
Bayesian Spatial Split-Population Survival Model with Applications to Democratic Regime Failure and Civil War Recurrence

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. (Spatial) Split-Population Survival Model
2.1. Model Development
2.2. Markov Chain Monte Carlo Estimation
- Choose a starting point , , and corresponding and , then set .
- Update , , using Gibbs sampling. The closed form of the full conditional distributions for , , are derived and defined in the Supplementary Materials.
- Update , , and using the slice sampler with stepout and shrinkage (Neal, 2003); see the Supplementary Materials for details on performing the slice sampling operation in this step.
- Update and via Metropolis–Hastings.
- Set , then return to Step 2 and repeat for K iterations.
- Choose the initial values of , and , then set .
- Update and via Metropolis–Hastings; see the Supplementary Material for the closed form of the full conditional distributions for and .
- Update , , and using the slice sampler with stepout and shrinkage, as described in the Supplementary Materials.
- Repeat Steps 2 and 3 until the chain converges.
- After M iterations, summarize the parameter estimates using posterior samples.
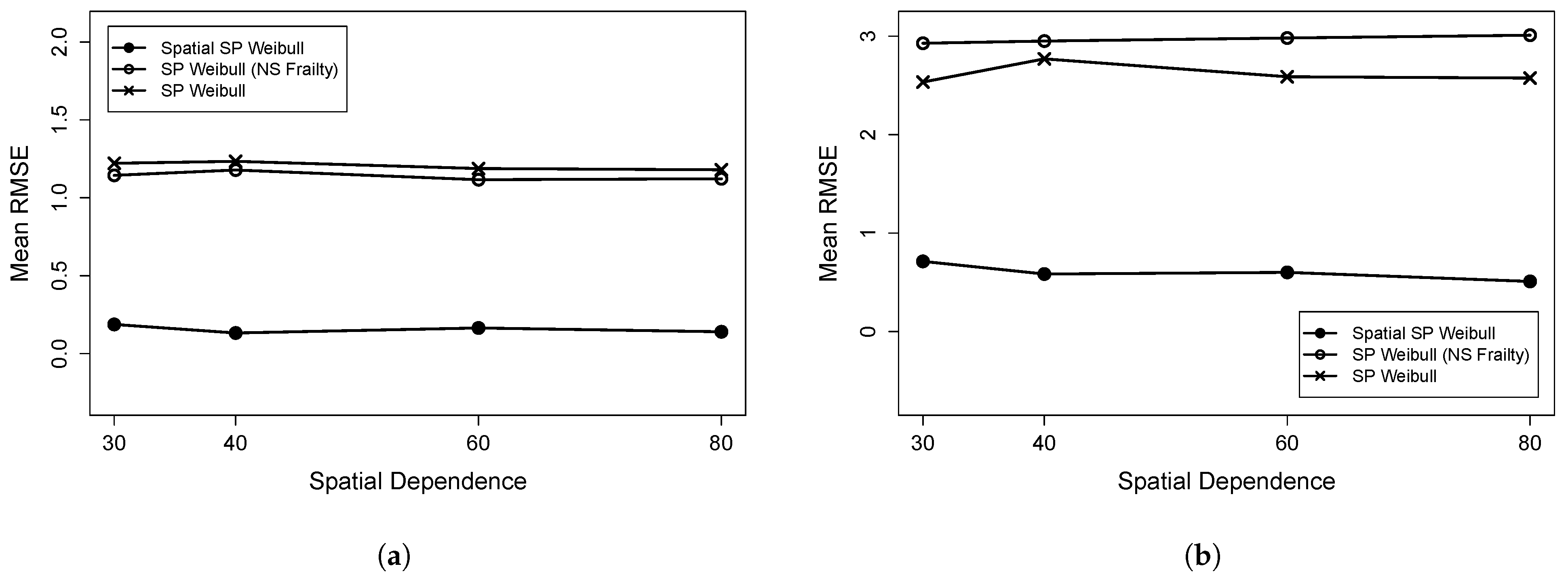
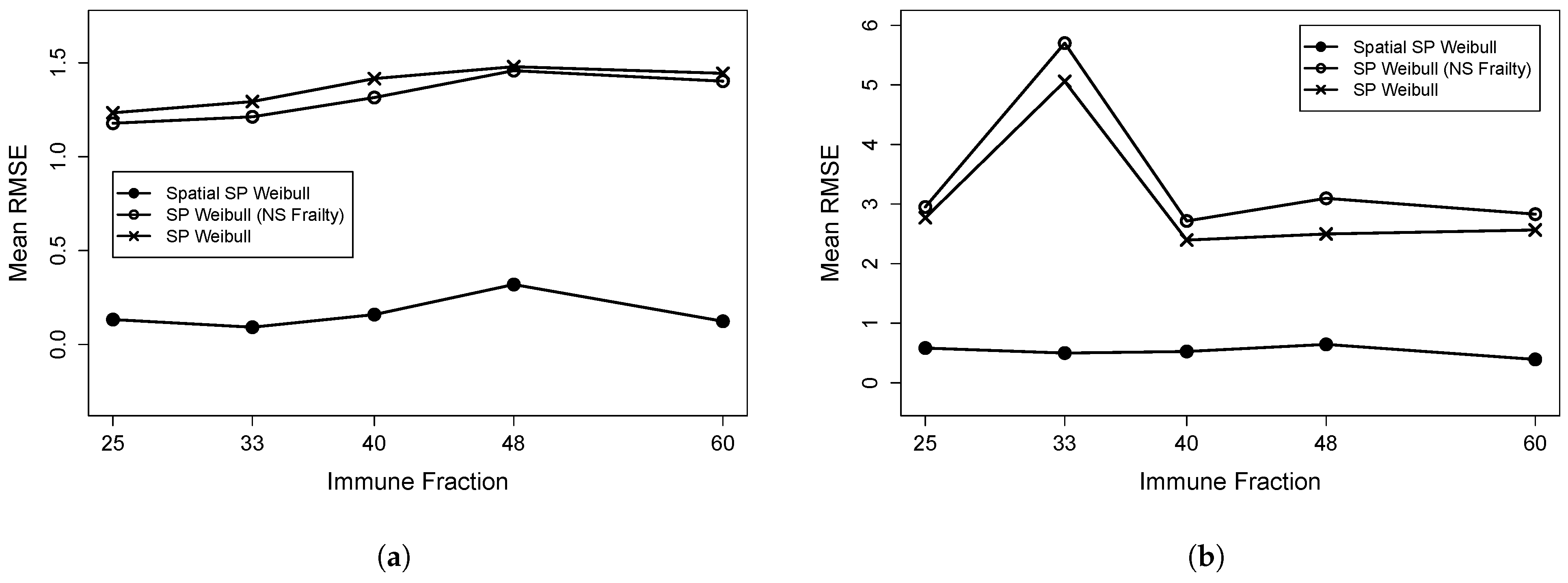
3. Monte Carlo Simulations
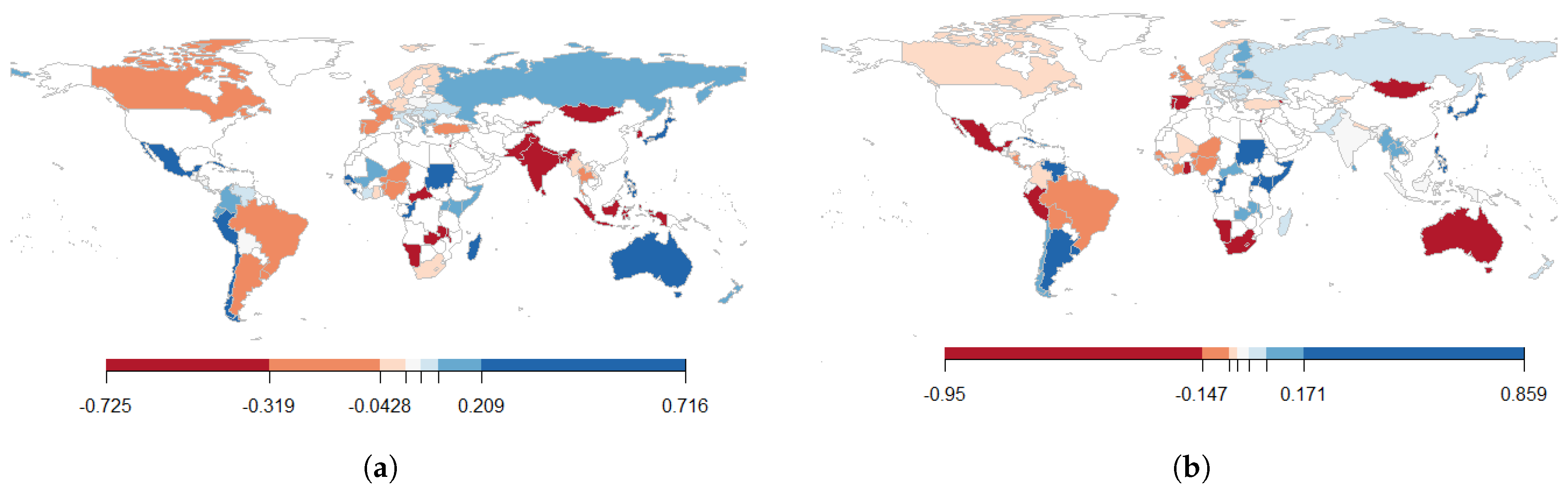
