1. Introduction
First of all, we recall that in a category an object
X has the fixed point property (
FPP, for short) if every self-morphism
f of
X has a point
such that
. Since every singleton obviously has the
FPP, when studying the
FPP of topological spaces, each topological space
X (resp. digital image
) is assumed to be connected (
resp.k-connected) and
. Thus, each set
X involving the
FPP considered in this paper is assumed to follow this requirement. As stated in [
1], associated with the Borsuk and the Lefschetz fixed point theorems [
2,
3,
4], there was the following conjecture [
3]: Let
X be a contractible and locally contractible space.
Indeed, as mentioned in [
1], Borsuk proved in [
2] that this conjecture is true in finite dimensional metric spaces. As referred in (1), the contractibility of a metric space
X plays an important role in studying the
FPP of a metric space
X. Thus, many works [
2,
5,
6,
7,
8,
9,
10] associated with contractibility are well developed. Meanwhile, it is obvious that a
K-topological space is not metrizable [
1] because it is not even a regular space. Hence it cannot be metrizable, according to Nagata-Smirnov theorem [
11]. Hereafter, since we often use the term “Khalimsky”, we will use instead of it ‘
-’ for short if there is no danger of confusion. Indeed, a paper [
1] studied the conjecture (1) from the viewpoint of the category of
K-topological spaces by using a certain new approach. At the moment, a paper [
1] developed a new homotopy for
K-topological spaces, the so-called
K-homotopy, which can be used in fixed point theory for
K-topological spaces.
Then, a paper [
1] proposed a
K-topological version of the conjecture (1) and some related works. At this moment, we need to remind that there are some differences between metric-based fixed point theory and
K-topological-based fixed point theory. Furthermore, unlike the difference between
contractibility and
local contractibility in metric-based topological spaces, a paper [
1] proved that their
K-topological versions have their own features. Namely, based on a
K-homotopy for
K-topological spaces, it turns out that in
K-topology whereas every
K-topological space is locally contractible, it need not be
K-contractible. To be specific, it turns out that [
1] in
K-topology, the
K-contractibility implies the local
K-contractibility, the converse does not hold. Let us now recall the
K-topological version of (1) stated in [
1], as follows: Let
X be a
K-topological space with
K-contractibility.
Then, the paper [
1] asserted that a simple closed
K-curve with four elements in the
K-plane,
, is
K-contractible relative to a certain singleton
. Indeed, after intensively studying the
K-contractibility of a
K-topological space, in this paper we now prove that
is not
K-contractible and further, it is not
K-contractible relative to a certain singleton
(Theorem 3 and Remark 4). This means that we now correct the assertion. Namely,
cannot be a space against the conjecture (2) (see Theorem 3 and Remark 6). In this paper we will often use the notation: For
,
with
K-topology or only a set depending on the situation [
12].
The rest of the paper is organized as follows:
Section 2 provides basic terminology which can be used in this paper.
Section 3 explores some properties involving
K-homotopies and
K-homeomorphisms.
Section 4 firstly proves that
is not
K-contractible. Besides, we study some properties of “
contractibility relative to a certain subset” compared with the typical contractibility in
K-homotopy theory. Finally, we conclude that the conjecture (2) still remains open.
Section 5 investigates some properties of the so-called
A-homotopy and
A-contractibility. Besides, in the category
KAC, after proposing a new version inherited from the conjecture (2) which is suitable for studying the
FPP or the
AFPP for spaces in
KAC, we prove that this new conjecture is negative with respect to the
FPP or the almost fixed point property (
AFPP, for brevity) [
13].
Section 6 concludes the paper with summary and a further work.
3. K-Homotopies and K-Homeomorphisms
In this section we examine if a
K-homeomorphism preserves a
K-homotopy between two
K-continuous maps. Let us now recall the notion of
K-continuity of a map from
, where
and
, as follows:
because each point
x in a
K-topological space
X always has
, where
(
resp. ) is the smallest open set of
x (
resp. ) in
X(
resp.Y).
Using spaces
and
K-continuous maps, we have a topological category, denoted by
KTC, consisting of the following two data [
16]:
- (1)
For any set , the set of spaces as objects of KTC denoted by ;
- (2)
for all pairs of elements in , the set of all K-continuous maps between them as morphisms.
To study K-topological spaces, we need to recall a K-homeomorphism as follows:
Definition 2. [15,16] For two spaces and , a map is called a K-homeomorphism if h is a K-continuous bijection, and is K-continuous. Owing to (4), the Alexandroff topological structure of a K-topological space and the bijection of a K-homeomorphism, we obtain the following:
Proposition 1. A K-homeomorphism implies that for any point , In view of (5), we can represent a K-homeomorphism as follows: A map is a K-homeomorphism if and only if h is a bijection satisfying the property for any point .
