1. Introduction
In the process of ship navigation, there are many bottlenecks, such as channel navigation problems before entering container ports [
1,
2], dams [
3,
4], and canals [
5,
6] in inland waterway navigation. Locks, as important components in inland waterway transportation, are also one of the major bottlenecks in the navigation process of inland waterway transportation. Developed countries such as China, Europe, and North America have commonly used inland waterways, such as the 29 single-chamber locks upstream of the Mississippi River [
7] and the 6 locks along Belgium’s Albert Canal [
8]. China’s inland waterways host over 300 locks of various sizes, including large- and medium-sized ones [
9]. With the development of inland waterways and the consequent increase in traffic volume, some locks are experiencing capacity constraints, leading to disruptions in waterway operations. Due to the high cost and long construction cycles of inland waterway improvement and new channel crossings, optimizing ship scheduling processes stands out as an effective measure to enhance the efficiency of inland waterway navigation.
To ensure the safe and orderly flow of ships through locks, it is essential to allocate lock chambers for bidirectional ship traffic within the navigation channel. This process, known as lock scheduling, involves determining ship berthing positions within lock chambers and scheduling the start times for each lock. Traditional ship lock scheduling commonly relies on heuristic rules based on engineers’ experience to prioritize ship queues [
4,
10]. However, such methods lack scientific rigor and comprehensive consideration, especially in situations of heavy ship traffic, making effective scheduling difficult to achieve. Research on lock scheduling can be categorized into single lock scheduling and serial locks scheduling. The study by Passchyn et al. [
11] found that the single lock of the parallel chambers scheduling problem for optimizing ship waiting times is strongly NP-hard even without considering the ship placement problem. Verstichel et al. [
12] systematically considered the necessary constraints of the ship placement problem and proposed an improved best-fit heuristic two-dimensional packing algorithm to solve the ship placement problem, and the numerical simulation results showed that the heuristic algorithm has a high efficiency. Subsequently, the team utilized branch-and-bound [
13] logic-based Benders decomposition [
14] to solve the small-scale single-lock scheduling problem with parallel chambers accurately. But, these two accurate algorithms still struggle to solve the large-scale single lock of the parallel chambers scheduling problem effectively. Ji et al. [
15] regarded this problem as a coupled problem of the vehicle routing problem with ship placement scheduling and proposed an adaptive large neighborhood search and an improved best-fit algorithm. His study marked the first successful attempt to efficiently solve the large-scale single-lock scheduling problem with parallel chambers.
Inland waterways in China often leverage stepped channelization to enhance navigation conditions, resulting in the wide-spread distribution of serial locks. Studies have demonstrated that the joint scheduling of serial locks can maximize the overall capacity and service levels [
16,
17]. Compared with the single lock scheduling problem, the ship flow routes in the serial-lock system are more diverse, and the scheduling schemes of adjacent locks affect each other, so the serial-lock scheduling problem has a higher complexity. In China, there are more abundant scheduling studies for the Three Gorges-Gezhou Dam (TGD). Yuan et al. [
18] divided the TGD lock scheduling into three subproblems: lock allocation, schedule optimization, and the ship scheduling problem, and proposed a chaotic embedded particle swarm optimization algorithm to solve it. Zhang et al. [
3] proposed a multi-objective mathematical model for optimizing lock utilization, the average waiting time, and ship energy consumption in the joint scheduling problem of the TGD. They introduced a multi-objective metaheuristic algorithm (MOMA) based on fuzzy correlation entropy for solving it. Subsequently, Zheng et al. [
19] further considered the impact of the Three Gorges ship lift and approach channel on the scheduling of the TGD, and proposed a collaborative adaptive multi-objective algorithm (CAMOA) for solving it based on this foundation. All of the above studies conducted in-depth research on the navigation efficiency and green carbon emission objectives of the scheduling problem of the TGD locks, but only the special staircase lock structure of the TGD was not generalized.
In terms of the general serial-lock scheduling problem (SLSP), Smith et al. [
7] developed a discrete event simulation model for the passage of ships through five locks on the upper reaches of the Mississippi River. Prandtstetter et al. [
20] introduced a variable neighborhood search approach for optimizing the scheduling of the nine-lock system along the Austrian segment of the Danube River. Passchyn et al. [
21] proposed a mixed-integer linear programming model (MILP) with time-indexing and lockage-indexing for the SLSP. They evaluated the efficacy of the CPLEX solution model on a small-scale instance, confirming its efficiency. They analyzed the impact of scheduling rules such as first-come-first-served (FCFS) and shortest lockage service time priority, as well as the expansion and capacity enhancement of locks, on ship passage efficiency. However, the above studies did not consider the ship placement subproblem, instead simplifying this subproblem into a knapsack problem and a one-dimensional packing problem.
