1. Introduction
Magnetorheological (MR) dampers are a kind of intelligent semi-active control device, the output damping force of the damper can be controlled by controlling the current instruction in the coil [
1,
2]. MR dampers are famous for their fast reaction speed, less energy consumption and wide control range; therefore, MR dampers are widely applied in various engineering domains, e.g., vehicle systems [
3,
4]. However, the mathematical models of MR dampers are very complicated because of their special mechanical characteristic-hysteretic property. Xu et al. [
5] introduced a new single-rod MR damper with combined volume compensator; meanwhile, the design method of the combined compensator with independent functions of volume compensation and compensation force was proposed. Yu et al. [
6] proposed a novel compact rotary MR damper with variable damping and stiffness and a unique structure that contains two driven disks and an active rotary disk was designed. Boreiry et al. [
7] investigated the chaotic response of a nonlinear seven-degree-of-freedom full vehicle model equipped with an MR damper, and the equations of motion was proposed by employing the modified Bouc–Wen model for an MR damper. Many MR dampers have emerged with different uses and functions. Among them, the Bouc–Wen model is a typical one, which contains numerous unknown parameters. In addition, a range of other factors, including the current size, piston speed and excitation factors, also affect the accuracy of the model, which makes parameter identification of the model more difficult. Therefore, how to find an effective method to identify the control parameters of MR dampers is of great importance and has become a challenging task. In addition, the possible magneto-thermal problem of the MR damper to MR fluid is also becoming a pressing issue [
8,
9,
10].
With the rapid development of computer technologies, meta-heuristic algorithms, a suitable technology, are applied in MR dampers to establish a set of accurate and reliable models. Many scholars at home and abroad carry out the relevant research work and have achieved some results. Giuclea et al. [
11] used a genetic algorithm (GA) to identify the control parameters of a modified Bouc–Wen model, in which the applied currents are determined using the curve fitting method. However, in addition to the implementation complexity, a GA may suffer from premature convergence and its optimization performance depends mostly on the probability election for crossover, mutation and selecting operators [
12]. Kwok et al. [
13] gave a parameter identification technique for a Bouc–Wen damper model using particle swarm optimization (PSO), and some experimental force–velocity data under various operating conditions were employed. Although PSO is improved by using a stop criterion in this study, it easily traps into the local optima and suffers from premature convergence [
14]. Thus, the application of PSO in MR dampers is limited, owing to its drawbacks of nature.
Despite the shortcomings of PSO and GAs, meta-heuristic methods are particularly popular for their randomness, easy implementation and black box treatment of problems [
15,
16]. An increasing number of scholars have proposed meta-heuristic algorithms inspired from different mechanisms by studying animal behaviors and physical phenomena in nature [
17,
18,
19]. Some of the most popular algorithms are the bat algorithm (BA) [
20], squirrel search algorithm (SSA) [
21], artificial ecosystem-based optimization [
22], whale optimization algorithm (WOA) [
23], virus colony search (VCS) [
24], fruit fly optimization algorithm (FOA) [
25], butterfly optimization algorithm (BOA) [
26], spotted hyena optimizer (SHO) [
27], grasshopper optimization algorithm (GOA) [
28], flower pollination algorithm (FPA) [
29], crow search algorithm (CSA) [
30], grey wolf optimizer (GWO) [
31], water cycle algorithm (WCA) [
32], gravitational search algorithm (GSA) [
33], atom search optimization (ASO) [
34], henry gas solubility optimization (HGSO) [
35], charged system search (CSS) [
36], water evaporation optimization (WEO) [
37], equilibrium optimizer (EO) [
38] and supply–demand-based optimization (SDO) [
39]. In the last ten years, a great number of bio-inspired optimization and nature-inspired optimization algorithms have been proposed. These algorithms are significantly distinct in their natural or biological inspirations; therefore, one can find its category easily and without any ambiguity. In addition, the algorithms are different with respect to their search behaviors, i.e., how they update new candidate solutions during the iteration process [
40]. Although these meta-heuristic methods perform well in tackling some challenging real-world problems, they have some disadvantages and their optimization performance still remains to be improved, especially for some inherently high-nonlinear and non-convex problems, such as the economic dispatch (ED) problem [
41]. To overall the drawbacks of these algorithms, hybridization might produce new algorithmic behaviors that are effective in improving the optimization performance of the algorithms.
