
Shadowed Type-2 Fuzzy Systems for Dynamic Parameter Adaptation in Harmony Search and Differential Evolution for Optimal Design of Fuzzy Controllers

 ,
,  ,
, 

 ,
, 
Abstract
:1. Introduction
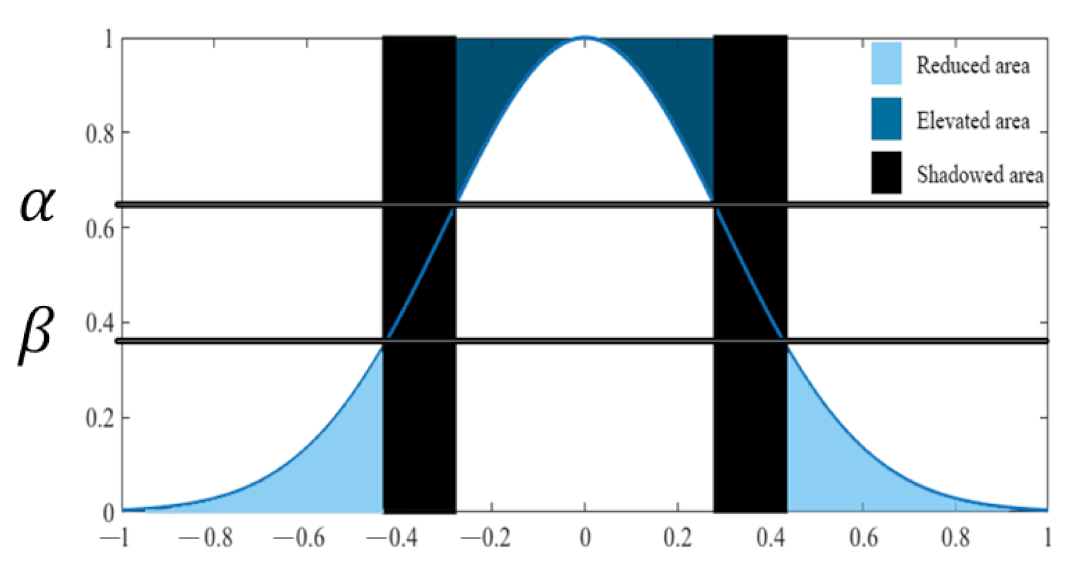
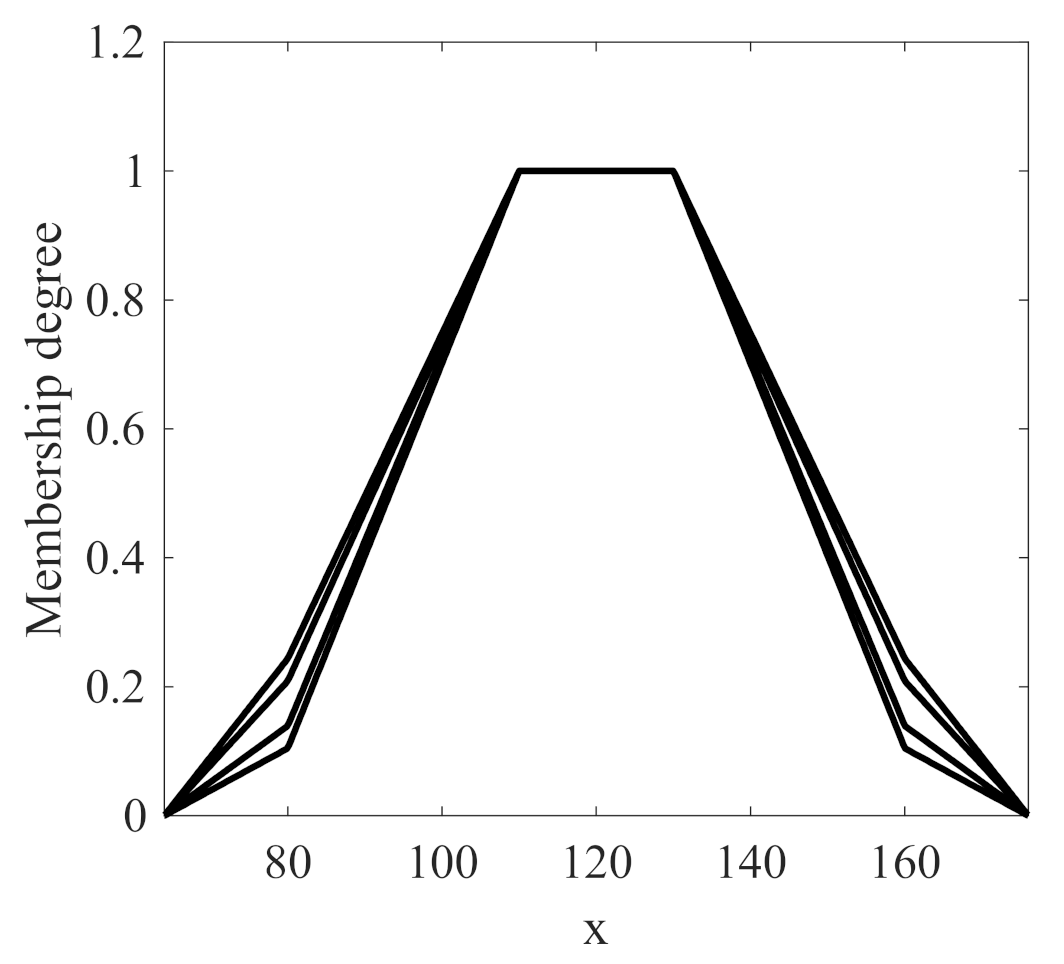
2. Type-2 Fuzzy Systems and Shadowed Sets
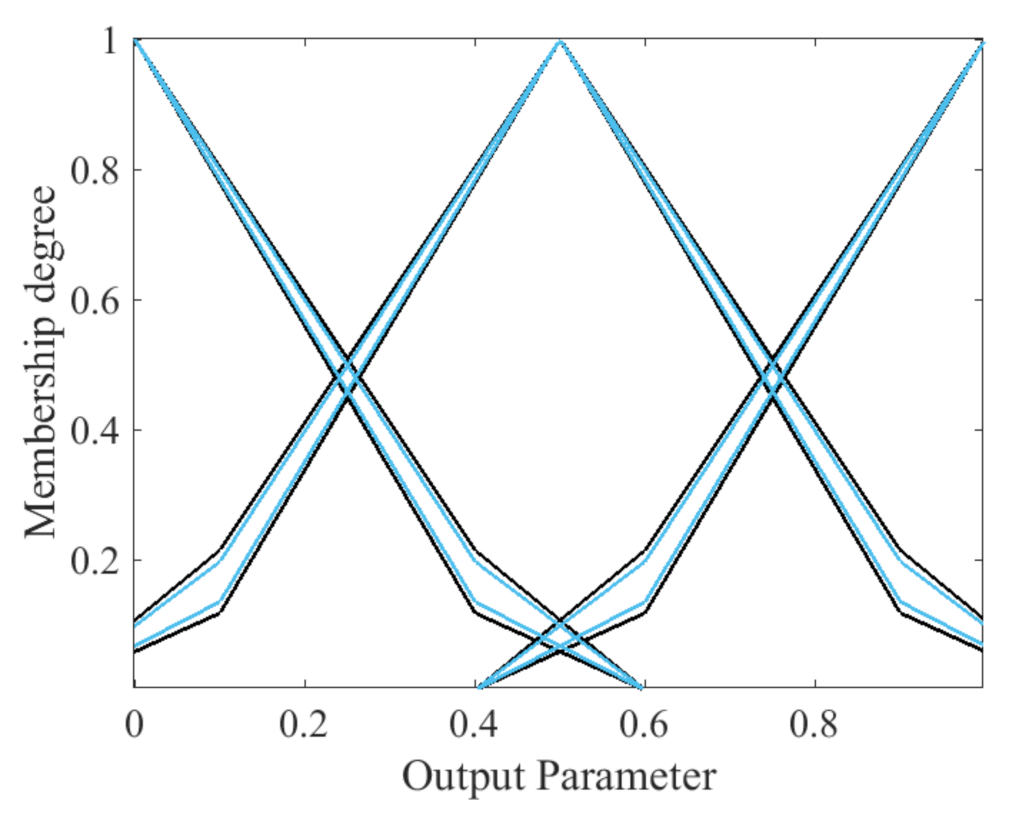
Trapezoidal ST2 MF
3. Metaheuristic Algorithms
3.1. Harmony Search Algorithm
3.2. Differential Evolution Algorithm
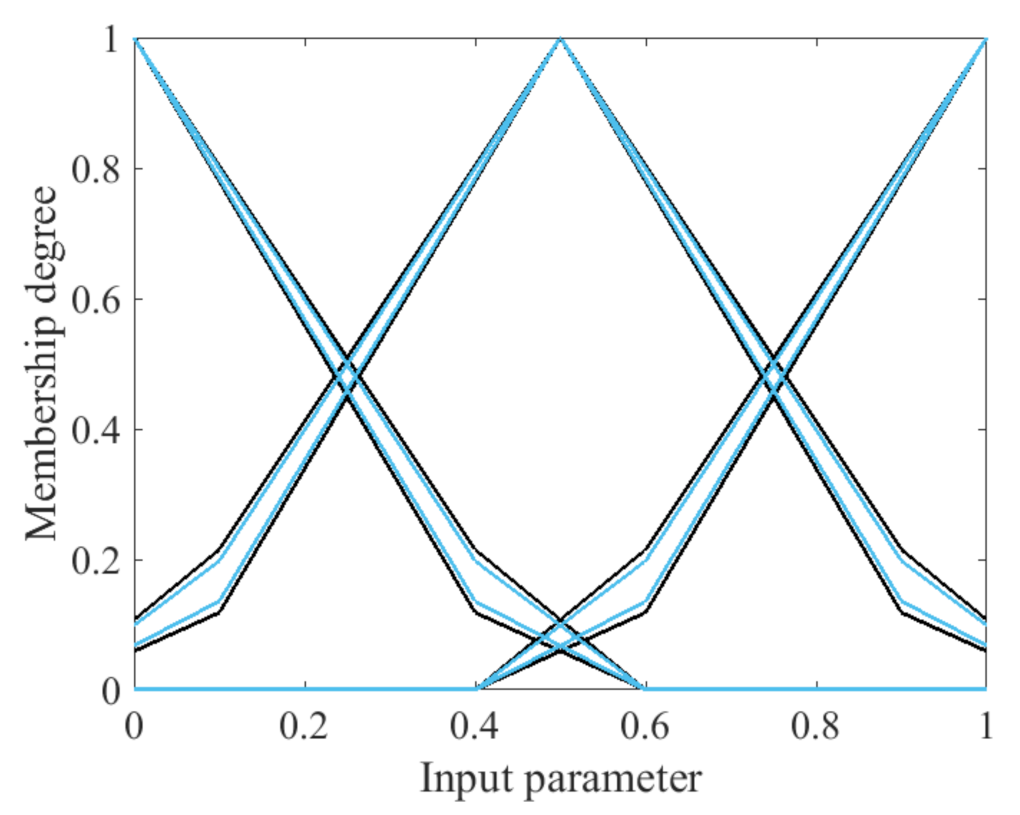
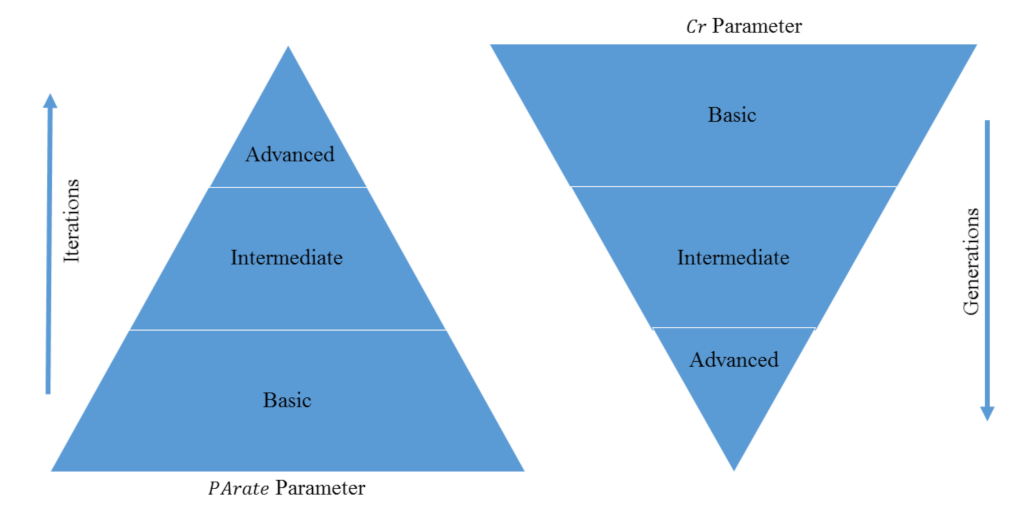
4. Dynamic Parameter Adaptation
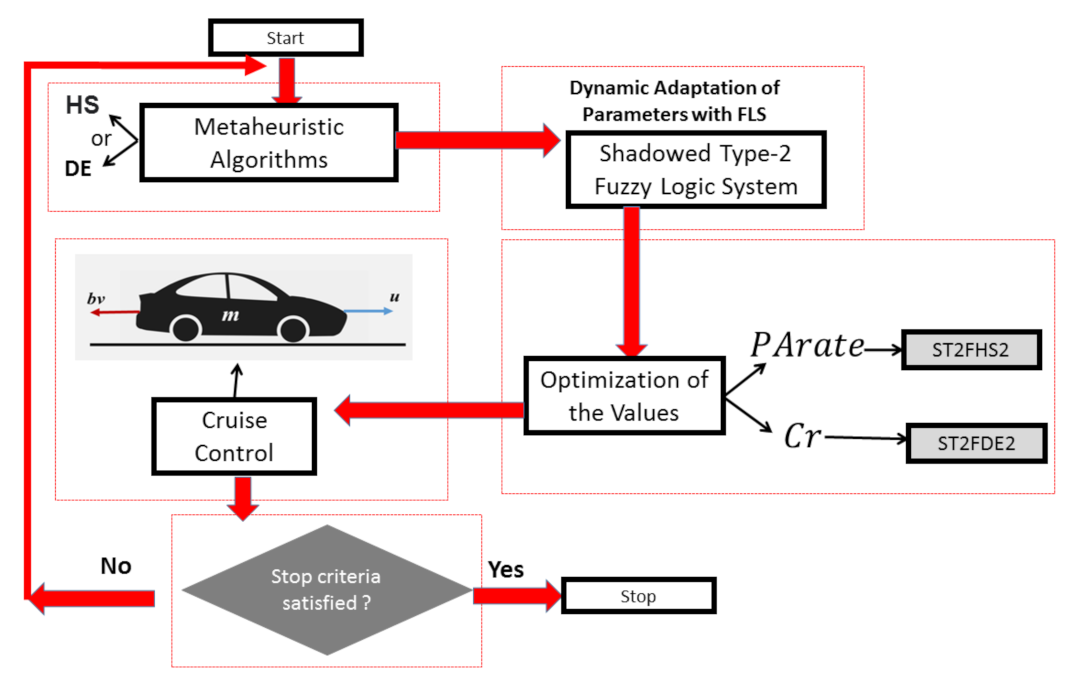
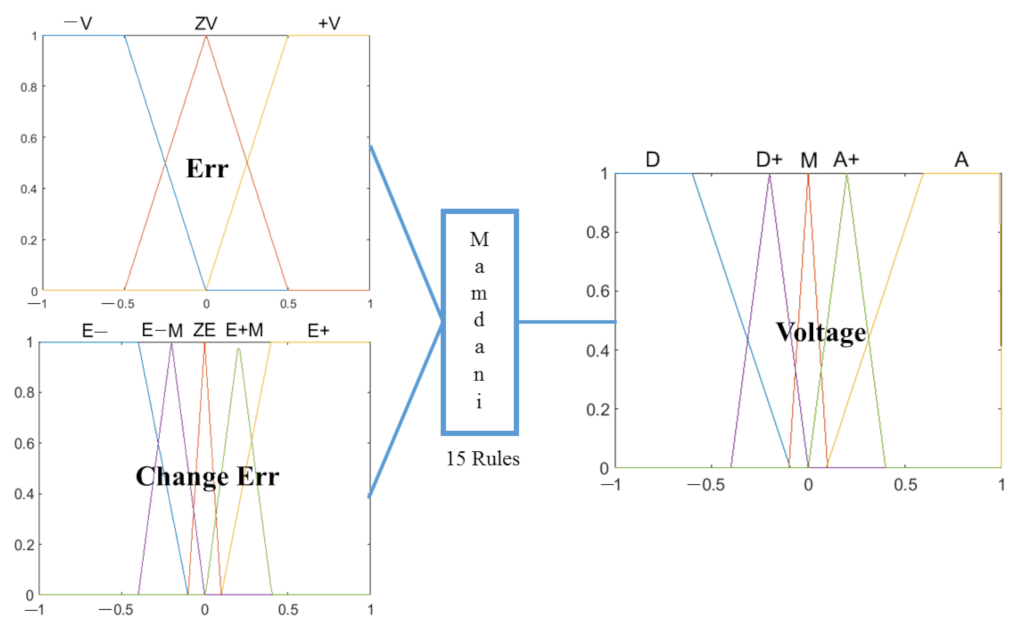
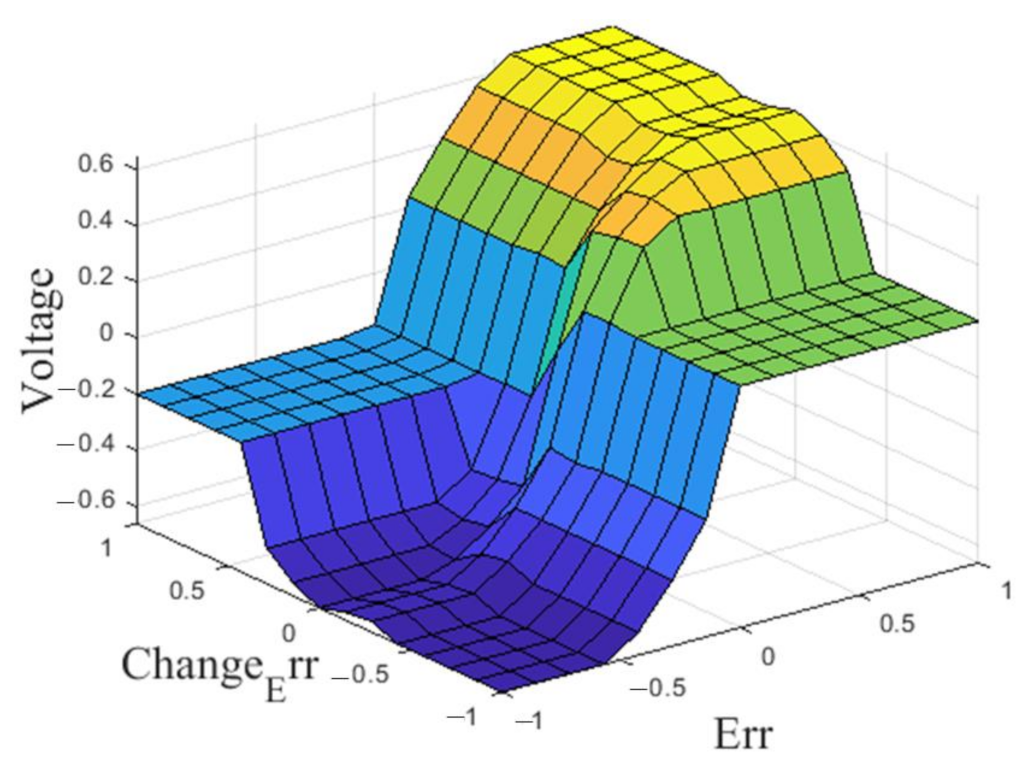
5. Controllers Optimization
5.1. Methodology for Controller Optimization
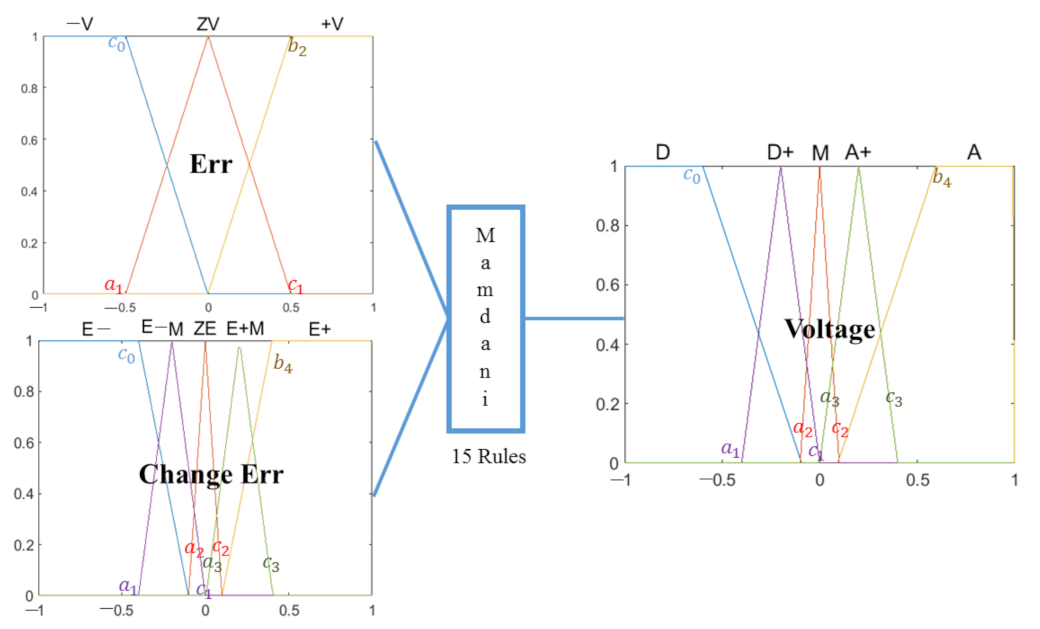
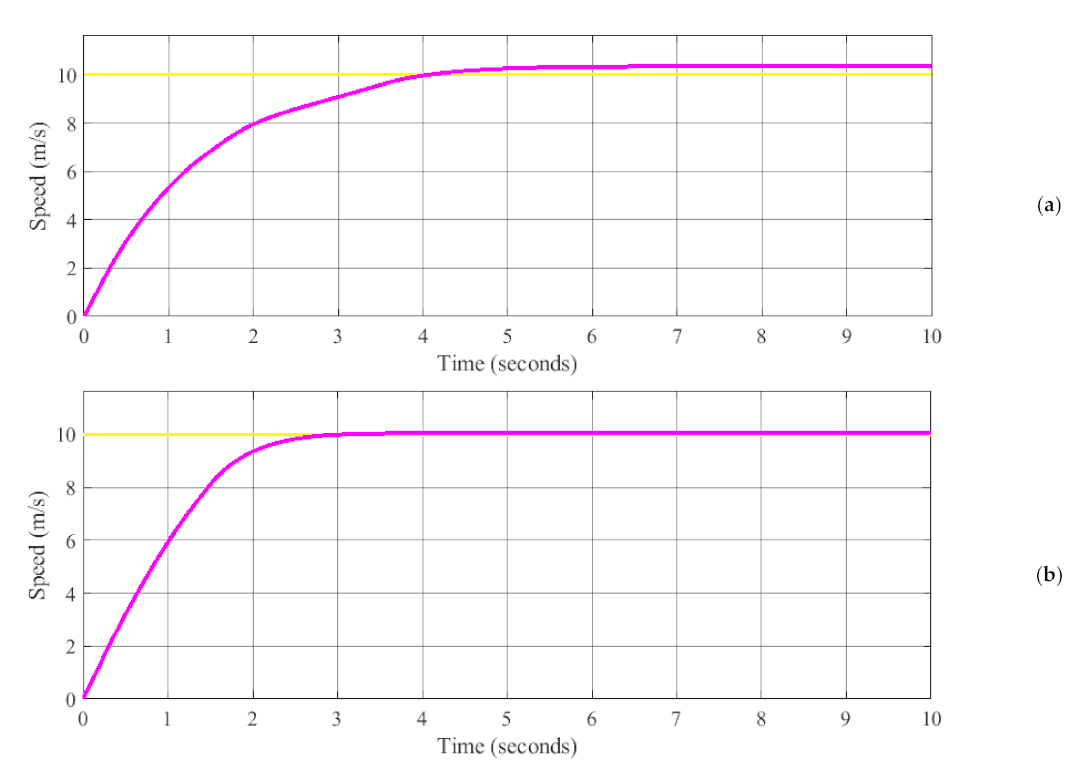
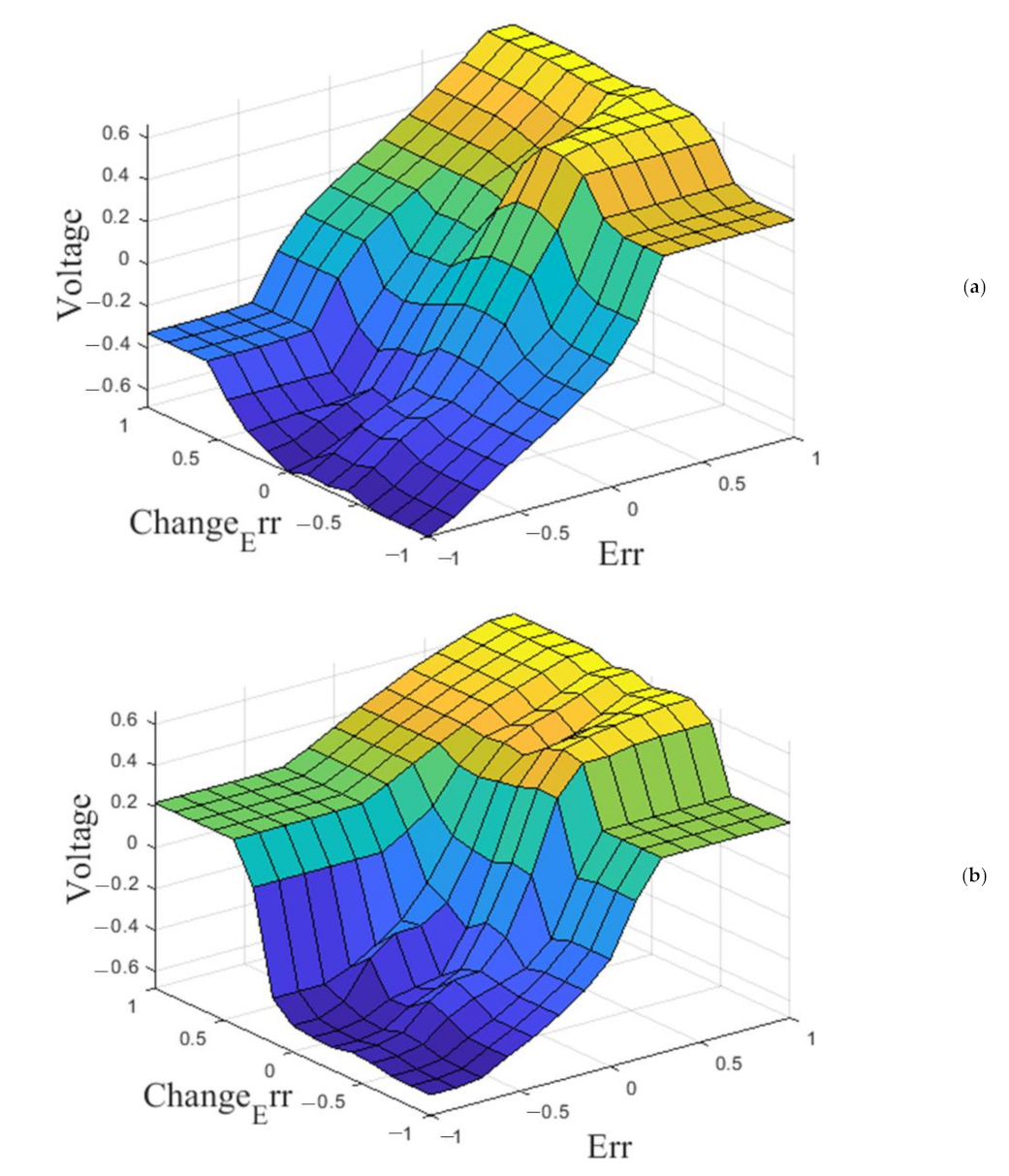
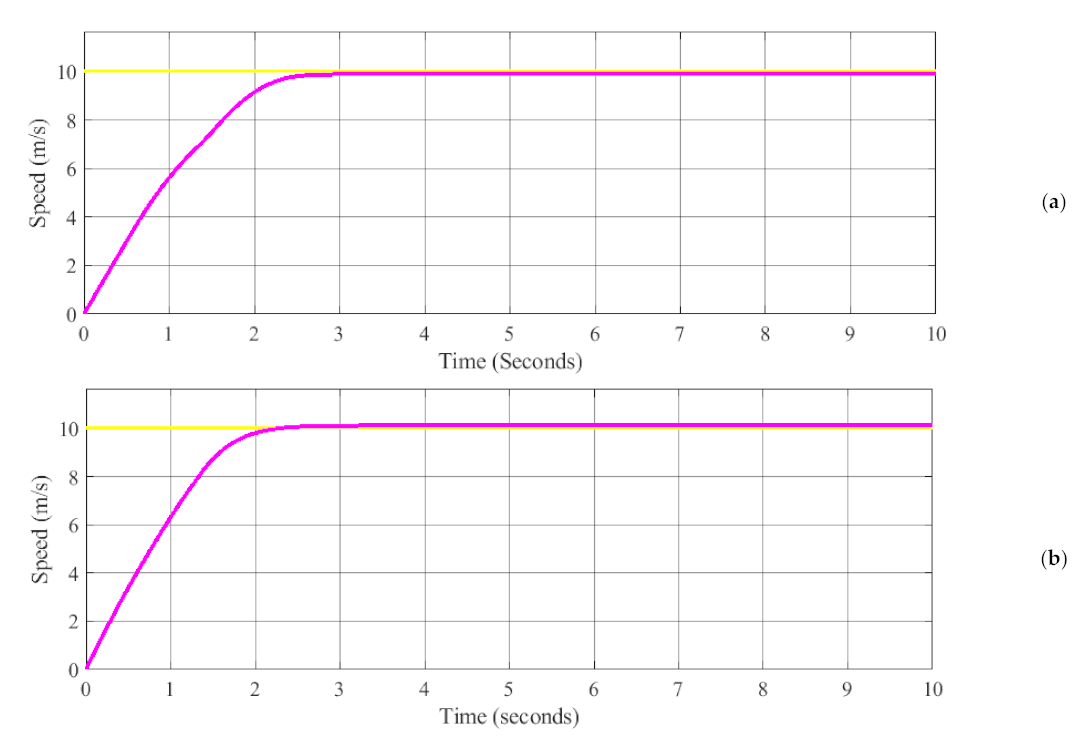
5.2. Cruise Control
5.3. Experiments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Castillo, O.; Valdez, F.; Soria, J.; Yoon, J.H.; Geem, Z.W.; Peraza, C.; Amador-Angulo, L. Optimal Design of Fuzzy Systems Using Differential Evolution and Harmony Search Algorithms with Dynamic Parameter Adaptation. Appl. Sci. 2020, 10, 6146. [Google Scholar] [CrossRef]
- Castillo, O.; Melin, P.; Valdez, F.; Soria, J.; Ontiveros-Robles, E.; Peraza, C.; Ochoa, P. Shadowed type-2 fuzzy systems for dynamic parameter adaptation in harmony search and differential evolution algorithms. Algorithms 2019, 12, 17. [Google Scholar] [CrossRef] [Green Version]