Ji et al. [
22] addressed this subproblem in SLSP, developing an MILP for the general SLSP from the perspectives of flexible job shop scheduling. They employed Gurobi for the exact solution of the model, and the results indicated that the model constructed from the job shop scheduling perspective exhibited a higher efficiency. Furthermore, Ji et al. [
23] proposed a decomposition algorithm framework for solving the general serial-lock scheduling problem. They introduced a heuristic solving algorithm combining a large neighborhood search and dynamic programming, effectively addressing large-scale serial-lock scheduling problems. Additionally, they analyzed the impact of factors such as ship priorities and uneven lockage capacities.
All of the previously mentioned studies aimed to improve ship crossing efficiency or lock chamber utilization without considering the environmental factors of lock scheduling. In recent years, with the continuous growth of the waterway transport volume and the increasing advocacy of the concept of low-carbon transportation, more and more scholars have focused on the problem of ship speed optimization in shipping. Unlike previous studies that usually regarded the navigation time of ships between water hubs as a parameter, these scholars considered ship speed as a variable and explored the interplay between the efficiency of navigation and the cost of “green” and low-carbon transportation [
6,
24]. Defryn et al. [
25] focused on the passage of a single ship through a single lock and investigated the impact of optimizing the speed of a single ship on other ships from a game theory perspective. Tan et al. [
26] and Buchem et al. [
27] investigated the joint schedule design and speed optimization problem for a inland waterway service using different approaches, but both focused on only one ship. Passchyn et al. [
21] studied the passage of ships through a serial-lock system with a single chamber. They developed a ship-lockage assignment model based on time discretization and analyzed the impact of optimizing ship speeds on the total ship staying time and carbon emissions. Golak et al. [
28] focused on ships passing through a serial-lock system, assuming the uninterrupted continuous operation of the locks. They constructed an MILP to optimize the total ship staying time and carbon emissions. It is worth noting that this study assumed the continuous and uninterrupted operation of the locks, with fixed start times for lockage, which may not align with real-world scheduling scenarios. Yang et al. [
5] proposed a nonlinear model with two linear approximation methods to optimize the overall cost of ship navigation from the perspective of system optimization, and the experimental results showed the necessity and effectiveness of considering the green objectives for ship navigation strategies. However, the aforementioned studies utilized overly simplified descriptions of chamber capacity, failing to address the actual ship placement issues.