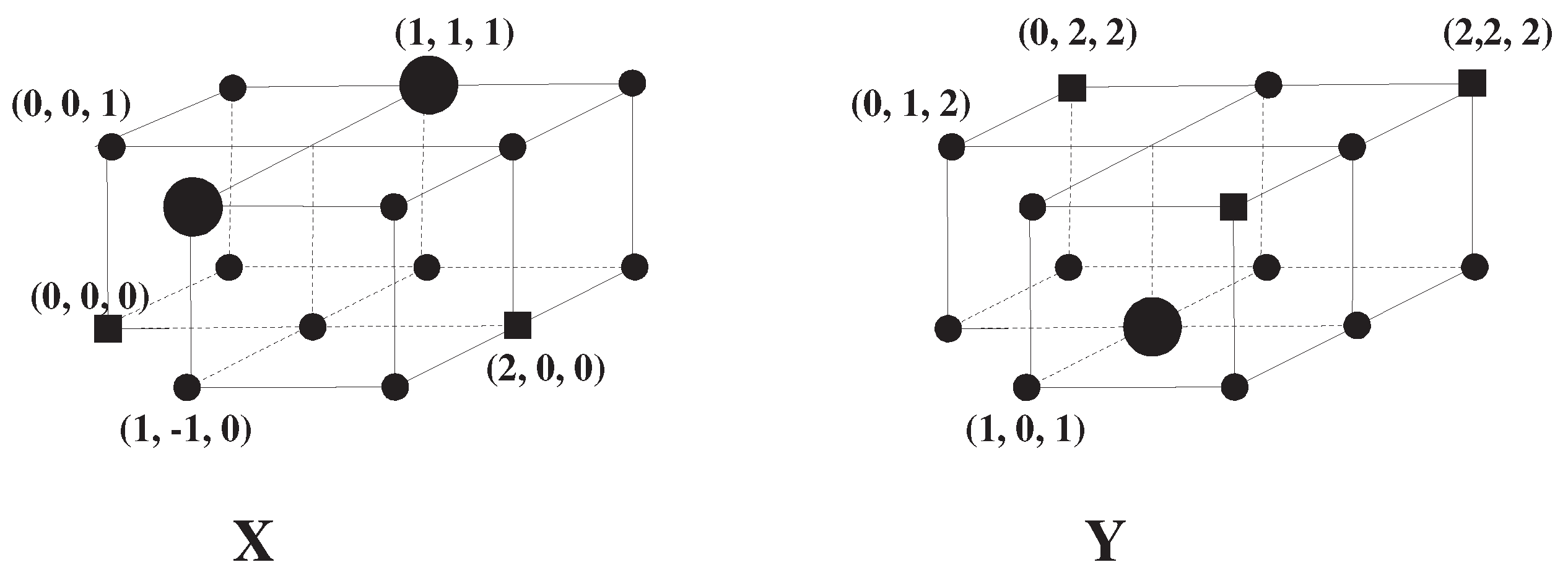
Example 1. Consider the two K-topological spaces and in Figure 1. Although they have the same shape with the same cardinality, they are not K-homeomorphic. To be precise, for the points , we obtain where mean the cardinality of the given set. However, the space does not contain any points whose cardinalities are 9 or 11. Thus, we complete the proof contrary to (5).
Let us recall the notion of K-homotopy for K-topological spaces. Consider and , where .
Definition 3. [1] In KTC, for two spaces and , let be K-continuous functions. Suppose there exist a K-interval , and a function such that for all , and ;
for all , the induced function defined by for all is K-continuous;
for all , the induced function defined by for all is K-continuous.
Then we say that F is a K-homotopy between f and g, and f and g are K-homotopic in Y. In addition, we use the notation .
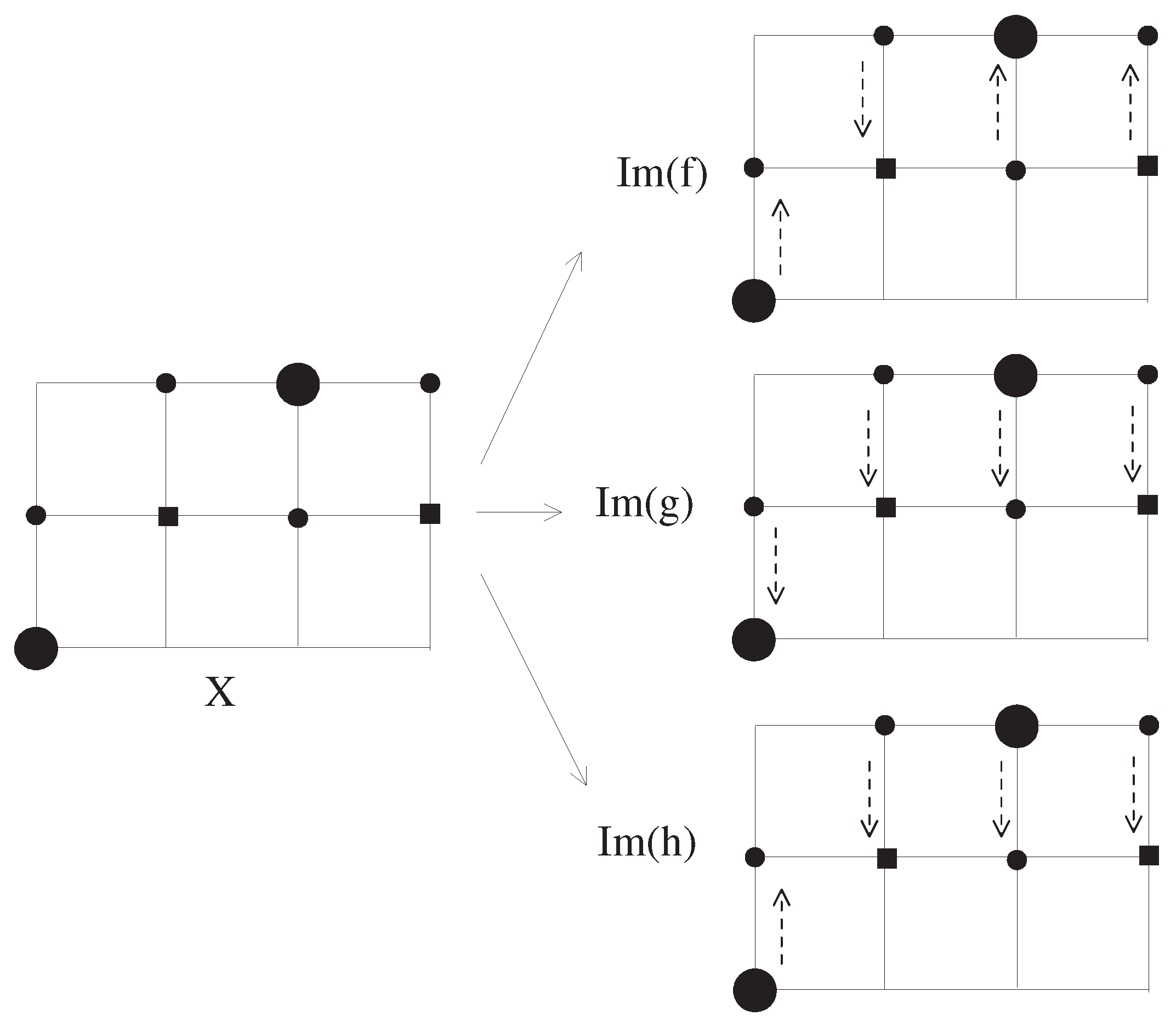
Example 2. Consider certain three K-continuous self-maps f, g, and h of X shown in Figure 2 with their , , and in Figure 2. Then we observe , , and (the improvement of Figure 3c of [1]). Remark 1. In view of the properties and of Definition 3, for the homotopy , the set need not be a subspace of the product space . Namely, we may consider it as just a Cartesian product of two K-topological spaces X and .
