Three-Dimensional Volume Integral Equation Method for Solving Isotropic/Anisotropic Inhomogeneity Problems

Abstract
:1. Introduction
2. Volume Integral Equation Method (VIEM)
3. Numerical Analysis Based On the Three-Dimensional Volume Integral Equation Method
3.1. A Single Cubic Inhomogeneity Problem
3.1.1. Volume Integral Equation for an Unbounded Isotropic Matrix Containing a Single Isotropic Cubic Inhomogeneity
3.1.2. Volume Integral Equation for an Unbounded Isotropic Matrix Containing a Single Orthotropic Cubic Inhomogeneity
3.1.3. Numerical Formulation
3.1.4. Numerical Results
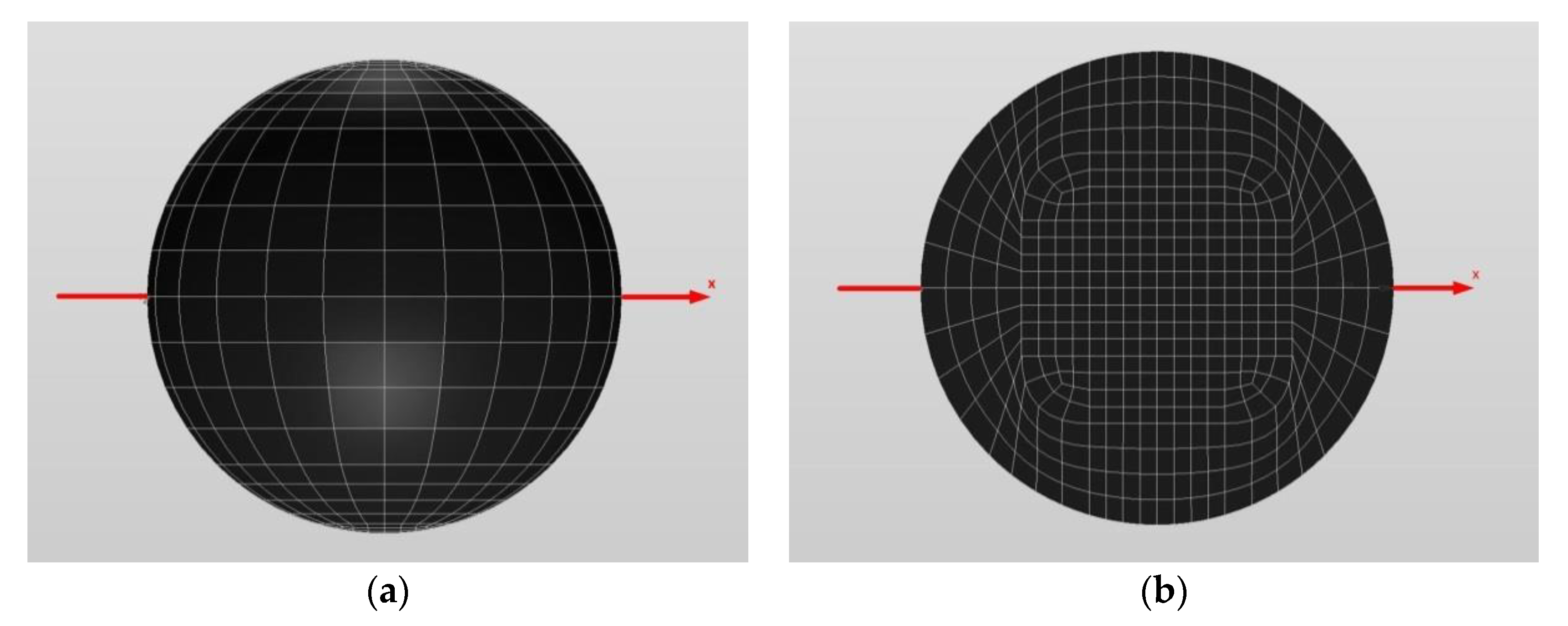
3.2. A single Spherical Inhomogeneity Problem
3.2.1. A Single Isotropic Spherical Inhomogeneity
3.2.2. A Single Orthotropic Spherical Inhomogeneity
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bose, S.K.; Mal, A.K. Elastic waves in a fiber-reinforced composite. J. Mech. Phys. Solids 1974, 22, 217–229. [Google Scholar] [CrossRef]
- Maslov, B.P. Stress concentration in an isotropic matrix bonded by anisotropic fibers. Sov. Appl. Mech. 1987, 23, 963–969. [Google Scholar] [CrossRef]
- Yang, R.B.; Mal, A.K. The effective transverse moduli of a composite with degraded fiber-matrix interfaces. Int. J. Eng. Sci. 1995, 33, 1623–1632. [Google Scholar] [CrossRef]
- Lee, J.K.; Mal, A.K. A volume integral equation technique for multiple inclusion and crack interaction problems. J. Appl. Mech. 1997, 64, 23–31. [Google Scholar] [CrossRef]
- Lee, J.K.; Mal, A.K. A volume integral equation technique for multiple scattering problems in elastodynamics. Appl. Math. Comput. 1995, 67, 135–159. [Google Scholar] [CrossRef]
- Nimmer, R.P.; Bankert, R.J.; Russel, E.S.; Smith, G.A.; Wright, P.K. Micromechanical modeling of fiber/matrix interface effects in transversely loaded SiC/Ti-6-4 metal matrix composites. J. Compos. Tech. Res. 1991, 13, 3–13. [Google Scholar]
