We start with the following essential lemmas.
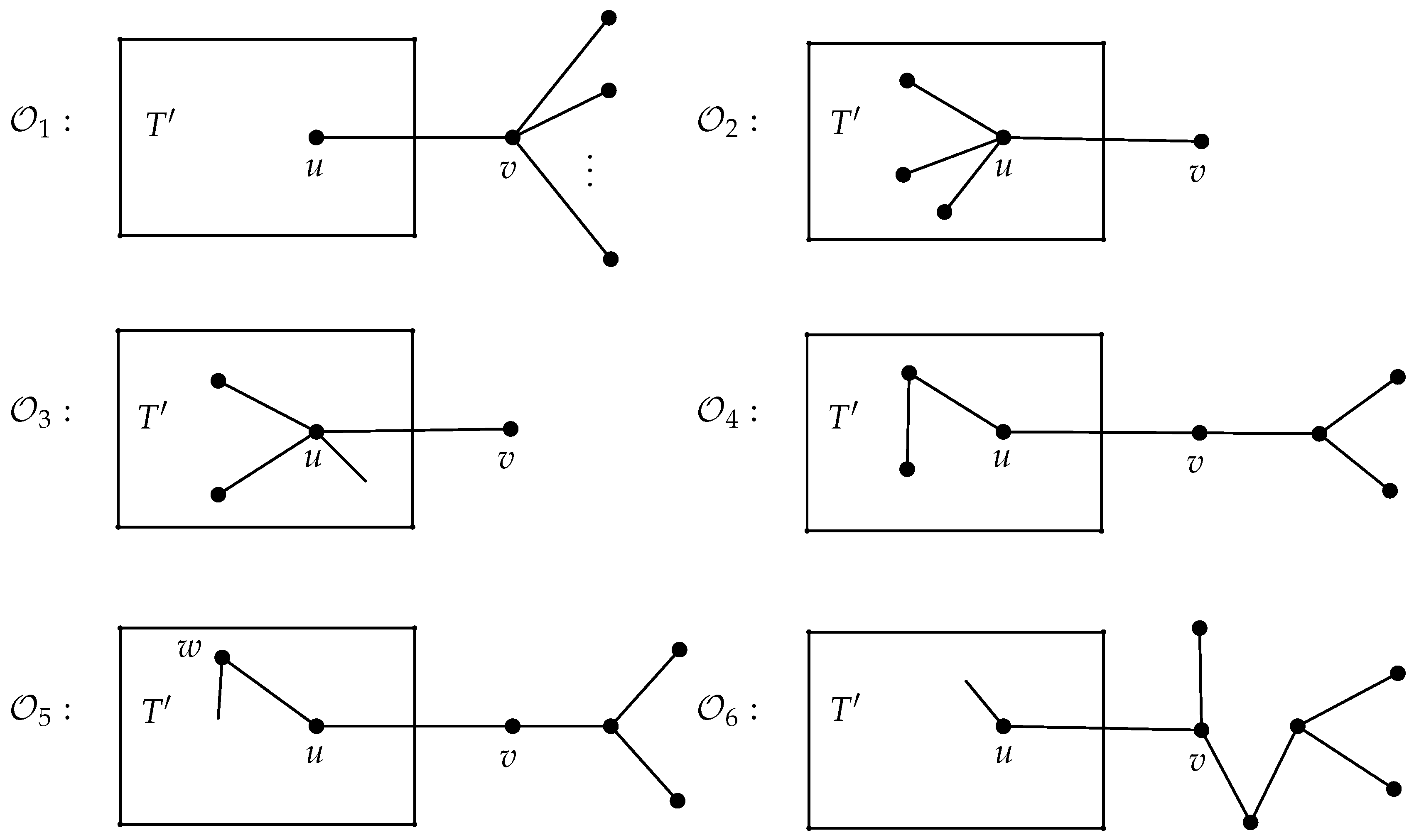
Proof. We proceed by induction on the order of a tree . If , then and clearly . Suppose that and that for every tree in of order , where , we have . Assume that has order n. Thus, T can be obtained from a sequence of trees , where and where and . For each , the tree can be constructed by via one of the operations .
