1. Introduction and Preliminaries
In this paper, we investigate the local and global character of the equilibrium point of the following second order rational difference equation
where the parameters
are nonnegative real numbers and initial conditions
and
are arbitrary nonnegative real numbers, such that
,
.
Equation (
1) is the special case of a general second order quadratic rational difference equation of the form
with nonnegative parameters and nonegative initial conditions such that
,
and
,
. Several global asymptotic results for some special cases of Equation (
2) were obtained in [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
11].
One interesting special case by (
2) is the following rational difference equation studied in [
12]:
which represents discretization of the differential equation model in biochemical networks, see [
13]. Notice that Equation (
3) is an example of a rational difference equation, such that associated map is always strictly decreasing with respect to the second variable, and changes its monotonicity with respect to the first variable, i.e., can be increasing or decreasing depending on corresponding parametric space. Also, we see that Equation (
3) is the special case of the linear rational difference equation
(which was investigated in detail in [
12]) with well known and complicated dynamics, such as Lynes’ equation (see [
14]).
There are not many papers that study in detail dynamics of the second order rational difference equations with quadratic terms such that associated map changes its monotonicity with respect to its variables. However, in [
15] the behavior of the following rational difference equation has been investigated in great detail
In both equations, (
3) and (
5), Theorems 1 and 2 were used in order to obtain the convergence results. In most cases of this paper we use the same results. However, in order to investigate the behaviour of the following four subsequences
,
,
,
that appears under the condition
where
we cannot use this method, because the associated map in this case does not have the same monotonicity with respect to its variables in invariant interval. More precisely, the corresponding map changes its monotonicity in invariant interval with respect to the first variable. Instead of that, we use the brute-force method to show that each subsequence converges to the unique equilibrium point.
In the case when associated map of Equation (
1) changes its monotonicity from “decreasing-decreasing” into “increasing-decreasing”, the problem of determining invariant interval appears. In all cases, we determine invariant interval and prove that the positive equilibrium of Equation (
1), which is always locally asymptotically stable, is globally asymptotically stable for all values of the parameters, except in the case when
(see Theorems 7–10).
The problem of determining invariant intervals in the case when the associated map changes its monotonicity with respect to its variables has been considered in [
16,
17]. Also, see [
18,
19,
20].
Now, we state several well-known results.
Theorem 1. [14] [Theorem 2.22] Let be an interval, and suppose that is a continuous function. Consider the difference equationAssume that f satisfies the following two conditions: a. is nondecreasing in for each , and is nonincreasing in for each ;
b. All solutions of the systemsatisfy . Then, (6) has a unique equilibrium and every solution of (6) converges to Theorem 2. [12] [Theorem 1.4.7] Let be an interval, and suppose that is a continuous function satisfying the following properties: a. is nonincreasing in each of its arguments;
b. If is a solution of the systemthen . Then, (6) has a unique equilibrium and every solution of (6) converges to Theorem 3. [21] [Theorem 1.4] Let f be the function from (6) with - 1.
;
- 2.
is nonincreasing in u and v respectively;
- 3.
is nondecreasing in x;
- 4.
Equation (6) has a unique positive equilibrium .
Then, every positive solution of Equation (6) which is bounded from above and from below by positive constants converges to . Theorem 4. [12] [Theorem 1.7.2] Assume that and that is decreasing in both arguments. Let be a positive equilibrium of Equation (6). Then, every oscillatory solution of Equation (6) has semicycles of length at most two. Theorem 5. [12] [Theorem 1.7.4] Assume that is such that: is increasing in x for each fixed y, and is decreasing in y for each fixed x. Let be a positive equilibrium of Equation (6). Then, except for the first semicycle, every oscillatory solution of Equation (6) has semicycles of length at least two. 3. Global Attractivity Results
In this section, we prove several global attractivity results in the corresponding parametric space.
We notice that the sign of the partial derivative with respect to the first variable at the equilibrium point depends on the sign of the .