- Castillo, O.; Valdez, F.; Soria, J.; Amador-Angulo, L.; Ochoa, P.; Peraza, C. Comparative study in fuzzy controller optimization using bee colony, differential evolution, and harmony search algorithms. Algorithms 2019, 12, 9. [Google Scholar] [CrossRef] [Green Version]
- Castillo, O.; Melin, P.; Ontiveros, E.; Peraza, C.; Ochoa, P.; Valdez, F.; Soria, J. A high-speed interval type 2 fuzzy system approach for dynamic parameter adaptation in metaheuristics. Eng. Appl. Artif. Intell. 2019, 85, 666–680. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Castillo, O.; Band, S.S.; Mosavi, A. A Novel Fractional-Order Multiple-Model Type-3 Fuzzy Control for Nonlinear Systems with Unmodeled Dynamics. Int. J. Fuzzy Syst. 2021, 1–19. [Google Scholar] [CrossRef]
- Castillo, O.; Valdez, F.; Peraza, C.; Yoon, J.H.; Geem, Z.W. High-Speed Interval Type-2 Fuzzy Systems for Dynamic Parameter Adaptation in Harmony Search for Optimal Design of Fuzzy Controllers. Mathematics 2021, 9, 758. [Google Scholar] [CrossRef]
- Bernal, E.; Lagunes, M.L.; Castillo, O.; Soria, J.; Valdez, F. Optimization of type-2 fuzzy logic controller design using the GSO and FA algorithms. Int. J. Fuzzy Syst. 2021, 23, 42–57. [Google Scholar] [CrossRef]
- Mohammedali, M.N.; Rasheed, M.; Shihab, S.; Rashid, T.; Hamed, S.H.A. Optimal Parameters Estimation of Silicon Solar Cell Using Fuzzy Logic: Analytical Method. J. Al-Qadisiyah Comput. Sci. Math. 2021, 13, 22. [Google Scholar]
- Yadav, R.S. Application of soft computing techniques to calculation of medicine dose during the treatment of patient: A fuzzy logic approach. In Handbook of Computational Intelligence in Biomedical Engineering and Healthcare; Academic Press: Cambridge, MA, USA, 2021; pp. 151–178. [Google Scholar]
