An Implicit Hybrid Method for Solving Fractional Bagley-Torvik Boundary Value Problem


Abstract
:1. Introduction
2. Preliminaries
- for constant
- .
- The order is greater than or equal 1,
- ,
3. Method of Solution
- The roots of for which are simple.
- Sum of coefficients of is zero.
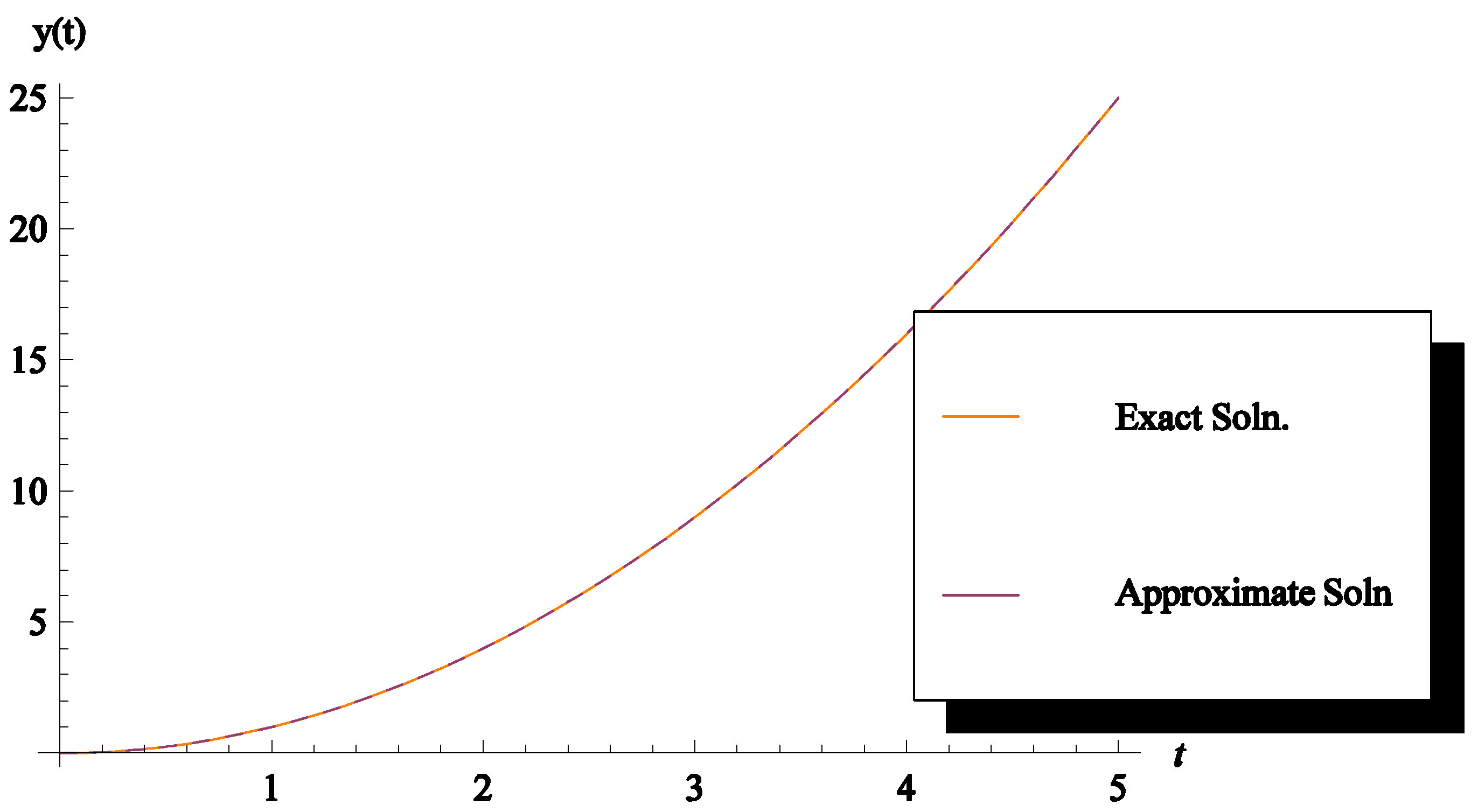
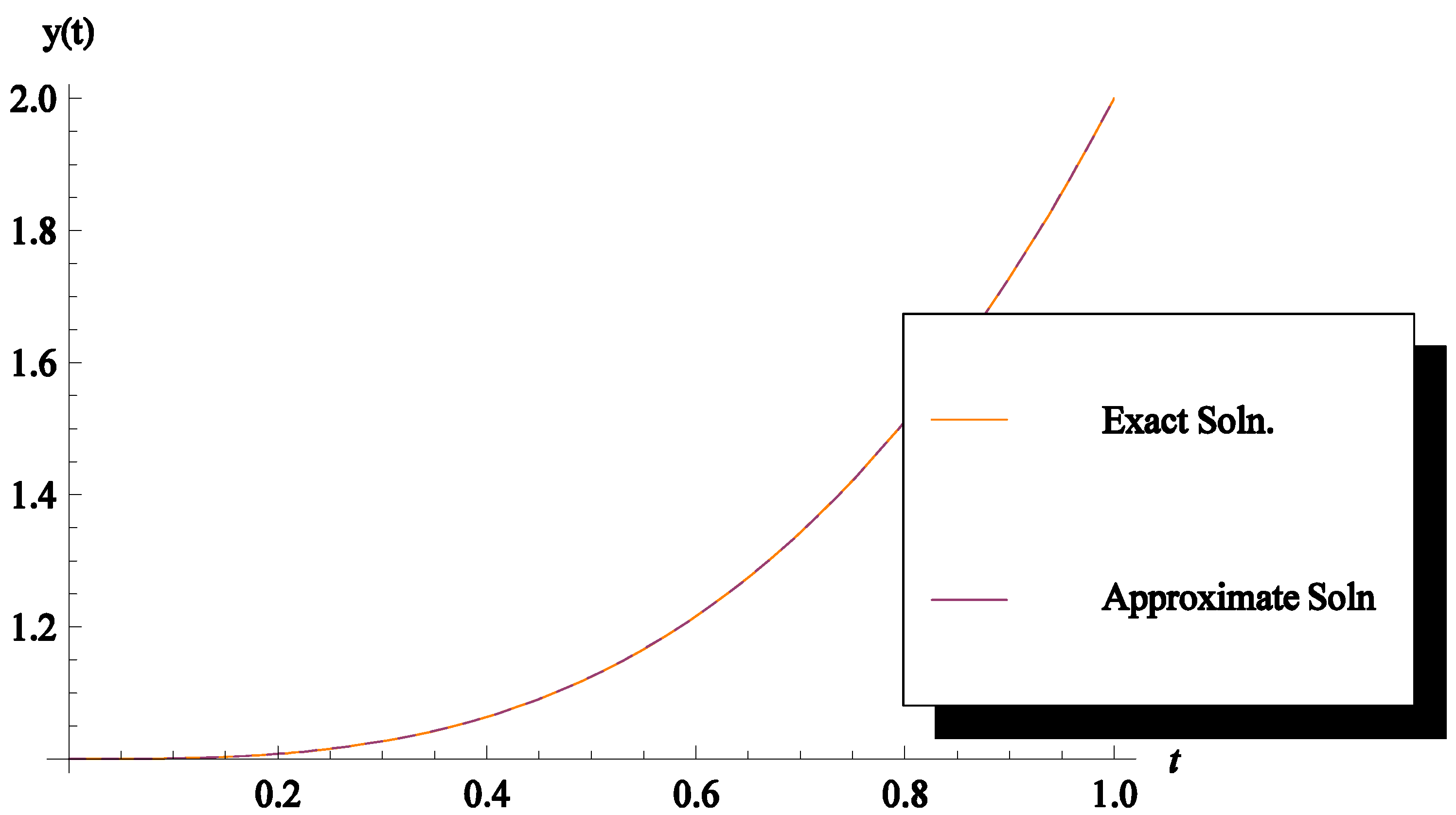
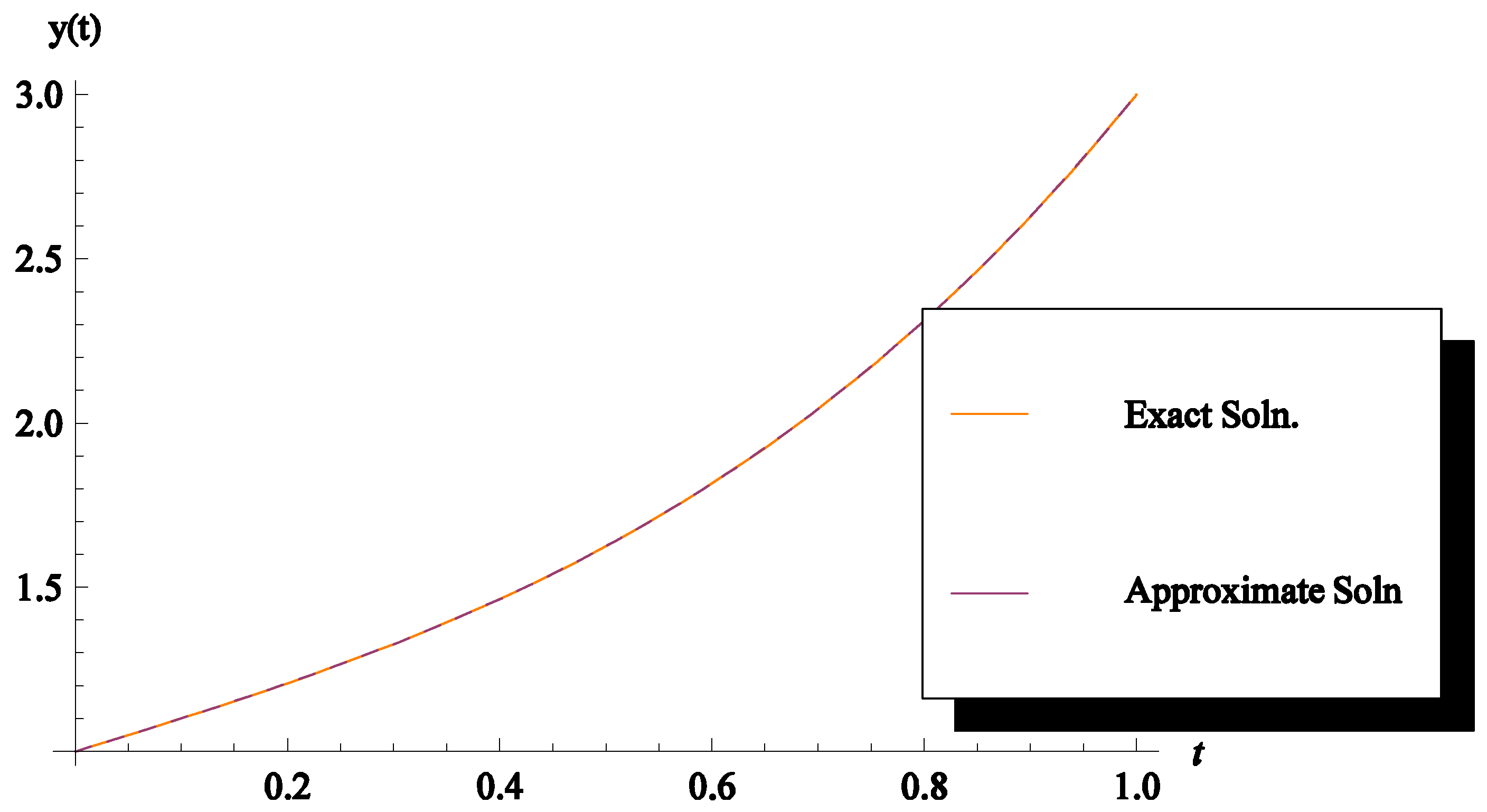
4. Numerical Results
5. Conclusions
- The modified implicit hybrid method is consistent, zero stable, and the order of convergence is 4.
- The interval of convergence is (−9.6, 0) and the region of absolute stability is given in Figure 1.
- The order of convergence is high without the need to refer to more initial conditions.
