Global Stability of Fractional Order Coupled Systems with Impulses via a Graphic Approach


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- 1.
- For the integer derivative, the sign of the first order derivative implies the monotonicity of a function. However, this is not valid for the fractional derivative (see [47]). This difference results in great difficulties to deal with the impulses at moment .
- 2.
- For the integer-order system , the first derivative implies the asymptotically stability in the sense of Lyapunov. However, this classical Lyapunov stability result is not valid for fractional-order system. The derivative does not imply the asymptotically stability (see Lemma 2 in next section). It can only guarantee the stability.
2. Preliminaries
- (i)
- For the Lyapunov function on each vertex. There exist , , and such thatholds.
- (ii)
- Along each directed cycle in the weighted digraph , ,
- (iii)
- are constants which are given in Lemma 3.Then satisfieswhere .
3. Main Results
- (1)
- ;
- (2)
- , where ;
- (3)
- In each interval, satisfies .
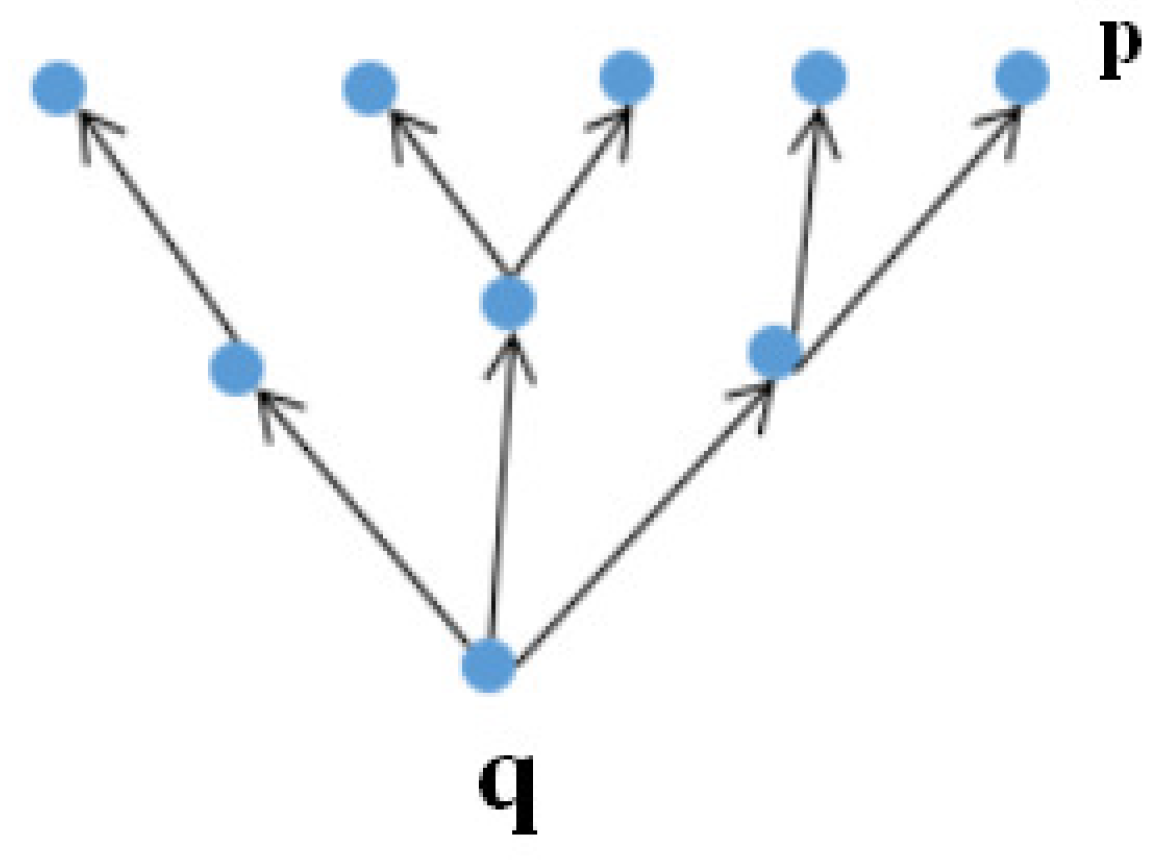
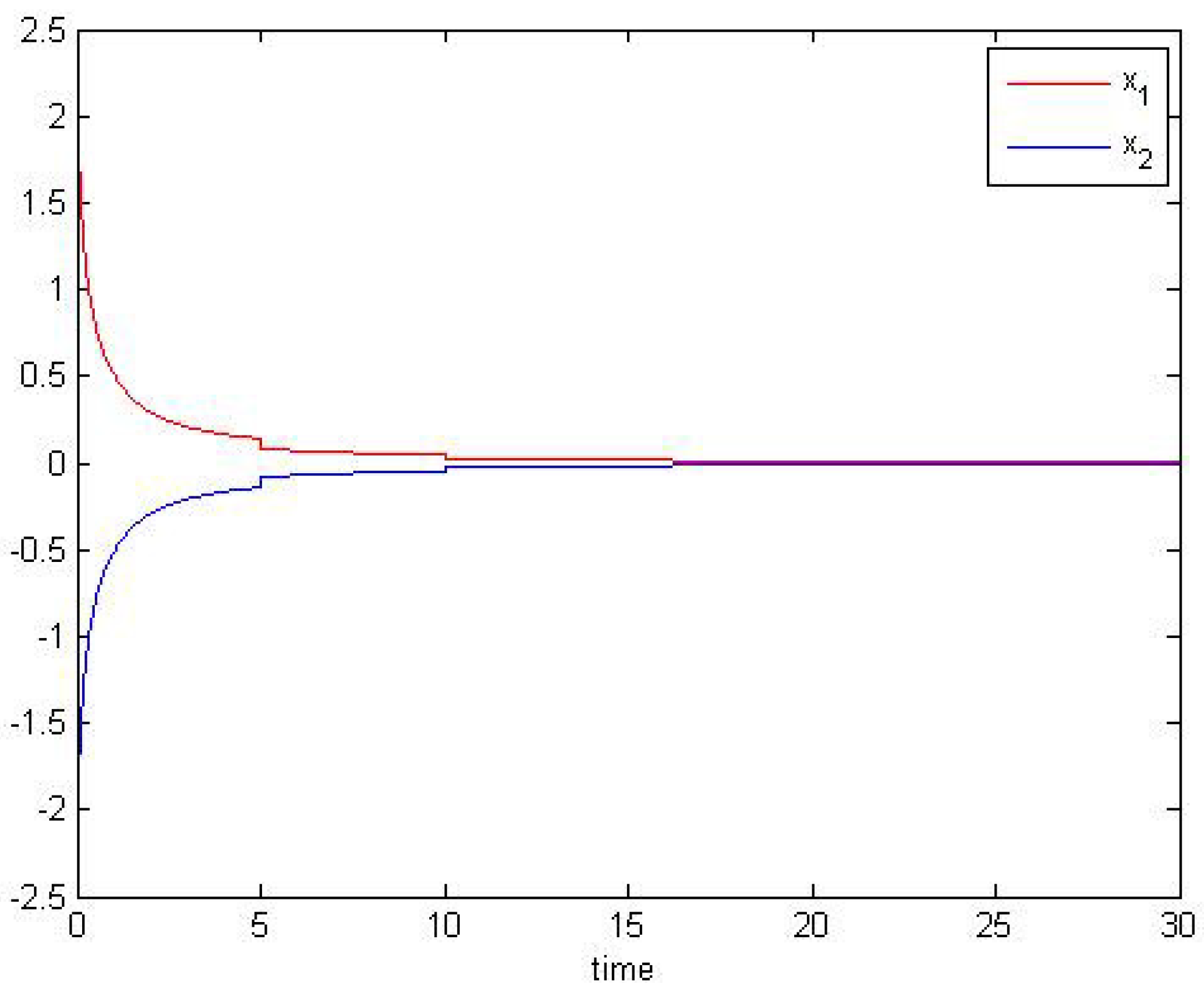
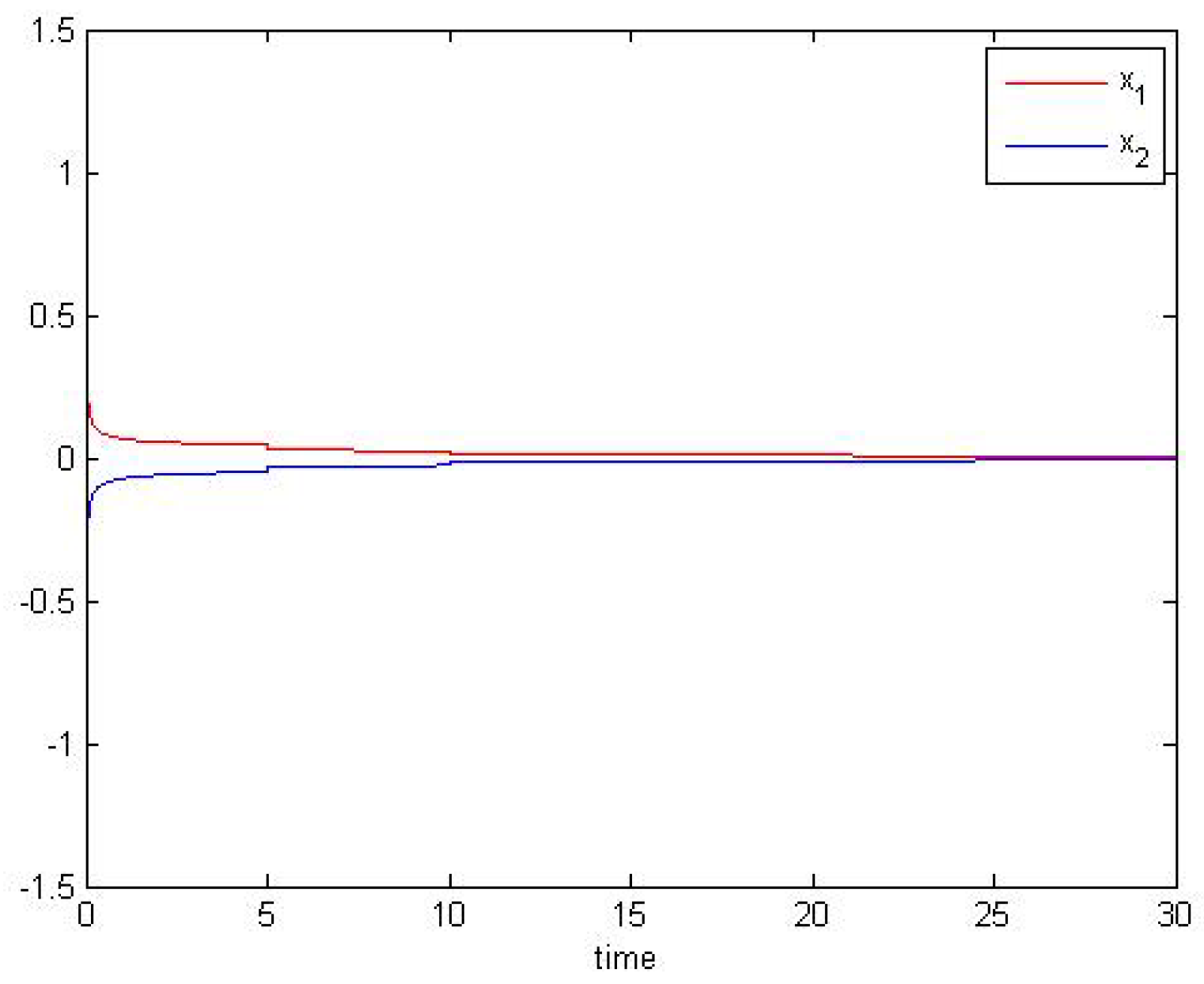
4. Example and Numerical Simulation
5. Conclusions and Discussions
- 1.
- For the integer derivative, the sign of the first order derivative implies the monotonicity of a function. However, this is not valid for the fractional derivative (see [47]). This difference raises great difficulties for us to deal with the impulses at moment . In order to ensure the stability of the trivial solution of (5), we have to add the condition .
- 2.
- For the integer-order system , the first derivative implies the asymptotically stability in the sense of Lyapunov. However, this classical Lyapunov stability result is not valid for fractional-order system. The derivative does not imply the asymptotically stability in view of Lemma 2. It can only guarantee the stability.