- Hossain, M.A.; Hossain, M.S. Mathematical Approach to Identify Coronavirus Disease (COVID-19) Using Fuzzy Logic Inference System. Int. J. Fuzzy Math. Arch. 2021, 19, 37–47. [Google Scholar]
- Sandal, B.; Hacioglu, Y.; Salihoglu, Z.; Yagiz, N. Fuzzy Logic Preanesthetic Risk Evaluation of Laparoscopic Cholecystectomy Operations. Am. Surg. 2021, 1–10. [Google Scholar] [CrossRef]
- Choudhury, B.S.; Dhara, P.S.; Saha, P. An application of fuzzy logic on importing medicines. Int. J. Healthc. Manag. 2021, 14, 456–461. [Google Scholar] [CrossRef]
- Khalil, J.; Labib, A.W. On the optimization of maintenance storage cost in industry a fuzzy logic application. Int. J. Qual. Reliab. Manag. 2021. [Google Scholar] [CrossRef]
- Kumar, P.M.; Babu, G.C.; Selvaraj, A.; Raza, M.; Luhach, A.K.; Díaz, V.G. Multi-criteria-based approach for job scheduling in industry 4.0 in smart cities using fuzzy logic. Soft Comput. 2021, 25, 1–16. [Google Scholar] [CrossRef]
- Caiado, R.G.G.; Scavarda, L.F.; Gavião, L.O.; Ivson, P.; De Mattos Nascimento, D.L.; Garza-Reyes, J.A. A fuzzy rule-based industry 4.0 maturity model for operations and supply chain management. Int. J. Prod. Econ. 2021, 231, 107883. [Google Scholar] [CrossRef]
- BİLGİÇ, H.; Kuvvetli, Y.; Baykal, P.D. Determination of Difficulty Level for Garment Model with Fuzzy Logic Method. Tekst.Ve Mühendis 2021, 28, 39–47. [Google Scholar] [CrossRef]
- Türk, S.; Deveci, M.; Özcan, E.; Canıtez, F.; John, R. Interval type-2 fuzzy sets improved by Simulated Annealing for locating the electric charging stations. Inf. Sci. 2021, 547, 641–666. [Google Scholar] [CrossRef]
