The Velocity of PCL Fluid in Human Lungs with Beaver and Joseph Boundary Condition by Using Asymptotic Expansion Method

Abstract
:1. Introduction
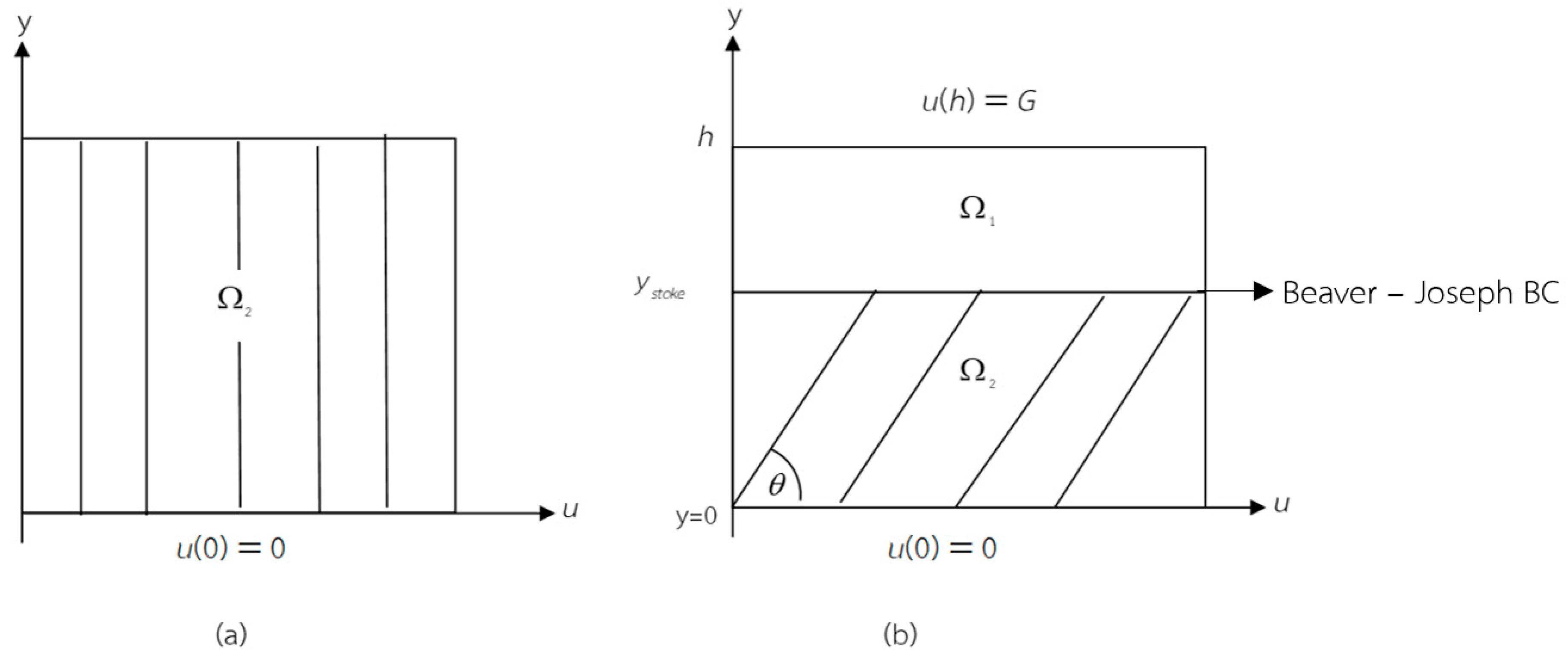
2. Mathematical Model and Boundary Conditions
2.1. Stokes–Brinkman Equations
2.2. Boundary Conditions
3. Dimensionless Stokes–Brinkman Equations
3.1. Dimensionless of Brinkman Equation
3.2. Dimensionless Stokes Equation
3.3. Dimensionless Boundary Conditions
4. Asymptotic Expansion Method of the Stokes–Brinkman Equations
4.1. Asymptotic Expansion Method of the Brinkman Equation
4.2. Asymptotic Expansion Method of Stokes Equation
5. The Relation between the Constants
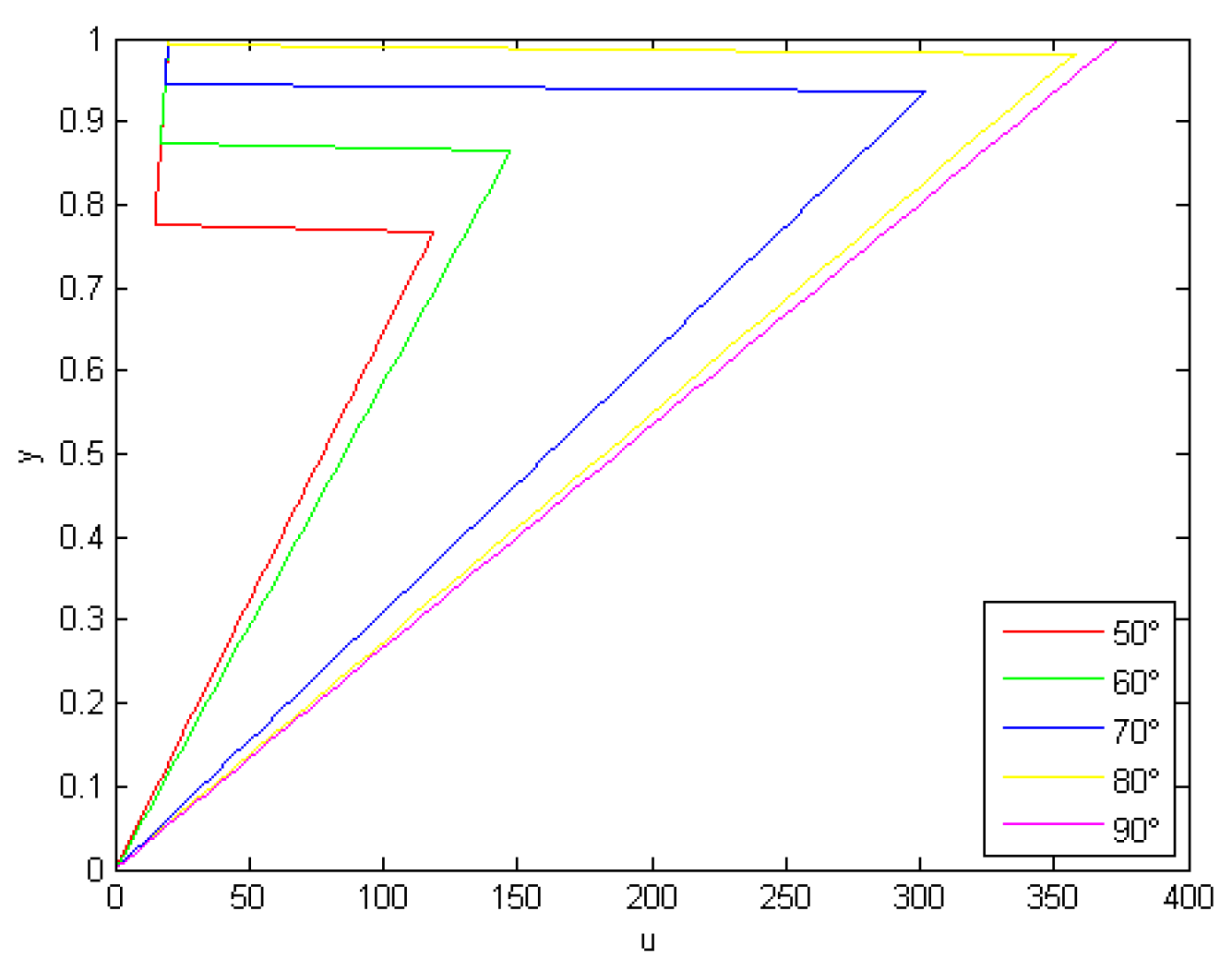
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Variable | Meaning | Unit |
| a dynamic viscosity | ||
| the inverse of the permeability tensor | ||
| a porosity | ||
| the velocities of the liquid | ||
| the velocities of the solid | ||
| pressure | ||
| the material time derivative of the porosity with respect to the solid phase | ||
| the characteristic length | ||
| a volumetric average velocity in a porous medium | ||
| characteristic permeability | ||
| characteristic gravity | ||