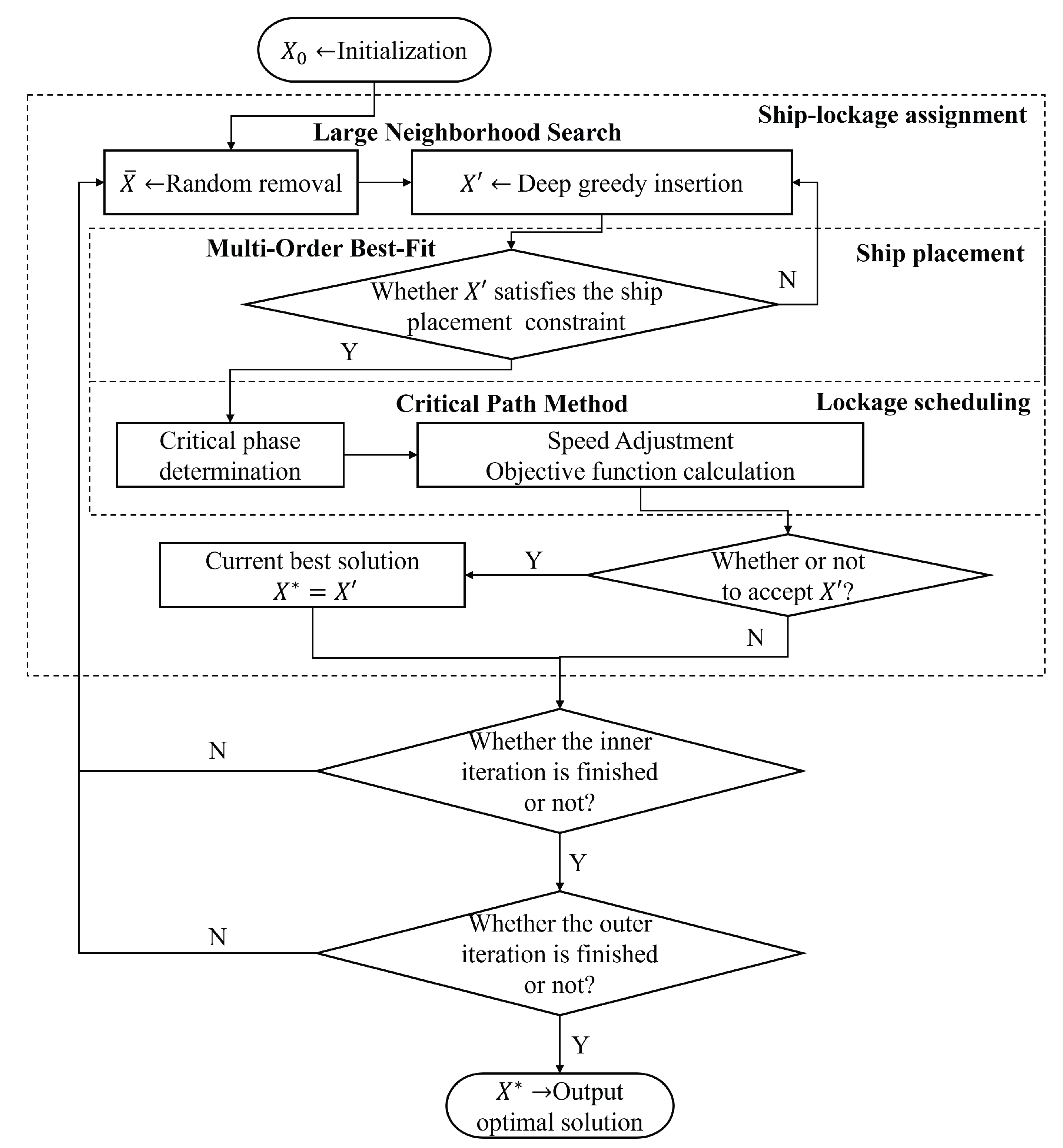
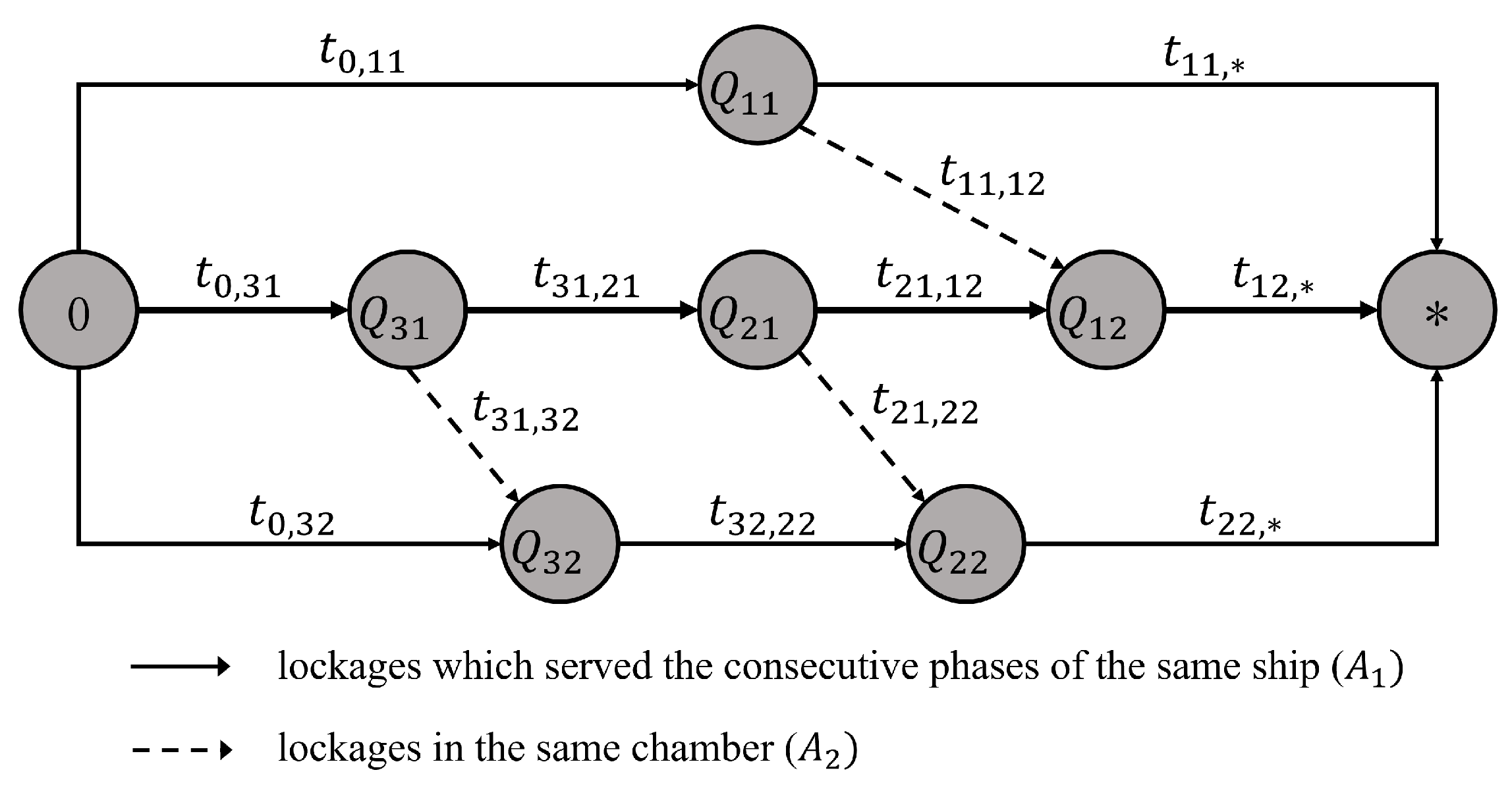
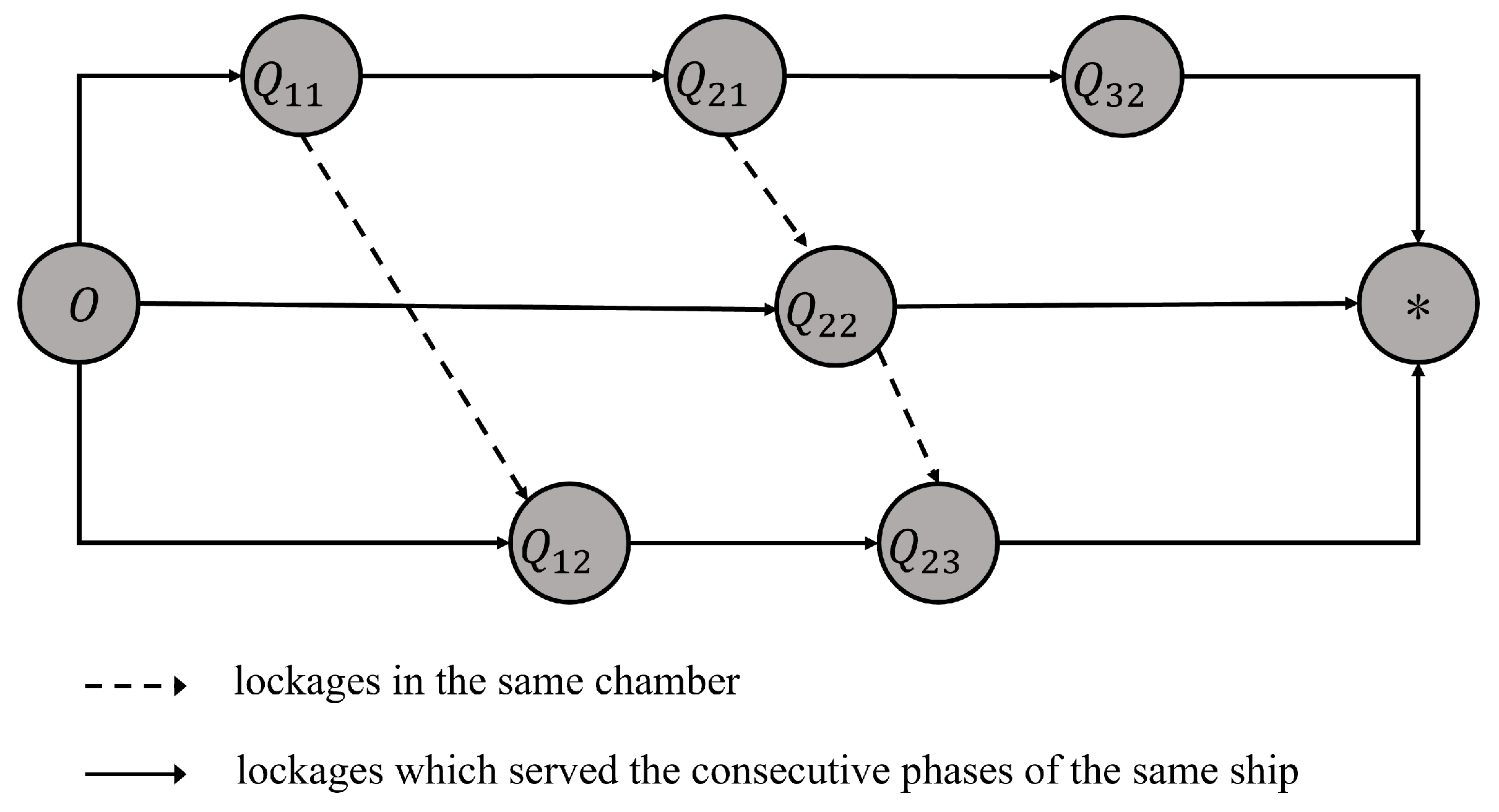
This paper investigates the green lock scheduling problem (GLSP) of ships traveling bidirectionally through serial locks, considering features such as ship placement and ship speed optimization. The objective was to minimize both total fuel emissions and total ship staying time. To address this, an MILP was constructed based on job shop scheduling theory. To efficiently solve large-scale GLSPs, the problem was decomposed into subproblems including lockage scheduling, ship placement, and ship-lockage assignment. A large neighborhood search algorithm based on a decomposition framework (LNSDF) is proposed. An innovative approach was taken to map the complex lockage scheduling subproblem, which considers ship speed optimization, into a network planning problem. The critical path method (CPM) was then employed to solve this mapped problem efficiently. Numerical experiments demonstrated that the MILP proposed in this paper can be accurately solved using CPLEX for small-scale GLSPs. Additionally, large-scale problems can be effectively resolved by the LNSDF. The sensitivity analysis indicates that the GLSP model can ensure ship passage efficiency while effectively reducing ship fuel emissions.