, In this case, the function f is increasing in the first variable and decreasing in the second variable.
Lemma 3. If or or , then the system of algebraic equationshas a unique solution . Proof. System (
13) is of the form
that is
By subtracting Equations (14) and (15), we obtain
If , then system (13) has a unique solution .
Suppose that
and
. Then
By adding Equations (14) and (15), we have
from which, by using (
16), we have
Now, we see that Equation (
17) has no positive solutions
if
This means that system (
13) has a unique solution
in this case.
Assume that
. By substituting (
16) into (
17) we obtain quadratic equation
with solutions
It is easy to see that
when
, which means that system (
13) has a unique solution
in this case. Similarly, if
, then
.
Finally, if
, then system (
13) has more than one positive solution. □
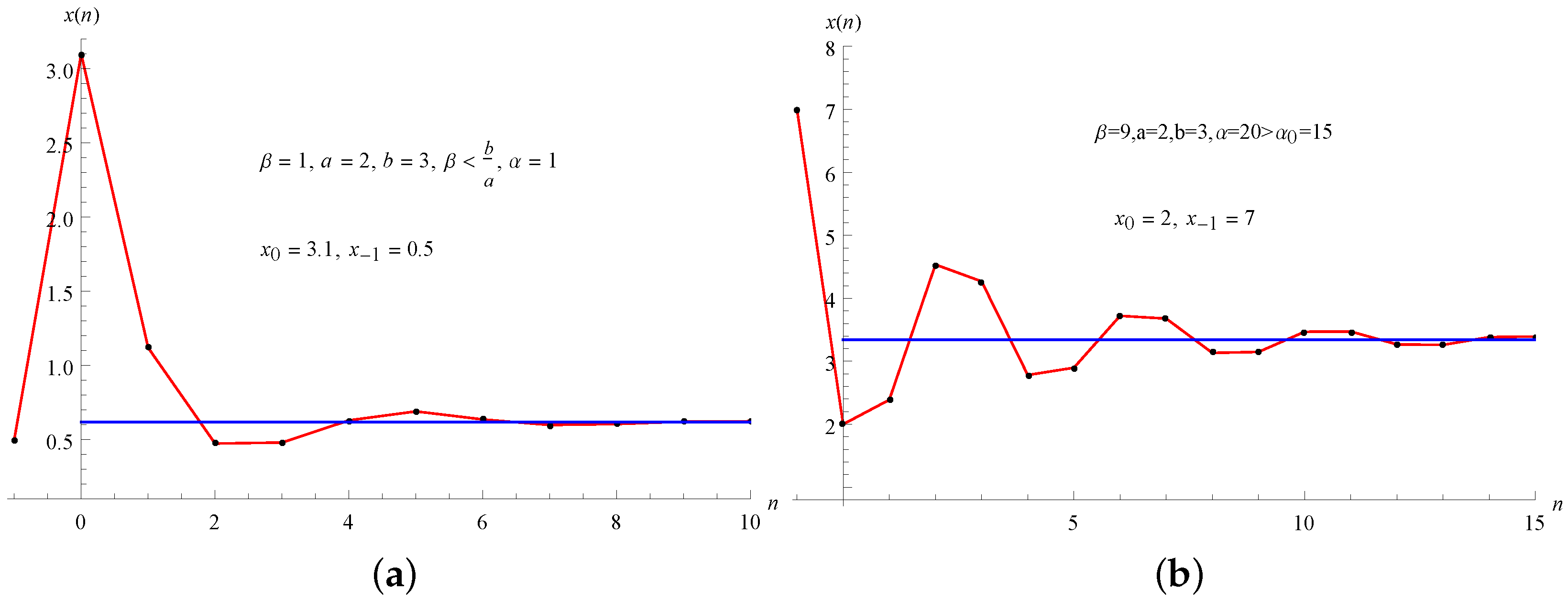
Theorem 7. Assume that one of the following conditions hold:
- (1)
- (2)
Then, the unique Equilibrium (8) of Equation (1) is globally asymptotically stable. Proof. In this case (see the proof of Lemma 1) the invariant interval (and an attracting interval) of Equation (
1) is
Since , then f is increasing in the first variable and decreasing in the second variable and we can apply Theorem 1. Also, we know that the equilibrium is locally asymptotically stable, and consequently the proof will be completed by using Lemma 3 and Theorem 1. □
For some numerical values of parameters we give visual evidence for Theorem 7. (See
Figure 1a).
