
Gaussian Mixture Estimation from Lower-Dimensional Data with Application to PET Imaging


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Gaussian Estimation from PET Data
2.1. Estimation of
2.2. Estimation of
3. Gaussian Mixtures in PET Imaging
3.1. Gaussian Mixture Model
3.2. EM-like Algorithm
- E:
- Given a set of parameters , calculate the probability that each observation originated from the k-th component:These probabilities are sometimes also called responsibilities, or posterior probabilities.
- M:
- Given the set of probabilities , estimate the parameters of each component. This step is named after the maximum likelihood method that is used to estimate the parameters.
3.2.1. Initialization
- Each line is initially randomly assigned to exactly one component, while ensuring that each component has approximately the same number of lines.
- Mean vectors of each component are estimated as described in Section 2.
- Lines are reassigned to the component whose estimated mean vectors are nearest to them in terms of Euclidean distance. In this step, we still adhere to the so-called hard classification; i.e., each line is assigned to only one component.Steps 2 and 3 are repeated until the changes in mean vectors are sufficiently small.
3.2.2. E Step
- A Gaussian distribution retains properties when rotated.
- Marginal distributions of a Gaussian are again Gaussian.
3.2.3. M-like Step
- Find the nearest points to the (previous iterations’) center for each line.
- Calculate the weighted mean and covariance of with probabilities h as weights:
- Calculate from as in Section 2.
- Mixture weights are calculated, as in the original EM algorithm, as the proportion of all lines (events) assigned to each component: .
4. Experiments and Results
4.1. Single-Component Estimation
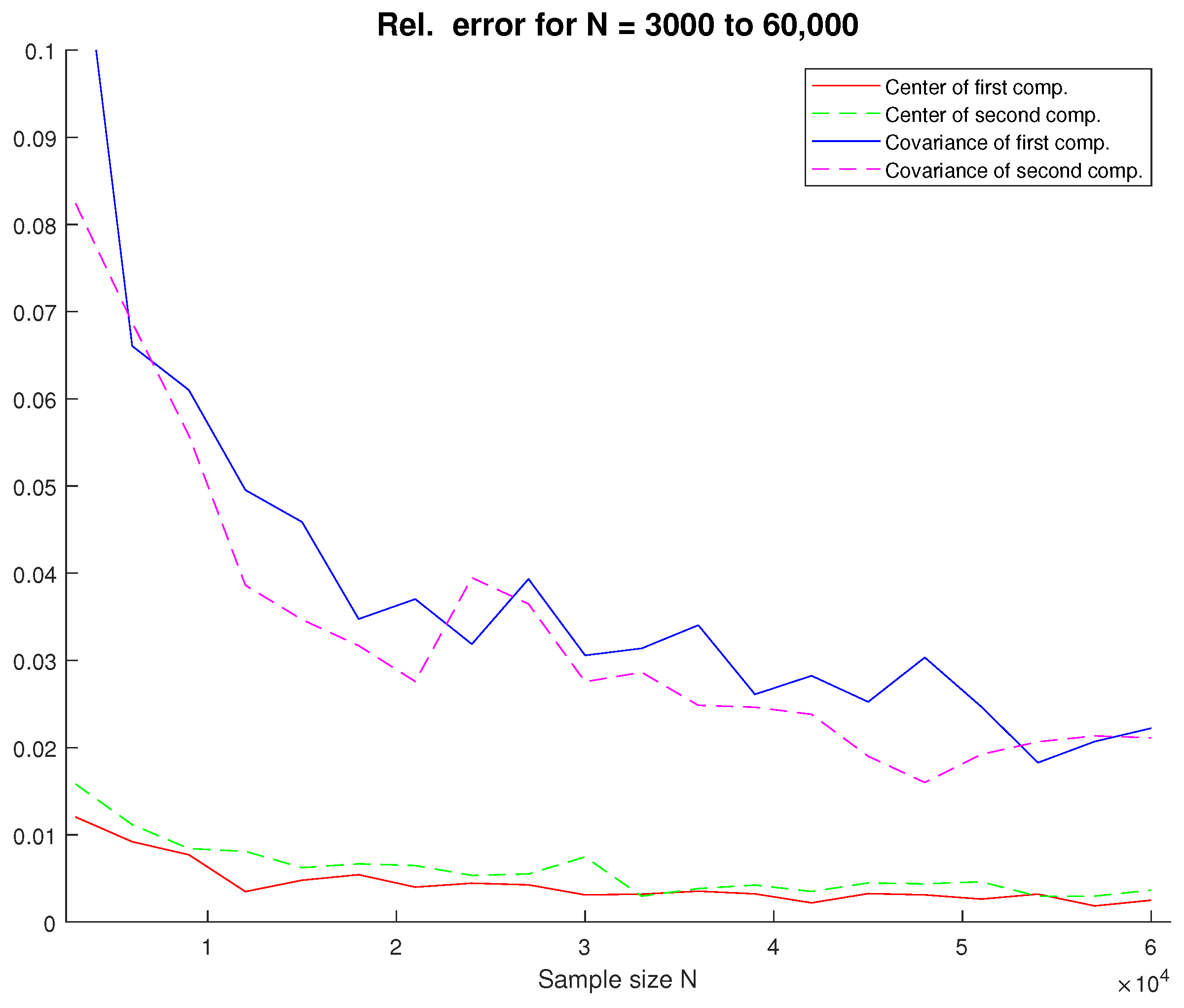
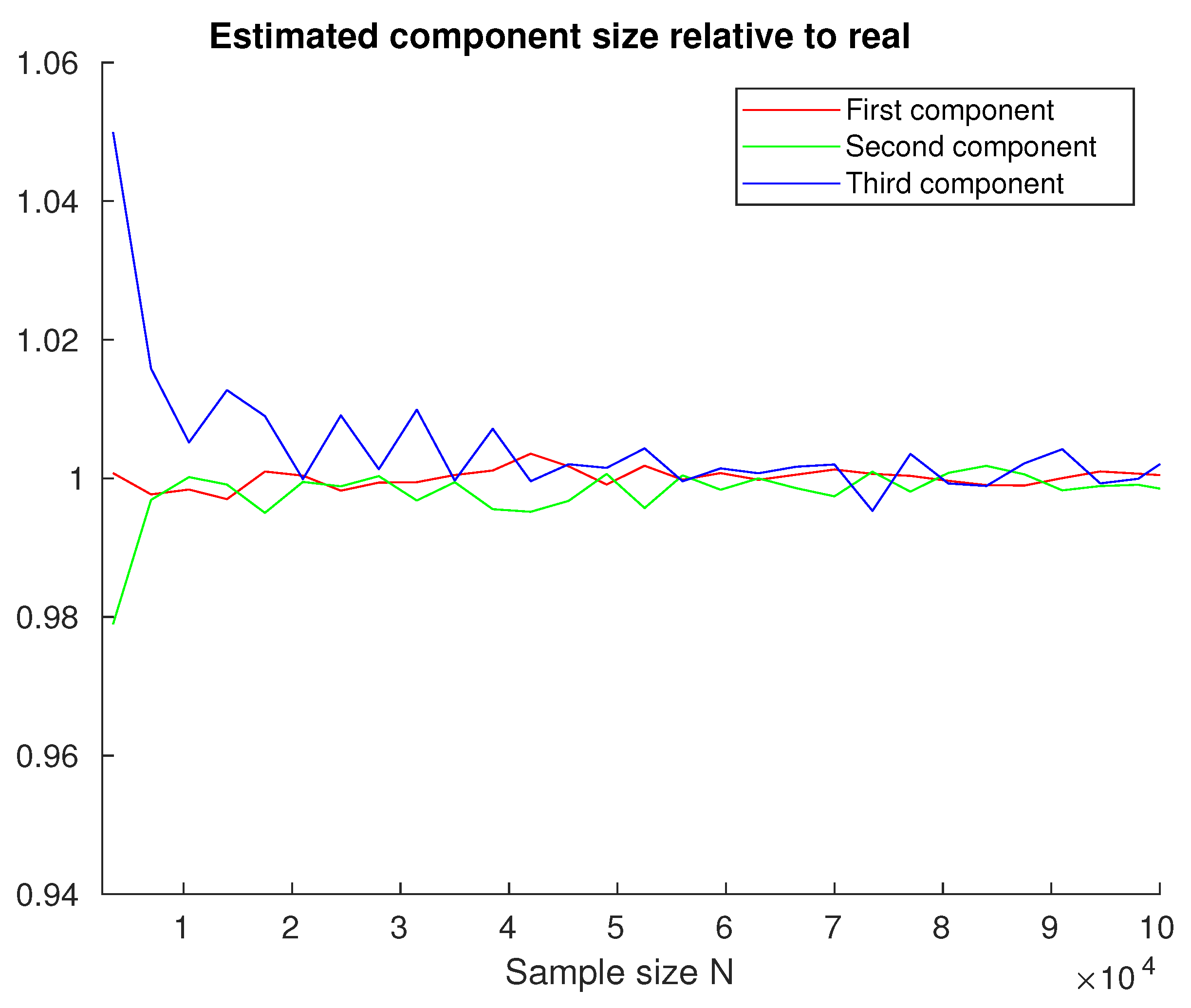
4.2. Gaussian Mixture Estimation
4.3. Noise Resistance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| PET | positron emission tomography |
| LOR | line of response |
| GMM | Gaussian mixture model |
| EM | expectation maximization |
| VOR | volume of response |
Appendix A
Appendix A.1. Different Covariances

Appendix A.2. Equal Component Sizes

Appendix A.3. Four Components

References