Let us now examine if a K-homeomorphism preserves a K-homotopy between two K-continuous maps.
Theorem 1. A K-homeomorphism preserves a K-homotopy.
Proof. Suppose a
K-homotopy between two
K-continuous maps
f and
g. Namely, given two spaces
,
, and the two
K-continuous functions
, we consider a
K-homotopy
supporting
. Besides, further assume two
K-homeomorphisms
and
, where
and
. Indeed, the dimensions
and
of
and
need not be equal to those of
X and
Y, respectively. Then, it is obvious that the two composites
are also
K-continuous maps from
to
. To be specific, based on the given
K-homotopy and the two
K-homeomorphisms
and
, let us now define the new map
Then, we obtain the following:
for all , and ;
for all , the induced function defined by for all is K-continuous;
for all , the induced function defined by for all is K-continuous.
Thus, we conclude that H is a K-homotopy between and , i.e., . □
Indeed, Theorem 1 will be strongly used in
Section 4.
4. The Non-K-contractibility of and the Non-FPP of
In this section, given a
K-topological space
X, after developing the notion of
K-contractibility relative to each singleton , we compare it with the concept of
K-contractibility of
X. Finally, we prove that the
K-contractibility does not imply the
K-contractibility relative to each singleton
. Besides, every
, is proved not to be
K-contractible. Indeed, this feature is quite different from that of the
-contractibility of a simple closed
-curve with four elements in
(see [
21] for more details). Based on this fact, we correct the assertion relating to the
K-contractibility of
in [
1]. Then, we deal with the issue proposed in (2). To do this work, we need to recall the notion of a
K-homotopy involving with both contractibility and local contractibility for
K-topological spaces.
Definition 4. [1] In KTC, we say that a K-topological space X is K-contractible if the identity map is K-homotopic in X to a constant map with a singleton consisting of a certain point . We use the notation . Motivated by many kinds of homotopy equivalences for digital images [
16,
18,
22,
23], the
K-topological version of them were established in [
1]. To classify
K-topological spaces in terms of a certain homotopy equivalence in
KTC, we use the following:
Definition 5. [1] In KTC, for two spaces and , if there are K-continuous maps and such that is K-homotopic to and is K-homotopic to , then the map is called a K-homotopy equivalence. We use the notation . Owing to Theorem 1, we obtain the following:
Remark 2. A K-homeomorphism preserves a K-homotopy equivalence and the K-contractibility.
Definition 6. Consider a subspace and . Then we call a K-topological pair. Then, with the K-homotopy in Definition 3, we further consider the following:
For all , assume that for all .
Then we call F an K-homotopy relative to B between f and g, and we say that f and g are K-homotopic relative to B in Y, in symbol.
Definition 7. We say that is K-contractible relative to a certain singleton if relative to a certain singleton . Then we use the notation .
Using a method similar to the proof of Theorem 1, we obtain the following:
Remark 3. A K-homeomorphism preserves the K-contractibility of X relative to a certain singleton .
Let us compare the K-contractibility of a K-topological space X with the K-contractibility relative to each singleton . Namely, although the K-contractibility relative to each singleton implies the K-contractibility of X, the converse does not hold, as follows:
Theorem 2. The K-contractibility of X does not imply the K-contractibility relative to each singleton .
