Design and Verification of Cyber-Physical Systems Specified by Petri Nets—A Case Study of a Direct Matrix Converter

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
- A novel design technique of a control part of a cyber-physical system specified by a live and safe Petri net is proposed in the paper. The proposed idea is oriented toward the hardware implementation of the CPS. Contrary to similar design methods, the presented approach highly utilises verification aspects of the designed system, especially the control part of the CPS;
- The system is verified three times during the prototyping process. Initially, a model-checking and analysis of the primary specification is performed. Secondly, the software verification of the modelled system is executed. Eventually, the CPS is once more examined, after the final implementation in hardware;
- The proposed method does not apply external tools (except MATLAB/Simulink), nor any additional conversions. In particular, any model-checking tool can be used in order to perform a formal verification of the system. Moreover, analysis of the system can be done with the application of any known methods that allow examination of the main properties of a Petri net (liveness, safeness, reachability, etc.). Furthermore, there are no restrictions regarding software verification, since any known HDL-simulator can be applied to produce data for further analysis in MATLAB/Simulink software;
- The proposed technique is explained by a case-study example of a direct matrix converter (MC) with transistor commutation and space vector modulation (SVM). The system is specified by a safe and live Petri net, described in the Verilog hardware description language and finally implemented in an FPGA device. Based on the MC example, also the usefulness of the proposed verification-oriented approach is shown.
2. Theoretical Background
2.1. Petri Nets
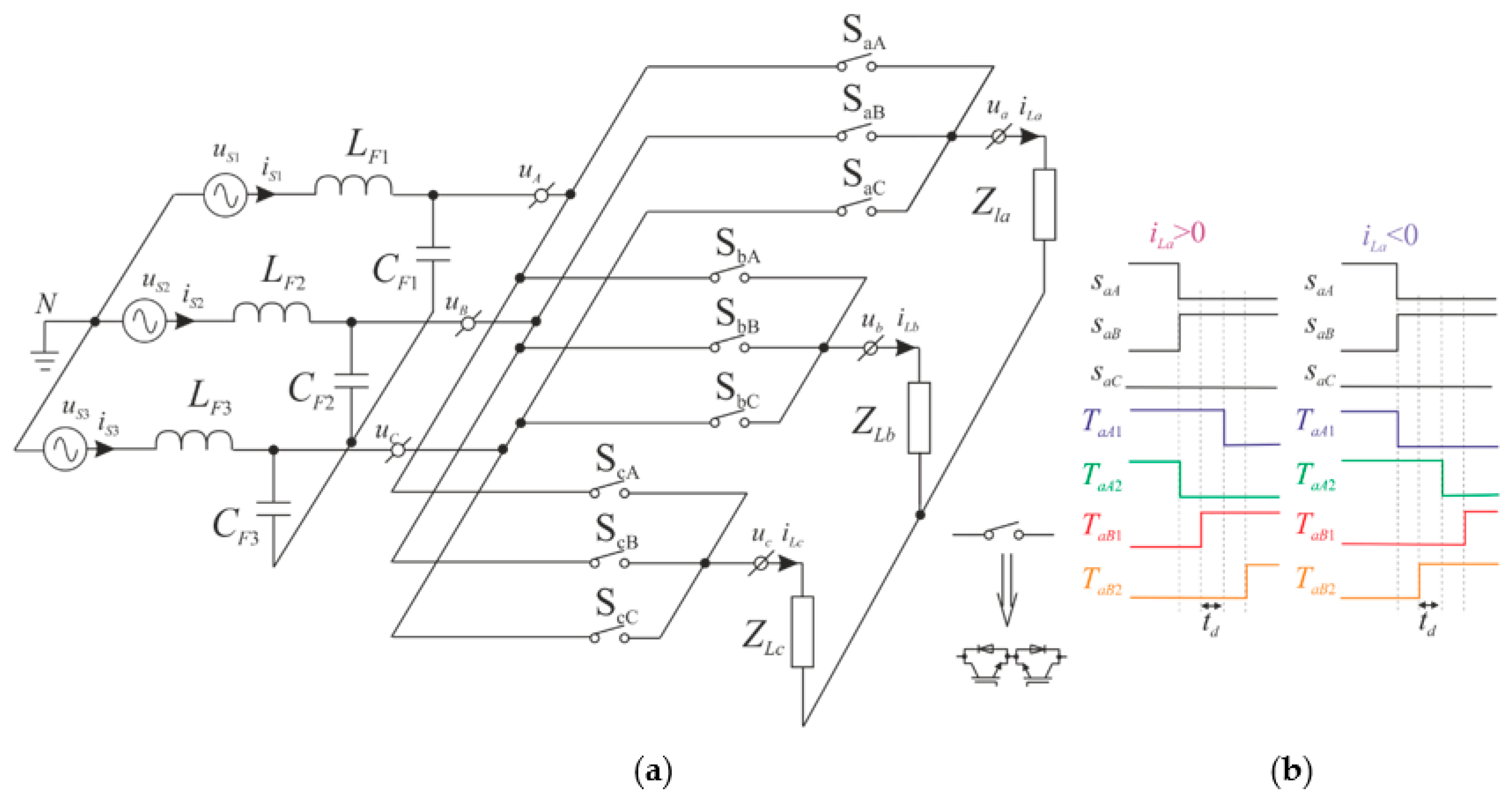
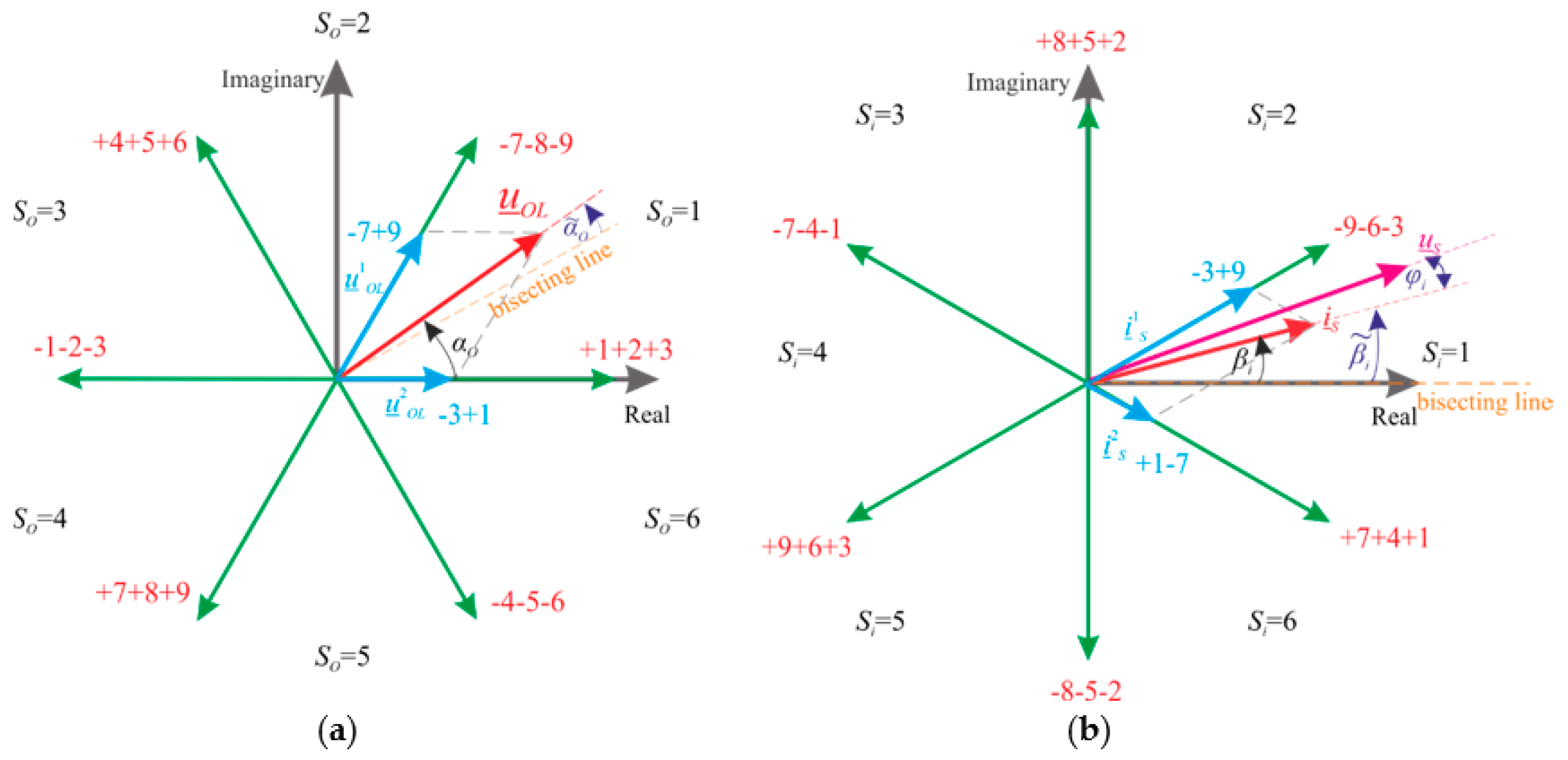
2.2. Matrix Converter with Space Vector Modulation Algorithm
3. The Idea of the Proposed Method
- Specification of the CPS by a safe and live Petri net (based on the system requirements);
- Formal verification and analysis of the initial specification;
- Modelling of the system;
- Software verification of the system;
- Hardware implementation of the system with the application of the programmable device;
- Hardware verification of the system.
3.1. Specification of the CPS by a Petri Net
3.2. Formal Verification and Analysis of the Initial Specification
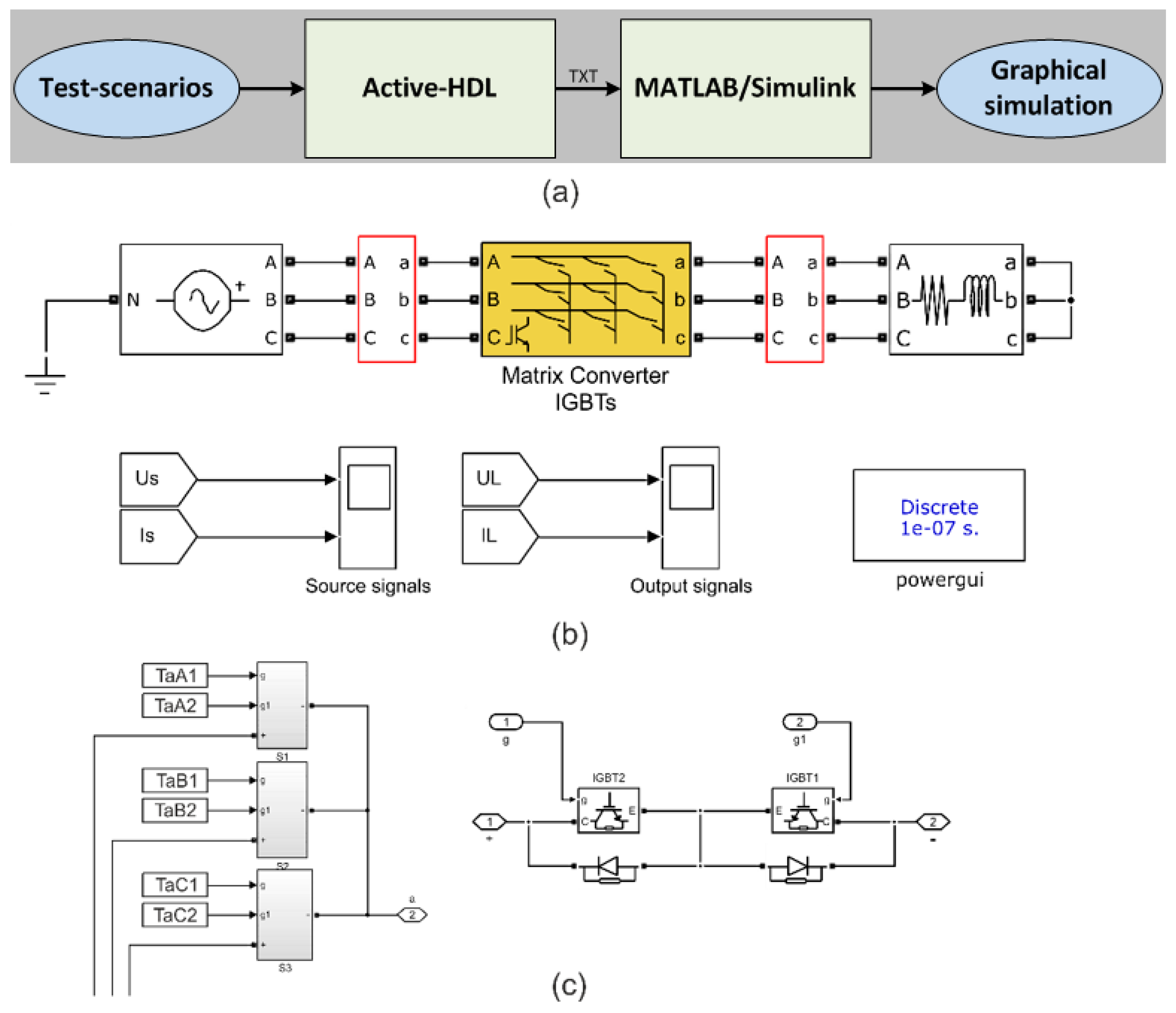
3.3. Modelling of the System
3.4. Software Verification of the System
3.5. Hardware Implementation of the System with the Application of the Programmable Device
3.6. Hardware Verification
4. Case-Study Example (Hardware Implementation of the Proposed Method)
4.1. Specification of the System with the Use of a Petri Net
4.2. Formal Verification and Analysis of the Initial Specification

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