| gravity |
Appendix A
%==========================================================================
%================= This Program for Compute the Solutions =================
%==========================================================================
clear all;
clc;
format long;
%% Set Value
yStoke = [0.7672 0.8638 0.9353 0.9818 1.0];
K11 = [0.0012 0.0015 0.0016 0.0017 0.0018];
Eps = [0.6716 0.7099 0.7331 0.7439 0.7487];
c = [0 0.0023; 0 0.0024;0 0.0044; 0 0.0049; 0 0.0050];
c = c*10^(5);
h = 7.5;
Rho = 992.2*10^(-15);
Mu = 3*power(10,-6);
g = 9.81*10^(6);
u0 = 0.05;
Beta = 1;
h = 7.5;
Kp = K11;
vPlus = 100;
dPplus = 10;
w1 = 0;
G = 1;
gram = [0 -0.05 0.06 0.16 -0.3];
% phiP = 1-6.*gram;
phiP = Eps;
angle = 50:10:90;
% Left and Right Boundary of Part 1 and 2
% Step Size of Y
noY = 50;
yy1 = [linspace(0,yStoke(1),noY); linspace(0,yStoke(2),noY);...
linspace(0,yStoke(3),noY); linspace(0,yStoke(4),noY);...
linspace(0,yStoke(5),noY)];
y1 = linspace(0,yStoke(5),noY+noY);
yy2 = [linspace(yStoke(1)+0.01,1,noY); linspace(yStoke(2)+0.01,1,noY);...
linspace(yStoke(3)+0.01,1,noY); linspace(yStoke(4)+0.01,1,noY)];
y = [yy1(1:4,:) yy2; y1];
nData = length(yStoke);
