
A Forgotten Differential Equation Studied by Jacopo Riccati Revisited in Terms of Lie Symmetries


{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
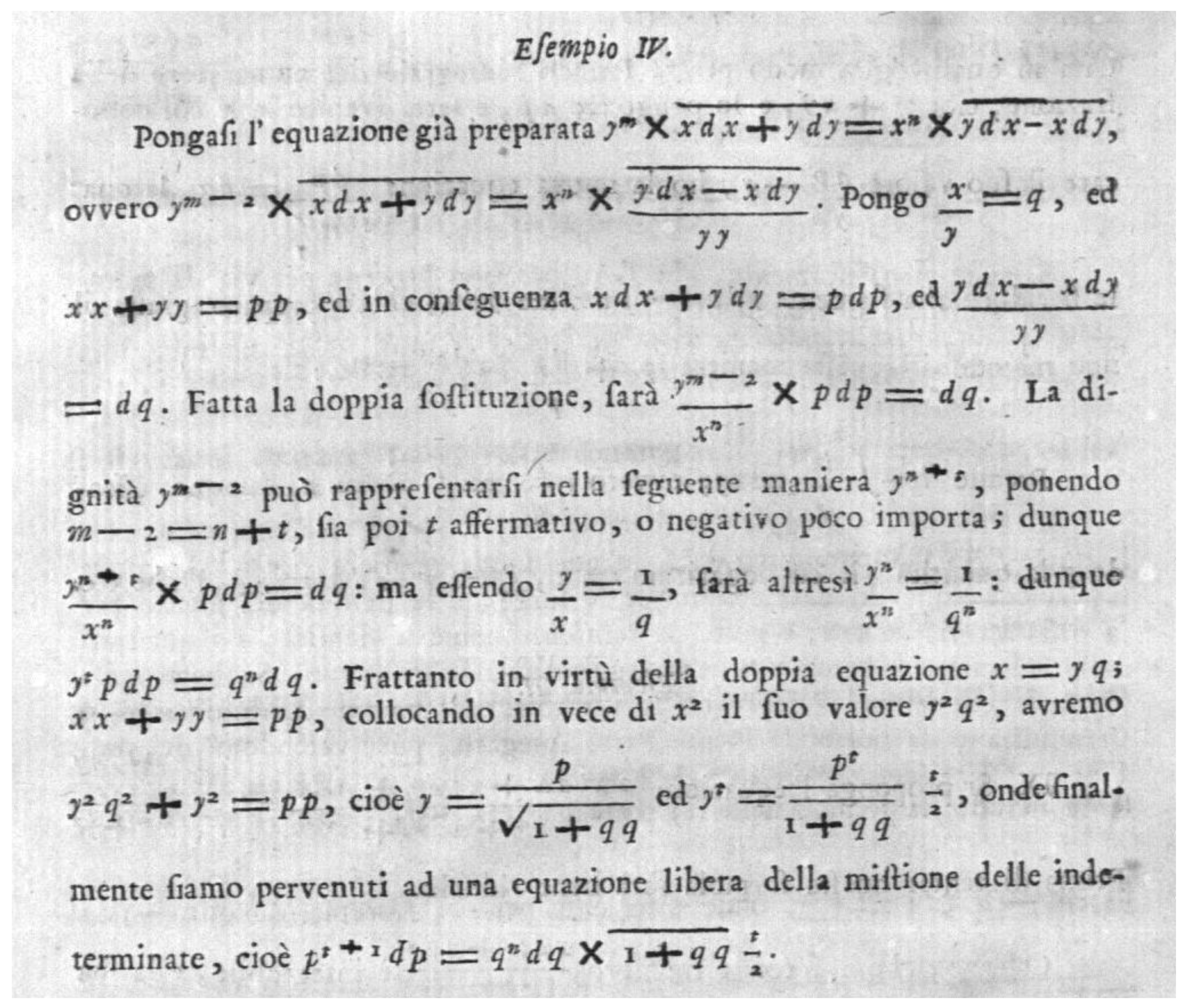
2.1. The Original Equation
2.2. Approach via Lie Theory
3. Results
3.1. Hypergeometric Integrations
3.2. A More General Equation
4. Discussion
5. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Hydon, P.E. Symmetry Methods for Differential Equations; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Spiegel, M.R. Applied Differential Equation, 2nd ed.; Prentice-Hall Inc.: Englewood Cliffs, NJ, USA, 1967. [Google Scholar]
- Ritger, P.D.; Rose, N.J. Differential Equation with Applications; Mc Graw Hill: New York, NY, USA, 1968. [Google Scholar]
- Riccati, J. Opere del Conte Jacopo Riccati, Nobile Trevigiano, Tomo I; Appresso J. Giusti: Lucca, Italy, 1761. [Google Scholar]
- Legendre, A.M. Exercices de Calcul Intégral sur Divers Ordres de Transcendantes et Sur Les Quadratures; Courcier: Paris, France, 1811. [Google Scholar]
- Wolfram. The Mathematical Functions Website. Available online: http://functions.wolfram.com (accessed on 5 June 2021).

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ritelli, D. A Forgotten Differential Equation Studied by Jacopo Riccati Revisited in Terms of Lie Symmetries. Mathematics 2021, 9, 1312. https://doi.org/10.3390/math9111312
Ritelli D. A Forgotten Differential Equation Studied by Jacopo Riccati Revisited in Terms of Lie Symmetries. Mathematics. 2021; 9(11):1312. https://doi.org/10.3390/math9111312
Chicago/Turabian StyleRitelli, Daniele. 2021. "A Forgotten Differential Equation Studied by Jacopo Riccati Revisited in Terms of Lie Symmetries" Mathematics 9, no. 11: 1312. https://doi.org/10.3390/math9111312
APA StyleRitelli, D. (2021). A Forgotten Differential Equation Studied by Jacopo Riccati Revisited in Terms of Lie Symmetries. Mathematics, 9(11), 1312. https://doi.org/10.3390/math9111312