1. Introduction
1.1. Fractional Diffusion Equations
A fractional diffusion equation of order
is obtained by rewriting a normal diffusion equation in integral form as
Then, replacing the first of right-hand side (RHS) integral of Equation (
1) by a Riemann-Liouville fractional integral,
of order
we get
Now, differentiating the above equation on both sides with respect to
t, we get the following fractional diffusion equation:
If
, then Equation (
2) is a classical diffusion equation. Equation (
2) with
is called the fractional diffusion equation. These equations appear in the model of anomalous diffusion in heterogeneous media. Anomalous diffusion is one of the most ubiquitous phenomena in nature; it has been observed in various fields of physical sciences, for example, surface growth, transport of fluid in porous media, two-dimensional rotating flow and diffusion of plasma. Because of such anomalies, the classical diffusion models can not be used to study the dynamics of such systems. In this situation, fractional derivatives extend the help and play a crucial role in characterizing such diffusion. The model corresponding to such derivative is called a fractional partial differential equation. From the continuous time random walk (CTRW) model, Metzler and Klafter [
1] derived Equation (
3) with
as a macroscopic model.
1.2. Impulsive Partial Differential Equations
Impulsive partial differential equations are a very important class of differential equations. These equations arise from the modelling of various real world processes having memory and are subject to short time fluctuations. The theory of impulsive differential equation is very rich and wide. It is mainly due to the fact that the it inherit intrinsic difficulties of the problems. These kinds of equations have lots of applications in different branches of Science and Engineering. These kinds of equations arise naturally from several physical and natural processes like earthquakes and pulse vaccination strategy. For more information, we refer to [
2,
3,
4] and references therein. For more theoretical work, one can see the interesting book by Bainov and Simeonov [
5]. The authors Shun et al. in [
6] consider second-order impulsive Hamiltonian systems and established the existence of infinitely many solutions.
1.3. Controllability
In mathematical control theory, controllability and optimal control are two important concepts. In controllability, one studies the steering of a dynamical system from a given initial state to any other state or in the neighborhood of the state under some admissible control input. The cases where target states are defined in a given subregion are particularly very important; this situation arises in many real world applications. The last few decades have seen tremendous work in the controllability problems for integer order systems. Several techniques have been developed for solving such problems [
7,
8]. It has been seen that mostly authors worked on the problems with hard constraints on the state or control. This is mainly due to its applicability and importance in various applications in optimal control. Moreover, many authors have studied controllability of the semilinear, partial evolution equations, we refer to [
9,
10,
11,
12,
13,
14,
15,
16,
17] and references therein. In a very interesting paper [
14], Kenichi Fujishiro and Masahiro Yamamoto consider a partial differential equations with fractional order time derivatives and established approximate controllability by interior control.
1.4. The Problem under Consideration
Let
be a bounded domain of
with
boundary
. We consider the following initial value/boundary value problem of an impulsive sub-diffusion equation of order
:
In Equation (
3),
is the state to be controlled and
is the control which is localized in a subdomain
of
. We will act by
f to drive the initial state
to some target function
. The operator
A is a symmetric and uniformly elliptic operator. The details will be specified later;
is also a constant. Several problems in applications can be modeled by the above equation. Some of them are: thermal diffusion in media with fractional geometry, underground environmental problems, highly heterogeneous aquifer, etc. [
18]. In this paper, we study approximate controllability for fractional partial differential equations with impulses. We say that Equation (
3) is approximately controllable if, for any
and
, there exists a control
f such that the solution
u of (
3) satisfies
This paper is divided into four sections. In
Section 2, we study requisite function spaces and some important basic results. In
Section 3, we analyse the mild solutions of the Equation (
3) by eigenfunction expansion.
Section 4 is devoted to the study of a dual system of (
3) and to establish a unique continuation property. In the last section, we establish the proof of approximate controllability.