, Lemma 1 implies that
Since
we have to consider the following three cases:
- (i)
- (ii)
- (iii)
For the case of
we have the following result about global behavior of solutions of Equation (
1).
Theorem 8. Assume that one of the following conditions hold:
- (1)
- (2)
where Then, the unique Equilibrium (8) of Equation (1) is globally asymptotically stable. Proof. Since , we have that , i.e., from which
In this case we have
which implies that the interval
is an invariant interval. Indeed, since the function
is continuous, then
attains its extreme points at the end of closed interval or at the stationary point. Straightforward calculations show that all values
are in
We know that
On the other hand, we have that
which implies
.
Also, we know that
, which implies that
f is increasing in the first variable and decreasing in the second variable. Since Equation (
1) has the unique equilibrium point in invariant interval
, we can apply Theorem 1. Also, we know that the equilibrium
is locally asymptotically stable, and consequently the proof will be completed by using Lemma 3 and Theorem 1. □
For some numerical values of parameters we give visual evidence for Theorem 8. (See
Figure 1b).
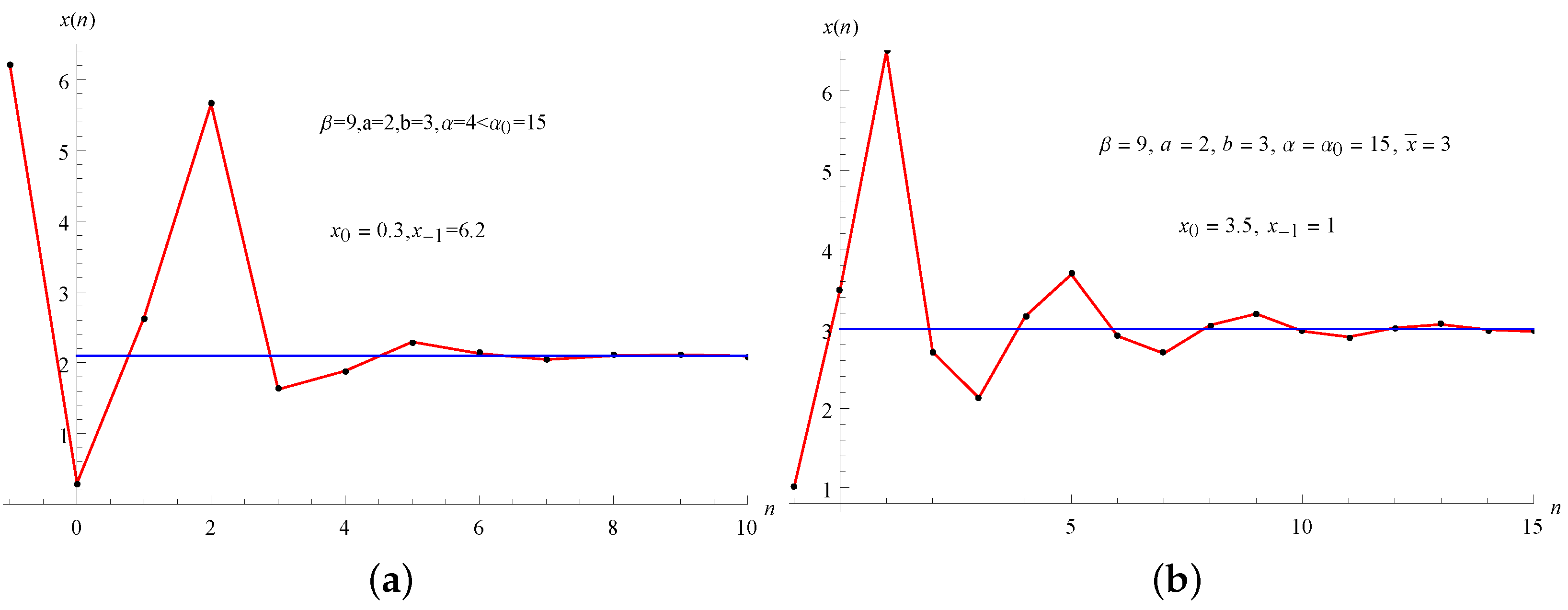
For the case of the following result holds.
