
Guaranteed H∞ Performance of Switched Systems with State Delays: A Novel Low-Conservative Constrained Model Predictive Control Strategy


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- In an optimal design, a cost function with an infinite horizon is defined. Converting the problem of minimizing this cost function with the existence of the state delay in the switched system to the LMI optimization problem is challenging. This problem has been solved by establishing the relationship between the cost function and the multiple Lyapunov–Krasovskii stability condition.
- The Lyapunov–Krasovskii stability condition on the prediction horizon has to be transformed into an LMI Lyapunov–Krasovskii stability constraint in order to be used in the online design. The complexity of this transformation, which is due to the state delay and exogenous disturbance conditions, is reduced by utilizing the suitable lemma and changing the variables.
- In an online design, the multiple Lyapunov–Krasovskii stability condition is considered on the predictive horizon. To design a class of switching signal, it is necessary to ensure multiple Lyapunov–Krasovskii stability conditions in actual time steps. This problem is solved by analyzing the optimization problem between two consecutive time steps.
- In an online design, it is challenging to ensure H∞ performance. To overcome this problem, in this paper, first, an online low-conservative framework was developed to apply the controller constraints at each time step. These constraints are computed at each time step based on the prediction steps. Therefore, it is necessary to investigate whether these constraints are also valid at actual time steps. Finally, by creating a proper relationship between the constraints in the actual time steps and the parameters of the PDT scheme, a non-weighted H∞ performance is guaranteed. In fact, to guarantee the H∞ performance, it is necessary to have the concurrent development of the controller and the switching rule.
2. Problem Formulation and Preliminaries
- (1)
- A closed-loop switched system, in which is satisfied, is asymptotically stable with , where is a class of -functions.
- (2)
- With zero initial conditions, is held for all nonzero , in which is a positive constant.
3. Main Results
4. Numerical Simulations
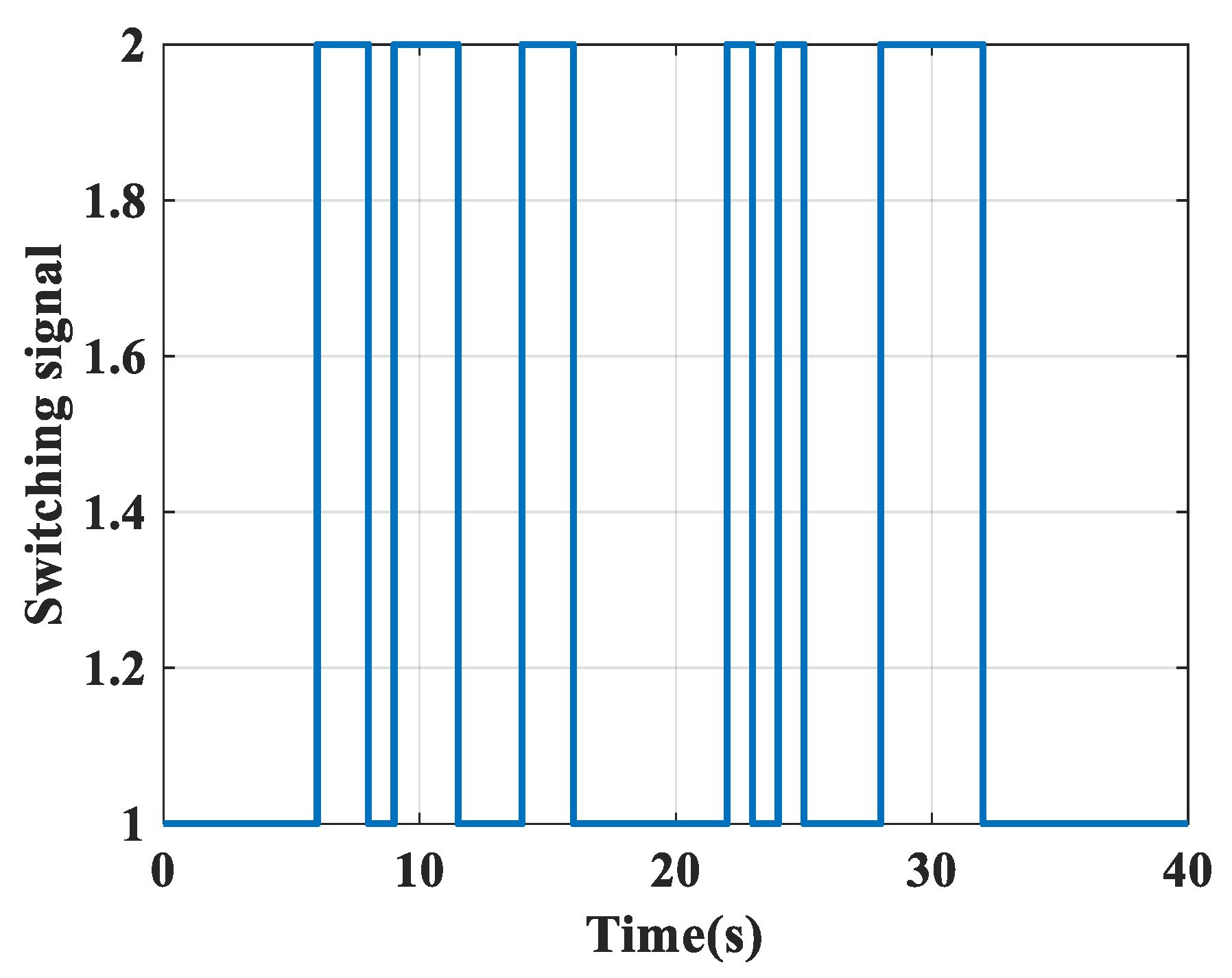
4.1. Design of the PDT Switching Signal
4.2. Calculation of the Disturbance Attenuation Level
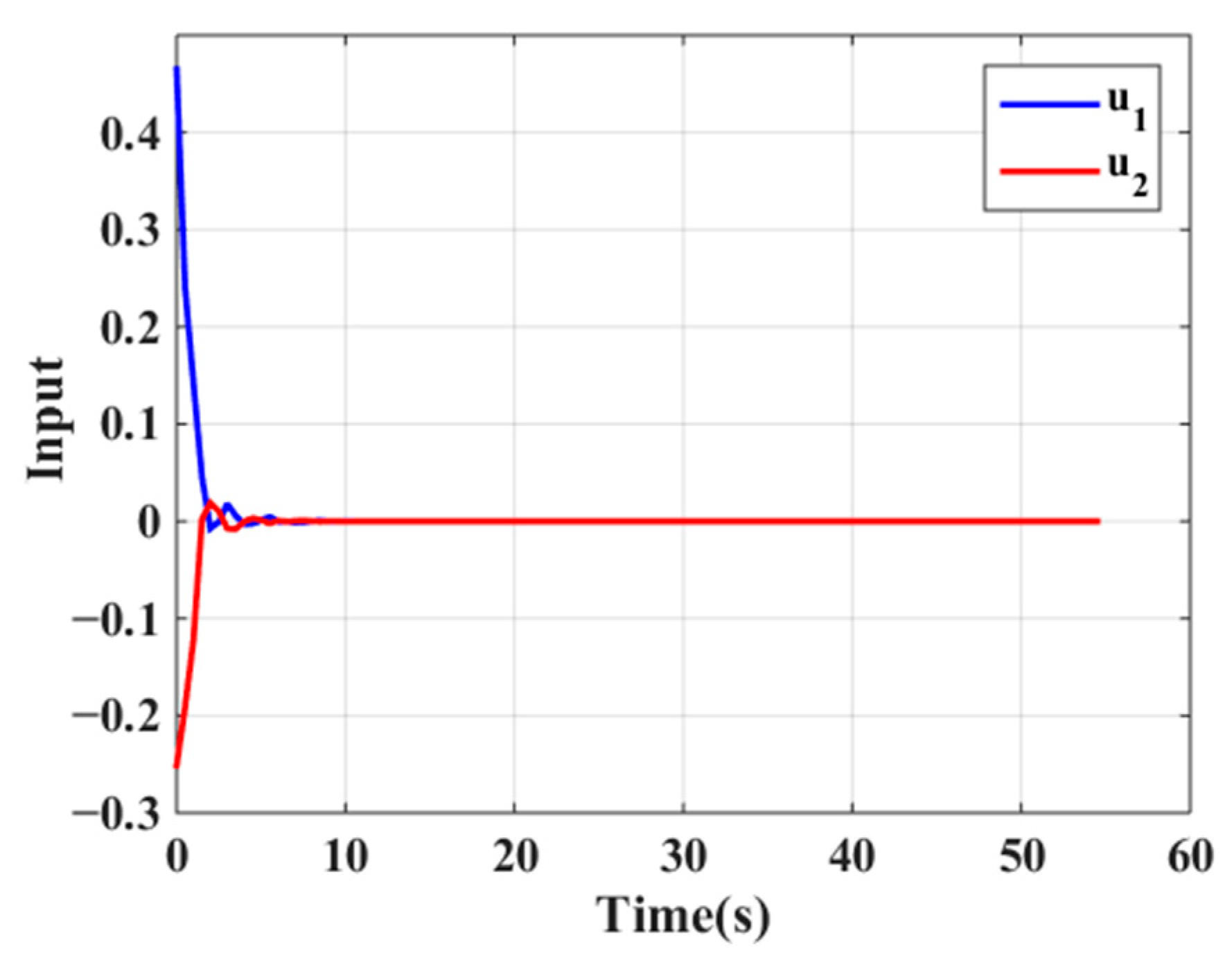
4.3. Simulation of the Model Predictive Controller
4.4. Design of the PDT Switching Signal
4.5. Calculation of the Disturbance Attenuation Level
4.6. Simulation of the Model Predictive Controller