- Lee, J.; Mal, A. Characterization of matrix damage in metal matrix composites under transverse loads. Comput. Mech. 1998, 21, 339–346. [Google Scholar] [CrossRef]
- Aghdam, M.M.; Falahatgar, S.R. Micromechanical modeling of interface damage of metal matrix composites subjected to transverse loading. Compos. Struct. 2004, 66, 415–420. [Google Scholar] [CrossRef]
- Mal, A.K.; Knopoff, L. Elastic wave velocities in two component systems. J. Inst. Math. Appl. 1967, 3, 376–387. [Google Scholar] [CrossRef]
- Lee, J.K.; Lee, H.C.; Jeong, H.G. Multiple scattering using parallel volume integral equation method: Interaction of SH waves with multiple multilayered anisotropic elliptical inclusions. Math. Probl. Eng. 2015. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.K.; Lee, H.M.; Mal, A. A mixed volume and boundary integral equation technique for elastic wave field calculations in heterogeneous materials. Wave Motion 2004, 39, 1–19. [Google Scholar] [CrossRef]
- Buryachenko, V.A. Micromechanics of Heterogeneous Materials; Springer: New York, NY, USA, 2007. [Google Scholar]
- Advances in Computers and Information in Engineering Research; Michopoulos, J.G.; Rosen, D.W.; Paredis, C.J.; Vance, J.M. (Eds.) ASME Press: New York, NY, USA, 2020; Volume 2, in press. [Google Scholar]
- Lee, J.K.; Oh, S.M.; Mal, A. Calculation of interfacial stresses in composites containing elliptical inclusions of various types. Eur. J. Mech. A Solid. 2014, 44, 17–40. [Google Scholar] [CrossRef]
- Buryachenko, V.A.; Bechel, V.T. A series solution of the volume integral equation for multiple-inclusion interaction problems. Compos. Sci. Technol. 2000, 60, 2465–2469. [Google Scholar] [CrossRef]
- Buryachenko, V.A. Solution of general integral equations of micromechanics of heterogeneous materials. Int. J. Solids Struct. 2014, 51, 3823–3843. [Google Scholar] [CrossRef] [Green Version]
- PATRAN User’s Manual, version 2008 r2; MSC Sotware: Newport Beach, CA, USA, 2008.