2. Preliminaries
In this section, we state a few function spaces, notations and results in order to establish our main results. For the smooth reading of the manuscript, we first define the following class of spaces (for more details, we refer to Adams [
19], Mahto [
12]):
The functions and operators defined below are very standard in the fractional calculus. For more details, we refer to [
20]:
Mittag-Leffler function by
where
and
are arbitrary constants. We can directly verify that
is an entire function of
. As for the Mittag–Leffler functions, we have the following lemma.
Lemma 1. Let and be arbitrary and μ satisfy . Then, there exists a constant such that Reimann-Liouville integrals: For
and
, we define
-th order forward and backward integrals of
f by
In other words, the forward integral operators of -th order is the convolution with and consequently also belongs to . The same argument is also valid for the backward integrals.
The Riemann-Liouvill fractional derivatives: For
, we define the forward and backward fractional derivatives of
by
We also have the following lemmas for fractional integration by parts.
Lemma 2. Let . If , then Lemma 3. Let . Then, we have the following identity: Proof. By substituing the value of R-L fractional derivative, we obtain
□
3. Solution of Primal System
3.1. Representation of the Solution
To derive the representation, we first focus on
We can rewrite (
3) as
where
and
is a symmetric, self-adjoint, uniformly elliptic operator with domain
, the spectrum of
A is entirely composed of a countable number of eigenvalues and we can set with finite multiplicities:
By
, we denote the orthonormal eigenfunction corresponding to
:
Then, the sequence
is an orthonormal basis in
. Since
we have
where
is the
jth Fourier coefficient. Taking an inner product between (
9) and
we have an infinite number of linear integro-differential equations:
where
and
Taking Laplace Transform both sides of (
10), we get
where
is the Laplace Transform of
Simplifying, we get
By taking the inverse Laplace Transform, we get
Now, the representation for
of (
10) is given by
Thus, a formal solution of (
9) is given by
where
3.2. Weak Formulation
Rewriting the (
3) in unified form, we get
A weak formulation of (
16) is to find a
such that
Thus, we have a variational form of (
16) as follows:
where,
with the following conditions:
is bounded or continuous
is coercive
l is continuous.
Definition 1. A function is called a weak solution of (3) if: - (1)
and
- (2)
For every satisfies (18), - (3)
Based on the above analysis, we can now formulate the following two theorems.
Theorem 1. For every and there exists a unique weak solution of (3). Proof. Existence and uniqueness of weak solution is followed by the Lax-Milgram theorem. □
Theorem 2. For every and there exists a unique mild solution of (3) and given by (15). 4. Dual System
In order to establish approximate controllability, we also need to consider the
dual system for (
3), a similar strategy for partial differential equations of integer order (see Section 8 in [
21] or Chapters 2 and 3 in [
22] for example). The dual system for (
3), which runs backward in time, is given by;
4.1. Solution of Dual System
Proposition 1. Let Then, there exists a unique solution of (19) and the solution is given byand has the following estimate:where Moreover, the mapping is analytically extended to .
Proof. Here, we establish existence and uniqueness of solution of (
19) for
.
Multiplying (
19) with
and setting
we get
From existence and uniqueness of the solution of the fractional differential equation (see [
12]), we get
As
is a complete orthonormal system, we have
Thus, Equation (
19) has a unique solution.
Now, we show the estimate (
21).
Next, we show the analyticity of in .
We note that
is an entire function (see [
20] for example) and consequently each
is analytic in
. Therefore,
in
If we fix
arbitrarily, then, for
with
, we have
That is, (
20) is uniformly convergent in
. Hence,
is also analytic in
. □
4.2. Unique Continuation Property
Proposition 2. Let ω be open in Ω and If a solution be the solution of (19) vanishing in then in . Proof. Since
in
and
can be analytically extended to
, we have
Let
be all spectra of
L without multiplicities and we denote by
an orthonormal basis of
. By using these notations, we can rewrite (
24) by
Then, for any
with
and
, we have
and
where
The right-hand sides of the two inequalities above are integrable on
:
and
Hence, the Lebesgue theorem yields that
where we have used the Laplace transform formula;
(see (1.80) in p. 21 of [
20]). By (
25) and (
26), we have
that is,
By using analytic continuation in
, we have
Then, we can take a suitable disk which includes
and does not include
. By integrating (
27) in the disk, we have
By setting
, we have
Therefore, the unique continuation result for eigenvalue problem of elliptic operator (see [
23,
24]) implies
for each
. Since
is linearly independent in
, we see that
This implies in . □
5. Approximate Controllability
In this section, we complete the proof of our main theorems.