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
- (1)
- Proof of asymptotical stability with and
- (2)
- Proof of with and
Appendix B
References
- Wang, H.; Wu, X.; Zheng, X.; Yuan, X. Model Predictive Current Control of Nine-Phase Open-End Winding PMSMs with an Online Virtual Vector Synthesis Strategy. IEEE Trans. Ind. Electron. 2022, 7, 2199–2208. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C. Virtual-Vector-Based Robust Predictive Current Control for Dual Three-Phase PMSM. IEEE Trans. Ind. Electron. 2021, 68, 2048–2058. [Google Scholar] [CrossRef]
- Yang, H.; Jiang, B.; Cocquempot, V. A survey of results and perspectives on stabilization of switched nonlinear systems with unstable modes. Nonlinear Anal. Hybrid Syst. 2014, 13, 45–60. [Google Scholar] [CrossRef]
- Kai, Y.; Ji, J.; Yin, Z. Study of the generalization of regularized long-wave equation. Nonlinear Dyn. 2022, 107, 2745–2752. [Google Scholar] [CrossRef]
- Lin, H.; Antsaklis, P.J. Stability and stabilizability of switched linear systems: A survey of recent results. IEEE Trans. Autom. Control 2009, 54, 308–322. [Google Scholar] [CrossRef]
- Mhaskar, P.; El-Farra, N.H.; Christofides, P.D. Robust predictive control of switched systems: Satisfying uncertain schedules subject to state and control constraints. Int. J. Adapt. Control Signal Process. 2008, 22, 161–179. [Google Scholar] [CrossRef]
- Ban, J.; Kwon, W.; Won, S.; Kim, S. Robust H∞ finite-time control for discrete-time polytopic uncertain switched linear systems. Nonlinear Anal. Hybrid Syst. 2018, 29, 348–362. [Google Scholar] [CrossRef]
- Zhang, H.; Xie, D.; Zhang, D.; Wang, G. Stability analysis for discrete-time switched systems with unstable sub-systems by a mode-dependent average dwell-time approach. ISA Trans. 2014, 53, 1081–1086. [Google Scholar] [CrossRef]
- Mhaskar, P.; El-Farra, N.H.; Christofides, P.D. Predictive control of switched nonlinear systems with scheduled mode transitions. IEEE Trans. Autom. Control 2005, 50, 1670–1680. [Google Scholar] [CrossRef]
- Bagherzadeh, M.; Ghaisari, J.; Askari, J. Robust exponential stability and stabilisation of parametric uncertain switched linear systems under arbitrary switching. IET Control Theory Appl. 2016, 10, 381–390. [Google Scholar] [CrossRef]
- Ding, D.W.; Yang, G.H. Static output feedback for discrete-time switched linear systems under arbitrary switching. Int. J. Control Autom. Syst. 2010, 8, 220–227. [Google Scholar] [CrossRef]
- Shi, S.; Fei, Z.; Li, J. Finite-time H∞ control of switched systems with mode-dependent average dwell-time. J. Frankl. Inst. 2016, 353, 221–234. [Google Scholar] [CrossRef]