Set . We know that has less than n vertices. Applying the inductive hypothesis to , we know that . Suppose that f is a -function of T, where the sum of the values assigned to all leaves under f is the minimum. We restrict the function f to the tree and denote it by . For any vertex , the equality holds. Six different situations are considered in the sequel.
Case 1.T is derived by through Operation .
Assume
T is obtained from
by adding a star
, with central vertex
v and leaves
, and adding the edge
such that
. Then
u can not get the value 0 under any
-function. Hence every PRDF on
can be extended to a PRDF on
T by assigning the weight 2 to
v and the weight 0 to the three neighbors of
v. Hence, by the statement above, and inductive hypothesis, we obtain
Conversely, the vertex
v is a strong support vertex of
T and so we can see that
and
. If
, then
is a WRDF on
and so
Now assume that
, then
is a WRDF on tree
and so
Therefore, we must have equalities throughout the inequality chain (
1). In particular,
.
Now, assume that . Then there is a -function g such that g is not a PRDF. Since v is a strong support vertex, hence . If , then the function is a -function that is not a PRDF. This is a contradiction. Hence, . Thus, the function is a WRDF on tree and so . This is a contradiction. Therefore, .
Case 2.T is derived by through Operation .
Assume that
is a
-function. We have
and therefore
is extended to a PRDF on
T by giving the weight 0 to
v. Hence, by inductive hypothesis, we obtain
Conversely, the vertex
u is a strong support vertex of
T and so we can see that
and
. Hence,
is a WRDF on
and so
. Therefore, we must have equalities throughout the inequality chain (
4). In particular,
. Assume that
. Thus, there is a
-function
g such that
g is not a PRDF. Since
u is a strong support vertex, then
and
. Hence, the function
is a
-function that is not a PRDF. This is a contradiction. Therefore,
.
Case 3.T is derived by through Operation .
Assume that
is a
-function and
. Hence, we assume that
and
. Then
can be extended to a PRDF on
T by assigning the weight 0 to
v. Hence, by the inductive hypothesis, we obtain
Conversely, the vertex
u is a strong support vertex of
T and so we obtain that
and
. Hence,
is a WRDF on
and so
Therefore, we must have equalities throughout the inequality chain (
5). In particular,
. Assume that
. Thus, there is a
-function
g such that
g is not a PRDF. Since
u is a strong support vertex, then
and
. Hence, the function
is a
-function that is not a PRDF. This is a contradiction. Therefore,
.
Case 4.T is derived by through Operation .
Assume
T is obtained from
by adding a star
, with central vertex
x and leaves
, and adding the edge
where
u is a leaf that is adjacent to a strong support vertex
w of
. Assume that
is a
-function. Note that
w is a strong support vertex, we assume that
and
. By the inductive hypothesis,
is a
-function. Then, we extend
to a PRDF on
T by giving the weight 2 to
x and the weight 0 to the vertices
and
z. Hence, by the statement above, and the inductive hypothesis, we obtain
Conversely, the vertex
x is a strong support vertex of
T. Also,
and
hold. Hence,
is a WRDF on
and therefore
Therefore, we must have equalities throughout the inequality chain (
6). In particular,
.
Assume that . Then there is a -function g such that g is not a PRDF. Since x is a strong support vertex, we may assume that and . Then the function is a -function on tree that is not a PRDF. This is a contradiction. Therefore, .
Case 5.T is derived by through Operation .
If
T is constructed from
via adding a star
with central vertex
x and leaves
, and joining leaf
v of the star to vertex
u of
such that every
-function of
gives to the vertex
u the value 0. Assume that
is a
-function. By the hypothesis,
. On the other hand,
is a
-function since
. Thus,
can be extended to a PRDF on
T by assigning the weight 2 to
x and the weight 0 to
and
z. Hence, by the statement above, and inductive hypothesis, we obtain
Conversely, the vertex
x is a strong support vertex of
T and so we can see that
and
. Hence,
is a WRDF on
and therefore
Accordingly, we know these equalities across the inequality chain (
8). Accordingly,
.
Assume that . Then there is a -function g such that g is not a PRDF. Since x is a strong support vertex, we may assume that and . Then, the function is a -function on tree and so . Since g is not a PRDF, we deduce that is not a PRDF, which leads to a contradiction. Therefore, .