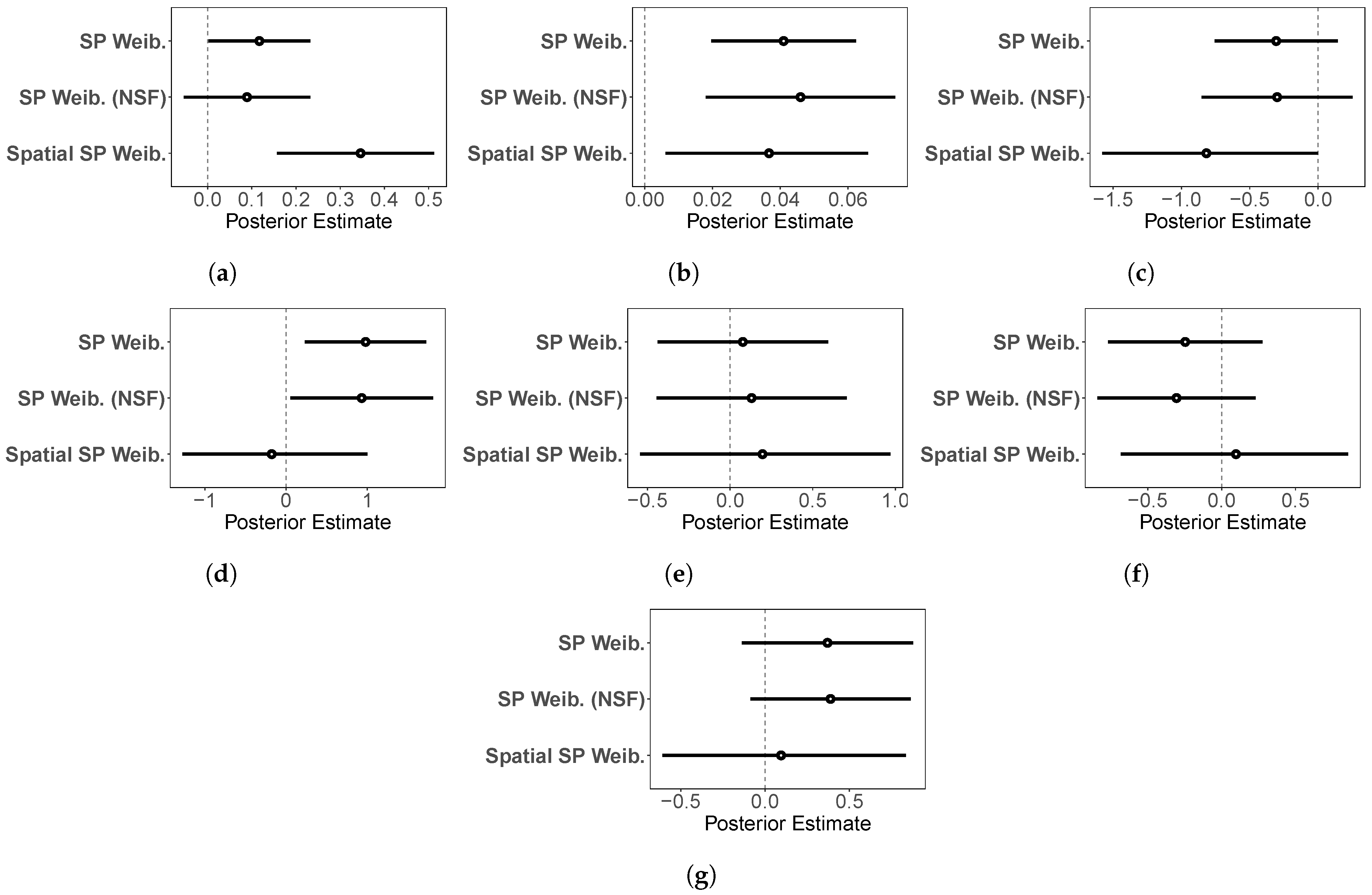
4. Empirical Applications
4.1. Democratic Consolidation and Survival
4.2. Post-Civil War Peace Duration
5. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CAR | Conditionally Autoregressive |
| CP | Convergence Probabilities |
| d.g.p. | Data Generation Process |
| i.i.d. | Independent and Identically Distributed |
| IW | Inverse Wishart |
| MC | Monte Carlo |
| MCMC | Markov Chain Monte Carlo |
| MCSE | Monte Carlo Standard Error |
| MVN | Multivariate Normal |
| NS | Non-Spatial |
| NSF | Non-Spatial Frailty |
| RMSE | Root Mean Square Error |
| SP | Split Population |
Appendix A


References
- Box-Steffensmeier, J.M.; Jones, B.S. Event History Modeling: A Guide for Social Scientists; Cambridge University Press: New York City, NY, USA, 2004. [Google Scholar]
- Wang, Y.; Klijn, J.G.; Zhang, Y.; Sieuwerts, A.M.; Look, M.P.; Yang, F.; Talantov, D.; Timmermans, M.; Meijer-van Gelder, M.E.; Yu, J.; et al. Gene-expression profiles to predict distant metastasis of lymph-node-negative primary breast cancer. Lancet 2005, 365, 671–679. [Google Scholar] [CrossRef] [PubMed]
- Bremhorst, V.; Lambert, P. Flexible estimation in cure survival models using Bayesian P-splines. Comput. Stat. Data Anal. 2016, 93, 270–284. [Google Scholar] [CrossRef]
- Clark, D.H.; Regan, P.M. Opportunities to fight: A statistical technique for modeling unobservable phenomena. J. Confl. Resolut. 2003, 47, 94–115. [Google Scholar] [CrossRef]
