
Novel Criteria of Stability for Delayed Memristive Quaternionic Neural Networks: Directly Quaternionic Method

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Mathematical Fundamentals and Model Statement
2.1. Quaternionic Synopsis
2.2. Model Statement and Definitions
- (H)
- The continuous function and satisfy the following conditions:for any h, , where , , .
- (i)
- Each leading principal minors of matrix B is positive.
- (ii)
- If , and there is a vector meeting .
3. Main Results
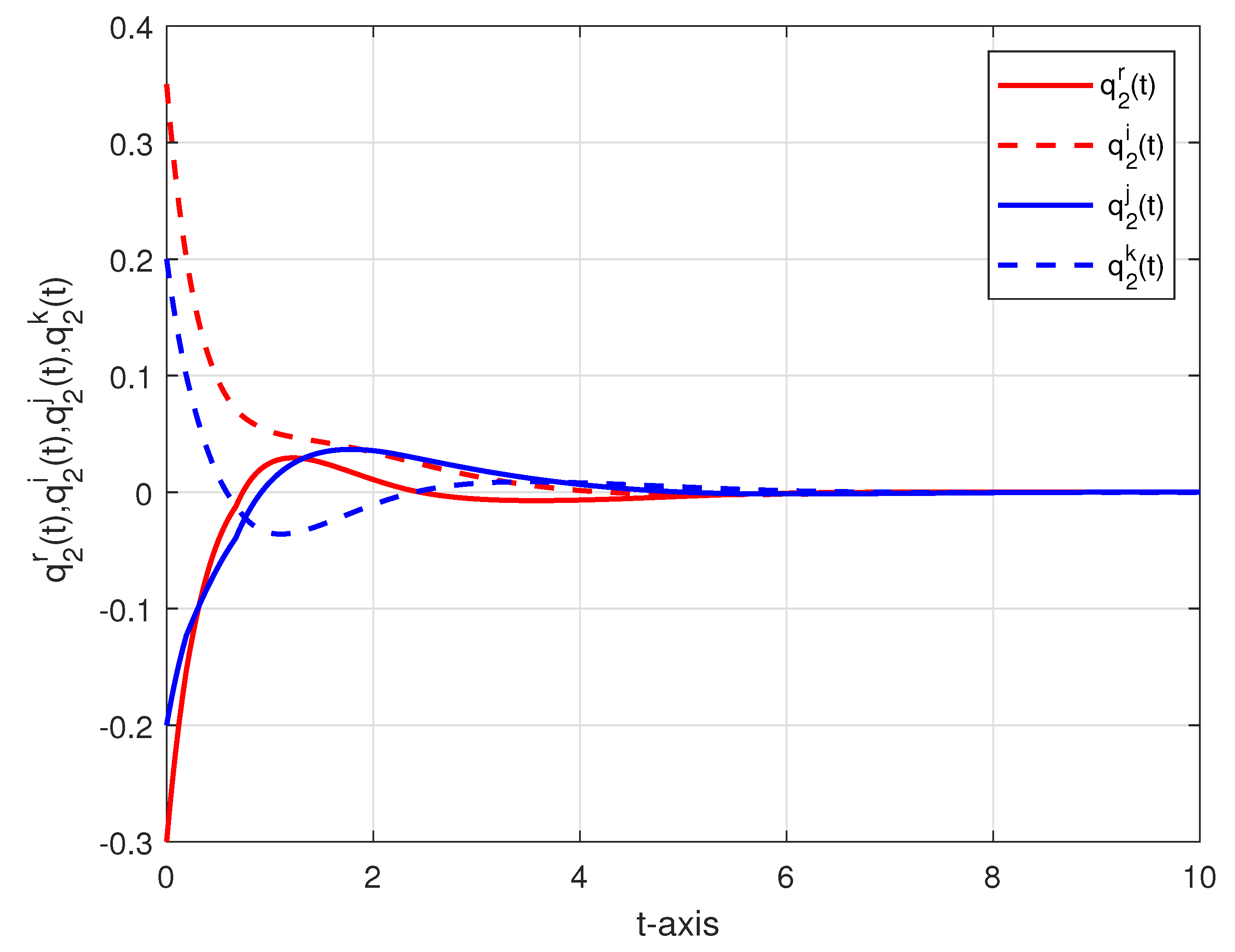
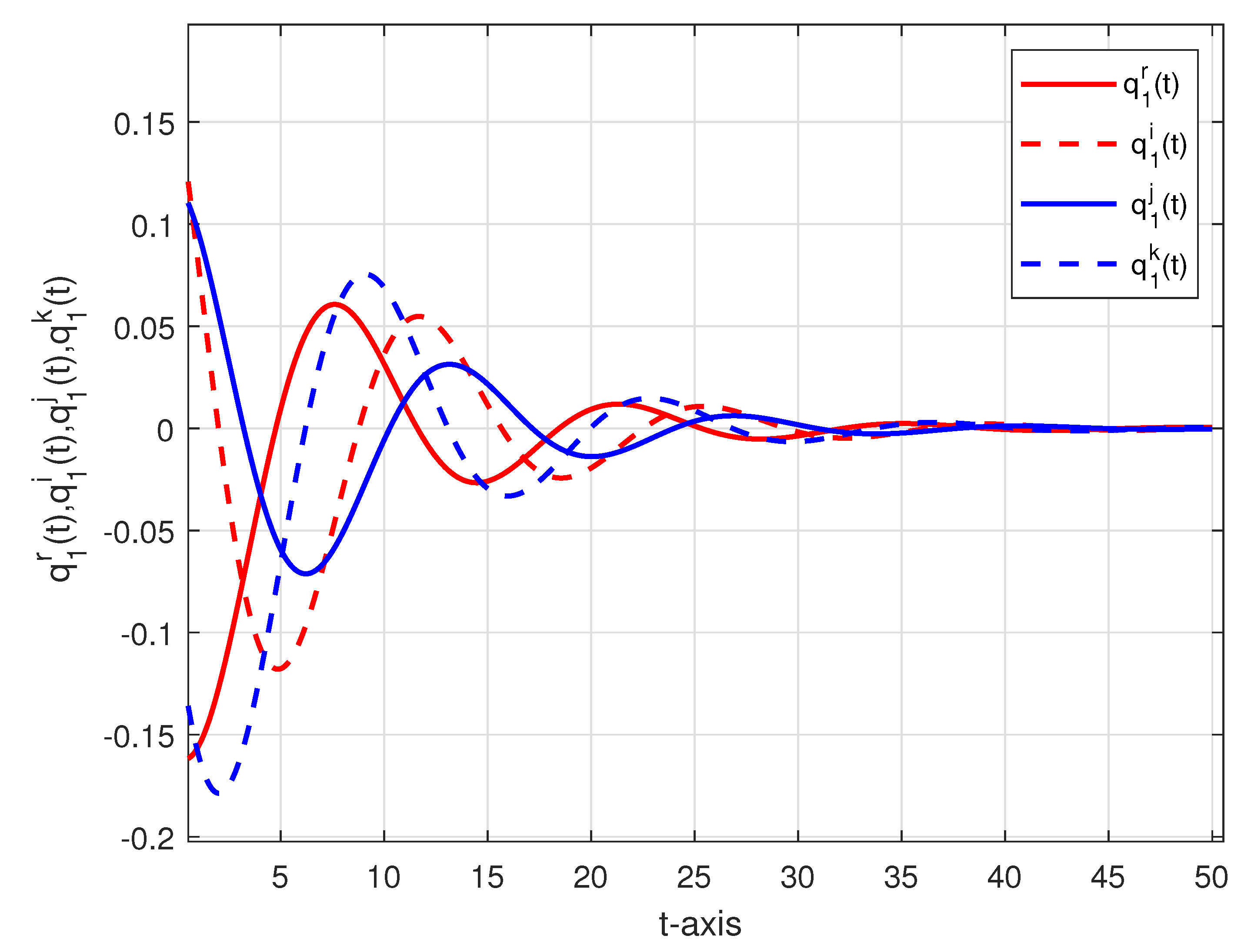
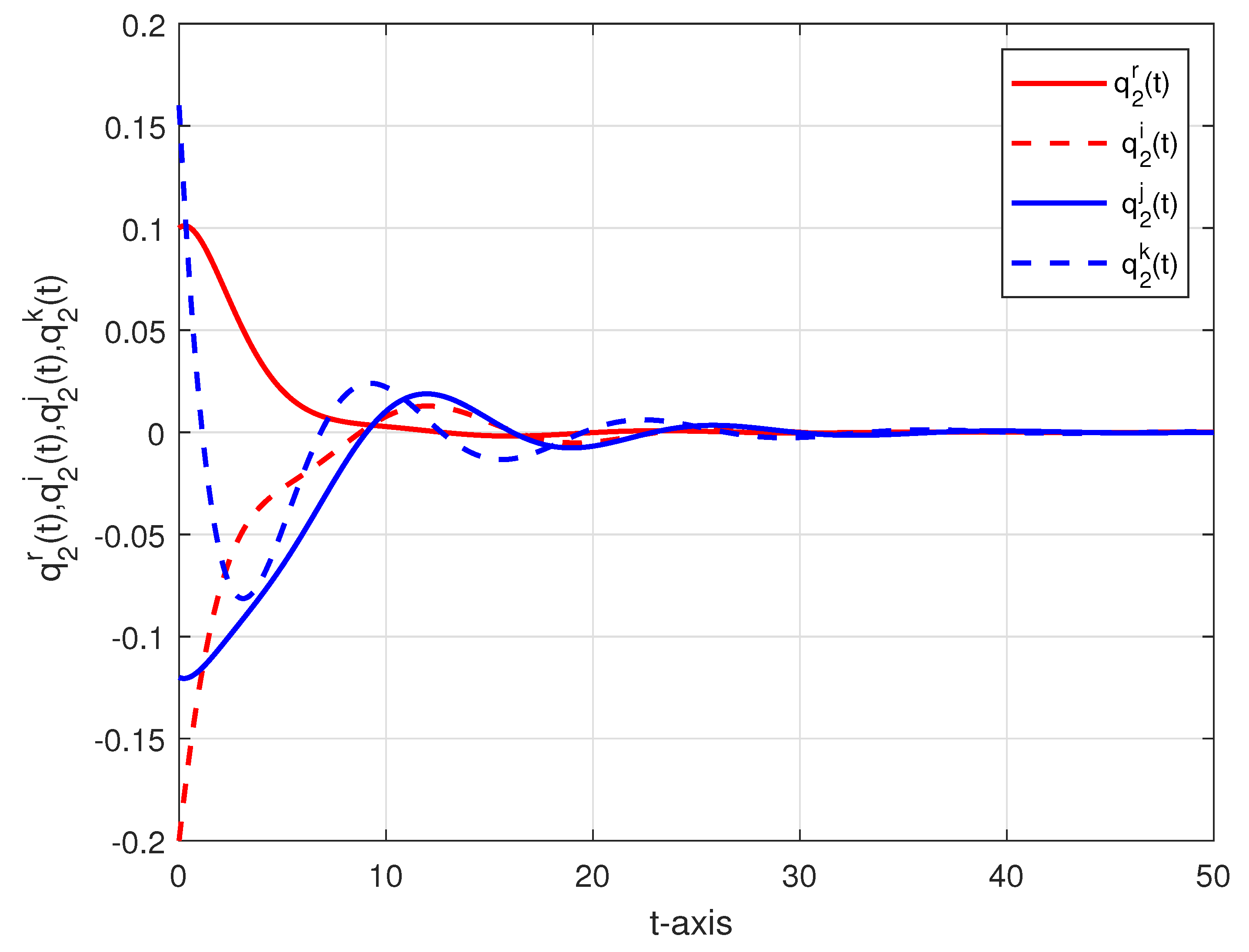
4. Examples
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, Y.; Fang, S. Neurocomputing with time delay analysis for solving convex quadratic programming problems. IEEE Trans. Neural Netw. 2000, 11, 230–240. [Google Scholar] [CrossRef] [PubMed]
- Deng, J.; Sundararajan, N.; Saratchandran, P. Communication channel equalization using complex-valued minimal radial basis function neural networks. IEEE Trans. Neural Netw. 2002, 13, 687–696. [Google Scholar] [CrossRef]
- Chua, L.O. Memristor-the missing circuit element. IEEE Trans. Circuit Theor. 1971, 18, 507–519. [Google Scholar] [CrossRef]
- Zhang, W.; Huang, T.; He, X.; Li, C. Global exponential stability of inertial memristor-based neural networks with time-varying delays and impulses. Neural Netw. 2017, 95, 102–109. [Google Scholar] [CrossRef] [PubMed]