Manta ray foraging optimization (MRFO) [
42,
43] is a new meta-heuristic algorithm, which simulates the foraging behavior of manta rays in nature. The local exploitation is performed by the chain foraging and somersault foraging behaviors, while the global exploration is performed by the cyclone foraging behavior. This algorithm shows some optimization capabilities and is very successful in applying in some engineering domains, such as geophysics [
44], energy allocation [
45,
46,
47], image processing [
48] and electric power [
49]. These successful applications in the literature confirm MRFO is effective in solving different complex real-world problems. Even though MRFO belongs to a category of meta-heuristic algorithms, it is significantly distinct from other widely employed meta-heuristics in terms of ideology and conception. The major difference between MRFO and PSO is their different biology behaviors. PSO is inspired by the movement of bird flocks or fish schools in nature, whereas MRFO is inspired by the social foraging behaviors of manta rays. Another distinct difference between both is the solution searching mechanism. The solutions in PSO are produced by the combination of the global best solution found thus far and the local best solution, as well as the movement velocity of the individuals; whereas, in MRFO, the solutions are produced by the combination of the global best solution found thus far and the solution in front of it by switching different movement strategies. For a GA and MRFO, both are quite different. A GA is inspired by Darwin’s theory of evolution, which is quite different from the social foraging behaviors of manta rays in MRFO. The second difference is the representation of problem variables. In GAs, the problem variables are encoded in a series of fixed-length bit strings; in MRFO, the problem variables are used directly. Moreover, in GAs, by performing the roulette wheel selection strategy, better solutions have a greater probability of creating new solutions, and worse solutions are probably replaced by new better solutions [
27]. While in MRFO, all the individuals in the population have the same probability of improving their solutions. Although both MRFO and bacterial foraging optimization (BFO) [
50] are swarm-based and bio-inspired meta-heuristic techniques, which model the biology foraging behaviors, there are still some significant differences. The major difference between MRFO and BFO is that the concepts of searching in the foraging behaviors are different. MRFO models three foraging behaviors of manta rays including chain foraging, cyclone foraging and somersault foraging, while BFO models the social foraging behaviors of Escherichia coli, such as chemotaxis, swarming, reproduction and elimination–dispersal. The second difference is that BFO produces new solutions by adding a random direction with a fixed-length step pace, whereas MRFO produces new solutions with respect to the best solution and the solution in front of it. Additionally, in BFO, when updating the solutions, half of the solutions with higher health are reproduced and half of the solutions with lower health are discarded; MRFO accepts new solutions that are better than current solutions. The last difference between both is that BFO uses the health degree of the bacteria as the fitness values of solutions, while MRFO generally uses the function values of the given problems as the fitness values of solutions. It is obvious that BFO and MRFO follow totally different approaches when solving optimization problems.
However, similar to other meta-heuristics, MRFO also suffers from some disadvantages, i.e., premature convergence, trapping into the local optima and weak exploration [
51,
52]. There are many scholars who adopt various methods to enhance the performance of MRFO in the literature. Turgut [
51] integrated the best performing ten chaotic maps into MRFO and proposed a novel chaotic MRFO to the thermal design problem, this improved version can effectively escape the local optima and increase the convergence rate of the algorithm. Calasan et al. [
53] enhanced the optimization ability of the algorithm by integrating the chaotic numbers produced by the Logistic map in MRFO, this variant was used to estimate the transformer parameters. Houssein et al. [
52] proposed an efficient MRFO algorithm by hybridizing opposition-based learning with initialization steps of MRFO, which was used to solve the image segmentation problem. Hassan et al. [
54] solved the economic emission dispatch problems through hybridizing the gradient-based optimizer with MRFO, which may lead to the avoidance of local optima and accelerate the conveyance rate. Elaziz et al. [
55] utilized the heredity and non-locality properties of the Grunwald–Letnikov fractional differ-integral operator to improve the exploitation ability of the algorithm. Elaziz et al. [
56] proposed the modified MRFO based on differential evolution as an effective feature selection approach to identify COVID-19 patients by analyzing their chest images. Jena et al. [
57] introduced a new attacking MRFO algorithm, which was used for the maximum 3D Tsallis entropy based multilevel thresholding of a brain MR image. Yang et al. [
58] devised a hybrid Framework based on MRFO and grey prediction theory to forecast and evaluate the influence of PM10 on public health. Ramadan et al. [
59] used MRFO to search for a feasible configuration of the distribution network to achieve fault-tolerance and fast recovery reliable configurable DN in smart grids. Houssein et al. [
60] used MRFO to extract the PV parameters of single, double and triple-diode models. It shows better abilities to exploit the search space for unimodal problems, but the weak exploration and easily trapping into the local optima for multimodal problems as well as the unbalance between exploration and exploration for hybrid problems are still a few of the major issues.