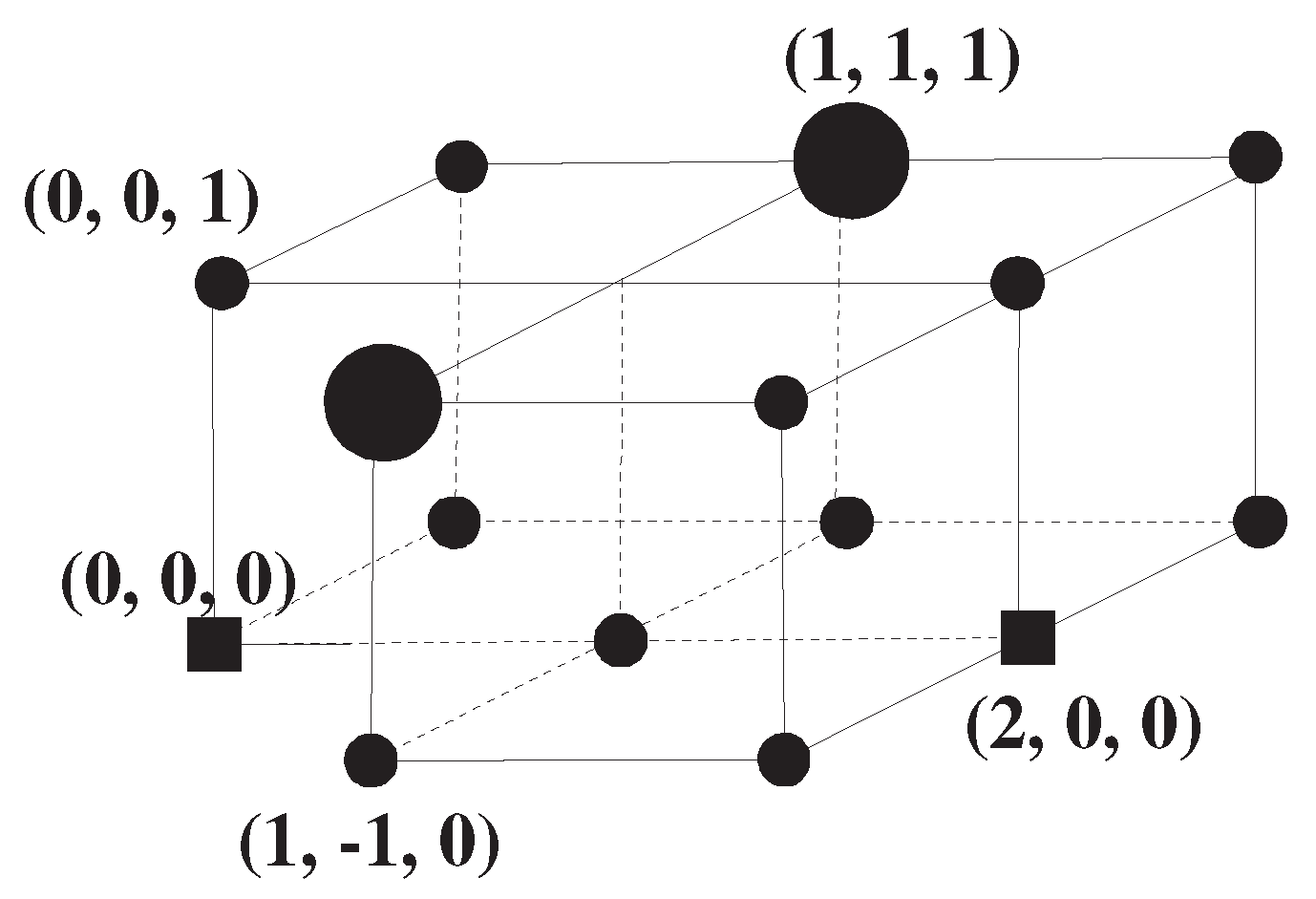
Proof. To prove the assertion, we consider the space
in
Figure 3.
(Step 1) It is obvious that the given space
X is
K-contractible relative to the singleton
, i.e.,
, where
(Step 2) We prove that the given space
X is not
K-contractible relative to the singleton
, where
Namely, we may consider the point
q to be a point in the second level of the set
X of
Figure 3.
Without loss of generality, we may take any point
q in (6) and prove that
X is not
K-contractible relative to the singleton
. For convenience, let us consider
. Then we prove
X is not
K-contractible relative to the singleton
. Using the ‘reductio ad absurdum’, suppose that there is a
K-homotopy,
, satisfying
. Let us now consider the point
. Then we obtain
According to the
K-homotopy satisfying
, based on (6), we may assume the mappings of the point
x by
F in the following way:
or
In case we follow the mapping (7), we observe that the mapping does not support the property of Definition 3. In case we take the mapping (8), we find that the mapping does not support the property of Definition 3 either. The other cases are similarly proved by using the above method. Thus, we conclude that for the point q of (6), there is no K-homotopy supporting . □
Based on the properties of contractibility, regarding the conjecture (1), we need to deal with the notion of local
K-contractibility. As referred in (1), the notions of
contractibility and
locally contractibility play important role in many areas of mathematics [
2,
5,
6,
24]. In typical homotopy theory, we say that a
contractible space is precisely one with the same homotopy type of a singleton [
24]. In typical mathematics, it is well known that contractible spaces are not necessarily locally contractible nor vice versa [
11] (see [
1] for more details). To deal with the conjecture (2), we need to recall the
K-topological version of the local contractibility, as follows:
Definition 8. [1] In KTC, a K-topological space is said to be locally K-contractible if it has a basis of open subsets each of which is a K-contractible space under the subspace K-topology. Proposition 2. [1] Every space in KTC is locally contractible. A paper [
1] proved the following:
Lemma 1. [1] Any K-path in is K-contractible. Proposition 3. [1] In KTC, the FPP is a K-topological invariant. For
, we prove the following which can be essentially used in
Section 4.