- Ray, R.A.; Perry, R.W.; Som, N.A.; Bartholomew, J.L. Using cure models for analyzing the influence of pathogens on salmon survival. Trans. Am. Fish. Soc. 2014, 143, 387–398. [Google Scholar] [CrossRef]
- Schmidt, P.; Witte, A.D. Predicting criminal recidivism using ‘split population’survival time models. J. Econom. 1989, 40, 141–159. [Google Scholar] [CrossRef]
- Peng, Y.; Taylor, J.M. Mixture cure model with random effects for the analysis of a multi-center tonsil cancer study. Stat. Med. 2011, 30, 211–223. [Google Scholar] [CrossRef]
- Patilea, V.; Van Keilegom, I. A general approach for cure models in survival analysis. Ann. Stat. 2020, 48, 2323–2346. [Google Scholar] [CrossRef]
- Bagozzi, B.E.; Joo, M.M.; Kim, B.; Mukherjee, B. A Bayesian Split Population Survival Model for Duration Data With Misclassified Failure Events. Political Anal. 2019, 27, 415–434. [Google Scholar] [CrossRef]
- Chiba, D.; Metternich, N.W.; Ward, M.D. Every story has a beginning, middle, and an end (but not always in that order): Predicting duration dynamics in a unified framework. Political Sci. Res. Methods 2015, 3, 515–541. [Google Scholar] [CrossRef]
- Banerjee, S.; Carlin, B.P. Parametric spatial cure rate models for interval-censored time-to-relapse data. Biometrics 2004, 60, 268–275. [Google Scholar] [CrossRef]