It can be obvious that it is feasible to design some improved versions of MRFO, and the above implementations are good examples of this capability. However, it seems difficult for these improved versions to simultaneously improve their overall optimization capabilities combined with the shortcomings of the algorithm, such as exploration, exploitation, balance between both and convergence rate. Therefore, it is necessary to conduct some research attempts to establish a comprehensive improvement strategy for effectively tracking complex optimization problems. Based on the investigations mentioned above, a new hybrid model by combining different operators and designing some search strategies to comprehensively enhance the optimization performance of the algorithm is one of the major research attempts. This is the main motivation of this study. An effective optimization method can accurately obtain the parameters of the complex MR damper. These selected parameters have large influences on the output damping force, which gives the damper better hysteretic and dynamic characteristics. Therefore, it has a wide application value in industry and civil fields at home and abroad.
In light of the fact mentioned above, a hybrid MR damper model based on an optimization technique is proposed in this study. To obtain the optimal control parameters of the MR damper, an improved MRFO (IMRFO) combing a searching control factor, an adaptive weight coefficient with the Levy flight and a wavelet mutation are presented. Firstly, based on the analysis for the exploration probability of MRFO, the weak exploration capability of MRFO is promoted by introducing the searching control mechanism, in which a searching control factor is proposed to adaptively adjust the search option according to the number of iterations, promoting the exploration ability of the algorithm. Secondly, the weight coefficient in the cyclone foraging is redefined by combining with the Levy flight; this search mechanism can effectively promote the diversity of search individuals and prevent the premature convergence of local optima. Finally, the Morlet wavelet mutation strategy is employed to dynamically adjust the mutation space by calculating the energy concentration of the wavelet function; this strategy can improve the ability of the algorithm to step out of stagnation and the convergence rate. The effectiveness of the IMRFO is verified on two sets of standard benchmark functions. Additionally, the proposed IMRFO has been applied to optimally identify the control parameters of the MR dampers. The results have been compared with those of other algorithms, demonstrating the superiority of the IMRFO in solving the complex engineering problems.
The novelty points of this study are highlighted below.
In this study, a searching control factor, an adaptive weight coefficient and a wavelet mutation strategy are designed and integrated into MRFO.
The searching control factor proposed is a decreasing time-dependent function with the rand oscillation, it proved to effectively improve the exploration ability of the algorithm.
The adaptive weight coefficient is equipped with the Levy flight, which can adjust the step pace of the individuals having a Levy distribution with the iterations; it strengthens the diversity of search individuals.
The Morlet wavelet mutation utilizes the multi-resolution and energy concentration characteristics of the wavelet function to step out of stagnation and increase the convergence rate of the algorithm.
The Bouc–Wen model is established under various working conditions; the results discover that the IMRFO is more successful than its competitors in identifying the control parameters of the MR models.
The rest of this paper is organized as follows:
Section 2 briefly introduces the basic MRFO, and
Section 3 describes the proposed IMRFO algorithm in detail. The performance analysis of the IMRFO on benchmark functions is provided in
Section 4. The experiment results and analysis for identifying the control parameters of MR dampers are presented in
Section 5.
Section 6 gives the conclusions and suggests a direction for future research.