Theorem 3. Let and ω be an open set in Ω. Then, Equation (3) is approximately controllable for arbitrarily given . That is,where u is the solution to (3) and the closure on the left-hand side is taken in . We start the proof with a lemma.
Lemma 4. If the conclusion of Theorem (3) is true for , then it is true for any .
Proof. Let
and
. Let
. Let us introduce
the (mild) solution of
Then,
. Therefore, using the assumption of Lemma 4, there exists
such that the solution
w of
satisfies
One can easily see that , so that the proof of Lemma 4 is achieved. □
We now assume that .
In order to complete the proof of Theorem 3, we will see that the unique continuation property for (
19) is equivalent to the approximate controllability for (
3) stated in Theorem 3.
Proof. Let
u be a solution of (
3) for
and let
v be a solution of (
19) for
Then, we see that
In the above equation, the first term is calculated as follows:
Here, we have used the integration in
t by parts and the initial conditions in (
3) and (
19).
In terms of
and
, we apply the Green formula to the second term, we have
In the above calculation, we have used boundary conditions in (
3) and (
19).
Since
and
and taking
we get
In order to prove density of
in
we have to show that, if
satisfies
for any
then
This can be shown as follows: we have
for any
Then, by the fundamental theorem of the calculus of variations. we have
By proposition (2), we have
By uniqueness of the solution of (1),
which gives
Hence,
is dense in
Thus, the proof of Theorem (3) is completed. □
6. Example
Example 1. Consider the following relaxations’ oscillation equation with fractional order given by Now, consider the corresponding system Let