Case 6.T is derived by through Operation .
Suppose that T is derived from via adding a tree F and joining its support vertex v with degree two to a vertex u of such that and every -function of assigns to the vertex u the value 2. Let , , and .
Suppose that
is a
-function. Then
. Hence, we extend
to a PRDF on
T by assigning the weight 0 to
, the weight 1 to
w and the weight 2 to
r. Hence, by the statement above, and the inductive hypothesis, we obtain
Conversely, the vertex
r is a strong support vertex of
T and so we can assume that
and
. Without loss of generality, we may assume that
or
. If
, then
and also
is a WRDF on
and therefore
Next, suppose that
, then
and we may assume that
. Then the function
such that
and for
, we have
, is a WRDF on
and so
Accordingly, we must have equalities throughout the inequality chain (
10). In particular,
.
Now, suppose that . Then there is a -function g such that g is not a PRDF. Since r is a strong support vertex, we may assume that and . If , then we can assume that . Then is -function that is not a PRDF, which leads to a contradiction. Hence, we assume that . We may assume that and . If , then is -function with weight . This is a contradiction. Hence, we assume that . Thus, function by and for is a -function such that , which is a contradiction. Therefore, . This completes the proof. □
Next we have our main results as follows.
Proof. Suppose T is a tree of order n. Moreover, we have . When , holds. Without loss of generality, we suppose T is a tree or order . The induction method will be used in terms of n in the following. We can safely assume that because a path has a -function which is not a PRDF. In the case of , . Furthermore, . What remains to be shown is the case of . Assume that every tree of order having lies in . Suppose that T has n vertices and . Let f be a -function. It is also safe to view T as a tree with a diameter of at least three because any star having at least four vertices is a member of . In the case of , T becomes a double star . We can safely suppose that . If , then and clearly , which is a contradiction. Hence, we assume that . If , then T has a -function that is not a PRDF, which is a contradiction. Hence, we assume that . Then because it is obtained from a star by using Operation . Therefore, we assume that and T has a strong support vertex u with .
Let , and f be a -function. Then and is a PRDF for tree and so . Now, assume that is a -function, then can be extended to a WRDF on T by assigning the weight 0 to the vertex v, and then . Accordingly, . On the other hand, and so . Therefore, . If and are not strongly equal, every -function that is not a PRDF can be extended to a -function by giving 0 to v, that is not a PRDF. This is a contradiction with . Therefore, and by induction on , we have . We conclude that as it is obtained from by using Operation . Hence, we assume that the following fact holds.
Fact 1. If u is a strong support vertex of a tree T, then .
We root T at a leaf of a diametral path from to a leaf farthest from . Then Lemma 1 and Fact 1, implies that . Among all -functions, let f be chosen so that the weight assigned to is as large as possible. Since , it then follows that f is a -function. We consider the following two cases:
Case 1..
Let . Clearly and is a PRDF on . Hence, . Assume that g is a -function. Then we can extend g to a WRDF for T by assigning 0 to , and so . Consequently, . Hence and so . Therefore, . If and are not strongly equal, then every -function which is not a PRDF can be extended to a -function, by assigning 0 to , that is not a PRDF. This leads to a contradiction with . Therefore and by induction on , must be true. Therefore, must hold as it is derived from by applying Operation .
Case 2..
Then Lemma 2 implies that . If , then re-assigning to the vertices and the weight 1 produces a new -function which is not a PRDF. This is a contradiction. Hence, . If is a child strong support vertex of , then we can assume that and so f is not a PRDF, which is a contradiction. On the other hand, Lemma 1 implies that has not a weak support vertex as child. Thus every child of is a leaf. Since holds, is not a strong support vertex. Assume that is a weak support vertex. Let and . Without loss of generality, we may assume that . Then re-assigning to the vertices and z the weight 1 and to the vertex the weight 0, we obtain a new -function which is not a PRDF. This is a contradiction. Hence, we assume that . Thus, Lemma 2 implies that and . Since f is also a -function, then . Assume that . Since f is a -function, every vertex with weight 0 is adjacent to a vertex with weight 2, and then by giving to the vertex the weight 0 and to the vertex the weight 1, we obtain a new -function, contradicting Lemma 2. Hence, and so . Two subcases follow as follows:
Subcase 2.1.