- The modified fractional implicit hybrid method can be applied to more physical and engineering applications.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Caponetto, R.; Dongola, G.; Fortuna, L.; Gallo, A. New results on the synthesis of FO-PID controllers. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 997–1007. [Google Scholar] [CrossRef]
- Di Matteo, A.; Pirrotta, A. Generalized Differential Transform Method for Nonlinear Boundary Value Problem of Fractional Order. Commun. Nonlinear Sci. Numer. Simul. 2015, 29, 88–101. [Google Scholar] [CrossRef]
- Sabatier, J.; Agrawal, O.P.; Tenreiro Machado, J.A. Advances in Fractional Calculus. Theoretical Developments and Applications in Physics and Engineering; Springer: Dordrecht, The Netherlands, 2007. [Google Scholar]
- Hilfer, R. Applications of Fractional Calculus to Physics; World Scientific: Singapore, 2000. [Google Scholar]
- Atanackovic, T.M.; Pilipovic, S.; Stankovic, B.; Zorica, D. Fractional Calculus with Applications in Mechanics; Wiley: London, UK, 2014. [Google Scholar]
- Di Matteo, A.; Di Paola, M.; Pirrotta, A. Innovative modeling of tuned liquid column damper controlled structures. Smart Struct. Syst. 2016, 18, 117–138. [Google Scholar] [CrossRef]
- Gemant, A. On fractional differentials. Philos. Mag. Ser. 1938, 25, 540–549. [Google Scholar] [CrossRef]
- Bosworth, R.C.L. A definition of plasticity. Nature 1946, 157, 447. [Google Scholar] [CrossRef] [PubMed]
- Nutting, P.G. A new general law deformation. J. Frankl. Inst. 1921, 191, 678–685. [Google Scholar] [CrossRef]
- Obaidat, Z.; Momani, S. A generalized differential transform for linear partial differential equations of fractional order. Appl. Math. Lett. 2008, 21, 194–199. [Google Scholar]
- Ghorbani, A.; Alavi, A. Applications of He’s variational iteration method to solve semidifferential equations of nth order. Math. Prob. Eng. 2008, 2008, 627983. [Google Scholar] [CrossRef]
- Blank, L. Numerical Treatment of Differential Equations of Fractional Order. 1996. CiteSeerX—Numerical Treatment of Differential Equations of Fractional Order. Available online: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.23.1 (accessed on 1/12/2017).
- Rawashdeh, E.A. Numerical solution of semidifferential equation by collocation method. Appl. Math. Comput. 2006, 174, 869–876. [Google Scholar] [CrossRef]
- Syam, M.I. Analytical solution of the Fractional Fredholm integro-differntial equation using the modified residual power series method. Complexity 2017, 2017, 4573589. [Google Scholar] [CrossRef]
- Kashkari, B.; Syam, M. Evolutionary computational intelligence in solving a class of nonlinear Volterra–Fredholm integro-differential equations. J. Comput. Appl. Math. 2017, 311, 314–323. [Google Scholar] [CrossRef]
- Syam, M.; Jaradat, H.M.; Alquran, M. A study on the two-mode coupled modified Korteweg—De Vries using the simplified bilinear and the trigonometric-function methods. Nonlinear Dyn. 2017, 90, 1363–1371. [Google Scholar] [CrossRef]
- Syam, M.I. A computational method for solving a class of non-linear singularly perturbed Volterra Integro-differential boundary-value problems. J. Math. Comput. Sci. 2013, 3, 73–86. [Google Scholar]
- Baleanu, D.; Diethelm, K.; Scalas, E.; Trujillo, J.J. Fractional Calculus Models and Numerical Models (Series on Complexity, Nonlinearity and Chaos); Word Scientific: Singapore, 2012. [Google Scholar]
- Al-Mdallal, Q.; Syam, M.; Anwar, M. A collocation-shooting method for solving fractional boundary value problems. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 3814–3822. [Google Scholar] [CrossRef]
- Syam, M.I.; Siyyam, H.I. Numerical differentiation of implicitly defined curves. J. Comput. Appl. Math. 1999, 108, 131–144. [Google Scholar] [CrossRef]