Author Contributions
Funding
Conflicts of Interest
References
- Ali, M.S.; Gunasekaran, N.; Cao, J. Sampled-data state estimation for neural networks with additive time-varying delays. Acta Math. Sci. 2019, 39, 195–213. [Google Scholar]
- Ali, M.S.; Gunasekaran, N.; Agalya, R.; Joo, Y.H. Non-fragile synchronisation of mixed delayed neural networks with randomly occurring controller gain fluctuation. Int. J. Syst. Sci. 2018, 49, 3354–3364. [Google Scholar]
- Balasubramaniam, P.; Chandran, R.; Jeeva, S. Synchronization of chaotic nonlinear continuous neural with time-varying delay. Cogn. Neurodyn. 2011, 5, 361–371. [Google Scholar] [CrossRef]
- Bao, H.B.; Park, J.H.; Cao, J.D. Synchronization of fractional-order memristor-based neural networks with time delay. Nonlinear Dynam. 2015, 158, 1343–1354. [Google Scholar] [CrossRef]
- Chen, H.; Sun, J.T. Stability analysis for coupled systems with time delay on networks. Physica A 2012, 391, 528–534. [Google Scholar] [CrossRef]
- Chen, J.; Zeng, Z.; Jiang, P. Global Mittag-Lefflter stability and synchronization of memristor-based fractional-order neural networks. Neural Netw. 2014, 51, 1–8. [Google Scholar] [CrossRef]
- Chen, L.; Huang, C.; Liu, H.; Xia, Y. Anti-synchronization of a class of chaotic systems with application to Lorenz system: a unified analysis of the integer order and fractional order. Mathematics 2019, 7, 559. [Google Scholar] [CrossRef]
- Li, H.; Cao, J.; Hu, C.; Zhang, L.; Wang, Z. Global synchronization between two fractional-order complex networks with non-delayed and delayed coupling via hybrid impulsive control. Neurocomputing 2019, 356, 31–39. [Google Scholar] [CrossRef]
- Li, H.; Wang, Y. On reachability and controllability of switched Boolean control networks. Automatica 2012, 48, 2917–2922. [Google Scholar] [CrossRef]
- Liu, X.; Ho, D.W.; Yu, W.; Cao, J. A new switching design to finite-time stabilization of nonlinear systems with applications to neural networks. Neural Netw. 2014, 57, 94–102. [Google Scholar] [CrossRef]
- Liu, X.; Su, H.; Chen, M. A switching approach to designing finite-time synchronizing controllers of couple neural networks. Trans. Neural Netw. Learn. Syst. 2016, 27, 471–482. [Google Scholar] [CrossRef]
- Zhang, B.; Zhuang, J.; Liu, H.; Cao, J.; Xia, Y. Master-slave synchronization of a class of fractional-order Takagi-Sugeno fuzzy neural networks. Adv. Differ. Equ. 2018, 473. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhuang, J.; Xia, Y.; Bai, Y.; Cao, J.; Gu, L. Fixed-time synchronization of the impulsive memristor-based neural networks. Commun. Nonlinear Sci. Numer. Simulat. 2019, 77, 40–53. [Google Scholar] [CrossRef]
- Zhang, W.; Wu, R.; Cao, J.; Alsaedi, A. Synchronization of a class of fractional-order neural networks with multiple time delays by comparison. Nonlinear Anal. Model. Control 2017, 22, 636–645. [Google Scholar] [CrossRef]
- Zhuang, J.; Cao, J.; Tang, L.; Xia, Y.; Prec, M. Synchronization analysis for stochastic delayed multi-layer network with additive coupling. IEEE Trans. Syst. Man Cybern. Syst. 2018, 99, 1–10. [Google Scholar] [CrossRef]
- Anderson, J.; Kim, E.; Moradi, S. A fractional Fokker-Planck model for anomalous diffusion. Phys. Plasmas 2014, 21, 122109. [Google Scholar] [CrossRef] [Green Version]
- Anderson, J.; Moradi, S.; Rafiq, T. Non-linear Langevin and Fractional Fokker-Planck equations for anomalous diffusion by Lévy Stable Processes. Entropy 2018, 20, 760. [Google Scholar] [CrossRef]
- Del-Castillo-Negrete, D. Non-diffusive, non-local transport in fluids and plasmas. Nonlinear Process. Geophys. 2010, 17, 795–807. [Google Scholar] [CrossRef] [Green Version]