- Ebadollahi, S.; Saki, S. Wind turbine torque oscillation reduction using soft switching multiple model predictive control based on the gap metric and Kalman filter estimator. IEEE Trans. Ind. Electron. 2017, 65, 3890–3898. [Google Scholar] [CrossRef]
- Kersting, S.; Buss, M. Direct and indirect model reference adaptive control for multivariable piecewise affine systems. IEEE Trans. Autom. Control 2017, 62, 5634–5649. [Google Scholar] [CrossRef]
- Zhao, X.; Yin, Y.; Yang, H.; Li, R. Adaptive control for a class of switched linear systems using state-dependent switching. Circuits Syst. Signal Process. 2015, 34, 3681–3695. [Google Scholar] [CrossRef]
- Liu, T.; Wang, C. Quasi-time-dependent asynchronous H∞ control of discrete-time switched systems with mode-dependent persistent dwell-time. Eur. J. Control 2019, 48, 66–73. [Google Scholar] [CrossRef]
- Shi, S.; Shi, Z.; Fei, Z. Asynchronous control for switched systems by using persistent dwell-time modeling. Syst. Control Lett. 2019, 133, 104523. [Google Scholar] [CrossRef]
- Fan, Y.; Wang, M.; Sun, G.; Yi, W.; Liu, G. Quasi-time-dependent robust H∞ static output feedback control for uncertain discrete-time switched systems with mode-dependent persistent dwell-time. J. Frankl. Inst. 2020, 357, 10329–10352. [Google Scholar] [CrossRef]
- Notash, F.Y.; Rodriguez, J.; Tohidi, S. One beat delay predictive current control of a reduced-switch 3-Level VSI-fed IPMSM with minimized torque ripple. In Proceedings of the 2021 IEEE International Conference on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Jinan, China, 20–22 November 2021; pp. 519–523. [Google Scholar]
- Alanazi, M.; Salem, M.; Sabzalian, M.H.; Prabaharan, N.; Ueda, S.; Senjyu, T. Designing a new controller in the operation of the hybrid PV-BESS system to improve the transient stability. IEEE Access 2023, 11, 97625–97640. [Google Scholar] [CrossRef]
- Chen, B.; Hu, J.; Zhao, Y.; Ghosh, B.K. Finite-Time Velocity-Free Rendezvous Control of Multiple AUV Systems with Intermittent Communication. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 6618–6629. [Google Scholar] [CrossRef]
- Ladel, A.A.; Benzaouia, A.; Outbib, R.; Ouladsine, M. Robust fault tolerant control of continuous-time switched systems: An LMI approach. Nonlinear Anal. Hybrid Syst. 2021, 39, 100950. [Google Scholar] [CrossRef]
- Hou, Y.; Tong, S. Adaptive fuzzy output-feedback control for a class of nonlinear switched systems with unmodeled dynamics. Neurocomputing 2015, 168, 200–209. [Google Scholar] [CrossRef]
- Ma, K.; Li, Z.; Liu, P.; Yang, J.; Geng, Y.; Yang, B.; Guan, X. Reliability-Constrained Throughput Optimization of Industrial Wireless Sensor Networks with Energy Harvesting Relay. IEEE Internet Things J. 2021, 8, 13343–13354. [Google Scholar] [CrossRef]