- Darmofal, D. Bayesian Spatial Survival Models for Political Event Processes. Am. J. Political Sci. 2009, 53, 241–257. [Google Scholar] [CrossRef]
- Darmofal, D. Spatial Analysis for the Social Sciences; Cambridge University Press: New York City, NY, USA, 2015. [Google Scholar]
- Banerjee, S.; Wall, M.M.; Carlin, B.P. Frailty Modeling for Spatially Correlated Survival Data, with Application to Infant Mortality in Minnesota. Biostatistics 2003, 4, 123–142. [Google Scholar] [CrossRef] [PubMed]
- Taylor, B.; Rowlingson, B. spatsurv: An R package for Bayesian inference with spatial survival models. J. Stat. Softw. 2017, 77, 1–32. [Google Scholar] [CrossRef]
- Muff, S.; Signer, J.; Fieberg, J. Accounting for individual-specific variation in habitat-selection studies: Efficient estimation of mixed-effects models using Bayesian or frequentist computation. J. Anim. Ecol. 2020, 89, 80–92. [Google Scholar] [CrossRef] [PubMed]
- Svolik, M. Authoritarian Reversals and Democratic Consolidation. Am. Political Sci. Rev. 2008, 102, 153–168. [Google Scholar] [CrossRef]
- Walter, B.F. Why bad governance leads to repeat civil war. J. Confl. Resolut. 2015, 59, 1242–1272. [Google Scholar] [CrossRef]
- Maller, R.A.; Zhou, X. Survival Analysis with Long-Term Survivors; Wiley: New York, NY, USA, 1996; Volume 525. [Google Scholar]