and assume
to be a continuous function with respect to
t that satisfies the Lipschitz condition in
Define the operator
with domain
It is well known that for generates an analytic semigroup and for generates a cosine family of operators.
Using the above notation, now consider the following system
The above problem can be posed as an abstract problem on and hence it has a unique solution. Hence under the assumption of Theorem, the problem is approximately controllable.
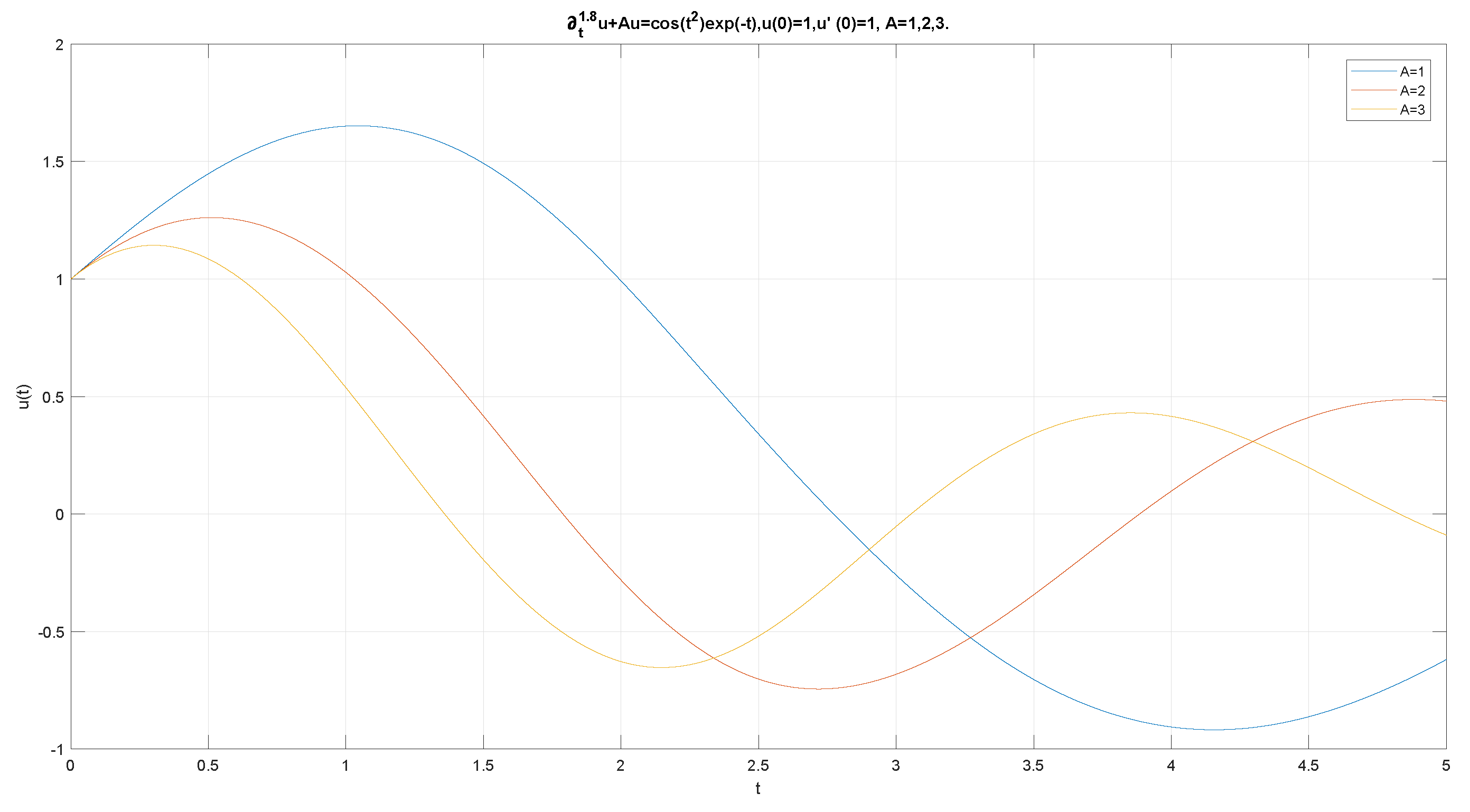
Example 2. By choosing the function we get the following relaxations oscillation equation with fractional order given bywhere A is the operator mentioned above. The graphical illustration of Example 2 is depicted in the
Figure 1.
7. Discussion
This paper presents a fractional sub-diffusion equation of an impulsive system (
3) and its dual (
19). The unique continuation Property 2 of the dual system plays a crucial role in the proof of our main result, approximate controllability Theorem 3 of the primal system with an interior control acts on a sub-domain. As an example, the approximate controllability of a fractional relaxation-oscillation equation is discussed and simulated for different relaxation coefficients.
Author Contributions
Conceptualization, L.M. and S.A.; methodology, S.A. and M.H.; software, M.H.; validation, S.A. and H.M.S.; formal analysis, L.M. and H.M.S.; writing—original draft preparation, S.A. and M.H.; writing—review and editing, S.A. and H.M.S.; supervision, S.A. and H.M.S.
Funding
This research received no external funding.