- Yang, X.; Wang, X.; Wang, S.; Wang, K.; Sial, M.B. Finite-time adaptive dynamic surface synchronization control for dual-motor servo systems with backlash and time-varying uncertainties. ISA Trans. 2023, 137, 248–262. [Google Scholar] [CrossRef]
- Morsali, P.; Dey, S.; Mallik, A.; Akturk, A. Switching modulation optimization for efficiency maximization in a single-stage series resonant DAB-based DC-AC converter. IEEE J. Emerg. Sel. Top. Power Electron. 2023, 11, 5454–5469. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, N.; Liu, Y.; Zhao, X. Adaptive fault-tolerant control for switched nonlinear systems based on command filter technique. Appl. Math. Comput. 2021, 392, 125725. [Google Scholar] [CrossRef]
- Benallouch, M.; Schutz, G.; Fiorelli, D.; Boutayeb, M. H∞ model predictive control for discrete-time switched linear systems with application to drinking water supply network. J. Process Control 2014, 24, 924–938. [Google Scholar] [CrossRef]
- Li, Q.; Lin, H.; Tan, X.; Du, S. H∞ Consensus for Multiagent-Based Supply Chain Systems Under Switching Topology and Uncertain Demands. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 4905–4918. [Google Scholar] [CrossRef]
- Yang, X.; Wang, X.; Wang, S.; Puig, V. Switching-based adaptive fault-tolerant control for uncertain nonlinear systems against actuator and sensor faults. J. Frankl. Inst. 2023, 360, 11462–11488. [Google Scholar] [CrossRef]
- Yuan, C.; Gu, Y.; Zeng, W.; Stegagno, P. Switching Model Predictive Control of Switched Linear Systems with Average Dwell-time. In Proceedings of the 2020 American Control Conference, Denver, CO, USA, 1–3 July 2020; pp. 2888–2893. [Google Scholar]
- Aminsafaee, M.; Shafiei, M.H. Stabilization of uncertain nonlinear discrete-time switched systems with state delays: A constrained robust model predictive control approach. J. Vib. Control 2019, 25, 2079–2090. [Google Scholar] [CrossRef]
- Li, S.; Chen, H.; Chen, Y.; Xiong, Y.; Song, Z. Hybrid Method with Parallel-Factor Theory, a Support Vector Machine, and Particle Filter Optimization for Intelligent Machinery Failure Identification. Machines 2023, 11, 837. [Google Scholar] [CrossRef]
- Zhang, M.; Yang, X.; Qi, Q.; Park, J.H. State Estimation of Switched Time-Delay Complex Networks with Strict Decreasing LKF. IEEE Trans. Neural Netw. Learn. Syst. 2023. early access. [Google Scholar]
- Li, L.; Yao, L. Fault Tolerant Control of Fuzzy Stochastic Distribution Systems with Packet Dropout and Time Delay. IEEE Trans. Autom. Sci. Eng. 2023. early access. [Google Scholar] [CrossRef]
- Dai, W.; Zhou, X.; Li, D.; Zhu, S.; Wang, X. Hybrid Parallel Stochastic Configuration Networks for Industrial Data Analytics. IEEE Trans. Ind. Inform. 2022, 18, 2331–2341. [Google Scholar] [CrossRef]