2. Problem Description
The green lock scheduling process studied in this paper is illustrated in
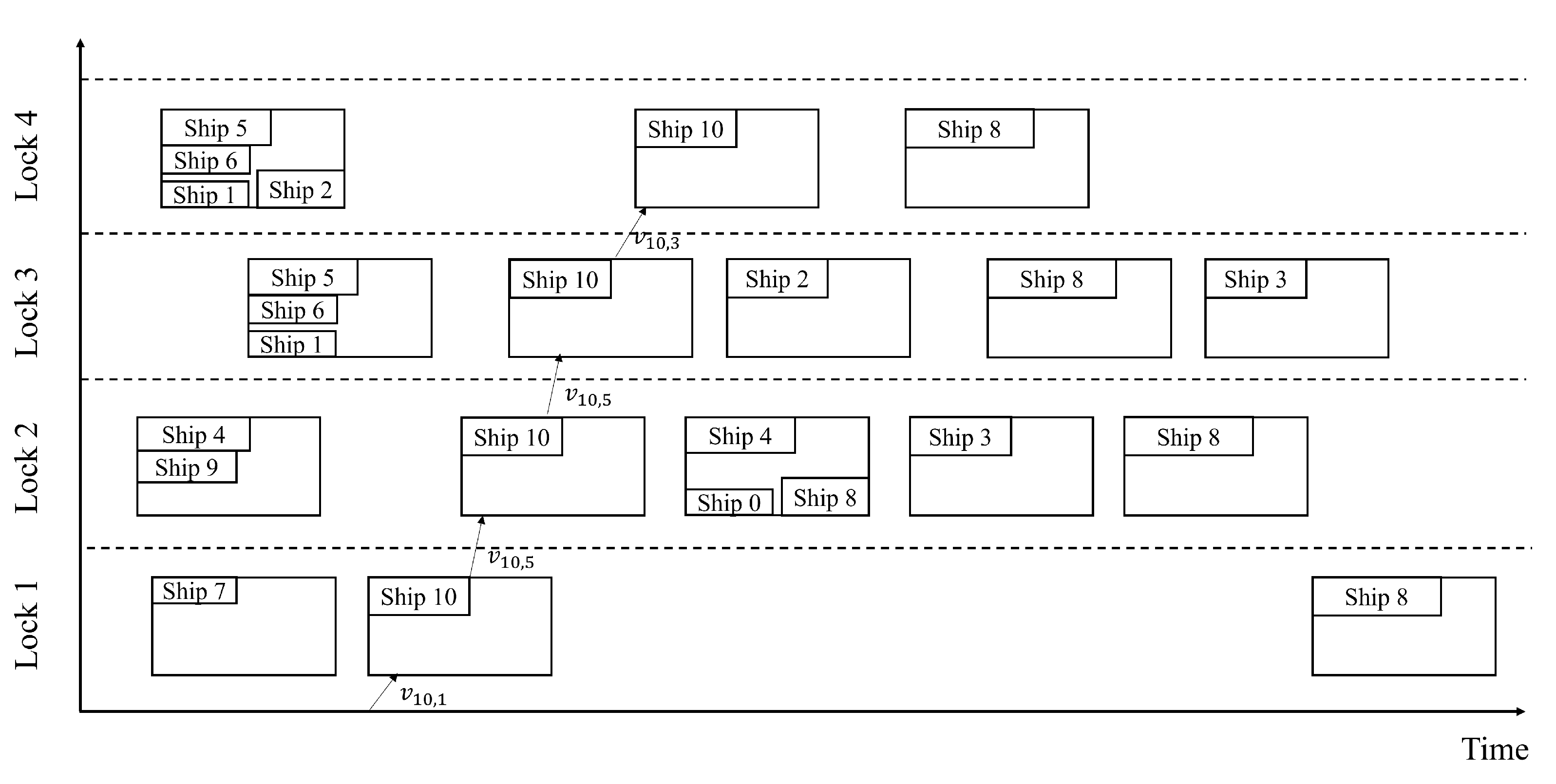
Figure 1. Several locks are distributed along the inland waterway, with each chamber being able to both provide passage services for ships traveling upstream and downstream. The properties of each chamber include its length, width, draft, and the operational time for a lockage. An additional empty lockage is required between two consecutive lockages in the same direction within the same chamber. On the waterway, there is a bidirectional flow of ship traffic distributed across different times and spaces. Ships each have fixed routes to enter or leave the series-lock systems via the main channel or tributaries. The declared information of the ship includes the length, width, locks it needs to pass, draft, tonnage, speed range, and distance to the first lock. In the scheduling process of the GLSP, the lock operator needs to make decisions on three key aspects: the allocation of ships and lockages, the determination of the optimal arrival speed of ships and the optimal opening time of lockages, and the two-dimensional placement of ships in the lock chambers. These decision-making processes are referred to as the ship-lockage allocation problem, the lock scheduling problem, and the ship placement problem, respectively. Factors to be considered throughout the decision-making process include the characteristics of each lock chamber, the declaration information provided by the ships, the two-way ship traffic flow in the channel, and operational constraints. The goal is to develop a lock operation schedule that maximizes lock efficiency and minimizes ship fuel consumption.