- Bailey, D.L.; Maisey, M.N.; Townsend, D.W.; Valk, P.E. Positron Emission Tomography; Springer: London, UK, 2005; Volume 2. [Google Scholar]
- Tong, S.; Alessio, A.M.; Kinahan, P.E. Image reconstruction for PET/CT scanners: Past achievements and future challenges. Imaging Med. 2010, 2, 529–545. [Google Scholar] [CrossRef]
- Reader, A.J.; Zaidi, H. Advances in PET image reconstruction. PET Clin. 2007, 2, 173–190. [Google Scholar] [CrossRef]
- Kinahan, P.E.; Defrise, M.; Clackdoyle, R. Analytic image reconstruction methods. In Emission Tomography; Elsevier: Amsterdam, The Netherlands, 2004; pp. 421–442. [Google Scholar]
- Natterer, F. The Mathematics of Computerized Tomography; Siam: Philadelphia, PA, USA, 1986; Volume 32. [Google Scholar] [CrossRef]
- O’Sullivan, F.; Pawitan, Y. Multidimensional Density Estimation by Tomography. J. R. Stat. Soc. Ser. B Methodol. 1993, 55, 509–521. [Google Scholar] [CrossRef]
- Singh, S.; Kalra, M.K.; Hsieh, J.; Licato, P.E.; Do, S.; Pien, H.H.; Blake, M.A. Abdominal CT: Comparison of adaptive statistical iterative and filtered back projection reconstruction techniques. Radiology 2010, 257, 373–383. [Google Scholar] [CrossRef] [PubMed]
- Alessio, A.; Kinahan, P. PET image reconstruction. Nucl. Med. 2006, 1, 4095–4103. [Google Scholar] [CrossRef]
- Ahn, S.; Leahy, R.M. Analysis of resolution and noise properties of nonquadratically regularized image reconstruction methods for PET. IEEE Trans. Med. Imaging 2008, 27, 413–424. [Google Scholar] [PubMed]
- Zaidi, H.; Montandon, M.L.; Alavi, A. Advances in attenuation correction techniques in PET. PET Clin. 2007, 2, 191–217. [Google Scholar] [CrossRef] [PubMed]
- Chow, P.L.; Rannou, F.R.; Chatziioannou, A.F. Attenuation correction for small animal PET tomographs. Phys. Med. Biol. 2005, 50, 1837. [Google Scholar] [CrossRef] [PubMed]
- Mincke, J.; Courtyn, J.; Vanhove, C.; Vandenberghe, S.; Steppe, K. Guide to plant-pet imaging using 11CO2. Front. Plant Sci. 2021, 12, 602550. [Google Scholar] [CrossRef] [PubMed]
- Levitan, E.; Herman, G.T. A Maximum a Posteriori Probability Expectation Maximization Algorithm for Image Reconstruction in Emission Tomography. IEEE Trans. Med. Imaging 1987, 6, 185–192. [Google Scholar] [CrossRef]
- Lewitt, R.M.; Matej, S. Overview of methods for image reconstruction from projections in emission computed tomography. Proc. IEEE 2003, 91, 1588–1611. [Google Scholar] [CrossRef]