3. Improved Manta Ray Foraging Optimization (IMRFO)
In MRFO, in the exploitation phase, each individual updates its position with respect to the individual with the best fitness by adjusting the values of α and β, which results in the decrease in the population diversity and stagnation in the local optima; meanwhile, the lack of fine-tuning ability also causes weak solution stability. To overcome these disadvantages, an improved MRFO, named IMRFO, is proposed. In MRFO, the value of t/T is employed to balance exploratory and exploitative searches, and the exploration probability of 0.25 indicates the weak exploration ability of the algorithm; therefore, a searching control factor is proposed in the IMRFO to improve the searching progress and exploration process. To enhance the search efficiency of the algorithm, an adaptive weight coefficient with the Levy flight is introduced in the algorithm, which can maximize the diversification of individuals and maintain the balance between population diversity and concentration. To avoid prematurely converging to local optima and a guaranteed solution stability, the Morlet wavelet mutation with the fine-tuning ability is incorporated into the algorithm.
3.1. Searching Control Factor
In MRFO, in the whole iteration process, there is a probability of 50% to perform the cyclone foraging in which the first half of searches contribute to exploration, according to the value of
t/T. This is, the probability of exploration is only 25% and the relatively low probability happens in the first half of the optimization process, indicating the weak exploration ability of MRFO. In regard to this weak exploration, the searching behavior of MRFO is controlled by the value of
t/T, which increases linearly as the iterations rise; however, in the IMRFO algorithm, the searching ability of the algorithm is controlled by a coefficient,
ps, called the searching control factor, which not only enables the algorithm to perform exploration with high probability in the second half of the optimization process but also makes it possible for the algorithm to perform exploration in the second half of the optimization process. The searching control factor
ps is defined as follows:
where
r is the random number in the interval (0, 1].
Figure 1 gives the time-dependent curve of the searching control factor. When
ps > 0.5, the IMRFO performs exploration; otherwise, the algorithm performs exploitation. Obviously, from
Figure 1, the searching control factor shows a decreasing trend with random oscillation, which also obliges the algorithm to explore the search in the later iteration.
Let
, then
, the probability of
ps > 0.5 is given by the following:
Therefore, the probability of exploration in the IMRFO algorithm is 0.5 × 0.8509 = 0.4254 over the course of optimization.
Figure 2 depicts the schematic diagram of the exploration probability of the algorithm based on the searching control factor
ps. Hence, the global exploration of the algorithm can be improved from 25 to 42.54% through the searching control factor
ps.
3.2. Adaptive Weight Coefficient with Levy Flight
Levy flight, as a simulation for the foraging activities of creatures, has been developed as an efficient search mechanism for an unknown space; therefore, it is widely employed to promote the search efficiency of various meta-heuristics [
61,
62,
63,
64,
65,
66]. In this part, using the fat-tailed characteristic producing numerous short steps punctuated by a few long steps from the Levy flight to construct a non-local random search mechanism, we can improve the search behavior in the cyclone foraging strategy of MRFO, which can effectively promote the diversity of search individuals and prevent the premature convergence of local optima.
The random step length of the Levy flight is offered by the following Levy distribution [
66]:
where
λ is a stability/tail index, and
s is the step length. According to Mantegna’s algorithm [
66], the step length of the Levy flight is given as follows:
where
u and
v obey the normal distribution, respectively. That is:
Γ is the standard Gamma function and the default value of β is set to 1.5.
Therefore, an adaptive weight coefficient with the Levy flight in the cyclone foraging strategy is designed as follows:
Observing Equation (14), on the one hand, the multiple short steps produced frequently by the Levy flight promote the exploitation capacity, while the long steps produced occasionally enhance the exploration capacity, guaranteeing the local optima avoidance of the algorithm; on the other hand,
is a decreasing function with the iterations, depending on the decreasing trend of this function. A larger search scope is provided during the early iterations, while a smaller search scope is provided in the later iterations, this characteristic can promote the search efficiency of the algorithm and prevent the step lengths going out of the boundaries of the variables. The behavior of
βL during two runs with 1000 iterations is demonstrated in
Figure 3.