- Abbasi, M.; Abbasi, E.; Mohammadi-Ivatloo, B. Single and multi-objective optimal power flow using a new differential-based harmony search algorithm. J. Ambient. Intell. Humaniz. Comput. 2021, 12, 851–871. [Google Scholar] [CrossRef]
- Srikanth, R.; Bikshalu, K. Multilevel thresholding image segmentation based on energy curve with harmony Search Algorithm. Ain Shams Eng. J. 2021, 12, 1–20. [Google Scholar] [CrossRef]
- Mahafzah, B.A.; Alshraideh, M. Hybrid harmony search algorithm for social network contact tracing of COVID-19. Soft Comput. 2021, 1–23. [Google Scholar] [CrossRef]
- Abualigah, L.; Diabat, A.; Geem, Z.W. A comprehensive survey of the harmony search algorithm in clustering applications. Appl. Sci. 2020, 10, 3827. [Google Scholar] [CrossRef]
- Ahmed, S.; Ghosh, K.K.; Singh, P.K.; Geem, Z.W.; Sarkar, R. Hybrid of harmony search algorithm and ring theory-based evolutionary algorithm for feature selection. IEEE Access 2020, 8, 102629–102645. [Google Scholar] [CrossRef]
- Hasanipanah, M.; Keshtegar, B.; Thai, D.K.; Troung, N.T. An ANN-adaptive dynamical harmony search algorithm to approximate the flyrock resulting from blasting. Eng. Comput. 2020, 1–13. [Google Scholar] [CrossRef]
- Xin, Y.; Yi, J.; Zhang, K.; Chen, C.; Xiong, J. Offline selective harmonic elimination with (2N+1) output voltage levels in modular multilevel converter using a differential harmony search algorithm. IEEE Access 2020, 8, 121596–121610. [Google Scholar] [CrossRef]
- Shiva, C.K.; Kumar, R. Quasi-oppositional harmony search algorithm approach for Ad Hoc and Sensor networks. In Nature Inspired Computing for Wireless Sensor Networks; Springer: Singapore, 2020; pp. 175–194. [Google Scholar]