TRANSITIONS t1: p1 -> X (!p1 & p2 & p3 & p4 & p5 & p6 & p7); t2: p3 -> X (!p3 & p8 & p10); t3: p4 -> X (!p4 & p9 & p11); t4: p5 -> X (!p5 & p12 & p14); t5: p6 -> X (!p6 & p13 & p15); t6: p2 & p8 & p9 -> X (!p2 & !p8 & !p9 & p16); t7: p10 & p11 -> X (!p10 & !p11 & p17); t8: p12 & p13 -> X (!p12 & !p13 & p18); t9: p7 & p14 & p15 -> X (!p7 & !p14 & !p15 & p19); t10: p16 & p17 -> X (!p16 & !p17 & p20); t11: p18 & p19 -> X (!p18 & !p19 & p21); t12: p20 -> X (!p20 & p22); t13: p21 -> X (!p21 & p23); t14: p22 -> X (!p22 & p24); t15: p23 -> X (!p23 & p25); t16: p24 & p25 -> X (!p24 & !p25 & p26 & p27 & p28 & p29); t17: p26 -> X (!p26 & p30); t18: p27 -> X (!p27 & p31); t19: p28 -> X (!p28 & p32); t20: p29 -> X (!p29 & p33); t21: p30 -> X (!p30 & p34 & p38); t22: p31 -> X (!p31 & p36 & p40); t23: p32 -> X (!p32 & p35 & p37); t24: p33 -> X (!p33 & p39 & p41); t25: p34 & p35 -> X (!p34 & !p35 & p42); t26: p36 & p37 -> X (!p36 & !p37 & p43); t27: p38 & p39 -> X (!p38 & !p39 & p44); t28: p40 & p41 -> X (!p40 & !p41 & p45); t29: p42 & p43 & p44 & p45 -> X (!p42 & !p43 & !p44 & !p45 & p46); t30: p46 -> X (!p46 & p47 & p48 & p49); t31: p47 & p48 & p49 -> X (!p47 & !p48 & !p49 & p1); |
4.3. Modelling of the System
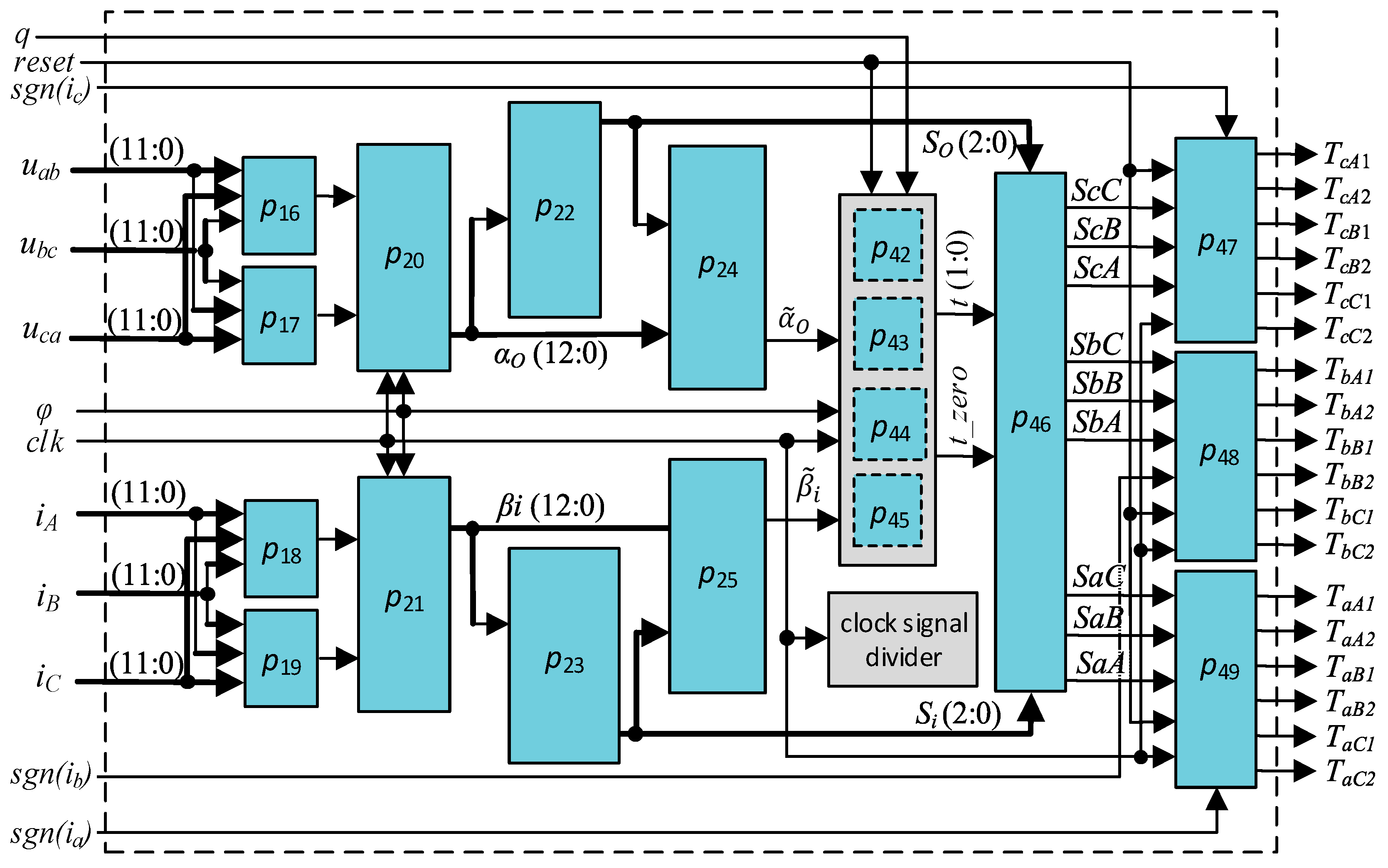
- four modules (, …, ) are responsible for calculation of the real and imaginary parts of the space vector for voltages and currents;
- two modules (, ) perform angle computation of the space vectors;
- two modules (, ) compute sectors of the space vectors;
- two modules (, ) realise angle normalisation;
- four modules (, …, ) execute duty computation and organisation;
- one module () is responsible for switching of the PWM signals;
- three modules (, …, ) generate final commutation signals;
- one module was designed for clock signal (clk) division.