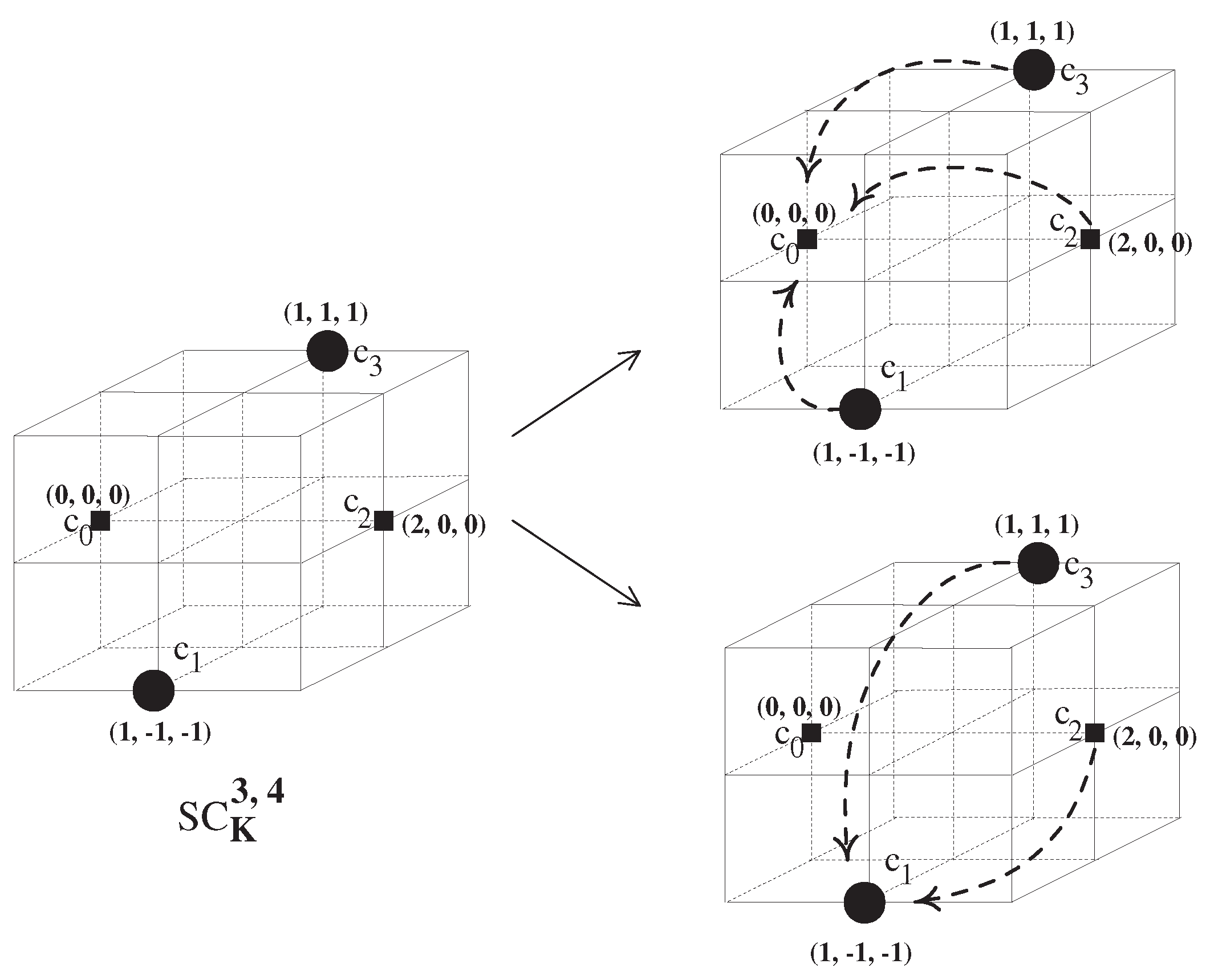
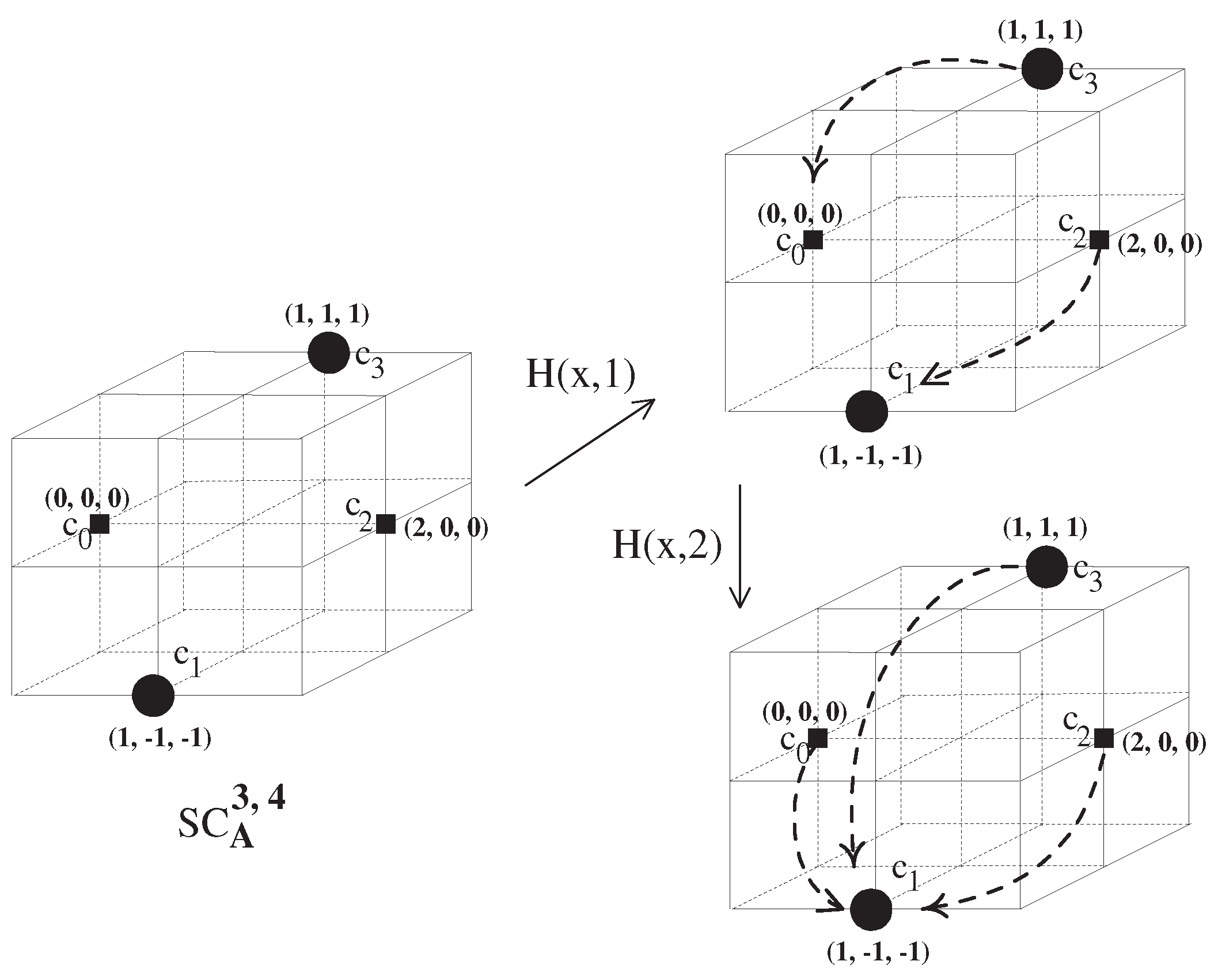
Theorem 3. is not K-contractible, .