- Syam, M.I. The modified Broyden-variational method for solving nonlinear elliptic differential equations. Chaos Solitions Fractals 2007, 32, 392–404. [Google Scholar] [CrossRef]
- El-Sayed, M.F.; Syam, M.I. Numerical study for the electrified instability of viscoelastic cylindrical dielectric fluid film surrounded by a conducting gas. Physica A 2007, 377, 381–400. [Google Scholar] [CrossRef]
- Syam, M. Cubic spline interpolation predictors over implicitly defined curves. J. Comput. Appl. Math. 2003, 157, 283–295. [Google Scholar] [CrossRef]
- El-Sayed, M.F.; Syam, M.I. Electrohydrodynamic instability of a dielectric compressible liquid sheet streaming into an ambient stationary compressible gas. Arch. Appl. Mech. 2007, 77, 613–626. [Google Scholar] [CrossRef]
- Syam, M.I.; Siyyam, H.I. An efficient technique for finding the eigenvalues of fourth-order Sturm-Liouville problems. Chaos Solitons Fractals 2009, 39, 659–665. [Google Scholar] [CrossRef]
- Syam, M.I.; Attili, B.S. Numerical solution of singularly perturbed fifth order two point boundary value problem. Appl. Math. Comput. 2005, 170, 1085–1094. [Google Scholar] [CrossRef]
- Beyer, H.; Kempfle, S. Definition of physically consistent damping laws with fractional derivatives. Z. Angew. Math. Mech. 1995, 75, 623–635. [Google Scholar] [CrossRef]
- Zahra, W.K.; Van Daele, M. Discrete spline methods for solving two point fractional Bagley–Torvik equation. Appl. Math. Comput. 2017, 296, 42–56. [Google Scholar] [CrossRef]
- Karaaslan, M.F.; Celiker, F.; Kurulay, M. Approximate solution of the Bagley–Torvik equation by hybridizable discontinuous Galerkin methods. Appl. Math. Comput. 2016, 285, 51–58. [Google Scholar] [CrossRef] [Green Version]
- Çenesiz, Y.; Keskin, Y.; Kurnaz, A. The solution of the Bagley–Torvik equation with the generalized Taylor collocation method. J. Frankl. Inst. 2010, 347, 452–466. [Google Scholar] [CrossRef]
- Saha Ray, S. On Haar wavelet operational matrix of general order and its application for the numerical solution of fractional Bagley Torvik equation. Appl. Math. Comput. 2012, 218, 5239–5248. [Google Scholar] [CrossRef]
- Yang, X.J.; Machado, J.T.; Cattani, C.; Gao, F. On a fractal LC-electric circuit modelled by local fractional calculus. Commun. Nonlinear Sci. Numer. Simul. 2017, 47, 200–206. [Google Scholar] [CrossRef]
- Yang, X.J. Local fractional integral transforms. Prog. Nonlinear Sci. 2011, 4, 1–225. [Google Scholar]
- Lambert, J.D. Numerical Methods for Ordinary Differential Systems; John Wiley: New York, NY, USA, 1991. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| α | in [19] | Using Our Method |
|---|---|---|
| 0 | ||
| 0.001 | ||
| 0.01 | ||
| 0.1 | ||
| 0.5 | ||
| 1 |
| 0 | |
| 0.1 | |
| 0.2 | |
| 0.3 | |
| 0.4 | |
| 0.5 | |
| 0.6 | |
| 0.7 | |
| 0.8 | |
| 0.9 | |
| 1.0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Syam, M.I.; Alsuwaidi, A.; Alneyadi, A.; Al Refai, S.; Al Khaldi, S. An Implicit Hybrid Method for Solving Fractional Bagley-Torvik Boundary Value Problem. Mathematics 2018, 6, 109. https://doi.org/10.3390/math6070109
Syam MI, Alsuwaidi A, Alneyadi A, Al Refai S, Al Khaldi S. An Implicit Hybrid Method for Solving Fractional Bagley-Torvik Boundary Value Problem. Mathematics. 2018; 6(7):109. https://doi.org/10.3390/math6070109
Chicago/Turabian StyleSyam, Muhammed I., Azza Alsuwaidi, Asia Alneyadi, Safa Al Refai, and Sondos Al Khaldi. 2018. "An Implicit Hybrid Method for Solving Fractional Bagley-Torvik Boundary Value Problem" Mathematics 6, no. 7: 109. https://doi.org/10.3390/math6070109
APA StyleSyam, M. I., Alsuwaidi, A., Alneyadi, A., Al Refai, S., & Al Khaldi, S. (2018). An Implicit Hybrid Method for Solving Fractional Bagley-Torvik Boundary Value Problem. Mathematics, 6(7), 109. https://doi.org/10.3390/math6070109