//computation of Re: result=2/3*x1-1/3*x2-1/3*x3
module Calculate_Re(result,x1,x2,x3);
output [12:0] result;
input [12:0] x1,x2,x3;
wire signed [12:0] x1_signed,x2_signed,x3_signed;
Multiply_1QN m1 (x1_signed,x1,13’b 0001010101010); //2/3 * x1
Multiply_1QN m2 (x2_signed,x2,13’b 0001010101010); //1/3 * x2
Multiply_1QN m3 (x3_signed,x3,13’b 0001010101010); //1/3 * x3
wire signed [12:0] Re_signed;
wire [12:0] Re;
assign Re_signed=x1_signed+x1_signed-x2_signed-x3_signed;
assign Re=(Re_signed [12:11]==2’b10)?13’b1100000000000:
(Re_signed [1 2:11]==2’b01)?13’b0100000000000:Re_signed;
assign result=Re;
endmodule
|
4.4. Software Verification of the System
4.5. Hardware Implementation of the System
- the sequence of modulation period was set to 100 kHz (the value of was set to 10 μs);
- the commutation switch period was set to 0.2 μs;
- the value of the parameter (used in Equations (6)–(9)) was set to 0 (constant value);
- the main oscillator (clock signal) frequency was set to 100 MHz.
4.6. Hardware Verification of the System
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lee, E.A.; Seshia, S.A. Introduction to Embedded Systems, A Cyber-Physical Systems Approach, 2nd ed.; print. 1.08.; LeeSeshia.org: Lulu, CO, USA, 2017; ISBN 9780557708574. [Google Scholar]
- Yu, Z.; Zhou, L.; Ma, Z.; El-Meligy, M.A. Trustworthiness modeling and analysis of cyber-physical manufacturing systems. IEEE Access 2017, 5, 26076–26085. [Google Scholar] [CrossRef]
- Karatkevich, A. Dynamic Analysis of Petri Net-Based Discrete Systems; Lecture notes in control and information sciences; Springer: Berlin, Germany, 2007; ISBN 9783540714644. [Google Scholar]
- Ali, S.; Balushi, T.A.; Nadir, Z.; Hussain, O.K. Cyber Security for Cyber Physical Systems; Springer International Publishing AG, Springer: Cham, Switzerland, 2018. [Google Scholar]
- Dey, N.; Ashour, A.S.; Shi, F.; Fong, S.J.; Tavares, J.M.R.S. Medical cyber-physical systems: A survey. J. Med. Syst. 2018, 42, 74. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, Y.; Qiu, M.; Tsai, C.-W.; Hassan, M.M.; Alamri, A. Health-CPS: Healthcare cyber-physical system assisted by cloud and big data. IEEE Syst. J. 2017, 11, 88–95. [Google Scholar] [CrossRef]
- Shih, C.-S.; Chou, J.-J.; Reijers, N.; Kuo, T.-W. Designing CPS/IoT applications for smart buildings and cities. IET Cyber-Phys. Syst. Theory Appl. 2016, 1, 3–12. [Google Scholar] [CrossRef]
- Guo, Y.; Hu, X.; Hu, B.; Cheng, J.; Zhou, M.; Kwok, R.Y.K. Mobile cyber physical systems: Current challenges and future networking applications. IEEE Access 2018, 6, 12360–12368. [Google Scholar] [CrossRef]
- Khaitan, S.K.; McCalley, J.D. Cyber physical system approach for design of power grids: A survey. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 25 November 2013; pp. 1–5. [Google Scholar]
- Khaitan, S.K.; McCalley, J.D. Design techniques and applications of cyberphysical systems: A survey. IEEE Syst. J. 2015, 9, 350–365. [Google Scholar] [CrossRef]
- Hahanov, V. Cyber Physical Computing for IoT-DRIVEN Services; Springer International Publishing AG, Springer: Cham, Switzerland, 2018; ISBN 9783319548258. [Google Scholar]
- Huang, D.; Deng, Z.; Wan, S.; Mi, B.; Liu, Y. Identification and prediction of urban traffic congestion via cyber-physical link optimization. IEEE Access 2018, 6, 63268–63278. [Google Scholar] [CrossRef]
- Gomes, L.; Barros, J.; Costa, A. Modeling Formalisms for Embedded System Design, Embedded Systems Handbook; Taylor and Francis Group, LLC: London, UK, 2006. [Google Scholar]
- Peng, S.S.; Zhou, M.C. Ladder diagram and Petri-net-based discrete event control design methods. IEEE Trans. Syst. Man Cybern. Appl. Rev. 2004, 34, 523–531. [Google Scholar] [CrossRef]
- Grobelny, M.; Grobelna, I.; Adamski, M. Hardware behavioural modelling, verification and synthesis with UML 2.x activity diagrams. In Proceedings of the 11th IFAC/IEEE International Conference on Programmable Devices and Embedded Systems—PDeS 2012, Brno, Czech Republic, 23–25 May 2012; pp. 109–114. [Google Scholar]
- Goran, F. An Introduction to Hybrid Automata, Numerical Simulation and Reachability Analysis. In Formal Modeling and Verification of Cyber-Physical Systems; Drechsler, R., Kühne, U., Eds.; Springer Vieweg: Wiesbaden, Germany, 2015; pp. 50–81. [Google Scholar]
- Zhao, H.; Sun, D.; Yue, H.; Zhao, M.; Cheng, S. Using CSTPNs to model traffic control CPS’. IET Softw. 2017, 11, 116–125. [Google Scholar] [CrossRef]
- Fu, Y.; Zhu, J.; Gao, S. CPS information security risk evaluation system based on Petri Net. In Proceedings of the 2017 IEEE Second International Conference on Data Science in Cyberspace (DSC), Shenzhen, China, 26–29 June 2017; pp. 541–548. [Google Scholar]
- Gavrilescu, M.; Magureanu, G.; Pescaru, D.; Jian, I. Towards UML software models for cyber physical system applications. In Proceedings of the 20th Telecommunications Forum (TELFOR), Belgrade, Serbia, 20–22 November 2012; pp. 1701–1704. [Google Scholar] [CrossRef]
- David, R.; Alla, H. Discrete, Continuous, and Hybrid Petri Nets; Springer: Berlin/Heidelberg, Germany, 2010; ISBN 9783642106682. [Google Scholar]