- M’zoughi, F.; Garrido, I.; Garrido, A.J.; De La Sen, M. Self-adaptive global-best harmony search algorithm-based airflow control of a wells-turbine-based oscillating-water column. Appl. Sci. 2020, 10, 4628. [Google Scholar] [CrossRef]
- Tuo, S.; Liu, H.; Chen, H. Multipopulation harmony search algorithm for the detection of high-order SNP interactions. Bioinformatics 2020, 36, 4389–4398. [Google Scholar] [CrossRef]
- Bae, J.H.; Kim, M.; Lim, J.S.; Geem, Z.W. Feature Selection for Colon Cancer Detection Using K-Means Clustering and Modified Harmony Search Algorithm. Mathematics 2021, 9, 570. [Google Scholar] [CrossRef]
- Gholami, J.; Pourpanah, F.; Wang, X. Feature selection based on improved binary global harmony search for data classification. Appl. Soft Comput. 2020, 93, 106402. [Google Scholar] [CrossRef]
- Agajie, T.F.; Khan, B.; Alhelou, H.H.; Mahela, O.P. Optimal expansion planning of distribution system using grid-based multi-objective harmony search algorithm. Comput. Electr. Eng. 2020, 87, 106823. [Google Scholar] [CrossRef]
- Koti, P.; Dhavachelvan, P.; Kalaipriyan, T.; Arjunan, S.; Uthayakumar, J.; Sujatha, P. An efficient healthcare framework for kidney disease using hybrid harmony search algorithm. Electron. Gov. Int. J. 2020, 16, 56–68. [Google Scholar] [CrossRef]
- Degertekin, O. Optimum design of steel frames using harmony search algorithm. Struct. Multidiscip. Optim. 2008, 36, 393–401. [Google Scholar] [CrossRef]
- Gao, Z.; Suganthan, P.N.; Pan, Q.K.; Chua, T.J.; Cai, T.X.; Chong, C.S. Discreet harmony search algorithm for flexible job shop scheduling problem with multiple objectives. J. Intell. Manuf. 2016, 27, 363–374. [Google Scholar] [CrossRef]