- Yin, G.; Ibrahim, J.G. Cure rate models: A unified approach. Can. J. Stat. 2005, 33, 559–570. [Google Scholar] [CrossRef]
- Beger, A.; Hill, D.W.; Metternich, N.W.; Minhas, S.; Ward, M.D. Splitting it up: The spduration split-population duration regression package for time-varying covariates. R J. 2017, 9, 474–486. [Google Scholar] [CrossRef]
- Lu, W. Efficient estimation for an accelerated failure time model with a cure fraction. Stat. Sin. 2010, 20, 661. [Google Scholar] [PubMed]
- Peng, Y.; Taylor, J. Cure models. In Handbook of Survival Analysis; Klein, J.P., Van Houwelingen, H.C., Ibrahim, J.G., Scheike, T.H., Eds.; Chapman and Hall: Boca Raton, FL, USA, 2014; pp. 113–134. [Google Scholar]
- Ibrahim, J.G.; Chen, M.H.; Sinha, D. Criterion-based methods for Bayesian model assessment. Stat. Sin. 2001, 11, 419–443. [Google Scholar]
- Bernardinelli, L.; Montomoli, C. Empirical Bayes versus fully Bayesian analysis of geographical variation in disease risk. Stat. Med. 1992, 11, 983–1007. [Google Scholar] [CrossRef] [PubMed]
- Besag, J.; York, J.; Mollié, A. Bayesian Image Restoration, with Two Applications in Spatial Statistics. Ann. Inst. Stat. Math. 1991, 43, 1–20. [Google Scholar] [CrossRef]
- Thomas, A.; Best, N.; Lunn, D.; Arnold, R.; Spiegelhalter, D. GeoBUGS User Manual, Version 1.2. Available online: http:www.mrc-bsu.cam.ac.uk/bugs/ (accessed on 15 January 2021).
