1. Introduction
Soft topology is born from the interaction between soft set theory [
1] and set-theoretic topology [
2,
3]. This field investigates a construction on the set of all soft sets that replicates the axiomatic behavior of the topological spaces from the perspective of soft unions and intersections.
Soft set theory is concerned with descriptions of a universal set of alternatives as expressed by a set of apposite characteristics. Since its establishment in 1999, soft set theory has become a flourishing research field (see for example [
4,
5]). It has been hybridized with other models (e.g., fuzzy soft sets [
6], and their extensions by intuitionistic fuzzy soft sets [
7] and hesitant fuzzy soft sets [
8]; probabilistic and dual probabilistic soft sets [
9]). The soft set model has been expanded (e.g., incomplete soft sets [
10],
N-soft sets [
11]) and applied to many fields like medicine [
12] or financial forecasting [
13].
By the inspiration of the structure of a topological space, Çağman et al. [
14] and Shabir and Naz [
15] independently launched the field of soft topology. This novel structure does not consist of a standard topology on a set. The principles of soft topology about unions and intersections do not apply to subsets (i.e., to collections of elements from the ground set) as in topology. Instead, they apply to soft sets (i.e., to individual elements from the ground set). Although directly motivated by the axioms of a topology, soft topology builds on different essentials.
There are many papers with substantial contributions to the development of soft topology. Let us summarize some milestones of this theory.
A large part of the literature on soft topology consists of definitions of concepts and investigation of basic relationships among them. Concepts like soft second-countability are indisputable. However, this is not always the case: for various reasons, the extension of well-established notions in set-theoretic topology to soft topology is sometimes controversial. Let us see some cases.
Consider first the concept of ‘separability’. It had been exported to the field of soft metric spaces [
16]. Then, in the general setting of soft topological spaces, in [
17], two related axioms of soft separability are proposed; then, their performance and connection to soft second-countability are investigated. The requirements for a reliable concept of ‘soft separability’ are discussed in [
17] too. Soft separation axioms are not exported straight away either [
18].
Concepts in the vein of topological compactness have been proposed in various articles. Aygünoğlu and Aygün [
19] initiate the analysis of soft compactness. Recently, Al-shami et al. [
20] have produced seven generalized types of soft semi-compact spaces.
Another branch of the literature investigates procedures that generate soft topologies on the set of alternatives. For example, Al-shami et al. [
21] have recently suggested the useful idea of sum of soft topological spaces. In addition, soft topologies can also be produced from elements pertaining to standard topology theory. These elements may be a set of topologies [
17,
22], or, alternatively, a collection of bases for topologies [
17].
The success of the soft topological approach paved the way to subsequent variants of the idea. Fuzzy soft topological spaces have enjoyed a comparable success [
23,
24,
25]. They were built on fuzzy soft sets [
6]. A novel
N-soft topology building on
N-soft sets [
11] is the subject of [
26] that also produces an application to multi-criteria group decision-making. Hesitant fuzzy soft topology was introduced by [
27]. It was built on hesitant fuzzy soft sets [
8]. Soft metric spaces [
16] have been deeply investigated.
This article has a clear-cut objective. For the first time, proofs are provided stating that soft topologies can be fully characterized in terms of standard topologies on a crisp set. Respective explicit constructions ensure a steady two-way transition from one setting to the other. This achievement has several remarkable upshots. Concepts from soft topology that are controversial or unwieldy can be reduced to the corresponding concepts in topology. Results from topological spaces may be exported to soft topological spaces. In fact, we give examples of these fundamental advances too, namely: (1) Soft points, resp., soft bases, in a soft topological space are identified with points (i.e., single-valued subsets), resp., bases, of the topological space associated with it; (2) Soft second countability of a soft topological space is equivalent to second countability of the topology associated with it; (3) The classical result that second-countable topological spaces are separable can be exported to a property of soft topological spaces.
This research article is organized as follows.
Section 2 states preliminary definitions. Then,
Section 3 defines two novel mappings between topological and soft topological spaces. Both constructions are explicit. Their fundamental properties and mutual links are explored too.
Section 4 proves our main theorem, i.e., the equivalence between soft topologies and (crisp) topologies on a suitable product set.