- Banerjee, P.K. The Boundary Element Methods in Engineering; McGraw-Hill: London, UK, 1993. [Google Scholar]
- Pao, Y.-H.; Varatharajulu, V. Huygens’ principle, radiation conditions, and integral formulas for the scattering of elastic waves. J. Acoust. Soc. Am. 1976, 59, 1361–1369. [Google Scholar] [CrossRef]
- Li, H.B.; Han, G.M.; Mang, H.A. A new method for evaluating singular integrals in stress analysis of solids by the direct boundary element method. Int. J. Numer. Methods Eng. 1985, 21, 2071–2098. [Google Scholar] [CrossRef]
- Shibata, M.; Ono, K. Stress concentration due to a prolate spheroidal inclusion. J. Compos. Mater. 1978, 12, 132–138. [Google Scholar] [CrossRef]
- Eshelby, J.D. The determination of the elastic field of an ellipsoidal inclusion and related problems. Proc. Royal Soc. A 1957, 241, 376–396. [Google Scholar]
- Ma, H. Solutions of Eshelby-Type Inclusion Problems and a Related Homogenization Method Based on a Simplified Strain Gradient Elasticity Theory. Ph.D. Thesis, Department of Mechanical Engineering, Texas A&M University, College Station, TX, USA, 2010. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (Unit: GPa) | Isotropic Matrix (mat_01) | Isotropic Inhomogeneity (mat_01) |
|---|---|---|
| λ | 67.34 | 176.06 |
| μ | 37.88 | 176.06 |
| Isotropic Matrix (mat_01, 02, 03, 04) | Isotropic Inhomogeneity (mat_01) | Orthotropic Inhomogeneity #1 (mat_02) | Orthotropic Inhomogeneity #2 (mat_03) | Orthotropic Inhomogeneity #3 (mat_04) | |
|---|---|---|---|---|---|
| c11 [GPa] | 143.10 | 528.18 | 139.54 | 279.08 | 418.61 |
| c12 [GPa] | 67.34 | 176.06 | 3.90 | 7.80 | 11.70 |
| c13 [GPa] | 67.34 | 176.06 | 3.90 | 7.80 | 11.70 |
| c22 [GPa] | 143.10 | 528.18 | 15.28 | 30.56 | 45.83 |
| c23 [GPa] | 67.34 | 176.06 | 3.29 | 6.59 | 9.88 |
| c33 [GPa] | 143.10 | 528.18 | 15.28 | 30.56 | 45.83 |
| c44 [GPa] | 37.88 | 176.06 | 5.90 | 11.80 | 17.70 |
| c55 [GPa] | 37.88 | 176.06 | 5.90 | 11.80 | 17.70 |
| c66 [GPa] | 37.88 | 176.06 | 5.90 | 11.80 | 17.70 |
| Singular Point | Triangular Prism | Tetrahedron | Node 1 | Node 2 | Node 3 | Node 4 |
|---|---|---|---|---|---|---|
| 1 | 1 | 1 | 1 | 5 | 7 | 19 |
| 2 | 1 | 17 | 5 | 19 | ||
| 3 | 1 | 13 | 17 | 19 | ||
| 2 | 1 | 1 | 3 | 5 | 17 | |
| 2 | 1 | 15 | 3 | 17 | ||
| 3 | 1 | 13 | 15 | 17 | ||
| 3 | 1 | 1 | 3 | 7 | 1 | 13 |
| 2 | 3 | 19 | 7 | 13 | ||
| 3 | 3 | 15 | 19 | 13 | ||
| 2 | 1 | 3 | 5 | 7 | 19 | |
| 2 | 3 | 17 | 5 | 19 | ||
| 3 | 3 | 15 | 17 | 19 | ||
| 5 | 1 | 1 | 5 | 7 | 1 | 19 |
| 2 | 5 | 1 | 13 | 19 | ||
| 3 | 5 | 13 | 17 | 19 | ||
| 2 | 1 | 5 | 1 | 3 | 13 | |