% Color and Style Orders of line in each figure
Col = {’r’; ’g’; ’b’; ’y’; ’m’};
Style = {’-’; ’-’; ’-’; ’-’; ’-’};
% Parameter of part 1
M1 = 1./Eps;
M2 = (h^(2))./(K11);
M3 = ((h^(2))*Rho*g)/(Mu*u0);
J1 = sqrt(M2./(2*M1));
J2 = dPplus./M2;
J3 = (h^(2).*Eps)./(M2.*K11);
J4 = M3./M2;
%% Define and Compute the solutions
for i = 1 : nData
% Part 1
t1 = J2(i)-J4(i)-(J3(i)*c(i,1));
t2 = J3(i)*c(i,2);
% Computation of part 1
j = 1;
if i ~= nData
for y1p = 1 : noY
uu1(i,j) = w1*exp(J1(i)*yy1(i,y1p))-w1*exp(-J1(i)*yy1(i,y1p))...
+t1*exp(-J1(i)*yy1(i,y1p))+t2*yy1(i,y1p)-t1;
j = j+1;
end
else
for y1p = 1 : noY
uu1(i,j) = w1*exp(J1(i)*yy1(i,y1p))-w1*exp(-J1(i)*yy1(i,y1p))...
+t1*exp(-J1(i)*yy1(i,y1p))+t2*yy1(i,y1p)-t1;
j = j+1;
end
j = 1;
for y1p = 1 : 2*noY
u1(1,j) = w1*exp(J1(i)*y1(1,y1p))-w1*exp(-J1(i)*y1(1,y1p))...
+t1*exp(-J1(i)*y1(1,y1p))+t2*y1(1,y1p)-t1;
j = j+1;
end
end
% Part 2
f1 = exp(J1(i)*(yStoke (i)/h));
f2 = exp(-J1(i)*(yStoke (i)/h));
f3 = yStoke (i)/h;
f4 = G/u0;
f5 = ((1/2)*J2(i)-(1/2)*J4(i));
f6 = 1/phiP(i);
f7 = (h*Beta)/sqrt(Kp(i));
if i ~= nData
j = 1;
% Computation of part 2 : Case 3 eq 4.23
for y2p = 1 : noY
s4(i,j) = (1/(1-f7*f3+f7))*((w1*(f6*J1(i)*f1+f6*J1(i)*f2))...