- Reisig, W. Petri Nets: An Introduction; EATCS Monographs on Theoretical Computer Science; Springer: Berlin; Germany, 1985; ISBN 9780387137230. [Google Scholar]
- Ye, J.; Zhou, M.; Li, Z.; Al-Ahmari, A. Structural decomposition and decentralized control of petri nets. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1360–1369. [Google Scholar] [CrossRef]
- Wisniewski, R.; Wisniewska, M.; Jarnut, M. C-exact hypergraphs in concurrency and sequentiality analyses of cyber-physical systems specified by safe petri nets. IEEE Access 2019, 7, 13510–13522. [Google Scholar] [CrossRef]
- Ran, N.; Hao, J.; He, Z.; Seatzu, C. Diagnosability analysis of bounded Petri nets. In Proceedings of the 2018 IEEE 23rd International Conference on Emerging Technologies and Factory Automation (ETFA 2018), Turin, Italy, 4–7 September 2018; pp. 1145–1148. [Google Scholar]
- Wu, N.; Zhou, M. System Modeling and Control with Resource-Oriented Petri Nets; Automation and Control Engineering; CRC Press: Boca Raton, FL, USA, 2010; ISBN 9781439808849. [Google Scholar]
- Grobelna, I.; Wisniewski, R.; Grobelny, M.; Wisniewska, M. Design and verification of real-life processes with application of petri nets. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2856–2869. [Google Scholar] [CrossRef]
- Gruson, F.; Le Moigne, P.; Delarue, P.; Videt, A.; Cimetiere, X.; Arpilliere, M. A simple carrier-based modulation for the SVM of the matrix converter. IEEE Trans. Ind. Inf. 2013, 9, 947–956. [Google Scholar] [CrossRef]
- Wang, J.; Song, Y.; Li, W.; Guo, J.; Monti, A. Development of a universal platform for hardware in-the-loop testing of microgrids. IEEE Trans. Ind. Inf. 2014, 10, 2154–2165. [Google Scholar] [CrossRef]
- Gan, M.; Wang, S.; Ding, Z.; Zhou, M.; Wu, W. An improved mixed-integer programming method to compute emptiable minimal siphons in S3PR nets. IEEE Trans. Control Syst. Technol. 2018, 26, 2135–2140. [Google Scholar] [CrossRef]
- Hehenberger, P.; Vogel-Heuser, B.; Bradley, D.; Eynard, B.; Tomiyama, T.; Achiche, S. Design, modelling, simulation and integration of cyber physical systems: Methods and applications. Comput. Ind. 2016, 82, 273–289. [Google Scholar] [CrossRef] [Green Version]
- Lefèvre, J.; Charles, S.; Bosch-Mauchand, M.; Eynard, B.; Padiolleau, E.J. Multidisciplinary modelling and simulation for mechatronic design. Des. Res. (Jdr) 2014, 12, 127–144. [Google Scholar] [CrossRef]
- Faruque, M.A.; Canedo, A. Design Automation of Cyber-Physical Systems; Springer International Publishing: Cham, Switzerland, 2019. [Google Scholar]
- Kim, K.D.; Kumar, P.R. Cyber–physical systems: A perspective at the centennial. Proc. IEEE 2012, 100, 1287–1308. [Google Scholar]
- Quadri, I.R.; Bagnato, A.; Brosse, E.; Sadovykh, A. Modeling methodologies for cyber-physical systems: Research field study on inherent and future challenges. Ada User J. 2015, 36, 246–253. [Google Scholar]
- Karsai, G.; Sztipanovits, J. Model-integrated development of cyber-physical systems. In Brinkschulte Software Technologies for Embedded and Ubiquitous Systems; SEUS Lecture Notes in Computer Science, 5287; Springer: Berlin/Heidelberg, Germany, 20008. [Google Scholar]
- Kolberg, D.; Berger, C.; Pirvu, B.C.; Franke, M.; Michniewicz, J. CyProF—insights from a framework for designing cyber-physical systems in production environments. Procedia CIRP 2016, 57, 32–37. [Google Scholar] [CrossRef]
- Zech, A.; Stetter, R.; Holder, K.; Rudolph, S.; Till, M. Novel approach for a holistic and completely digital represented product development process by using graph-based design languages. Procedia Cirp 2019, 79, 568–573. [Google Scholar] [CrossRef]
- Gerostathopoulos, I. Model-Driven Development of Software-Intensive Cyber-Physical Systems. Ph.D. Thesis, Charles University in Prague, Prague, Czechk Republic, 2015. [Google Scholar]
- Darragi, N.; Miloudi, E.; Koursi, E.; Collart-Dutilleul, S. Architecture Description Language for Cyber Physical Systems Analysis: A Railway Control System Case Study. In Proceedings of the 14th International conference on Railway Engineering Design and Optimization (COMPRAIL), Rome, Italy, 24–26 June 2014. [Google Scholar]
- Drechsler, R.; Kühne, U. Formal Modeling and Verification of Cyber-Physical Systems; Springer Vieweg: Wiesbaden, Germany, 2015. [Google Scholar]
- Zheng, X.; Julien, C.; Kim, M.; Khurshid, S. Perceptions on the state of the art in verification and validation in cyber-physical systems. IEEE Syst. J. 2017, 11, 2614–2627. [Google Scholar] [CrossRef]
- Sun, Y.; McMillin, B.; Liu, X.; Cape, D. Verifying noninterference in a cyber-physical system the advanced electric power grid. In Proceedings of the Seventh International Conference on Quality Software (QSIC 2007), Portland, OR, USA, 11–12 October 2007; pp. 363–369. [Google Scholar] [CrossRef]
- Akella, R.; McMillin, B.M. Model-checking BNDC properties in cyber-physical systems. In Proceedings of the 33rd Annual IEEE International Computer Software and Applications Conference, Seattle, WA, USA, 20–24 July 2009; pp. 660–663. [Google Scholar] [CrossRef]
- Automated Technology for Verification and Analysis: 9th International Symposium. In Lecture Notes in Computer Science, Proceedings of the ATVA 2011, Taipei, Taiwan, 11–14 October 2011; Bultan, T.; Hsiung, P.-A. (Eds.) Springer: Berlin/Heidelberg, Germany, 2011; Volume 6996, ISBN 9783642243714. [Google Scholar] [CrossRef]