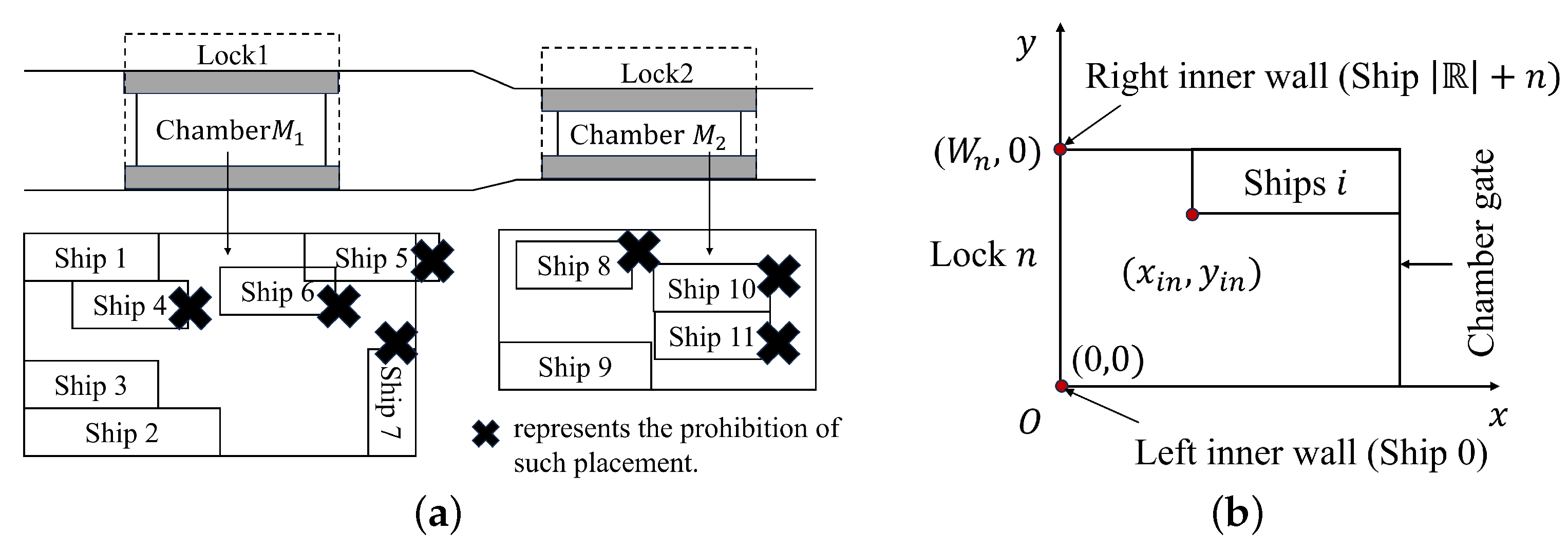
Therefore, based on these factors, the spatio-temporal constraints, such as ship attributes, lock characteristics, and operational limitations, need to be considered when addressing the GLSP. Among these, the ship placement problem requires the two-dimensional arrangement of ships within the lock chamber to be resolved. Apart from the typical two-dimensional packing constraints, safety mooring constraints for ships within the lock chamber also need to be taken into account. Specifically, as shown in
Figure 2a, besides meeting the two-dimensional packing rigidity constraint, any ship must be moored against the inner wall of the chamber or be completely moored alongside a longer ship [
12], which will be described by the model constraints in
Section 3.