The cyclone foraging of the IMRFO algorithm can be given as follows:
3.3. Wavelet Mutation Strategy
It is easy for MRFO to trap into local optima, which results in an ineffective search for the global optimum and the instability of solutions. To improve the ability of the algorithm to step out of stagnation and the convergence rate and the stability of solutions, the Morlet wavelet mutation is incorporated into the somersault foraging strategy in the IMRFO algorithm. The wavelet mutation indicates that a dynamic adjustment of the mutation is implemented by combining the translations and dilations of a wavelet function [
66,
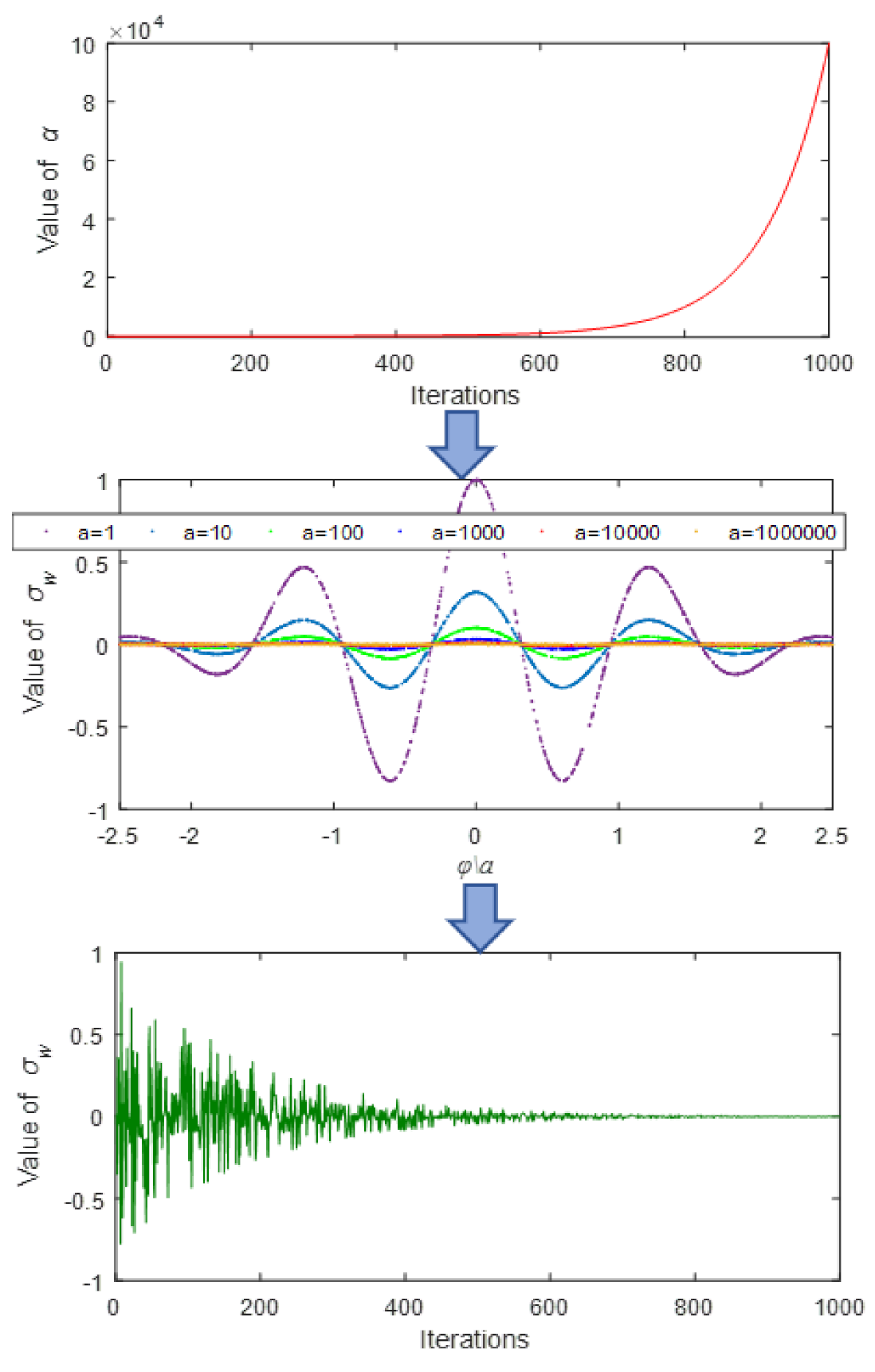
67]. To meet the fine-tuning purpose, the dilation parameters of the wavelet function are controlled to reduce its amplitude, which results in a constrain on the mutation space as the iterations increase.