First, we assume that is a support vertex. Since , it is not a strong support vertex so is a weak support vertex. Let . Without loss of generality, we can assume that since . If has a child u that is a strong support vertex, then we can assume that , contradicting that f is a -function of T. Thus, does not have a strong support vertex as a child. On the other hand, Lemma 1 implies that does not have a weak support vertex as a child. Hence, every child of , except , plays a role similar as . Assume that and u is a child of other than and . Let . Since f is a -function and , hence is a PRDF on , and so . Assume that is a -function. Let and . Then, we can assume that and . If , then we can extend to a WRDF on T by assigning the weight 2 to and the weight 0 to the three neighbors of it. Hence, . Next, assume that . Since , for every such that , there exists at least one vertex such that . Hence, we can extend to a WRDF on T by assigning the weight 2 to and the weight 0 to the three neighbors of it. Hence, . Consequently, in both cases, . Therefore, and so . If and are not strongly equal, then every -function which is not a PRDF is extended to a -function by giving the weight 2 to and the weight 0 to the three neighbors of it, that is not a PRDF. This leads to a contradiction with . Therefore, and by induction on , we have . We conclude that , as it is obtained from by using Operation .
Thus, we can assume that . If , then clearly and so by re-assigning to the vertices and the value 1 and to the vertex the value 0 we get a new -function which is not a PRDF. This is a contradiction. Hence, we can assume that . Let . Since f is a -function and , then is a PRDF on and so . Assume that is a -function. If , then we can extend to a WRDF on T by assigning the weight 2 to , the weight 1 to and the weight 0 to the remaining vertices of T, which is a WRDF of T of weight , and so . Next, assume that . If for every vertex with , there exists at least one vertex with , then we can extend to a WRDF on T by assigning the weight 2 to , the weight 1 to and the weight 0 to the remaining vertices of T, which is a WRDF of T of weight , and so . We assume that there exists a vertex with such that for every , we have . Then for every vertex , we get , since is a -function. Hence, there exists a vertex such that , since . Then by re-assigning to the vertices and y the value 1, we get a new -function . Consequently, . Hence, and so .
Now assume that is a -function. We first assume that . Then we can extend to a -function by assigning the weight 2 to , the weight 1 to and the weight 0 to the remaining vertices of T. This is a contradiction since every -function assigns to the vertex the value 2. Next, assume that . If for every vertex with , there exists at least one vertex with , then we can extend to a -function by assigning the weight 2 to , the weight 1 to and the weight 0 to the remaining vertices of T. This is a contradiction since every -function assigns to the vertex the value 2. Hence, we can assume that every -function assigns to the vertex the value 2.
Also, if and are not strongly equal, then every -function which is not a PRDF, can be extended to a -function by assigning the weight 2 to , the weight 1 to and the weight 0 to the remaining vertices of T, that is not a PRDF on tree T, which leads to a contradiction with . Therefore, and so by induction on , we have . We conclude that since it is obtained from by using Operation .
Now, assume that is not a strong support vertex. Then, we observe that every child of plays a similar role as . Let . Since f is a -function and , then is a PRDF on and so . Assume that is a -function. Let and . Then, clearly we can assume that and . If , then we can extend to a WRDF on T by assigning the weight 2 to and the weight 0 to the three neighbors of it. Hence . Next, assume that . Since , for every such that , there exists at least one vertex such that . Hence, we can extend to a WRDF on T by assigning the weight 2 to and the weight 0 to the three neighbors of it. Hence, . Consequently, in both cases, . Therefore, and so . Assume that is an arbitrary -function. Then we can assume that . Hence, as before, it can be extended to a -function g by assigning the weight 2 to and the weight 0 to the three neighbors of it. Since , we deduce that g is a -function and so is -function. Therefore, and via induction on , holds. Therefore, as it is derived via by applying Operation .
Subcase 2.2.
If , then by re-assigning to the vertex the value 0, to the vertex the value 1 and to the vertex the value , we arrive at a new WRDF g with weight at most such that . This is a contradiction. Thus, we may assume that .