- Bu, L.; Wang, Q.; Chen, X.; Wang, L.; Zhang, T.; Zhao, J.; Li, X. Toward online hybrid systems model checking of cyber-physical systems’ time-bounded short-run behavior. SIGBED Rev. 2011, 8, 7–10. [Google Scholar] [CrossRef]
- Thacker, R.A.; Jones, K.R.; Myers, C.J.; Zheng, H. Automatic abstraction for verification of cyber-physical systems. In Proceedings of the 1st ACM/IEEE International Conference on Cyber-Physical Systems—ICCPS ’10; ACM Press: Stockholm, Sweden, 2010; p. 12. [Google Scholar] [CrossRef]
- Zheng, X.; Julien, C. Verification and validation in cyber physical systems: Research challenges and a way forward. In Proceedings of the 2015 IEEE/ACM 1st International Workshop on Software Engineering for Smart Cyber-Physical Systems, Florence, Italy, 16–24 May 2015; pp. 15–18. [Google Scholar] [CrossRef]
- Wisniewski, R. Dynamic partial reconfiguration of concurrent control systems specified by petri nets and implemented in Xilinx FPGA devices. IEEE Access 2018, 6, 32376–32391. [Google Scholar] [CrossRef]
- Wisniewski, R.; Karatkevich, A.; Adamski, M.; Costa, A.; Gomes, L. Prototyping of concurrent control systems with application of Petri Nets and comparability graphs. IEEE Trans. Contr. Syst. Technol. 2018, 26, 575–586. [Google Scholar] [CrossRef]
- Martinez, J.; Silva, M. A simple and fast algorithm to obtain all invariants of a generalized Petri net. In Selected Papers from the European Workshop on App. and Theory of Petri Nets, London, UK; Springer: Berlin, Germany, 1982; pp. 301–310. [Google Scholar]
- Wisniewski, R.; Bazydlo, G.; Gomes, L.; Costa, A. Dynamic partial reconfiguration of concurrent control systems implemented in FPGA devices. IEEE Trans. Ind. Inf. 2017, 13, 1734–1741. [Google Scholar] [CrossRef]
- Murata, T. Petri nets: Properties, analysis and applications. Proc. IEEE 1989, 77, 541–580. [Google Scholar] [CrossRef]
- Chen, T.M.; Sanchez-Aarnoutse, J.C.; Buford, J. Petri net modeling of cyber-physical attacks on smart grid. IEEE Trans. Smart Grid 2011, 2, 741–749. [Google Scholar] [CrossRef]
- Alves, L.F.S.; Lefranc, P.; Jeannin, P.-O.; Sarrazin, B. Review on SiC-MOSFET devices and associated gate drivers. In Proceedings of the 2018 IEEE International Conference on Industrial Technology (ICIT); IEEE: Lyon, France, 2018; pp. 824–829. [Google Scholar]
- Jones, E.A.; Wang, F.F.; Costinett, D. Review of Commercial GaN Power Devices and GaN-Based Converter Design Challenges. IEEE J. Emerg. Sel. Topics Power Electron. 2016, 4, 707–719. [Google Scholar] [CrossRef]
- Khomfoi, S.; Tolbert, L.M. Power Electronics Handbook: Devices, Circuits, and Applications Handbook, 4th ed.; Rashid, M.H., Ed.; Elsevier: Burlington, MA, USA, 2017; ISBN 9780123820365. [Google Scholar]
- Diao, L.; Tang, J.; Loh, P.C.; Yin, S.; Wang, L.; Liu, Z. An Efficient DSP–FPGA-based implementation of hybrid PWM for electric rail traction induction motor control. IEEE Trans. Power Electron. 2018, 33, 3276–3288. [Google Scholar] [CrossRef]
- Hamouda, M.; Blanchette, H.F.; Al-Haddad, K.; Fnaiech, F. An efficient DSP-FPGA-based real-time implementation method of SVM algorithms for an indirect matrix converter. IEEE Trans. Ind. Electron. 2011, 58, 5024–5031. [Google Scholar] [CrossRef]
- Andreu, J.; Kortabarria, I.; Ormaetxea, E.; Ibarra, E.; Martin, J.L.; Apinaniz, S. A step forward towards the development of reliable matrix converters. IEEE Trans. Ind. Electron. 2012, 59, 167–183. [Google Scholar] [CrossRef]
- Kolar, J.W.; Friedli, T.; Rodriguez, J.; Wheeler, P.W. Review of three-phase PWM AC–AC converter topologies. IEEE Trans. Ind. Electron. 2011, 58, 4988–5006. [Google Scholar] [CrossRef]
- Rodriguez, J.; Rivera, M.; Kolar, J.W.; Wheeler, P.W. A review of control and modulation methods for matrix converters. IEEE Trans. Ind. Electron. 2012, 59, 58–70. [Google Scholar] [CrossRef]
- Szczesniak, P. Challenges and design requirements for industrial applications of AC/AC power converters without DC-link. Energies 2019, 12, 1581. [Google Scholar] [CrossRef]
- Friedli, T.; Round, S.D.; Hassler, D.; Kolar, J.W. Design and performance of a 200-kHz All-SiC JFET current DC-link back-to-back converter. IEEE Trans. Ind. Appl. 2009, 45, 1868–1878. [Google Scholar] [CrossRef]
- Safari, S.; Castellazzi, A.; Wheeler, P. Experimental and analytical performance evaluation of SiC power devices in the matrix converter. IEEE Trans. Power Electron. 2014, 29, 2584–2596. [Google Scholar] [CrossRef]
- Wisniewski, R.; Bazydlo, G.; Szczesniak, P. Low-Cost FPGA Hardware Implementation of Matrix Converter Switch Control. Ieee Trans. Circuits Syst. Ii 2019, 66, 1177–1181. [Google Scholar] [CrossRef]
- Leubner, M.; Remus, N.; Schwarz, S.; Hofmann, W. Voltage based 2/3/4-step commutation for direct three-level matrix converter. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; pp. 2507–2514. [Google Scholar]
- Zhi Wu Li; Meng Chu Zhou; Nai Qi Wu A Survey and Comparison of Petri Net-Based Deadlock Prevention Policies for Flexible Manufacturing Systems. IEEE Trans. Syst. ManCybern. C 2008, 38, 173–188.