- Da Fonseca, J.D.; del-Castillo-Negrete, D.; Caldas, I.L. Area-preserving maps models of gyroaveraged E × B Chaotic transport. Phys. Plasmas 2014, 21, 092310. [Google Scholar] [CrossRef]
- Tarasov, V.E. Fractional Liouville and BBGKI equations. J. Phys. Conf. Ser. 2005, 7, 17–33. [Google Scholar] [CrossRef] [Green Version]
- Tarasov, V.E. Fractional statistical mechanics. Chaos 2006, 16, 331081–331087. [Google Scholar] [CrossRef]
- Zaslavsky, G.M. Chaos, fractional kinetics, and anomalous transport. Phys. Rep. 2002, 371, 461–580. [Google Scholar] [CrossRef]
- Li, X.; Ho, D.W.; Cao, J. Finite-time stability and settling-time estimation of nonlinear impulsive systems. Automatica 2019, 99, 361–368. [Google Scholar] [CrossRef]
- Li, X.; Song, S. Stabilization of delay systems: Delay-dependent impulsive control. Trans. Autom. Control 2017, 62, 406–411. [Google Scholar] [CrossRef]
- Li, X.; Wu, J. Sufficient stability conditions of nonlinear differential systems under impulsive control with state-dependent delay. Trans. Autom. Control 2018, 63, 306–311. [Google Scholar] [CrossRef]
- Lu, J.; Ho, D.W.; Cao, J.; Kurths, J. Exponential synchronization of linearly coupled neural networks with impulsive disturbances. Trans. Neural Netw. 2011, 22, 329–336. [Google Scholar] [CrossRef]
- Lu, J.; Kurths, J.; Cao, J.; Mahdavi, N. Synchronization control for nonlinear stochastic dynamical networks: pinning impulsive strategy. Trans. Neural Netw. Learn. Syst. 2012, 23, 285–292. [Google Scholar]
- Xia, Y.; Cao, J.; Cheng, S.S. Global exponential stability of delayed cellular neural networks with impulses. Neurocomputing 2007, 70, 2495–2501. [Google Scholar] [CrossRef]
- Guo, H.; Li, M.Y.; Shuai, Z. Global dynamics of a general class of multistage models for infectious diseases. SIAM J. Appl. Math. 2012, 72, 261–279. [Google Scholar] [CrossRef]
- Nieto, J.; Stamov, G.; Stamova, I. A fractional-order impulsive delay model of price fluctuations in commodity markets: Almost periodic solutions. Eur. Phys. J. Spec. Top. 2017, 226, 3811–3825. [Google Scholar] [CrossRef]
- Stamov, G.; Stamova, I. Impulsive fractional functional differential systems and Lyapunov method for the existence of almost periodic solutions. Rep. Math. Phys. 2015, 75, 73–84. [Google Scholar] [CrossRef]
- Stamov, G.; Stamova, I.; Cao, J. Uncertain impulsive functional differential systems of fractional order and almost periodicity. J. Frankl. Inst. 2018, 355, 5310–5323. [Google Scholar] [CrossRef]
- Stamova, I. Global Mittag-Leffler stability and synchronization of impulsive fractional-order neural networks with time-varying delays. Nonlinear Dynam. 2014, 77, 1251–1260. [Google Scholar] [CrossRef]
- Stamova, I. Global stability of impulsive fractional differential equations. Appl. Math. Comput. 2014, 237, 605–612. [Google Scholar] [CrossRef]
- Wang, F.; Yang, Y.; Hu, M. Asymptotic stability of delayed fractional-order neural networks with impulsive effects. Neurocomputing 2015, 154, 239–244. [Google Scholar] [CrossRef]
- Wang, J.; Zhou, Y.; Fečkan, M. Nonlinear impulsive problems for fractional differential equations and Ulam stability. Comput. Math. Appl. 2012, 64, 3389–3405. [Google Scholar] [CrossRef] [Green Version]
- Guo, H.; Li, M.Y.; Shuai, Z. A graph-theoretic approach to the method of global Lyapunov functions. Proc. Am. Math. Soc. 2008, 136, 2793–2802. [Google Scholar] [CrossRef]
- Guo, B.; Xiao, Y.; Zhang, C. Graph-theoretic approach to exponential synchronization of coupled systems on networks with mixed time-varying delays. J. Frankl. Inst. 2017, 354, 5067–5090. [Google Scholar] [CrossRef]