Section 5 exploits this equivalence in order to discuss the cogency of certain soft topological properties. The aim of
Section 6 is to conclude the paper and suggest some future lines of research.
2. Preliminaries
Along this article, X denotes a nonempty set, and E represents a set of attributes. For each set U, we denote by the set formed by all the subsets of U, i.e., the set of parts of the set U.
In this section, we briefly review some basic elements of soft set theory and soft topology. Sometimes, we need to distinguish clearly between topologies and soft topologies, which are not topologies on a set. In this case, we use the term “crisp topology” to mean a topology on a set. The standard notions of set-theoretic topology can be consulted in Munkres [
2] and Willard [
3].
A soft set on
X is a pair
, where
E consists of all the attributes that are needed to characterize the elements of
X, and
F is a mapping
Thus, according to [
1], a soft set over
X is a parameterized family of subsets of
X. From a mathematical viewpoint, a soft set on
X is a multi-function (also called correspondence, point-to-set mapping, or multi-valued mapping)
F from the set of characteristics
E to
X. The set formed by all soft sets on
X with attributes
E shall be expressed as
. Granted that
E is common knowledge, we may write
instead.
When , the subset will be sometimes denoted as for higher accuracy. This is a subset often called the a-approximate elements of X.
When
is a soft set on
X with the property that for each
, the set
is finite (respectively, countable), we say that it is a finite (resp., countable) soft set on
X [
16,
28].
In order to operate with soft sets in a more convenient manner, two descriptions are especially helpful.
- (1)
A soft set is usually described as .
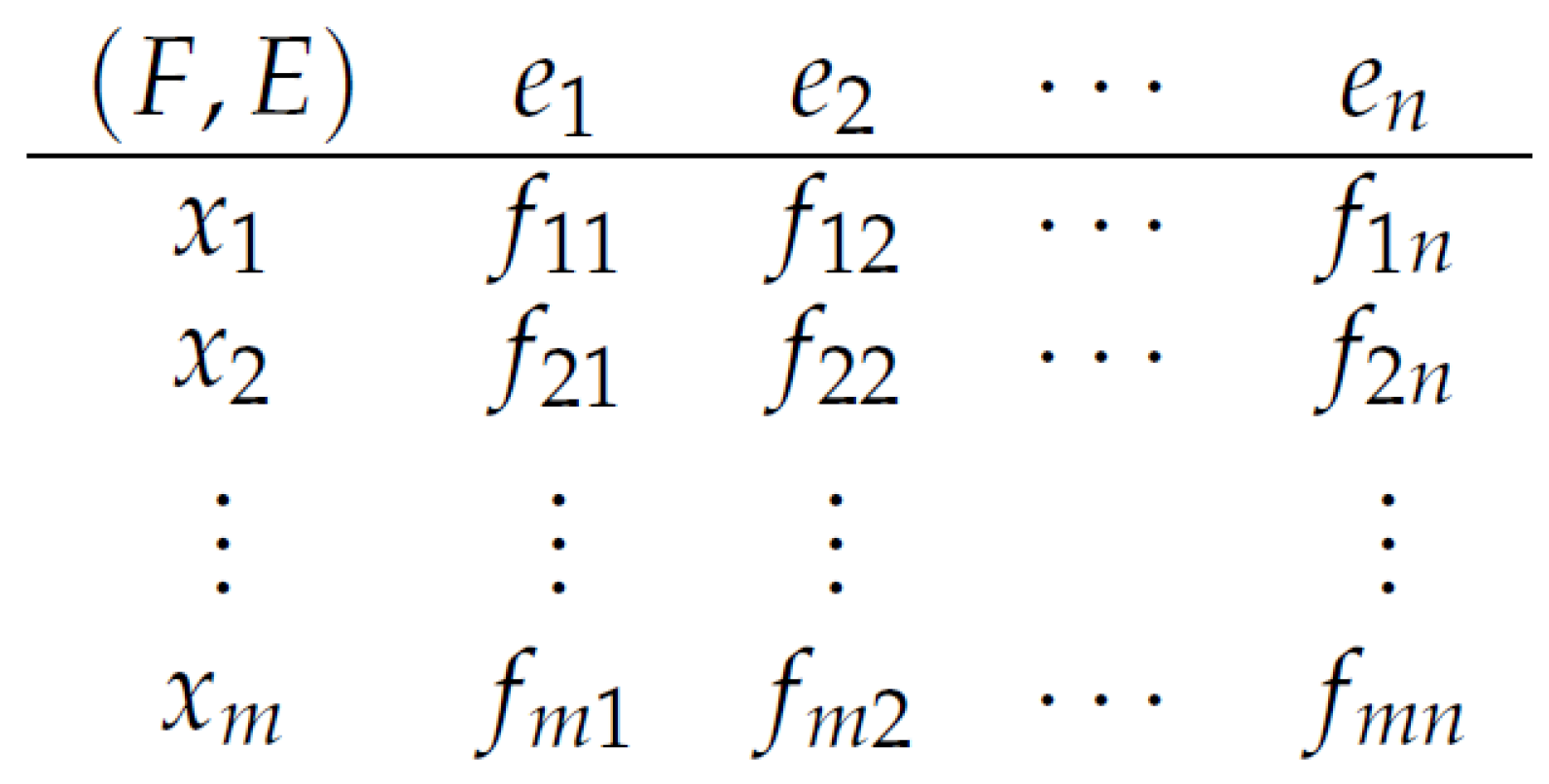
- (2)
In the event that both
X and
E are finite,
can be displayed in tabular form too.