- Girault, C.; Valk, R. Petri Nets for Systems Engineering: A Guide to Modeling, Verification, and Applications; Springer: New York, NY, USA, 2003; ISBN 9783540412175. [Google Scholar]
- Montano, L.; García, F.J.; Villarroel, J.L. Using the Time Petri Net Formalism for Specification, Validation, and Code Generation in Robot-Control Applications. Int. J. Robot. Res. 2000, 19, 59–76. [Google Scholar] [CrossRef]
- Tzes, A.; Kim, S.; McShane, W.R. Applications of Petri networks to transportation network modeling. IEEE Trans. Veh. Technol. 1996, 45, 391–400. [Google Scholar] [CrossRef]
- Gomes, L.; Costa, A.; Barros, J.P.; Lima, P. From Petri net models to VHDL implementation of digital controllers. In Proceedings of the 33rd Annual Conference of the IEEE IES, Taipei, Taiwan, 5–8 November 2007; pp. 94–99. [Google Scholar] [CrossRef]
- Clarke, E.M.; Grumberg, O.; Peled, D.A. Model Checking; MIT Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Emerson, E. The beginning of model checking: A personal perspective. In 25 Years of Model Checking: History, Achievements, Perspectives; Grumberg, O., Veith, H., Eds.; Springer: Heidelberg, Germany, 2008; pp. 27–45. [Google Scholar]
- Cavada, R.; Cimatti, A.; Dorigatti, M.; Griggio, A.; Mariotti, A.; Micheli, A.; Mover, S.; Roveri, M.; Tonetta, S. The nuXmv symbolic model checker. In Computer Aided Verification. CAV Lecture Notes in Computer Science; Biere, A., Bloem, R., Eds.; Springer: Cham, Switzerland, 2014; pp. 334–342. [Google Scholar]
- Karatkevich, A.G.; Wisniewski, R. A polynomial-time algorithm to obtain state machine cover of live and safe petri nets. IEEE Trans. Syst. Man Cybern. Syst. 2019, (Early Access), 1–6. [Google Scholar] [CrossRef]
- Wisniewski, R.; Wojnakowski, M.; Stefanowicz, Ł. Safety Analysis of Petri Nets Based on the SM-Cover Computed with the Linear Algebra Technique; AIP Publishing: Thessaloniki, Greece, 2018; p. 080008. [Google Scholar]
- Zaitsev, D.A. Sleptsov nets run fast. IEEE Trans. Syst. Man Cybern Syst. 2016, 46, 682–693. [Google Scholar] [CrossRef]
- Jiang, Z.; Li, Z.; Wu, N.; Zhou, M. A petri net approach to fault Diagnosis and restoration for power transmission systems to avoid the output interruption of substations. IEEE Syst. J. 2018, 12, 2566–2576. [Google Scholar] [CrossRef]
- Zhu, Q.; Zhou, M.; Qiao, Y.; Wu, N. Petri net modeling and scheduling of a close-down process for time-constrained single-Arm cluster tools. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 389–400. [Google Scholar] [CrossRef]
- Huang, B.; Pei, Y.; Yang, Y.; Zhou, M.; Li, J. Near-optimal and minimal PN supervisors of FMS with uncontrollability and unobservability. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017; pp. 3715–3720. [Google Scholar] [CrossRef]
- Yu, W.; Yan, C.; Ding, Z.; Jiang, C.; Zhou, M. Analyzing E-commerce business process nets via incidence matrix and reduction. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 130–141. [Google Scholar] [CrossRef]
- Zhu, G.; Li, Z.; Wu, N.; Al-Ahmari, A. Fault identification of discrete event systems modeled by petri nets with unobservable transitions. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 333–345. [Google Scholar] [CrossRef]
- Teng, Y.; Du, Y.; Qi, L.; Luan, W. A logic petri net-based method for repairing process models with concurrent blocks. IEEE Access 2019, 7, 8266–8282. [Google Scholar] [CrossRef]
- Fendri, D.; Chaabene, M. Hybrid petri net scheduling model of household appliances for optimal renewable energy dispatching. Sustain. Cities Soc. 2019, 45, 151–158. [Google Scholar] [CrossRef]
- Naybour, M.; Remenyte-Prescott, R.; Boyd, M.J. Reliability and efficiency evaluation of a community pharmacy dispensing process using a coloured Petri-net approach. Reliab. Eng. Syst. Saf. 2019, 182, 258–268. [Google Scholar] [CrossRef]
- Pereira, F.; Moutinho, F.; Gomes, L. IOPT-tools—Towards cloud design automation of digital controllers with Petri nets. In Proceedings of the 2014 International Conference on Mechatronics and Control (ICMC), Jinzhou, China, 3–5 July 2014; pp. 2414–2419. [Google Scholar] [CrossRef]
- Platform Independent Petri net. Editor 2 (PIPE2). Available online: http://pipe2.sourceforge.net (accessed on 1 July 2019).
- Hippo. Available online: http://hippo.iee.uz.zgora.pl (accessed on 1 July 2019).
- Wisniewski, R. Prototyping of Concurrent Control Systems Implemented in FPGA Devices; Springer: Berlin/Heidelberg, Germany, 2016; ISBN 9783319458106. [Google Scholar]
- Wisniewski, R.; Bukowiec, A.; Wegrzyn, M. Benefits of hardware accelerated simulation. In Proceedings of the International Workshop on Discrete-Event System Design (DESDES ‘1), Przytok (Zielona Gora), Poland, 27–29 June 2001; pp. 229–234. [Google Scholar]
- Szcześniak, P. Three-Phase AC-AC Power Converters Based on Matrix Converter Topology: Matrix-Reactance Frequency Converters Concept; Power Systems; Springer: London, UK, 2013; ISBN 9781447148951. [Google Scholar]
- Xilinx. CORDIC. Available online: https://www.xilinx.com/products/intellectual-property/cordic.html (accessed on 27 May 2019).