- Qi, Y.; Yu, W.; Huang, J.; Yu, Y. Model predictive control for switched systems with a novel mixed time/event-triggering mechanism. Nonlinear Anal. Hybrid Syst. 2021, 42, 101081. [Google Scholar] [CrossRef]
- Han, T.; Ge, S.; Li, T. Persistent dwell-time switched nonlinear systems: Variation paradigm and gauge design. IEEE Trans. Automat. Control 2010, 55, 321–337. [Google Scholar]
- Bao, Y.; Mohammadpour Velni, J.; Shahbakhti, M. An online transfer learning approach for identification and predictive control design with application to RCCI engines. In Proceedings of the Dynamic Systems and Control Conference, Pittsburgh, PA, USA, 4–7 October 2020; American Society of Mechanical Engineers: New York, NY, USA, 2020; Volume 84270, p. V001T21A003. [Google Scholar]
- Bao, Y.; Abbas, H.S.; Mohammadpour Velni, J. A learning-and scenario-based MPC design for nonlinear systems in LPV framework with safety and stability guarantees. Int. J. Control. 2023, 1–20. [Google Scholar] [CrossRef]
- Hu, J.; Wu, Y.; Li, T.; Ghosh, B.K. Consensus Control of General Linear Multiagent Systems with Antagonistic Interactions and Communication Noises. IEEE Trans. Autom. Control 2019, 64, 2122–2127. [Google Scholar] [CrossRef]
- Yang, X.; Feng, G.; He, C.; Cao, J. Event-Triggered Dynamic Output Quantization Control of Switched T–S Fuzzy Systems with Unstable Modes. IEEE Trans. Fuzzy Syst. 2022, 30, 4201–4210. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hassan, Y.F.; Zarkani, M.K.H.; Alali, M.J.; Daealhaq, H.; Chaoui, H. Guaranteed H∞ Performance of Switched Systems with State Delays: A Novel Low-Conservative Constrained Model Predictive Control Strategy. Mathematics 2024, 12, 246. https://doi.org/10.3390/math12020246
Hassan YF, Zarkani MKH, Alali MJ, Daealhaq H, Chaoui H. Guaranteed H∞ Performance of Switched Systems with State Delays: A Novel Low-Conservative Constrained Model Predictive Control Strategy. Mathematics. 2024; 12(2):246. https://doi.org/10.3390/math12020246
Chicago/Turabian StyleHassan, Yasser Falah, Mahmood Khalid Hadi Zarkani, Mohammed Jasim Alali, Haitham Daealhaq, and Hicham Chaoui. 2024. "Guaranteed H∞ Performance of Switched Systems with State Delays: A Novel Low-Conservative Constrained Model Predictive Control Strategy" Mathematics 12, no. 2: 246. https://doi.org/10.3390/math12020246
APA StyleHassan, Y. F., Zarkani, M. K. H., Alali, M. J., Daealhaq, H., & Chaoui, H. (2024). Guaranteed H∞ Performance of Switched Systems with State Delays: A Novel Low-Conservative Constrained Model Predictive Control Strategy. Mathematics, 12(2), 246. https://doi.org/10.3390/math12020246