| 2 | 5 | 3 | 15 | 13 | ||
| 3 | 5 | 15 | 17 | 13 | ||
| 7 | 1 | 1 | 7 | 1 | 3 | 13 |
| 2 | 7 | 3 | 15 | 13 | ||
| 3 | 7 | 15 | 19 | 13 | ||
| 2 | 1 | 7 | 3 | 5 | 15 | |
| 2 | 7 | 5 | 17 | 15 | ||
| 3 | 7 | 17 | 19 | 15 | ||
| 13 | 1 | 1 | 13 | 17 | 15 | 3 |
| 2 | 13 | 5 | 17 | 3 | ||
| 3 | 13 | 1 | 5 | 3 | ||
| 2 | 1 | 13 | 19 | 17 | 5 | |
| 2 | 13 | 7 | 19 | 5 | ||
| 3 | 13 | 1 | 7 | 5 | ||
| 15 | 1 | 1 | 15 | 19 | 17 | 5 |
| 2 | 15 | 7 | 19 | 5 | ||
| 3 | 15 | 3 | 7 | 5 | ||
| 2 | 1 | 15 | 13 | 19 | 7 | |
| 2 | 15 | 1 | 13 | 7 | ||
| 3 | 15 | 3 | 1 | 7 | ||
| 17 | 1 | 1 | 17 | 15 | 13 | 3 |
| 2 | 17 | 13 | 1 | 3 | ||
| 3 | 17 | 1 | 5 | 3 | ||
| 2 | 1 | 17 | 13 | 19 | 1 | |
| 2 | 17 | 19 | 7 | 1 | ||
| 3 | 17 | 7 | 5 | 1 | ||
| 19 | 1 | 1 | 19 | 17 | 15 | 5 |
| 2 | 19 | 15 | 3 | 5 | ||
| 3 | 19 | 3 | 7 | 5 | ||
| 2 | 1 | 19 | 15 | 13 | 3 | |
| 2 | 19 | 13 | 1 | 3 | ||
| 3 | 19 | 1 | 7 | 3 |
| Singular Point | Triangular Prism | Tetrahedron | Node 1 | Node 2 | Node 3 | Node 4 |
|---|---|---|---|---|---|---|
| 2 | 1 | 1 | 2 | 3 | 5 | 15 |
| 2 | 2 | 5 | 17 | 15 | ||
| 3 | 2 | 17 | 14 | 15 | ||
| 2 | 1 | 2 | 5 | 7 | 19 | |
| 2 | 2 | 17 | 5 | 19 | ||
| 3 | 2 | 14 | 17 | 19 | ||
| 3 | 1 | 2 | 7 | 1 | 13 | |
| 2 | 2 | 19 | 7 | 13 | ||
| 3 | 2 | 14 | 19 | 13 | ||
| 4 | 1 | 1 | 4 | 1 | 3 | 13 |
| 2 | 4 | 3 | 15 | 13 | ||
| 3 | 4 | 15 | 16 | 13 | ||
| 2 | 1 | 4 | 7 | 1 | 13 | |
| 2 | 4 | 19 | 7 | 13 | ||
| 3 | 4 | 16 | 19 | 13 | ||
| 3 | 1 | 4 | 5 | 7 | 19 | |
| 2 | 4 | 17 | 5 | 19 | ||
| 3 | 4 | 16 | 17 | 19 | ||
| 6 | 1 | 1 | 6 | 3 | 5 | 15 |
| 2 | 6 | 5 | 17 | 15 | ||
| 3 | 6 | 17 | 18 | 15 | ||
| 2 | 1 | 6 | 1 | 3 | 15 | |
| 2 | 6 | 13 | 1 | 15 | ||
| 3 | 6 | 18 | 13 | 15 | ||
| 3 | 1 | 6 | 7 | 1 | 13 | |
| 2 | 6 | 19 | 7 | 13 | ||
| 3 | 6 | 18 | 19 | 13 | ||
| 8 | 1 | 1 | 8 | 1 | 3 | 15 |
| 2 | 8 | 13 | 1 | 15 | ||
| 3 | 8 | 20 | 13 | 15 | ||
| 2 | 1 | 8 | 3 | 5 | 15 | |
| 2 | 8 | 5 | 17 | 15 | ||
| 3 | 8 | 17 | 20 | 15 | ||
| 3 | 1 | 8 | 5 | 7 | 17 | |
| 2 | 8 | 7 | 19 | 17 | ||
| 3 | 8 | 19 | 20 | 17 | ||
| 9 | 1 | 1 | 9 | 13 | 15 | 17 |
| 2 | 9 | 19 | 13 | 17 | ||
| 3 | 9 | 12 | 19 | 17 | ||
| 2 | 1 | 9 | 15 | 3 | 17 | |
| 2 | 9 | 3 | 5 | 17 | ||
| 3 | 9 | 5 | 12 | 17 | ||
| 3 | 1 | 9 | 3 | 1 | 5 | |
| 2 | 9 | 1 | 7 | 5 | ||
| 3 | 9 | 7 | 12 | 5 | ||
| 10 | 1 | 1 | 10 | 13 | 15 | 19 |
| 2 | 10 | 15 | 17 | 19 | ||
| 3 | 10 | 17 | 11 | 19 | ||
| 2 | 1 | 10 | 1 | 13 | 19 | |
| 2 | 10 | 7 | 1 | 19 | ||
| 3 | 10 | 11 | 7 | 19 | ||
| 3 | 1 | 10 | 3 | 1 | 7 | |
| 2 | 10 | 5 | 3 | 7 | ||
| 3 | 10 | 11 | 5 | 7 | ||
| 11 | 1 | 1 | 11 | 17 | 19 | 13 |