- Geweke, J. Evaluating the Accuracy of Sampling-based Approaches to the Calculation of Posterior Moments. In Bayesian Statistics; Bernardo, J., Berger, J., Dawid, A., Smith, A., Eds.; Clarendon Press: Oxford, UK, 1992. [Google Scholar]
- Heidelberger, P.; Welch, P.D. Simulation run length control in the presence of an initial transient. Oper. Res. 1983, 3, 1109–1144. [Google Scholar] [CrossRef]
- Carlin, B.; Louis, T. Bayes and Empirical Bayes Methods for Data Analysis; Chapman and Hall/CRC: New York, NY, USA, 2000. [Google Scholar]
- Neal, R.M. Slice sampling. Ann. Stat. 2003, 31, 705–767. [Google Scholar] [CrossRef]
- Gasiorowski, M.J.; Power, M. The Structural Determinants of Democratic Consolidation. Comp. Political Stud. 1998, 31, 740–771. [Google Scholar] [CrossRef]
- Gassebner, M.; Lamla, M.J.; Vreeland, J.R. Extreme Bounds of Democracy. J. Confl. Resolut. 2013, 57, 171–197. [Google Scholar] [CrossRef]
- Cheibub, J.A. Presidentialism, Parliamentarism, and Democracy; University Press: Cambridge, NY, USA, 2007. [Google Scholar]
- Przeworski, A.; Alvarez, M.; Cheibub, J.A.; Limongi, F. Democracy and Development: Political Institutions and Economic Performance, 1950–1999; Cambridge University: New York City, NY, 2000. [Google Scholar]
- Treisman, D. Is Democracy in Danger? A Quick Look at the Data. Prepared for the Conference on “Democratic Backsliding and Electoral Authoritarianism. Available online: https://www.danieltreisman.org/s/draft-june-7.pdf (accessed on 8 November 2018).
- Boix, C.; Stokes, S.C. Endogenous democratization. World Politics 2003, 55, 517–549. [Google Scholar] [CrossRef]
- Przeworski, A.; Limongi, F. Modernization: Theories and facts. World Politics 1997, 49, 155–183. [Google Scholar] [CrossRef]
- Gleditsch, K.S.; Ward, M.D. Diffusion and the International Context of Democratization. Int. Organ. 2006, 60, 911–933. [Google Scholar] [CrossRef]
- Kopstein, J.S.; Reilly, D.A. Geographic Diffusion and the Transformation of the Postcommunist World. World Politics 2000, 53, 1–37. [Google Scholar] [CrossRef]
- Brinks, D.; Coppedge, M. Diffusion is no illusion: Neighbor emulation in the third wave of democracy. Comp. Political Stud. 2006, 39, 463–489. [Google Scholar] [CrossRef]
- Cliff, A.D.; Ord, J.K. Spatial Processes: Models & Applications; Pion: London, UK, 1981. [Google Scholar]
- Moran, P.A. Notes on continuous stochastic phenomena. Biometrika 1950, 37, 17–23. [Google Scholar] [CrossRef] [PubMed]
- Toft, M.D. Ending civil wars: A case for rebel victory? Int. Secur. 2010, 34, 7–36. [Google Scholar] [CrossRef]
- Licklider, R. The consequences of negotiated settlements in civil wars, 1945–1993. Am. Political Sci. Rev. 1995, 89, 681–690. [Google Scholar] [CrossRef]
- Fortna, V.P. Does peacekeeping keep peace? International intervention and the duration of peace after civil war. Int. Stud. Q. 2004, 48, 269–292. [Google Scholar] [CrossRef]
- Walter, B.F. Does conflict beget conflict? Explaining recurring civil war. J. Peace Res. 2004, 41, 371–388. [Google Scholar] [CrossRef]
- Gates, S.; Graham, B.A.; Lupu, Y.; Strand, H.; Strøm, K.W. Power sharing, protection, and peace. J. Politics 2016, 78, 512–526. [Google Scholar] [CrossRef]
- Braithwaite, A. Resisting infection: How state capacity conditions conflict contagion. J. Peace Res. 2010, 47, 311–319. [Google Scholar] [CrossRef]
- Buhaug, H.; Gleditsch, K.S. Contagion or confusion? Why conflicts cluster in space. Int. Stud. Q. 2008, 52, 215–233. [Google Scholar] [CrossRef]