- Tsakirakis, E.; Marinaki, M.; Marinakis, Y.; Matsatsinis, N. A similarity hybrid harmony search algorithm for the Team Orienteering problem. Appl. Soft Comput. 2019, 80, 776–796. [Google Scholar] [CrossRef]
- Deng, W.; Xu, J.; Song, Y.; Zhao, H. Differential evolution algorithm with wavelet basis function and optimal mutation strategy for complex optimization problem. Appl. Soft Comput. 2021, 100, 106724. [Google Scholar] [CrossRef]
- Deng, W.; Shang, S.; Cai, X.; Zhao, H.; Song, Y.; Xu, J. An improved differential evolution algorithm and its application in optimization problem. Soft Comput. 2021, 25, 5277–5298. [Google Scholar] [CrossRef]
- Nabavi, M.; Elveny, M.; Danshina, S.D.; Behroyan, I.; Babanezhad, M. Velocity prediction of Cu/water nanofluid convective flow in a circular tube: Learning CFD data by differential evolution algorithm based fuzzy inference system (DEFIS). Int. Commun. Heat Mass Transf. 2021, 126, 105373. [Google Scholar] [CrossRef]
- Houssein, E.H.; Mahdy, M.A.; Blondin, M.J.; Shebl, D.; Mohamed, W.M. Hybrid slime mould algorithm with adaptive guided differential evolution algorithm for combinatorial and global optimization problems. Expert Syst. Appl. 2021, 174, 114689. [Google Scholar] [CrossRef]
- Ahmadianfar, I.; Kheyrandish, A.; Jamei, M.; Gharabaghi, B. Optimizing operating rules for multi-reservoir hydropower generation systems. Adapt. Hybrid Differ. Evol. Algorithm Renew. Energy 2021, 167, 774–790. [Google Scholar]
- Houssein, E.H.; Mahdy, M.A.; Eldin, M.G.; Shebl, D.; Mohamed, W.M.; Abdel-Aty, M. Optimizing quantum cloning circuit parameters based on adaptive guided differential evolution algorithm. J. Adv. Res. 2021, 29, 147–157. [Google Scholar] [CrossRef]