- Leahy, R.M.; Qi, J. Statistical approaches in quantitative positron emission tomography. Stat. Comput. 2000, 10, 147–165. [Google Scholar] [CrossRef]
- Meikle, S.R.; Hutton, B.F.; Bailey, D.L.; Hooper, P.K.; Fulham, M.J. Accelerated EM reconstruction in total-body PET: Potential for improving tumour detectability. Phys. Med. Biol. 1994, 39, 1689. [Google Scholar] [CrossRef] [PubMed]
- Zaidi, H.; Abdoli, M.; Fuentes, C.L.; El Naqa, I.M. Comparative methods for PET image segmentation in pharyngolaryngeal squamous cell carcinoma. Eur. J. Nucl. Med. Mol. Imaging 2012, 39, 881–891. [Google Scholar] [CrossRef] [PubMed]
- Hatt, M.; Le Rest, C.C.; Turzo, A.; Roux, C.; Visvikis, D. A fuzzy locally adaptive Bayesian segmentation approach for volume determination in PET. IEEE Trans. Med. Imaging 2009, 28, 881–893. [Google Scholar] [CrossRef] [PubMed]
- Dempster, A.P.; Laird, N.M.; Rubin, D.B. Maximum likelihood from incomplete data via the EM algorithm. J. R. Stat. Soc. B 1977, 39, 1–38. [Google Scholar] [CrossRef]
- Shepp, L.A.; Vardi, Y. Maximum likelihood reconstruction for emission tomography. IEEE Trans. Med. Imaging 1982, 1, 113–122. [Google Scholar] [CrossRef] [PubMed]
- Hudson, H.M.; Larkin, R.S. Accelerated image reconstruction using ordered subsets of projection data. IEEE Trans. Med. Imaging 1994, 13, 601–609. [Google Scholar] [CrossRef]
- Qi, J.; Leahy, R.M. Iterative reconstruction techniques in emission computed tomography. Phys. Med. Biol. 2006, 51, R541. [Google Scholar] [CrossRef]
- Kim, K.; Wu, D.; Gong, K.; Dutta, J.; Kim, J.H.; Son, Y.D.; Kim, H.K.; El Fakhri, G.; Li, Q. Penalized PET Reconstruction Using Deep Learning Prior and Local Linear Fitting. IEEE Trans. Med. Imaging 2018, 37, 1478–1487. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, B.; Wang, L.; Zu, C.; Lalush, D.S.; Lin, W.; Wu, X.; Zhou, J.; Shen, D.; Zhou, L. 3D conditional generative adversarial networks for high-quality PET image estimation at low dose. Neuroimage 2018, 174, 550–562. [Google Scholar] [CrossRef]
- Häggström, I.; Schmidtlein, C.R.; Campanella, G.; Fuchs, T.J. DeepPET: A deep encoder—Decoder network for directly solving the PET image reconstruction inverse problem. Med. Image Anal. 2019, 54, 253–262. [Google Scholar] [CrossRef]