| No | Sak | Sbk | Sck | uab | ubc | uca | iA | iB | iC | Index of dk | Sector of the Input Current Vector Si | Voltage Sector SO | |||||
| 0A | SaA | SbA | ScA | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | ||
| 0B | SaB | SbB | ScB | 0 | 0 | 0 | 0 | 0 | 0 | I | +9 | −8 | +7 | −9 | +8 | −7 | 1 |
| 0C | SaC | SbC | ScC | 0 | 0 | 0 | 0 | 0 | 0 | II | −7 | +9 | −8 | +7 | −9 | +8 | |
| +1 | SaA | SbB | ScB | uAB | 0 | −uAB | ia | −ia | 0 | III | −3 | +2 | −1 | +3 | −2 | +1 | |
| −1 | SaB | SbA | ScA | −uAB | 0 | uAB | −ia | ia | 0 | IV | +1 | −3 | +2 | −1 | +3 | −2 | |
| +2 | SaB | SbC | ScC | uBC | 0 | −uBC | 0 | ia | −ia | I | −6 | +5 | −4 | +6 | −5 | +4 | 2 |
| −2 | SaC | SbB | ScB | −uBC | 0 | uBC | 0 | −ia | ia | II | +4 | −6 | +5 | −4 | +6 | −5 | |
| +3 | SaC | SbA | ScA | uCA | 0 | −uCA | −ia | 0 | ia | III | +9 | −8 | +7 | −9 | +8 | −7 | |
| −3 | SaA | SbC | ScC | −uCA | 0 | uCA | ia | 0 | −ia | IV | −7 | +9 | −8 | +7 | −9 | +8 | |
| +4 | SaB | SbA | ScB | −uAB | uAB | 0 | ib | −ib | 0 | I | +3 | −2 | +1 | −3 | +2 | −1 | 3 |
| −4 | SaA | SbB | ScA | uAB | −uAB | 0 | −ib | ib | 0 | II | −1 | +3 | −2 | +1 | −3 | +2 | |
| +5 | SaC | SbB | ScC | −uBC | uBC | 0 | 0 | ib | −ib | III | −6 | +5 | −4 | +6 | −5 | +4 | |
| −5 | SaB | SbC | ScB | uBC | −uBC | 0 | 0 | −ib | ib | IV | +4 | −6 | +5 | −4 | +6 | −5 | |
| +6 | SaA | SbC | ScA | −uCA | uCA | 0 | −ib | 0 | ib | I | −9 | +8 | −7 | +9 | −8 | +7 | 4 |
| −6 | SaC | SbA | ScC | uCA | −uCA | 0 | ib | 0 | −ib | II | +7 | −9 | +8 | −7 | +9 | −8 | |
| +7 | SaB | SbB | ScA | 0 | −uAB | uAB | ic | 0 | −ic | III | +3 | −2 | +1 | −3 | +2 | −1 | |
| −7 | SaA | SbA | ScB | 0 | uAB | −uAB | 0 | ic | −ic | IV | −1 | +3 | −2 | +1 | −3 | +2 | |
| +8 | SaC | SbC | ScB | 0 | −uBC | uBC | −ic | ic | 0 | I | +6 | −5 | +4 | −6 | +5 | −4 | 5 |
| −8 | SaB | SbB | ScC | 0 | uBC | −uBC | −ic | 0 | ic | II | −4 | +6 | −5 | +4 | −6 | +5 | |
| +9 | SaA | SbA | ScC | 0 | −uCA | uCA | 0 | −ic | ic | III | −9 | +8 | −7 | +9 | −8 | +7 | |
| −9 | SaC | SbC | ScA | 0 | uCA | −uCA | ic | −ic | 0 | IV | +7 | −9 | +8 | −7 | +9 | −8 | |
| I | −3 | +2 | −1 | +3 | −2 | +1 | 6 | ||||||||||
| II | +1 | −3 | +2 | −1 | +3 | −2 | |||||||||||
| III | +6 | −5 | +4 | −6 | +5 | −4 | |||||||||||
| IV | −4 | +6 | −5 | +4 | −6 | +5 | |||||||||||
| Property of the Net | Result of the Analysis |
|---|---|
| Number of places | 49 |
| Number of transitions | 31 |
| Classification | MG-net (Marked Graph) |
| Safeness | TRUE |
| Liveness | TRUE |
| Number of reachable markings (states) | 239 |
| Number of all place invariants in the net | 240 |
| Number of all SMCs in the net | 10 |
| SM-coverability of the Petri net | TRUE |
| Minimal number of SMCs to cover the Petri net | 10 |
| Resource | Consumption | Available | Utilisation (%) |
|---|---|---|---|
| Built-in Digital Signal Processing blocks | 16 | 90 | 17.78 |
| Block Random Access Memory | 18 | 50 | 36.00 |
| Flip-Flop registers | 4304 | 41,600 | 10.35 |
| Look-Up Tables | 4837 | 20,800 | 23.25 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wisniewski, R.; Bazydło, G.; Szcześniak, P.; Grobelna, I.; Wojnakowski, M. Design and Verification of Cyber-Physical Systems Specified by Petri Nets—A Case Study of a Direct Matrix Converter. Mathematics 2019, 7, 812. https://doi.org/10.3390/math7090812
Wisniewski R, Bazydło G, Szcześniak P, Grobelna I, Wojnakowski M. Design and Verification of Cyber-Physical Systems Specified by Petri Nets—A Case Study of a Direct Matrix Converter. Mathematics. 2019; 7(9):812. https://doi.org/10.3390/math7090812
Chicago/Turabian StyleWisniewski, Remigiusz, Grzegorz Bazydło, Paweł Szcześniak, Iwona Grobelna, and Marcin Wojnakowski. 2019. "Design and Verification of Cyber-Physical Systems Specified by Petri Nets—A Case Study of a Direct Matrix Converter" Mathematics 7, no. 9: 812. https://doi.org/10.3390/math7090812
APA StyleWisniewski, R., Bazydło, G., Szcześniak, P., Grobelna, I., & Wojnakowski, M. (2019). Design and Verification of Cyber-Physical Systems Specified by Petri Nets—A Case Study of a Direct Matrix Converter. Mathematics, 7(9), 812. https://doi.org/10.3390/math7090812