- Deng, W.; Liu, H.; Xu, J.; Zhao, H.; Song, Y. An improved quantum-inspired differential evolution algorithm for deep belief network. IEEE Trans. Instrum. Meas. 2020, 69, 7319–7327. [Google Scholar] [CrossRef]
- Sallam, K.M.; Elsayed, S.M.; Chakrabortty, R.K.; Ryan, M.J. Improved multi-operator differential evolution algorithm for solving unconstrained problems. In 2020 IEEE Congress on Evolutionary Computation (CEC); IEEE: Piscataway, NJ, USA, 2020; pp. 1–8. [Google Scholar]
- Ochoa, P.; Castillo, O.; Soria, J. Optimization of fuzzy controller design using a differential evolution algorithm with dynamic parameter adaptation based on type-1 and interval type-2 fuzzy systems. Soft Comput. 2020, 24, 193–214. [Google Scholar] [CrossRef]
- Guedria, N.B. An accelerated differential evolution algorithm with new operators for multi-damage detection in plate-like structures. Appl. Math. Model. 2020, 80, 366–383. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Coupland, S.; John, R. Geometric Type-1 and Type-2 Fuzzy Logic Systems. IEEE Trans. Fuzzy Syst. 2007, 15, 3–15. [Google Scholar] [CrossRef]
- Wagner, C.; Hagras, H. Toward General Type-2 Fuzzy Logic Systems Based on zSlices. IEEE Trans. Fuzzy Syst. 2010, 18, 637–660. [Google Scholar] [CrossRef]
- Mendel, J.M.; Liu, F.; Zhai, D. Alpha-Plane Representation for Type-2 Fuzzy Sets: Theory and Applications. IEEE Trans. Fuzzy Syst. 2009, 17, 1189–1207. [Google Scholar] [CrossRef]
- Mendel, J.M.; John, R.I.; Liu, F. Interval Type-2 Fuzzy Logic Systems Made Simple. IEEE Trans. Fuzzy Syst. 2006, 14, 808–821. [Google Scholar] [CrossRef] [Green Version]
- Pedrycz, W. Shadowed sets: Representing and processing fuzzy sets. IEEE Trans. Syst. Man Cybern. Part B Cybern. 1998, 28, 103–109. [Google Scholar] [CrossRef] [PubMed]