Figure 1 shows this layout when
and
. By convention, in such a table, we write
when
, and
otherwise.
Two extreme examples are the null and absolute soft sets on
X. The null soft set
satisfies
for each
. The absolute soft set
satisfies
for each
. Another special example of soft sets are soft points [
16,
29], which are soft sets
such that there exist
and
with the property
and
when
. Such soft point shall be represented as
. Notice, however, that, for certain authors, soft points have a different meaning [
22]: a soft point is
such that there is
with the property
for all
.
Standard set-theoretic operations are exported to soft set theory. Union, intersection, and inclusion are defined on soft sets from as follows: when ,
- (1)
is with for each .
This can also be written as when .
- (2)
is such that for each .
This can also be written as when .
- (3)
represents the property for each .
The complement of is the soft set such that, for each , .
These operators endow
with the structure of a Boolean lattice (cf., Aygünoğlu and Aygün ([
19] Theorem 2.1)).
Remark 1. The respective extensions of the concepts of union and intersection of two soft sets to arbitrary collections of soft sets are direct.
In addition, a concept of soft equality derives from soft inclusions. Thus, means and . In other words, for each .
Note that the soft-theoretic union acts on elements of
and produces another element of
. In addition, the same goes for the soft-theoretic intersection. They are different from the set-theoretic operators of union and intersection that act on subsets of a given set in order to produce other subsets of the set. This difference carries forward to the concept of a soft topology that we proceed to recall. To be precise, observe a marked contrast in structure.
is a topology on
X when
satisfies a known list of properties [
2,
3]. By contrast, a soft topology on
X (with a fixed set of attributes
E) is
that satisfies the properties in the following definition:
Definition 1 ([14,15]). A soft topology τ on X is a set of soft sets on X, , that satisfies:
- (1)
Both Φ and belong to τ.
- (2)
The union of any collection of soft sets from τ is a member of τ.
- (3)
The intersection of any finite collection of soft sets from τ is a member of τ.
The members of are called soft open sets.
Remark 2. For higher accuracy, when needed, we shall say that τ in Definition 1 is a soft topology for . The standard denomination “τ is a soft topology on X” eschews the role of E that will be crucially important in our main Theorem.
Example 1. The following soft topologies for have been defined in the literature:
- (i)
The indiscrete soft topology is , and the discrete soft topology is [15]. - (ii)
The cofinite soft topology was introduced by [28]
In addition to specific examples of soft topologies, two general procedures exist that generate soft topologies from crisp topologies. The first one is quite direct:
Definition 2 ([17,22]). Let be a collection of crisp topologies on X. The setproduces a soft topology called the soft topology on X generated by the family of topologies Σ.
When for each , we also write .
As an application, in the paper [
17], it was proved that the cofinite soft topology
can be obtained from
, the cofinite (crisp) topology on
X, by the process defined above. Put briefly,
.
The second procedure that generates soft topologies from crisp topologies relies on the behavior of soft open bases. Let us summarize some preliminary facts.