Proof. Suppose
is
K-contractible. By Remark 2, since a
K-homeomorphism preserves the
K-contractibility and
is
K-homeomorphic to
in
Figure 4, we may suppose the
K-contractibility of
. Then we must prove that there is a
K-homotopy making
K-contractible, i.e.,
for a certain point
. For convenience, put
(see
Figure 4). Take any singleton as a subset of
for the examination of the
K-contractibility of
. Without loss of generality, we may take a singleton
or
because the former is pure closed point and the latter is pure open point. Then we prove that
cannot be
K-homotopic to the constant maps
and
. First suppose
is
K-homotopic to
. Then, for some
, consider a certain
K-homotopy
satisfying
. Then the point
must be mapped by the homotopy
F onto the point
,
or
.
(Case 1): In case is assumed to be mapped onto the point , the mapping does not satisfy the property of Definition 2 because of the non-K-continuity of the mapping from the point to , contrary to the given property of the K-homotopy (9).
(Case 2): As another case, let us now assume that the point
is mapped by the homotopy
F onto the point
. Since
owing to the property of the
K-homotopy,
F must map
onto
(see the property
of Definition 2). Then the homotopy
F does not satisfy the property
of Definition 2 because of the non-
K-continuity of the mapping from the point
to
, contrary to the given
K-homotopy (9). Finally, let us now assume that the point
is mapped by the homotopy
F onto the point
. Then, using a method similar to the just above case, this case is also proved to be negative. Thus, we conclude that there is no
K-homotopy supporting
.
Next, using a method similar to the proof of the above assertion that is not K-homotopic to the constant map , we prove that there is no K-homotopy supporting or . In view of the above all cases, we have a contradiction to the hypothesis of the K-contractibility of . Finally, we complete that is not K-contractible. □
In view of the proof of Theorem 3, we observe the following:
Remark 4. is not K-contractible relative to a certain singleton , .
By Theorem 3 and Remark 4, we obtain the following (correction of the assertion of the
K-contractibility of
of Lemma 4.3 of [
1]).
Remark 5. Every is neither K-contractible nor K-contractible relative to a certain singleton , .
This feature is quite different from the
k-contractibility of simple closed
k-curve with four elements in
, in typical digital topology using digital
k-graphs in
(see [
21,
23,
25]).
Let us now move onto the conjecture posed in (2). We say that a K-topological space has the FPP if every K-continuous self-map f of X has a point such that .
Let us now study some properties of K-topological spaces from the viewpoint of fixed point theory.
In KTC, we say that a K-topological invariant is a property of a K-topological space which is invariant under K-homeomorphisms.
Theorem 4. [1,26] Let X be a simple K-path in the n-dimensional K-topological space. Then it has the FPP. Theorem 5. [26,27] Let be a convex and compact K-plane as a subspace of , where . Then it has the FPP. Corollary 1. does not have the FPP, .
For
, consider the self-map
f of
given by
. Then it is clear that
f is a
K-continuous map without any fixed point [
1].
Regarding the conjecture (2), owing to Lemma 1, Theorems 3–5, Remark 5 and Corollary 1, we have observed that the conjecture (2) seems to be positive. However, we now obtain the following:
Remark 6. In KTC, the conjecture (2) still remains open.
Let us now consider another category, the so-called
KDTC, which means the
-topological category in [
17,
28]. To do this work, let us just recall two concepts for objects and morphisms for this category. For any set
, let
be a space
with digital
k-connectivity [
17]. For two spaces
and
, a map
is called
-
-continuous at a point
[
17] if
f is
K-continuous at the point
x and further, digitally
-continuous at a point
x. In case
f is
-
-continuous at every point
, we say that
f is a
-
-continuous map. In other words, a map with the
-
-continuity is equivalent to the map satifying both
K-continuity and the typical digital
-continuity in [
21]. The category
KDTC consists of the following two data.
- (1)
The set of spaces with digital k-connectivity as objects of KDTC denoted by ;
- (2)
for all pairs of elements in , the set of all -continuous maps between them as morphisms.