6. Conclusions
This study investigates the green lock scheduling problem (GLSP) in the process of ship passage through a serial-lock system. Considering practical factors such as ship placement, an MILP was constructed with the objectives of maximizing lockage efficiency and minimizing ship navigation fuel emissions. To efficiently solve the large-scale GLSP, the problem was decomposed into ship-lockage assignment, lock scheduling, and ship placement subproblems. Based on this problem, a decomposition framework, i.e., a hybrid heuristic solving algorithm called LNSDF, based on the large neighborhood search and critical path method, was proposed.
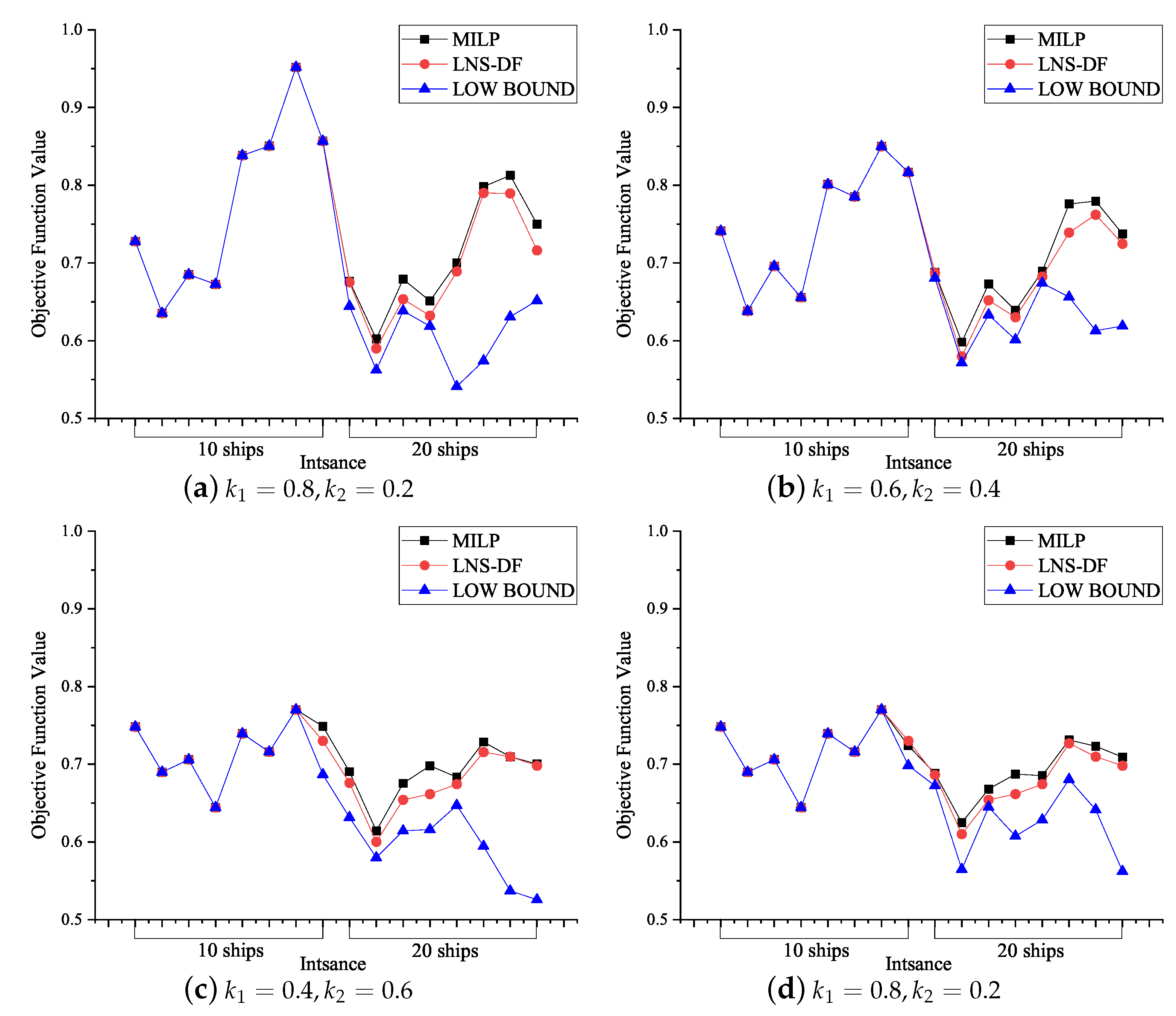
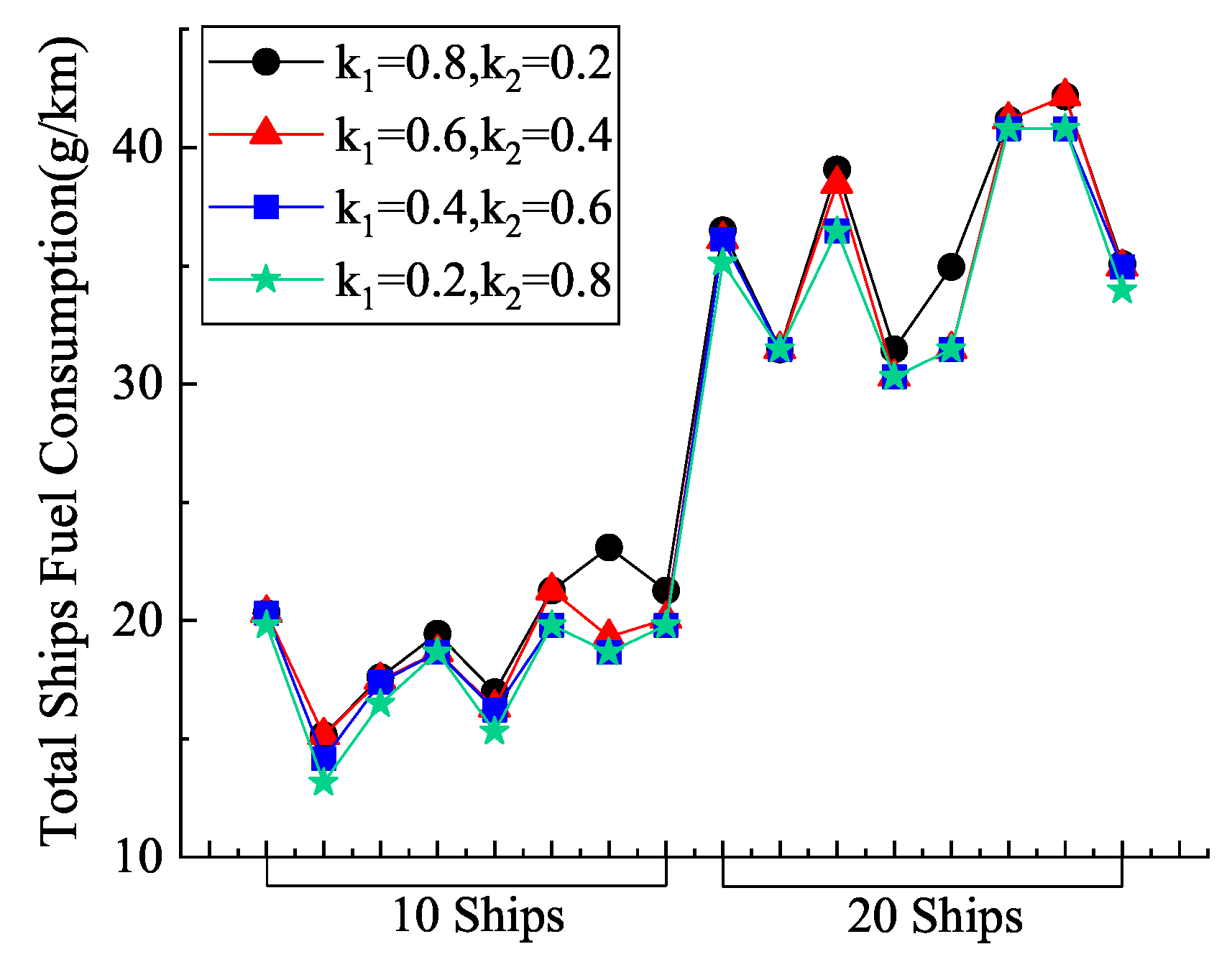
Extensive numerical simulations were conducted to validate the effectiveness of the model and algorithm proposed in this study. The results demonstrate that the MILP proposed in this paper can efficiently solve optimal solutions for small-scale problems using CPLEX. Additionally, LNSDF can achieve high-quality scheduling solutions for larger-scale GLSPs in shorter time frames. Furthermore, considering ship fuel emission objectives can better balance lockage efficiency and ship navigation fuel emissions in different traffic scenarios. Sensitivity analysis results indicate that optimizing ship speed can provide more flexible lockage services. When the lock capacity is insufficient, reducing ship speed can distribute the ship waiting time evenly throughout the navigation process, thereby reducing ship navigation fuel emissions. At the same time, for certain important ships, accelerating navigation can ensure a reduction in the waiting time at the serial-locks system, thereby expediting lockage.
This study is also subject to some limitations. Firstly, the discretization of ship speeds may result in suboptimal solutions due to the limited granularity of the decision space. Secondly, the reliance on weighted optimization for addressing both objectives introduces a significant dependency on the predetermined weights, potentially biasing the obtained solutions. To address these limitations, future research could explore alternative approaches. For instance, employing continuous optimization techniques for ship speeds could enable the exploration of a broader solution space, leading to potentially improved scheduling outcomes. Additionally, the investigation of multi-objective optimization algorithms that do not require predefined weights could offer more candidate solutions.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}