- Ali, M.S.; Saravanan, S. Finite-time stability for memristor-based uncertain neural networks with time-varying delays via average dwell time approach. Chin. J. Phys. 2017, 55, 1953–1971. [Google Scholar]
- Guo, R.; Zhang, Z.; Liu, X.; Lin, C. Existence, uniqueness, and exponential stability analysis for complex-valued memristor-based bam neural networks with time delays. Appl. Math. Comput. 2017, 311, 100–117. [Google Scholar]
- Zhang, Z.; Liu, X.; Lin, C.; Zhou, S. Exponential stability analysis for delayed complex-valued memristor-based recurrent neural networks. Neural Comput. Appl. 2019, 31, 1893–1903. [Google Scholar] [CrossRef]
- Kusamichi, H.; Isokawa, T.; Matsui, N.; Ogawa, Y.; Maeda, K. A new scheme for color night vision by quaternion neural network. In Proceedings of the 2nd International Conference on Autonomous Robots and Agents (ICARA2004), Palmerston North, New Zealand, 13–15 December 2004; pp. 101–106. [Google Scholar]
- Isokawa, T.; Kusakabe, T.; Matsui, N.; Peper, F. Quaternion Neural Network and Its Application; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Shang, F.; Hirose, A. Quaternion neural-network-based polsar land classification in poincare-sphere-parameter space. IEEE Trans. Geosci. Remote. Sens. Mag. 2014, 52, 5693–5703. [Google Scholar] [CrossRef]