Quite naturally, soft bases are defined as sets of soft sets which generate soft topologies when we produce all their arbitrary soft unions. Thus,
is a soft base for the soft topology
if we can represent each
as the union of a conveniently selected collection of soft sets from
[
14]. Roy and Samanta produced the more operative concept of a soft open base. Any soft open base produces a soft topology ([
30] Theorem 13) in such a way that the soft open base is a soft base of the topology that it generates by this process ([
30] Theorem 16).
In ([
17] Proposition 1), it was proved that each base for a topology produces a soft open base by an explicit definition. Now a soft topology ensues from this soft open base ([
30] Theorem 13). Thus, any base for a crisp topology defines an associated soft topology.
Notice that the two constructions of soft topologies defined above are closely related. Suppose that we fix a base for a crisp topology. We can produce both a crisp topology and a soft open base from it. Then, we can apply Definition 2 to this crisp topology, and we can also produce a soft topology from the soft open base. The conclusion is that the respective soft topologies that we obtain are the same ([
17] Theorem 3).
Theoretical consequences follow from these constructions. For example, recall that a soft second-countable (S2C) soft topology is defined by the property that it possesses a base formed by a countable number of elements ([
16] Definition 4.32). Then, ([
17]
Section 4)] proves that Definition 2 produces a S2C soft topology, provided that each
is second-countable and
E is at most countable. Actually, a converse to this result holds true as well ([
17] Corollary 2).
5. Application: Axioms and Properties of Soft Topological Spaces
This section proves that the theoretical implications of our construction in
Section 4 are far-reaching. We prove results of various different genres:
Characterization of soft topological concepts (like soft bases) by their crisp counterparts.
Characterization of properties of soft topological spaces (like soft second-countability) by their crisp counterparts.
The achievement of new results by importing known theorems from crisp topology.
As to the first goal, Proposition 4 and Corollary 1 below show that concepts in soft topology can be characterized by related concepts in crisp topology.
Proposition 4. Let us fix Σ, a crisp topology on . Then, the following statements are equivalent:
- 1.
is a base of Σ.
- 2.
is a soft base for the soft topology .
Proof. Suppose that
is a base of
, and select
. There is
such that
by (
4). There exists
with
because
is a base of
. Lemma 2 assures that
; therefore,
. This proves that the desired conclusion that
is a soft base for
.
Now, suppose that
is a soft base for
, and select
. We know
by (
9). Thus, there must exist
such that
by (
6). The definition of a soft base entails the existence of
such that
. Lemma 3 assures that
. By statement 2 in Lemma 4,