Theorem 9. Assume that Then, the invariant interval of Equation (1) isthat isand the unique Equilibrium (8) of Equation (1) is globally asymptotically stable. Proof. Since , then , that is , from which .
First, we prove that the invariant interval is given by
. Since the function
is continuous, then this function attains its extreme points at the end of closed interval or at the stationary point. Straightforward calculations show that
are in
.
Now, we prove that the equilibrium point is in interval
. Set
We know that
On the other hand, we have
which shows that
.
Since the function
is decreasing in both variables, and Equation (
1) has the unique equilibrium point in invariant interval
, we can apply Theorem 2. System of algebraic equations
becomes
It is easy to see that this system has a unique solution , which completes the proof. □
For some numerical values of parameters we give visual evidence for Theorem 9. (See
Figure 2a).
Remark 1. Notice that we can prove Theorem 9 by using Theorem 3. In this case, we havewhich means that every solution of Equation (1) is bounded from above and from below by positive constants. Sinceand f clearly satisfies the conditions 1. and 2. of Theorem 3. Now, by using Theorem 3, we have that every solution of Equation (1) converges to . Now, consider the case .
Lemma 4. Assume that , that is , where . Then, Equation (1) does not posses a minimal period-four solution. Proof. Suppose the opposite, i.e., Equaiton (
1) has a minimal period-four solution:
, that is the following equalities hold
By eliminating
z and
t we obtain
where
Since
, we have that
and
. Therefore, system (
18) has a unique solution of the form
which means that Equaiton (
1) has no a minimal period-four solution. □
Theorem 10. Assume that , that is , where . Then, the unique Equilibrium (8) of Equaiton (1) is globally asymptotically stable. Furthermore, every solution oscillates about the equilibrium point with semicycles of length two. Proof. Notice that
which implies that the length of the semicycle is two. By using Eq.(
1), we have
After straightforward calculations, we obtain
On the other hand,
if and only if
which is true.
Therefore, for
, we have that
and we see that
and
are always on the same side of the equilibrium point
. Namely, if
, then
and so, if
, then
Therefore, every sequence
,
,
,
is monotone and bounded. This implies that each of the sequences is convergent. Since, by Lemma 4, Equation (1) has no minimal period-four solutions, we have that
which implies that the equilibrium
is an attractor. It means that
is globally asymptotically stable. □
For some numerical values of parameters we give visual evidence for Theorem 10. (See
Figure 2b)
Remark 2. Notice that in the case when these four subsequences exist, there is an invariant interval of this form , but we can not use any of Theorems 1 and 2 because the map associated with Equation (1) changes its monotonicity with respect to the first variable in this invariant interval. Remark 3. Based on our numerical simulations and Theorems 4 and 5, we believe that every solution of Equaiton (1) oscillates about the equilibrium with semicycles of length two. (See Figure 1 and Figure 2). Also, based on our numerical simulations, we give the following conjecture.
Conjecture 1. The unique positive Equilibrium (8) of Equation (1) is always globally asymptotically stable.



{kind=link}
{kind=link}