A paper [
28] established the notion of
-
-homotopy in the category
KDTC (see Definition 6 of [
28]) by replacing
(
resp. ) with
(
resp. ). Based on this replacement, it also formulated the notion of
-
k-contractibility considered as the
KDTC-version of Definitions 3 and 6 using
–
in the present paper. Namely, for
,
X is called
-kcontractible relative to a certain singleton
(or
-kcontractible for short) if
is
-
k-homotopic to a constant map
relative to a certain singleton
. Then we use the notation
. Then, the paper asserted that the spaces
are
-8contractible (see Example 4.1 of [
28]). However, we need to correct it as follows:
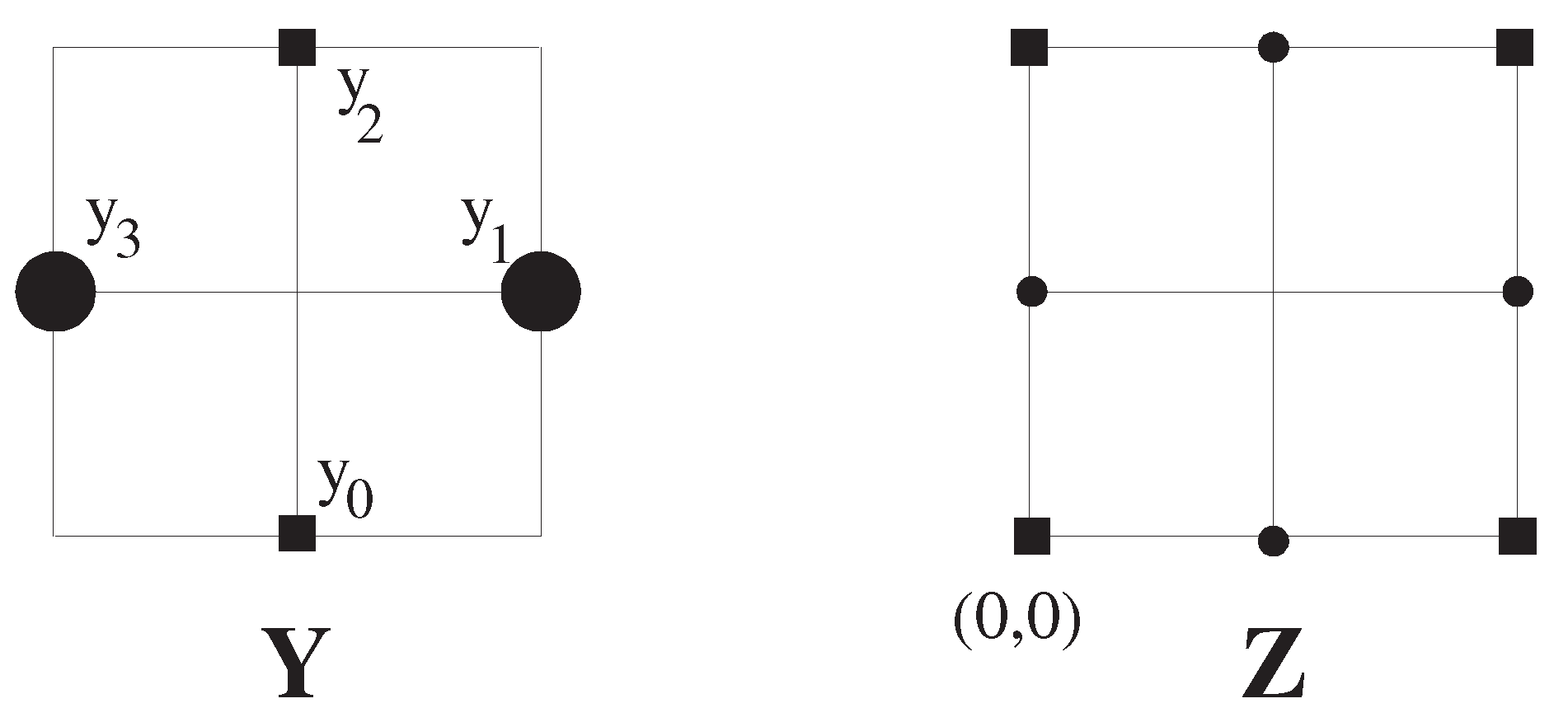
Example 3. (correction of Example 4.1 of [28]) Each of in Figure 5 is not -8-contractible. To be specific, by Theorem 3 and Remark 4, we observe the non--8-contractibility of Y. Similarly, we see the non--8-contractibility of Z. 5. Homotopies in the Category KAC and a Certain Conjecture Involving the FPP in KAC
Unlike the conjecture (2) studied in
Section 4, let us now consider the conjecture in the more generalized category, the so-called category
KAC which is a topological graph version of
KTC. Namely, after establishing
KAC-versions of the
K-contractibility and the local
K-contractibility, we may pose a more generalized version of (2) (see (11) and (13)). This approach can facilitate the study of the
FPP and the almost fixed point property (
AFPP, for short) of some digital spaces. Indeed, the
K-homotopy in
KTC in
Section 4 is focused on studying the
for
K-topological spaces. Let us now generalize the conjecture (2) with respect to the
FPP and the almost fixed point property (
AFPP, for brevity) in
KAC (see (11) and (13) for more details). To do this work, objects and morphisms in
KAC are certainly assumed, as follows: Considering
K-topological spaces
with
K-adjacency (see Definition 9(1)), we call them
-spaces which are objects of
KAC (see Definition 9). Indeed, a
-space is a
K-topological graph with a
K-adjacency inherited from a
K-topological space
(see Definition 9). Besides, regarding morphisms in
KAC, we will use the so-called
A-maps (see Definition 10).
Definition 9. [29] (1) A -space is a set X with K-adjacency derived from a K-topological space . Namely, a -space X is a K-topological graph inherited from the K-topological space with the adjacency between two distinct points introduced in Definition 1(1). (2) For a -space and a point , we define a K-adjacency neighborhood of p to be the set which is called an A-neighborhood of p, where .
As mentioned above, since a -space X is totally derived from the K-topological space , we often denote a -space X with or X in short. Hereafter, for convenience, in a -space , we will use instead of if there is no danger of ambiguity. In view of (3) and the notion of , we obtain the following:
Lemma 2. Given a -space and a point , Proof. For a
-space
, for a point
, since
the proof is completed. □
For a -space X and a point , since for we always have , we can develop an A-map and an A-isomorphism (see Definitions 10 and 11).
Definition 10. [29] Given two -spaces and , we say that a function is an A-map at if Furthermore, we say that a map is an A-map if the map f is an A-map at every point .
In view of Definition 10, we observe that an
A-map
implies a map preserving connected subsets of
X into connected ones [
29]. For instance, let us consider the self-map
f of an
, such that
,
. Whereas
f is an
A-map, it is not a
K-continuous map [
29].
Using both
-spaces and
A-maps, we establish the so-called
-category [
29], denoted by
, consisting of the following data.
- (1)
The set of -spaces as objects, denoted by ,
- (2)
for every ordered pair of objects and , the set of all A-maps as morphisms.