+((f7*f5*f3^2)/2)+f7*f4-((f7*f5)/2)...
-f5*f3-(f6*J1(i)*t1*f2)+(f6*J3(i)*c(i,2)));
uu4(i,j) = ((f5/2)*(yy2(i,y2p))^2)+(s4(i,j)*yy2(i,y2p))...
+f4-(f5/2)-s4(i,j);
j = j+1;
end
nPlot2{i,1} = [num2str((10*i)+40),’\circ’];
end
nPlot1{i,1} = [num2str((10*i)+40),’\circ’];
end
UU2 = cat(2,uu1(1:4,:),uu2(1:4,:));
UU3 = cat(2,uu1(1:4,:),uu3(1:4,:));
UU4 = cat(2,uu1(1:4,:),uu4(1:4,:));
U2 = cat(1,UU2,u1);
U3 = cat(1,UU3,u1);
U4 = cat(1,UU4,u1);
%% Plot Graph
% Plot Graph of each part
% part 1
figure();
plot(uu1(1,:),yy1(1,:),’r’,uu1(2,:),yy1(2,:),’g’,uu1(3,:),yy1(3,:),’b’...
,uu1(4,:),yy1(4,:),’y’,uu1(5,:),yy1(5,:),’m’);
% case 3
figure();
plot(uu4(1,:),yy2(1,:),’r’,uu4(2,:),yy2(2,:),’g’,uu4(3,:),yy2(3,:),’b’...
,uu4(4,:),yy2(4,:),’y’);
xlabel(’u’)
ylabel(’y’)
title(’The solution of u and y when y^{+} > y_{stoke} : case 3’)
legend(nPlot2,-1);
% Plot Graph of all degree
l = length(y);
% case 3
figure();
plot(U4(1,:),y(1,:),’r’,U4(2,:),y(2,:),’g’,U4(3,:),y(3,:),’b’...
,U4(4,:),y(4,:),’y’,U4(5,:),y(5,:),’m’)
xlabel(’u’)
ylabel(’y’)
% title([’The relation between u and y when y^{+} < y_ {stoke} ’...
% ’and y^{+} > y_{stoke} : case 3’])
legend(nPlot1,4);
saveas(gcf,’CompareSolStokeCase3.fig’)
References
- Machemer, H. Ciliary activity and the origin of metachrony in paramecium: Effects of increasd viscocity. J. Exp. Biol. 1972, 57, 239–259. [Google Scholar] [PubMed]
- Smith, D.J.; Smith, A.A.; Blake, J.R. Mathematical embryology: The fluid mechanics of nodal cilia. J. Eng. Math. 2011, 70, 255–279. [Google Scholar] [CrossRef]
- Fulford, G.R.; Blake, J.R. Muco–ciliary transport in the lung. J. Thero. Biol. 1986, 121, 381–402. [Google Scholar] [CrossRef]
- Jayathilake, P.G.; Tan, Z.; Le, D.V.; Lee, H.P.; Khoo, B.C. Three-dimensional numerical simulations of human pulmonary cilia in the periciliary liquid layer by the immersed boundary method. Comput. Fluids Sciencedirect. 2012, 67, 130–137. [Google Scholar] [CrossRef]
- Serafini, S.M.; Michaelson, E.D. Length and distribution of cilia in human and canine airways. Bull. Eur. Pysiopathol. Respir. 1977, 13, 551–559. [Google Scholar]
- Matsui, H.; Randell, S.H.; Peretti, S.W.; Davis, C.W.; Boucher, R.C. Coordinated clearance of pericilary liquid and mucus from airway surfaces. J. Clin. Investig. 1998, 102, 1125–1131. [Google Scholar] [CrossRef] [PubMed]
- Neale, G.; Nader, W. Practical significance of Brinkman’s extension of Darcy’slaw: Coupled parallel flows within a channel and a bounding porous medium. Can. J. Chem. Eng. 1974, 52, 475–478. [Google Scholar] [CrossRef]
- Ochoa, J.A.; Whitaker, S. Momentum transfer at the boundary between a porous medium and a homogeneous fluid—I. Theoretical development. Int. J. Heat Mass Transf. 1995, 38, 2635–2646. [Google Scholar] [CrossRef]