Assume that
pm is the mutation probability,
r4 is a random number in [0, 1]. By incorporating the wavelet mutation, the somersault foraging strategy is improved by the following:
where
pm is the mutation probability that is set to 0.1, and
σw is the dilation parameters of a wavelet function, which can be given as follows:
where
is the Morlet wavelet function and it is defined as follows:
More than 99% of the total energy of the wavelet function is contained in [−2.5, 2.5]. Thus,
σw can be randomly generated from [−2.5
a, 2.5
a] [
67].
a is the dilation parameter, which increases from 1 to
s as the number of iterations increases. To avoid missing the global optimum, a monotonic increasing function can be given as follows [
67]:
where
g is a constant number that is set to 100,000. The calculation of the Morlet wavelet mutation is visualized in
Figure 4. From
Figure 4, the value of the dilation parameter increases with the decrease in
t, and thus, the amplitude of the Morlet wavelet function is decreased, which gradually reduces the significance of the mutation; this merit can ensure that the algorithm jumps out of local optima and improves the precision of the solutions. Moreover, the overall positive and negative mutations are nearly the same during the iteration process, and this property also ensures good solution stability.
3.4. The Proposed IMRFO Algorithm
In the IMRFO, the improvements for MRFO consist of the following three parts: first, a searching control factor is designed according to a weak exploration ability of MRFO, which can effectively increase the global exploration of the algorithm; second, to prevent the premature convergence of the local optima, an adaptive weight coefficient based on the Levy flight is designed to promote the search efficiency of the algorithm; three, the Morlet wavelet mutation strategy is introduced to the algorithm, in which the mutation space is adaptively adjusted according to the energy concentration of the wavelet function, it is helpful for the algorithm to step out of stagnation and speed up the convergence rate. In the IMRFO, in the somersault foraging, when the condition of r4 < pm is met, the Morlet wavelet mutation strategy is performed. The dilation parameters of a wavelet function σw is calculated according to the position of the individual xi via Equations (18)–(20), and then the position of the individual is updated with respect to the upper boundary or lower boundary of the search space, according to the sign of σw (negative or positive) based on Equation (20). By this means, the Morlet wavelet mutation strategy is well integrated to the algorithm.
The pseudocode of the IMRFO algorithm is given in
Figure 5, and the specific steps are as follows:
Step1: The related parameters of the IMRFO are initialized, such as the size of population, N, the maximum number of iterations, T and the mutation probability, pm.
Step2: The initial population is randomly produced {x1(0), x2(0), …, xN(0)}, the fitness of each individual is evaluated and the best solution x*(0) is restored.
Step3: If t ≤ T, for each individual in the population xi(t), i = 1, …, N, if the condition of rand < 0.5 is met, the searching control factor ps is calculated according to Equation (8).
Step 4: All the individuals are sorted according to their fitness from small to large and the adaptive weight coefficient is calculated according to Equations (10)–(14); if ps < 0.5, the individual position is updated according to Equation (15), otherwise, the individual position is updated according to Equation (16); if the condition of rand < 0.5 is not met, the individual position is updated according to Equation (1).
Step 5: The individual that is out of the boundaries is relocated in the search space; the fitness value for each individual is evaluated and the best solution found thus far, x*(t), is restored.
Step 6: For each individual in the population xi(t), the dilation parameter σw is calculated according to Equations (18)–(20), and the individual position is updated according to Equation (17).
Step 7: The individual that is out of the boundaries is relocated in the search space; the fitness value for each individual is evaluated and the best solution found thus far, x*(t), is restored.
Step 8: If the stop criterion is met, the best solution found thus far, x*(t), is restored; otherwise, set t = t + 1 and go to Step 3.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}