therm. Sci. 2018, 124, 459–466. [Google Scholar] [CrossRef]
- Shakeriaski, F.; Ghodrat, M.; Escobedo-Diaz, J.; Behnia, M. Modified Green–Lindsay thermoelasticity wave propagation in elastic materials under thermal shocks. J. Comput. Des. Eng. 2020, 8, 36–54. [Google Scholar] [CrossRef]
- Sarkar, N.; De, S.; Sarkar, N. Modified Green–Lindsay model on the reflection and propagation of thermoelastic plane waves at an isothermal stress-free surface. Indian J. Phys. 2020, 94, 1215–1225. [Google Scholar] [CrossRef]
- Filopoulos, S.P.; Papathanasiou, T.K.; Markolefas, S.I.; Tsamasphyros, G.J. Generalized thermoelastic models for linear elastic materials with micro-structure Part I: Enhanced Green–Lindsay model. J. Therm. Stress. 2014, 37, 624–641. [Google Scholar] [CrossRef]
- Zenkour, A.M. Exact coupled solution for photothermal semiconducting beams using a refined multi-phase-lag theory. J. Opt. Laser Technol. 2020, 128, 106233. [Google Scholar] [CrossRef]
- Zenkour, A.M.; El-Mekawy, H.F. On a multi-phase-lag model of coupled thermoelasticity. Int. Commun. Heat Mass Transf. 2020, 116, 104722. [Google Scholar] [CrossRef]
- Zenkour, A.M. On generalized three-phase-lag models in photo-thermoelasticity. Int. J. Appl. Mech. 2022, 14, 2250005. [Google Scholar] [CrossRef]
- Zenkour, A.M.; Mashat, D.S.; Allehaibi, A.M. Thermoelastic coupling response of an unbounded solid with a cylindrical cavity due to a moving heat source. Mathematics 2022, 10, 9. [Google Scholar] [CrossRef]
- Kutbi, M.A.; Zenkour, A.M. Refined dual-phase-lag Green–Naghdi models for thermoelastic diffusion in an infinite medium. Waves Random Complex Media 2022, 32, 947–967. [Google Scholar] [CrossRef]
- Zenkour, A.M. Thermal diffusion of an unbounded solid with a spherical cavity via refined three-phase-lag Green–Naghdi models. Indian J. Phys. 2022, 96, 1087–1104. [Google Scholar] [CrossRef]
- Zenkour, A.M.; Mashat, D.S.; Allehaibi, A.M. Magneto-thermoelastic response in an unbounded medium containing a spherical hole via multi-time-derivative thermoelasticity theories. Materials 2022, 15, 2432. [Google Scholar] [CrossRef] [PubMed]
- Tzou, D.Y. Experimental support for the lagging behavior in heat propagation. J. Thermophys. Heat Transf. 1995, 9, 686–693. [Google Scholar] [CrossRef]
- Honig, G.; Hirdes, U. A method for the numerical inversion of the Laplace transform. J. Comput. Appl. Math. 1984, 10, 113–132. [Google Scholar] [CrossRef] [Green Version]



















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zenkour, A.M.; Saeed, T.; Alnefaie, K.M. Refined Green–Lindsay Model for the Response of Skin Tissue under a Ramp-Type Heating. Mathematics 2023, 11, 1437. https://doi.org/10.3390/math11061437
Zenkour AM, Saeed T, Alnefaie KM. Refined Green–Lindsay Model for the Response of Skin Tissue under a Ramp-Type Heating. Mathematics. 2023; 11(6):1437. https://doi.org/10.3390/math11061437
Chicago/Turabian StyleZenkour, Ashraf M., Tareq Saeed, and Khadijah M. Alnefaie. 2023. "Refined Green–Lindsay Model for the Response of Skin Tissue under a Ramp-Type Heating" Mathematics 11, no. 6: 1437. https://doi.org/10.3390/math11061437
APA StyleZenkour, A. M., Saeed, T., & Alnefaie, K. M. (2023). Refined Green–Lindsay Model for the Response of Skin Tissue under a Ramp-Type Heating. Mathematics, 11(6), 1437. https://doi.org/10.3390/math11061437