- Guo, B.; Xiao, Y.; Zhang, C. Synchronization analysis of stochastic coupled systems with time delay on networks by periodically intermittent control and graph-theoretic method. Nonlinear Anal. Hybrid Syst. 2018, 30, 118–133. [Google Scholar] [CrossRef]
- Li, M.Y.; Shuai, Z.S. Global-stability problem for coupled systems of differential equations on networks. J. Differ. Equ. 2010, 248, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Suo, J.; Sun, J.; Zhang, Y. Stability analysis for impulsive coupled systems on networks. Neurocomputing 2013, 99, 172–177. [Google Scholar] [CrossRef]
- Zhang, C.; Li, W.; Wang, K. Graph-theoretic method on exponential synchronization of stochastic coupled networks with Markovian switching. Nonlinear Anal. Hybrid Syst. 2015, 15, 37–51. [Google Scholar] [CrossRef]
- Guo, Y.; Ding, X. Razumikhin method to global exponential stability for coupled neutral stochastic delayed systems on networks. Math. Meth. Appl. Sci. 2017, 40, 5490–5501. [Google Scholar] [CrossRef]
- Li, X.; Yang, X.; Huang, T. Persistence of delayed cooperative models: Impulsive control method. Appl. Math. Comput. 2019, 342, 130–146. [Google Scholar] [CrossRef]
- Li, X.; Shen, J.; Rakkiyappan, R. Persistent impulsive effects on stability of functional differential equations with finite or infinite delay. Appl. Math. Comput. 2018, 329, 14–22. [Google Scholar] [CrossRef]
- Shen, J.; Chen, L.; Yuan, X. Lagrange stability for impulsive Duffing equations. J. Differ. Equ. 2019, 266, 6924–6962. [Google Scholar] [CrossRef]
- Gallegos, J.A.; Duarte-Mermoud, M.A. On the Lyapunov theory for fractional order systems. Appl. Math. Comput. 2016, 287, 161–170. [Google Scholar] [CrossRef]
- Lakshmikantham, V.; Leela, S.; Sambandham, M. Lyapunov theory for fractional differential equations. Commun. Appl. Anal. 2008, 12, 365–376. [Google Scholar]
- Liang, J.; Tang, L.; Xia, Y.; Zhang, Y. Bifurcations and exact solutions for a class of mKdV equation with the conformable fractional derivative via dynamical system method. Int. J. Bifur. Chaos 2020. to appear in the first issue. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Zhu, W.; Xia, Y.; Zhang, B.; Bai, Y. Exact traveling wave solutions and bifurcations of the time fractional differential equations with applications. Int. J. Bifur. Chaos 2019, 29, 1950041. [Google Scholar] [CrossRef]
- Aguila-Camacho, N.; Duarte-Mermoud, M.A.; Gallegos, J.A. Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2951–2957. [Google Scholar] [CrossRef]
- Diestel, R. Graph Theory; Springer: New York, NY, USA, 2000. [Google Scholar]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, B.; Xia, Y.; Zhu, L.; Liu, H.; Gu, L. Global Stability of Fractional Order Coupled Systems with Impulses via a Graphic Approach. Mathematics 2019, 7, 744. https://doi.org/10.3390/math7080744
Zhang B, Xia Y, Zhu L, Liu H, Gu L. Global Stability of Fractional Order Coupled Systems with Impulses via a Graphic Approach. Mathematics. 2019; 7(8):744. https://doi.org/10.3390/math7080744
Chicago/Turabian StyleZhang, Bei, Yonghui Xia, Lijuan Zhu, Haidong Liu, and Longfei Gu. 2019. "Global Stability of Fractional Order Coupled Systems with Impulses via a Graphic Approach" Mathematics 7, no. 8: 744. https://doi.org/10.3390/math7080744
APA StyleZhang, B., Xia, Y., Zhu, L., Liu, H., & Gu, L. (2019). Global Stability of Fractional Order Coupled Systems with Impulses via a Graphic Approach. Mathematics, 7(8), 744. https://doi.org/10.3390/math7080744