- Tu, Z.; Zhao, Y.; Ding, N.; Feng, Y.; Zhang, W. Stability analysis of quaternion-valued neural networks with both discrete and distributed delays. Appl. Math. Comput. 2019, 343, 342–353. [Google Scholar] [CrossRef]
- Chen, X.; Li, Z.; Song, Q.; Hu, J.; Tan, Y. Robust stability analysis of quaternion-valued neural networks with time delays and parameter uncertainties. Neural Netw. 2017, 91, 55–65. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Xiang, J.; Li, B. Almost periodic solutions of quaternion-valued neutral type high-order hopfield neural networks with state-dependent delays and leakage delays. Appl. Intell. 2020, 50, 1–12. [Google Scholar] [CrossRef]
- You, X.; Song, Q.; Liang, J.; Liu, Y.; Alsaadi, F. Global μ-stability of quaternion-valued neural networks with mixed time-varying delays. Neurocomputing 2018, 290, 12–25. [Google Scholar] [CrossRef]
- Wei, H.; Wu, B.; Li, R. Synchronization control of quaternion-valued neural networks with parameter uncertainties. Neural Process. Lett. 2019, 51, 1–20. [Google Scholar] [CrossRef]
- Li, Y.; Shen, S. Pseudo almost periodic synchronization of Clifford-valued fuzzy cellular neural networks with time-varying delays on time scales. Adv. Differ. Equ. 2020, 1, 1–22. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, Y.; Lu, J.; Cao, J. Global μ-stability criteria for quaternion-valued neural networks with unbounded time-varying delays. Inform. Sci. 2016, 360, 273–288. [Google Scholar]