As observed in the above self-map f of an , comparing a K-continuous map and an A-map, owing to (10), we obtain the following:
Theorem 6. (Theorem 4.5 of [29]) Given a map from to , a K-continuous map implies an A-map. But the converse does not hold. Proof. Owing to (10) and Definition 10, we complete the proof. □
Based on the notion of an A-map, we obtain the following:
Definition 11. [29] For two -spaces and , a map is called an A-isomorphism if h is a bijective A-map (for brevity, A-bijection) and if is an A-map. Hereafter, we denote an A-isomorphism between -spaces X and Y with .
In view of Definition 11, we obtain the following:
Remark 7. An A-isomorphism implies that for any point , In view of Remark 7, we can represent an A-isomorphism as follows: A map is an A-isomorphism if and only if h is a bijection satisfying the property for any point .
Definition 12. [29] A simple closed -curve with l elements in , denoted by , is an (injective) sequence such that and are K-adjacent if and only if . Let us now study an
A-homotopy in
[
30]. For a space
, let
B be a subset of
X. Then
is called a
-space pair. Motivated by many kinds of homotopy equivalences [
16,
18,
22,
23,
28,
31], let us consider the notions of an
A-homotopy relative to a subset
[
30],
A-contractibility [
30] and an
A-homotopy equivalence [
30,
32,
33].
Definition 13. [30,33] Let and Y be a space pair and a space in , respectively. Let be A-maps. Suppose there exist and a function such that for all and ;
for all , the induced function given by
for all is an A-map;
for all , the induced function given by for all is an A-map.
Then we say that F is an A-homotopy between f and g.
Furthermore, for all , assume that for all .
Then we call F an A-homotopy relative to B between f and g, and we say that f and g are A-homotopic relative to B in Y, in symbol.
In Definition 13, if
B is a certain singleton of
X, then we say that
F is a pointed
A-homotopy at
. If, for some
,
is
A-homotopic to the constant map
relative to
, then we say that
is
pointed A-contractible (
A-contractible if there is no danger of ambiguity) [
28]. Let us now recall an
A-homotopy equivalence and
A-contractibility in
.
Definition 14. [28] In , for two spaces X and Y, if there are A-maps and such that is A-homotopic to and is A-homotopic to , then the map is called an A-homotopy equivalence. We use the notation . Definition 15. A -space X is said to be locally A-contractible if for every and every of X is A-contractible.
Owing to Lemma 1 and Theorem 6, it is obvious that a -space X is locally A-contractible.
Lemma 3. Every -space is locally A-contractible.
Proof. For a -space X, for each point , is A-contractible in terms of just an A-homotopy with one step. □
Let us propose a certain conjecture in
KAC which is the
KAC-version of (2) in the
KTC. Namely, let
X be a
-space with
A-contractibility.
Owing to Lemma 1 and Theorem 6, we obtain the following:
Proposition 4. (1) An A-homotopy in is a generalization of a K-homotopy in .
(2) A-contractibility is a generalization of the K-contractibility relative to a certain singleton (see Definition 7).
Proof. Since an A-homotopy is define by using the properties – of Definition 13, after replacing K-continuous maps in Definition 3 with A-maps, owing to Theorem 6, we prove the assertion. □
Owing to Lemma 2, Theorem 6, and Remarks 2 and 3, we obtain the following:
Proposition 5. (1) An A-isomorphism preserves an A-homotopy between two A-maps.
(2) An A-isomorphism preserves an A-homotopy equivalence.
(3) An A-isomorphism preserves an A-contractibility of a -space.
Proof. (1) Using a method similar to the proof of Theorem 6, we can complete the proof. To be specific, after replacing K-continuous maps (resp. K-homeomorphism and K-homotopy) used in Theorem 6 with A-maps (resp. A-isomorphism and A-homotopy), we only follow the proof of Theorem 6, the proof is completed.
(2) Based on the fact (1), the proof is completed.
(3) Owing to the property (1), the proof is also completed. □
In KAC, we say that a -space has the FPP if every self-A-map f of X has a point such that .
Lemma 4. In KAC, the FPP is invariant up to A-isomorphism.
Proof. Consider a
-space
with the
FPP. With an
A-isomorphism
, where
, we prove that
Y has the
FPP. Let
f be any self-
A-map of
Y. Then consider the composite
, where
g is a self-
A-map of
X. Owing to the hypothesis, assume
is a fixed point for a self-
A-map
g of
X. Due to the
A-isomorphism
i, there is a point
such that
. Let us consider the mapping
Thus, from (12) we obtain
and further, owing to the hypothesis of the
FPP of
X and the
A-isomorphism
i, we obtain
which implies that the point
is a fixed point of the map
f, which implies that
Y has the
FPP. □
Using Lemma 4 and the local A-contractibility of a -space, we obtain the following:
Theorem 7. The conjecture (11) is negative in KAC.
Proof. We prove that is A-contractible. To be specific, owing to Lemma 4, we suffice to prove that is both locally A-contractible and A-contractible. It is obvious that is locally A-contractible because for any point , is obviously A-contractible, e.g., . Let us now prove the A-contractibility of , as follows:
Consider the map (see
Figure 6)
defined by
Then the map
H is an
A-homotopy on
making
Finally, using Proposition 5, we observe that is A-contractible.
Next, consider a self-map f of defined by . Then the map is obviously an A-map which does not support the FPP of . □
Remark 8. In Theorem 7, although we proved , using a same method as the proof of Theorem 7, we can obtain that for any point , .
In
KAC, we say that a
-space
has the almost (or approximate) fixed point property (
AFPP, for short) if every self-
A-map
f of
X has a point
such that
or
is
K-adjacent to
x. Regarding the conjecture (11) related to
FPP, we now propose the following: Let
X be a
-space with
A-contractibility.
In view of Theorem 7, we obtain the following:
Corollary 2. The conjecture (13) is negative.
Proof. Although is A-contractible, , for the self-A-map f of defined by , we find that this map f does not support the AFPP of . □

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