for each
; therefore,
. This proves the desired conclusion that
is a base of
. □
Corollary 1. Let us fix τ, a soft topology for . The following statements are equivalent:
- 1.
is a soft base for τ.
- 2.
is a base of the crisp topology .
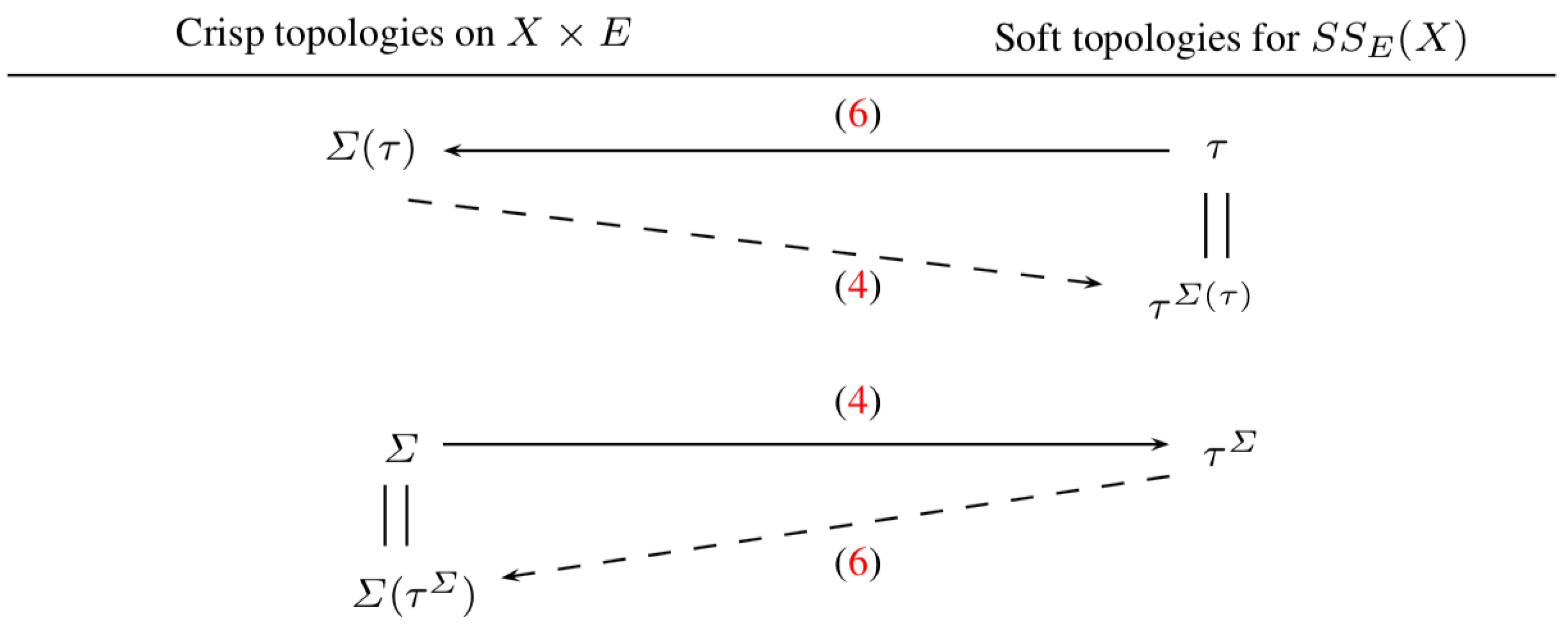
Proof. Proposition 4 justifies that
is a base of
if and only if
is a soft base for the soft topology
. This soft topology is
by Theorem 1 (alternatively, see
Figure 2).
The conclusion follows from statement 1 in Lemma 4. □
The combination of Proposition 4 and Corollary 1 readily proves the next remarkable consequence. Corollary 2 shows that not only definitions, but also properties can be transferred from soft topologies to crisp topologies (or the other way round) as claimed by our second goal:
Corollary 2. Let us fix τ, a soft topology for . Then, τ is soft second-countable if and only if is second-countable.
Another definition that we shall take advantage of is the idea of ‘singletons’. The next two characterizations hold true by routine verifications:
Lemma 5. The following statements are equivalent:
- 1.
is the soft point , i.e., .
- 2.
is the singleton .
Lemma 6. The following statements are equivalent:
- 1.
is the singleton , i.e., .
- 2.
is the soft point .
We now proceed to prove a result that is interesting in its own right, and will help us prove another implication in soft topology. In order to state it, we recall the following concept.
Definition 5 ([17]). The soft topology τ for is soft-points countably-dense (abbreviated as SPCD) when a countable set of soft points exists which is soft τ-dense in X. In addition, is soft τ-dense in X when it satisfies: if , , then there is for which .
A weaker extension of the spirit of topological separability to the field of soft topology was defined in [
17] under the name countable soft-set density. There are technical arguments that qualify these properties as good candidates for separability-like axioms [
17]. At any rate, we can now prove:
Proposition 5. Let us fix Σ, a crisp topology on . If Σ is separable, then the soft topology is SPCD.
Proof. Suppose that is a dense subset for , and I is at most countable. Define the singletons for each . We claim that is soft -dense. Observe that, indeed, each is a soft point by Lemma 6.
Select an arbitrary
,
. There is
such that
by (
4), and necessarily
. Since
is dense for
, there exists
with
or
. Lemma 1 assures that
. This proves the desired conclusion that
is soft
-dense. □
Finally, Proposition 5 allows us to embed a result from [
17] into our new theory. Therefore, the next achievement supports our third goal in this section:
Proposition 6 ([17] (Proposition 1)). Let us fix τ, a soft topology for . If τ is S2C, then it is SPCD.
Proof. Corollary 2 assures that
is a second-countable crisp topology; therefore, it is separable. Now, Proposition 5 entails that
is SPCD. Finally, we know
by virtue of (
8). □



{kind=link}
{kind=link}