- Li, N.; Cao, J. Global dissipativity analysis of quaternion-valued memristor-based neural networks with proportional delay. Neurocomputing 2018, 321, 103–113. [Google Scholar] [CrossRef]
- Tu, Z.; Wang, D.; Yang, X.; Cao, J. Lagrange stability of memristive quaternion-valued neural networks with neutral items. Neurocomputing 2020, 399, 380–389. [Google Scholar] [CrossRef]
- Carlson, D. Nonnegative matrices in the mathematical sciences. Siam Rev. 1981, 23, 409–410. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, J.; Xiong, L. Novel Criteria of Stability for Delayed Memristive Quaternionic Neural Networks: Directly Quaternionic Method. Mathematics 2021, 9, 1291. https://doi.org/10.3390/math9111291
Pan J, Xiong L. Novel Criteria of Stability for Delayed Memristive Quaternionic Neural Networks: Directly Quaternionic Method. Mathematics. 2021; 9(11):1291. https://doi.org/10.3390/math9111291
Chicago/Turabian StylePan, Jie, and Lianglin Xiong. 2021. "Novel Criteria of Stability for Delayed Memristive Quaternionic Neural Networks: Directly Quaternionic Method" Mathematics 9, no. 11: 1291. https://doi.org/10.3390/math9111291
APA StylePan, J., & Xiong, L. (2021). Novel Criteria of Stability for Delayed Memristive Quaternionic Neural Networks: Directly Quaternionic Method. Mathematics, 9(11), 1291. https://doi.org/10.3390/math9111291