- Gates, S.; Hegre, H.; Jones, M.P.; Strand, H. Institutional inconsistency and political instability: Polity duration, 1800–2000. Am. J. Political Sci. 2006, 50, 893–908. [Google Scholar] [CrossRef]
- Elbadawi, E.; Sambanis, N. Why are there so many civil wars in Africa? Understanding and preventing violent conflict. J. Afr. Econ. 2000, 9, 244–269. [Google Scholar] [CrossRef]
- Doyle, M.W.; Sambanis, N. International peacebuilding: A theoretical and quantitative analysis. Am. Political Sci. Rev. 2000, 94, 779–801. [Google Scholar] [CrossRef]
- Murdoch, J.C.; Sandler, T. Civil wars and economic growth: Spatial dispersion. Am. J. Political Sci. 2004, 48, 138–151. [Google Scholar] [CrossRef]
- Collier, P.; Elliot, V.; Hegre, H.; Hoeffler, A.; Reynal-Querol, M.; Sambanis, N. Breaking the Conflict Trap: Civil War and Development Policy; The World Bank: Washington, DC, USA, 2003. [Google Scholar]
- Walter, B.F. Designing transitions from civil war: Demobilization, democratization, and commitments to peace. Int. Secur. 1999, 24, 127–155. [Google Scholar] [CrossRef]
- Hays, J.C.; Schilling, E.U.; Boehmke, F.J. Accounting for right censoring in interdependent duration analysis. Political Anal. 2015, 23, 400–414. [Google Scholar] [CrossRef]
- Beck, N.; Gleditsch, K.S.; Beardsley, K. Space is more than geography: Using spatial econometrics in the study of political economy. Int. Stud. Q. 2006, 50, 27–44. [Google Scholar] [CrossRef]
- Franzese, R.J.; Hays, J.C. Spatial Econometric Models of Cross-Sectional Interdependence in Political Science Panel and Time-Series-Cross-Section Data. Political Anal. 2007, 15, 140–164. [Google Scholar] [CrossRef]
- Wagner, H. Bayesian estimation and stochastic model specification search for dynamic survival models. Stat. Comput. 2011, 21, 231–246. [Google Scholar] [CrossRef]
- Sparapani, R.A.; Logan, B.R.; McCulloch, R.E.; Laud, P.W. Nonparametric survival analysis using Bayesian additive regression trees (BART). Stat. Med. 2016, 35, 2741–2753. [Google Scholar] [CrossRef]
- Rizki, S.W.; Mara, M.N.; Sulistianingsih, E. Survival bayesian estimation of exponential-gamma under LINEX loss function. Proc. J. Phys. Conf. Ser. IOP 2017, 855, 012036. [Google Scholar] [CrossRef]
- Mahdizadeh, M.; Zamanzade, E. Goodness-of-fit testing for the Cauchy distribution with application to financial modeling. J. King Saud-Univ.-Sci. 2019, 31, 1167–1174. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Joo, M.M.; Bolte, B.; Huynh, N.; Mukherjee, B. Bayesian Spatial Split-Population Survival Model with Applications to Democratic Regime Failure and Civil War Recurrence. Mathematics 2023, 11, 1886. https://doi.org/10.3390/math11081886
Joo MM, Bolte B, Huynh N, Mukherjee B. Bayesian Spatial Split-Population Survival Model with Applications to Democratic Regime Failure and Civil War Recurrence. Mathematics. 2023; 11(8):1886. https://doi.org/10.3390/math11081886
Chicago/Turabian StyleJoo, Minnie M., Brandon Bolte, Nguyen Huynh, and Bumba Mukherjee. 2023. "Bayesian Spatial Split-Population Survival Model with Applications to Democratic Regime Failure and Civil War Recurrence" Mathematics 11, no. 8: 1886. https://doi.org/10.3390/math11081886
APA StyleJoo, M. M., Bolte, B., Huynh, N., & Mukherjee, B. (2023). Bayesian Spatial Split-Population Survival Model with Applications to Democratic Regime Failure and Civil War Recurrence. Mathematics, 11(8), 1886. https://doi.org/10.3390/math11081886