First, we assume that is a support vertex. Let . Since , hence is a PRDF for and so . Now, assume that be a -function. Since in tree is a strong support vertex, we can assume that . Then, we can extend to a WRDF on T by assigning the weight 2 to and the weight 0 to the three neighbors of it. Hence, . Consequently, in both cases, . Therefore, and so . Assume that is an arbitrary -function. Then, we can assume that and . Hence, as before, it can be extended to a -function g by assigning the weight 2 to and the weight 0 to the three neighbors of it. Since , we deduce that g is a -function and so is -function. Therefore, and via induction on , holds true. Similarly, it is easy to see that holds. This can be seen as it is derived by applying Operation .
Next, suppose is not a support vertex. By Lemma 1, the vertex does not have a weak support vertex as a child. Also, by Lemma 2, the vertex does not have a strong support vertex as a child with degree three. We assume that has as a child, a strong support vertex v with . Let . Then, clearly and is a PRDF for . So . Assume that is a -function. can be extended to a WRDF on T by giving the weight 2 to v and the weight 0 to the all leaves neighbors of it. Hence, . Consequently, in both cases, . Hence, and so . Now, assume that is an arbitrary -function. It can then be extended to a -function g by assigning the weight 2 to v and the weight 0 to the all leaves neighbors of it. Since , we deduce that g is a -function and so is a -function. Therefore, . Using induction on , holds true. Similarly, . This is because and the Operation .
Next, we suppose that for any child support vertex v of , we have . Let . Assume that is a leaf vertex of a tree , other than and y, and at maximum distance from . Let be the shortest path from to . Clearly, . As noted earlier, . We proceed depending on t.
We first suppose that . Then Lemma 1 implies that and so is a strong support vertex. Without loss of generality, we may assume that and so , since f is a -function and . Hence, . If is not a support vertex, then by Lemma 1 any child u of is a strong support vertex and so we can assume that . Then by re-assigning to the vertex the value 0, we get a new WRDF with weight less than . This is a contradiction. Assume that is a weak support vertex. Let . Without loss of generality, we may assume that and . Then by re-assigning to the vertex the value 0 and to the vertex the value 1, we produce a new -function which is not a PRDF. This is a contradiction. Thus, we may assume that is a strong support vertex. If and , then we can assume that and . Then by re-assigning to the vertex the value 0 and to the vertices and the value 1, we get a new -function which is not a PRDF. This is a contradiction. Hence, we may assume that and so . Then, Lemma 2 implies that . Let . Then, clearly and is a PRDF for and so . Assume that is a -function. Then, we can extend to a WRDF on T by assigning the weight 2 to and the weight 0 to the all leaves neighbors of it. Hence, . Consequently, in both cases, . Therefore, and so . Now, assume that is an arbitrary -function. Then it can be extended to a -function g by assigning the weight 2 to and the weight 0 to all leaves neighbors of it. Since , we deduce that g is a -function and so is a -function. Therefore, . Using induction on , must be true. Therefore, we have . This is due to and the Operation .
Suppose that . Since plays the same role as , we may assume that and is a strong support vertex of degree three. Let and . Then is a PRDF for and so . Now, assume that is a -function. If , can be generalized to a WRDF on T by giving the weight 2 to and the weight 0 to all neighbors of it. Hence, . Assume that . Then, we can assume that , and . If , then we can extend to a -function g by re-assigning to the vertex the value 2 and to the value 0 and by assigning the weight 2 to and the weight 0 to all neighbors of it, and so . Assume that . Then we can assume that . We can extend to a -function g by re-assigning to the vertex the value 2 and to the vertices and the value 0 and by assigning the weight 2 to and the weight 0 to all neighbors of it, and so . Consequently, in all cases, . Hence, and so . Now, assume that be an arbitrary -function. Then, as before, it can be extended to a -function g by re-assigning to the vertex the value 2 and to the vertices and the value 0 and by assigning the weight 2 to and the weight 0 to all neighbors of it. Since , we deduce that g is a -function and so is a -function. Therefore, . Via induction on , holds true. Consequently, it can be seen that . This is again due to as well as the Operation . The proof is then completed as desired. □



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