| 2 | 11 | 15 | 17 | 13 | ||
| 3 | 11 | 10 | 15 | 13 | ||
| 2 | 1 | 11 | 19 | 7 | 13 | |
| 2 | 11 | 7 | 1 | 13 | ||
| 3 | 11 | 1 | 10 | 13 | ||
| 3 | 1 | 11 | 7 | 5 | 1 | |
| 2 | 11 | 5 | 3 | 1 | ||
| 3 | 11 | 3 | 10 | 1 | ||
| 12 | 1 | 1 | 12 | 17 | 19 | 15 |
| 2 | 12 | 19 | 13 | 15 | ||
| 3 | 12 | 13 | 9 | 15 | ||
| 2 | 1 | 12 | 5 | 17 | 15 | |
| 2 | 12 | 3 | 5 | 15 | ||
| 3 | 12 | 9 | 3 | 15 | ||
| 3 | 1 | 12 | 7 | 5 | 3 | |
| 2 | 12 | 1 | 7 | 3 | ||
| 3 | 12 | 9 | 1 | 3 | ||
| 14 | 1 | 1 | 14 | 17 | 15 | 5 |
| 2 | 14 | 15 | 3 | 5 | ||
| 3 | 14 | 3 | 2 | 5 | ||
| 2 | 1 | 14 | 19 | 17 | 5 | |
| 2 | 14 | 7 | 19 | 5 | ||
| 3 | 14 | 2 | 7 | 5 | ||
| 3 | 1 | 14 | 13 | 19 | 7 | |
| 2 | 14 | 1 | 13 | 7 | ||
| 3 | 14 | 2 | 1 | 7 | ||
| 16 | 1 | 1 | 16 | 19 | 17 | 7 |
| 2 | 16 | 17 | 5 | 7 | ||
| 3 | 16 | 5 | 4 | 7 | ||
| 2 | 1 | 16 | 13 | 19 | 7 | |
| 2 | 16 | 1 | 13 | 7 | ||
| 3 | 16 | 4 | 1 | 7 | ||
| 3 | 1 | 16 | 15 | 13 | 1 | |
| 2 | 16 | 3 | 15 | 1 | ||
| 3 | 16 | 4 | 3 | 1 | ||
| 18 | 1 | 1 | 18 | 17 | 15 | 3 |
| 2 | 18 | 5 | 17 | 3 | ||
| 3 | 18 | 6 | 5 | 3 | ||
| 2 | 1 | 18 | 15 | 13 | 3 | |
| 2 | 18 | 13 | 1 | 3 | ||
| 3 | 18 | 1 | 6 | 3 | ||
| 3 | 1 | 18 | 13 | 19 | 1 | |
| 2 | 18 | 19 | 7 | 1 | ||
| 3 | 18 | 7 | 6 | 1 | ||
| 20 | 1 | 1 | 20 | 15 | 13 | 3 |
| 2 | 20 | 13 | 1 | 3 | ||
| 3 | 20 | 1 | 8 | 3 | ||
| 2 | 1 | 20 | 17 | 15 | 3 | |
| 2 | 20 | 5 | 17 | 3 | ||
| 3 | 20 | 8 | 5 | 3 | ||
| 3 | 1 | 20 | 19 | 17 | 5 | |
| 2 | 20 | 7 | 19 | 5 | ||
| 3 | 20 | 8 | 7 | 5 |
| Isotropic Matrix (mat_05) | Isotropic Inhomogeneity (mat_05) | Isotropic Matrix (mat_06) | Isotropic Inhomogeneity (mat_06) | |
|---|---|---|---|---|
| λ [GPa] | 75.0 | 150.0 | 75.0 | 375.0 |
| μ [GPa] | 37.5 | 75.0 | 37.5 | 187.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.; Han, M. Three-Dimensional Volume Integral Equation Method for Solving Isotropic/Anisotropic Inhomogeneity Problems. Mathematics 2020, 8, 1866. https://doi.org/10.3390/math8111866
Lee J, Han M. Three-Dimensional Volume Integral Equation Method for Solving Isotropic/Anisotropic Inhomogeneity Problems. Mathematics. 2020; 8(11):1866. https://doi.org/10.3390/math8111866
Chicago/Turabian StyleLee, Jungki, and Mingu Han. 2020. "Three-Dimensional Volume Integral Equation Method for Solving Isotropic/Anisotropic Inhomogeneity Problems" Mathematics 8, no. 11: 1866. https://doi.org/10.3390/math8111866
APA StyleLee, J., & Han, M. (2020). Three-Dimensional Volume Integral Equation Method for Solving Isotropic/Anisotropic Inhomogeneity Problems. Mathematics, 8(11), 1866. https://doi.org/10.3390/math8111866