- Ochoa, J.A.; Whitaker, S. Momentum transfer at the boundary between a porous medium and a homogeneous fluid—II. Comparison with experiment. Int. J. Heat Mass Transfer 1995, 38, 2647–2655. [Google Scholar] [CrossRef]
- Valdes-Parada, F.J.; Aguilar-Madera, C.G.; Ochoa-Tapia, J.A.; Goyeau, B. Velocity and stress jump conditions between a porous medium and a fluid. Adv. Water Resour. 2013, 62, 327–339. [Google Scholar] [CrossRef]
- Chamsri, K. Formulation of a well-posed Stoke-Brinkman Problem with a Permeability Tensor. J. Math. 2015, 1, 1–7. [Google Scholar]
- Wuttanachamsri, K.; Schreyer, L. Effects of the Cilia movement on fluid Velocity for fixed Domain. submitted.
- Sears, P.R.; Thomson, K.; Knowles, M.R.; Davis, C.W. Human Airway Ciliary Dynamics. Am. J. Physiol. Lung Cell. Mol. Physiol. 2012, 704, L170–L183. [Google Scholar] [CrossRef] [PubMed]
- Chandesris, M.; Jamet, D. Boundary conditions at a planar fluid-porous interface for a Poiseuille flow. Int. J. Heat Mass Transf. 2006, 49, 2137–2150. [Google Scholar] [CrossRef]
- Homotopy Perturbation Method. Available online: www.shodhganga.inflibnet.ac.in/bitstream/10603/37622/9/09_chapter%202.pdf (accessed on 15 May 2019).
- He, J.-H. Fractal calculus and its geometrical explanation. Results Phys. 2018, 10, 272–276. [Google Scholar] [CrossRef]
- Fractal Calculus and Its Application to Explanation of Biomechanism of Polar Bear Hairs. Available online: www.Worldsciencetific (accessed on 3 May 2019).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value | Unit |
|---|---|---|
| h | 7.5 | |
| 1.00 | ||
| 1 | ||
| 1 | ||
| 1 | ||
| 0 | ||
| 1 |
| Variable | |||||
|---|---|---|---|---|---|
| 0.7672 | 0.8638 | 0.9353 | 0.9818 | 1.0000 | |
| 0.0012 | 0.0015 | 0.0016 | 0.0017 | 0.0018 | |
| 0.6717 | 0.7099 | 0.7331 | 0.7439 | 0.7487 | |
| 0.0023 | 0.0024 | 0.0044 | 0.0049 | 0.0050 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Poopra, S.; Wuttanachamsri, K. The Velocity of PCL Fluid in Human Lungs with Beaver and Joseph Boundary Condition by Using Asymptotic Expansion Method. Mathematics 2019, 7, 567. https://doi.org/10.3390/math7060567
Poopra S, Wuttanachamsri K. The Velocity of PCL Fluid in Human Lungs with Beaver and Joseph Boundary Condition by Using Asymptotic Expansion Method. Mathematics. 2019; 7(6):567. https://doi.org/10.3390/math7060567
Chicago/Turabian StylePoopra, Sudaporn, and Kanognudge Wuttanachamsri. 2019. "The Velocity of PCL Fluid in Human Lungs with Beaver and Joseph Boundary Condition by Using Asymptotic Expansion Method" Mathematics 7, no. 6: 567. https://doi.org/10.3390/math7060567
APA StylePoopra, S., & Wuttanachamsri, K. (2019). The Velocity of PCL Fluid in Human Lungs with Beaver and Joseph Boundary Condition by Using Asymptotic Expansion Method. Mathematics, 7(6), 567. https://doi.org/10.3390/math7060567