Acknowledgments
The authors are thankful to the anonymous reviewers for their careful reading of the manuscript and constructive comments and suggestions. Lakshman Mahto would like to thank The Institute of Mathematical Sciences, Chennai, for support and hospitality during the postdoctoral work, where this work was initiated.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Metzler, R.; Klafter, J. The random walk’s guide to anomalous diffusion: A fractional dynamics approach. Phys. Rep. 2000, 339, 1–77. [Google Scholar] [CrossRef]
- Abada, N.; Benchohra, M.; Hammouche, H. Existence and controllability results for nondensely defined impulsive semilinear functional differential inclusions. J. Differ. Equ. 2009, 246, 3834–3863. [Google Scholar] [CrossRef]
- Chu, J.; Nieto, J.J. Impulsive periodic solutions of first-order singular differential equations. Bull. Lond. Math. Soc. 2009, 40, 143–150. [Google Scholar] [CrossRef]
- Fan, Z.; Li, G. Existence results for semilinear differential equations with nonlocal and impulsive conditions. J. Funct. Anal. 2010, 258, 1709–1727. [Google Scholar] [CrossRef]
- Bainov, D.; Simeonov, P. Impulsive Differential Equations: Periodic Solutions and Applications; CRC Press: Boca Raton, FL, USA, 1993; Volume 66. [Google Scholar]
- Sun, J.; Chen, H.; Nieto, J.J. Infinitely many solutions for second-order Hamiltonian system with impulsive effects. Math. Comput. Model. 2011, 54, 544–555. [Google Scholar] [CrossRef]
- Lions, J.L. Optimal Control of Systems Governed Partial Differential Equations; Springer: New York, NY, USA, 1971. [Google Scholar]
- Bergounioux, M.; Penalization, A. Method for Optimal Control of Elliptic Problems with State Constraints. SIAM J. Control Optim. 1992, 30, 305–323. [Google Scholar] [CrossRef]
- Debbouche, A.; Torres, D.F.M. Approximate Controllability of Fractional Nonlocal Delay Semilinear Systems in Hilbert Spaces. Int. J. Control 2013, 86, 1577–1585. [Google Scholar] [CrossRef]
- Debbouche, A.; Torres, D.F.M. Approximate Controllability of Fractional Delay Dynamic Inclusions with Nonlocal Control Conditions. Appl. Math. Comput. 2014, 243, 161–175. [Google Scholar] [CrossRef]
- Khalida, A.; Benchohra, M.; Meghnafi, M. Controllability for impulsive fractional evolution equations with state-dependent delay. Mem. Differ. Equ. Math. Phys. 2018, 73, 1–20. [Google Scholar]
- Mahto, L.; Abbas, S. Approximate controllability and existence of optimal control of impulsive fractional semilinear functional differential equations with non-local condition. J. Abstr. Differ. Equ. Appl. 2013, 4, 44–59. [Google Scholar]
- Mahmudov, N.I. Partial-approximate controllability of nonlocal fractional evolution equations via approximating method. Appl. Math. Comput. 2018, 334, 227–238. [Google Scholar] [CrossRef]
- Fujishiro, K.; Yamamoto, M. Approximate controllability for fractional diffusion equations by interior control. Appl. Anal. 2014, 93, 1793–1810. [Google Scholar] [CrossRef]
- Love, E.R.; Young, M.L.C. On fractional integration by parts. Proc. Lond. Math. Soc. 1937. [Google Scholar] [CrossRef]
- Sakamoto, K.; Yamamoto, M. Initial value/boundary value problems for fractional diffusion-wave equations and applications to some inverse problems. J. Math. Anal. Appl. 2011, 382, 426–447. [Google Scholar] [CrossRef]
- Samko, S.G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives; Gordon and Breach Science Publishers: Philadelphia, PA, USA, 1993. [Google Scholar]
- Nigmatulin, R. The realization of the generalized transfer equation in a medium with fractal geometry. Phys. Status Solidi B 1986, 133, 425–430. [Google Scholar] [CrossRef]
- Adams, R.A. Sobolev Spaces; Academic Press: New York, NY, USA, 1975. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Russell, D.L. Controllability and stabilizability theory for linear partial differential equations: Recent progress and open questions. SIAM Rev. 1978, 20, 639–739. [Google Scholar] [CrossRef]
- Micu, S.; Zuazua, E. An Introduction to the Controllability of Partial Differential Equations, Quelques Questions de Théorie du Contrôle. In Collection Travaux en Cour; Sari, T., Ed.; 2004; pp. 69–157. Available online: https://cel.archives-ouvertes.fr/cel-00392196/document (accessed on 7 January 2019).
- Protter, M.H. Unique Continuation for Elliptic Equations. Trans. Am. Math. Soc. 1960, 95, 81–90. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; North-Holland Mathematical Studies; Elsevier (North-Holland) Science Publishers: Amsterdam, The Netherlands; London, UK; New York, NY, USA, 2006; Volume 204. [Google Scholar]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



{kind=link}