- Vlašić, T.; Matulić, T.; Seršić, D. Estimating Uncertainty in PET Image Reconstruction via Deep Posterior Sampling. In Proceedings of the Medical Imaging with Deep Learning, Nashville, TN, USA, 10–12 July 2023; pp. 1875–1894. [Google Scholar]
- Arabi, H.; AkhavanAllaf, A.; Sanaat, A.; Shiri, I.; Zaidi, H. The promise of artificial intelligence and deep learning in PET and SPECT imaging. Phys. Medica 2021, 83, 122–137. [Google Scholar] [CrossRef] [PubMed]
- Matsubara, K.; Ibaraki, M.; Nemoto, M.; Watabe, H.; Kimura, Y. A review on AI in PET imaging. Ann. Nucl. Med. 2022, 36, 133–143. [Google Scholar] [CrossRef] [PubMed]
- Wang, G.; Ye, J.C.; De Man, B. Deep learning for tomographic image reconstruction. Nat. Mach. Intell. 2020, 2, 737–748. [Google Scholar] [CrossRef]
- Sadaghiani, M.S.; Rowe, S.P.; Sheikhbahaei, S. Applications of artificial intelligence in oncologic 18F-FDG PET/CT imaging: A systematic review. Ann. Transl. Med. 2021, 9, 823. [Google Scholar] [CrossRef] [PubMed]
- Reader, A.J.; Schramm, G. Artificial intelligence for PET image reconstruction. J. Nucl. Med. 2021, 62, 1330–1333. [Google Scholar] [CrossRef] [PubMed]
- Friedman, N.; Russell, S. Image Segmentation in Video Sequences: A Probabilistic Approach. In Proceedings of the Thirteenth Conference on Uncertainty in Artificial Intelligence, UAI’97, Providence, RI, USA, 1–3 August 1997; pp. 175–181. [Google Scholar]
- Nguyen, T.M.; Wu, Q.J. Fast and robust spatially constrained Gaussian mixture model for image segmentation. IEEE Trans. Circuits Syst. Video Technol. 2013, 23, 621–635. [Google Scholar] [CrossRef]
- Ralašić, I.; Tafro, A.; Seršić, D. Statistical Compressive Sensing for Efficient Signal Reconstruction and Classification. In Proceedings of the 2018 4th International Conference on Frontiers of Signal Processing (ICFSP), Poitiers, France, 24–27 September 2018; pp. 44–49. [Google Scholar] [CrossRef]
- Zhang, Y.; Brady, M.; Smith, S. Segmentation of brain MR images through a hidden Markov random field model and the expectation-maximization algorithm. IEEE Trans. Med. Imaging 2001, 20, 45–57. [Google Scholar] [CrossRef]
- Layer, T.; Blaickner, M.; Knäusl, B.; Georg, D.; Neuwirth, J.; Baum, R.P.; Schuchardt, C.; Wiessalla, S.; Matz, G. PET image segmentation using a Gaussian mixture model and Markov random fields. EJNMMI Phys. 2015, 2, 9. [Google Scholar] [CrossRef]
- Zhang, R.; Ye, D.H.; Pal, D.; Thibault, J.; Sauer, K.D.; Bouman, C.A. A Gaussian Mixture MRF for Model-Based Iterative Reconstruction With Applications to Low-Dose X-Ray CT. IEEE Trans. Comput. Imaging 2016, 2, 359–374. [Google Scholar] [CrossRef]
- Tafro, A.; Seršić, D.; Sović Kržić, A. 2D PET Image Reconstruction Using Robust L1 Estimation of the Gaussian Mixture Model. Informatica 2022, 33, 653–669. [Google Scholar] [CrossRef]
- Matulić, T.; Seršić, D. Accurate PET Reconstruction from Reduced Set of Measurements based on GMM. arXiv 2023, arXiv:2306.17028. [Google Scholar]
- Koščević, A.G.; Petrinović, D. Extra-low-dose 2D PET imaging. In Proceedings of the 2021 12th International Symposium on Image and Signal Processing and Analysis (ISPA), Zagreb, Croatia, 13–15 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 84–90. [Google Scholar]
- Reynolds, D. Gaussian Mixture Models. In Encyclopedia of Biometrics; Li, S.Z., Jain, A.K., Eds.; Springer: Boston, MA, USA, 2015; pp. 827–832. [Google Scholar] [CrossRef]
- Grafarend, E.W. Linear and Nonlinear Models: Fixed Effects, Random Effects, and Mixed Models; de Gruyter: Berlin, Germany, 2006. [Google Scholar]
- Matulić, T.; Seršić, D. Accurate 2D Reconstruction for PET Scanners based on the Analytical White Image Model. arXiv 2023, arXiv:2306.17652. [Google Scholar]
- Lo, Y.; Mendell, N.R.; Rubin, D.B. Testing the Number of Components in a Normal Mixture. Biometrika 2001, 88, 767–778. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tafro, A.; Seršić, D. Gaussian Mixture Estimation from Lower-Dimensional Data with Application to PET Imaging. Mathematics 2024, 12, 764. https://doi.org/10.3390/math12050764
Tafro A, Seršić D. Gaussian Mixture Estimation from Lower-Dimensional Data with Application to PET Imaging. Mathematics. 2024; 12(5):764. https://doi.org/10.3390/math12050764
Chicago/Turabian StyleTafro, Azra, and Damir Seršić. 2024. "Gaussian Mixture Estimation from Lower-Dimensional Data with Application to PET Imaging" Mathematics 12, no. 5: 764. https://doi.org/10.3390/math12050764
APA StyleTafro, A., & Seršić, D. (2024). Gaussian Mixture Estimation from Lower-Dimensional Data with Application to PET Imaging. Mathematics, 12(5), 764. https://doi.org/10.3390/math12050764