- Pedrycz, W. From fuzzy sets to shadowed sets: Interpretation and computing. Int. J. Intell. Syst. 2009, 24, 48–61. [Google Scholar] [CrossRef]
- Wijayasekara, D.; Linda, O.; Manic, M. Shadowed Type-2 Fuzzy Logic Systems. In 2013 IEEE Symposium on Advances in Type-2 Fuzzy Logic Systems (T2FUZZ); IEEE: Piscataway, NJ, USA, 2013; pp. 15–22. [Google Scholar]
- Zhang, T.; Geem, Z.W. Review of Harmony Search with Respect to Algorithm Structure. Swarm Evol. Comput. 2019, 48, 31–43. [Google Scholar] [CrossRef]
- Tang, L.; Zhao, Y.; Liu, J. An Improved Differential Evolution Algorithm for Practical Dynamic Scheduling in Steelmaking-Continuous Casting Production. IEEE Trans. Evol. Comput. 2014, 18, 209–225. [Google Scholar] [CrossRef]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A New Heuristic Optimization Algorithm: Harmony Search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Ochoa, P.; Castillo, O.; Soria, J. Differential Evolution with Dynamic Adaptation of Parameters for the Optimization of Fuzzy Controllers. In Recent Advances on Hybrid, Approaches for Designing Intelligent Systems; Springer: Cham, Switzerland, 2014; pp. 275–288. [Google Scholar]
- MATLAB. Version 7.10.0 (R2013a); The MathWorks Inc.: Natick, MA, USA, 2013. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Recent Studies/Authors | Method Used | Objective of the Article | Study Case | Meta-Heuristics Used |
|---|---|---|---|---|
| Proposed Method | Shadowed Type-2 Fuzzy Systems | Find optimal parameters in the studied algorithms. | Fuzzy controllers: Cruise control | Harmony Search and Differential Evolution |
| Castillo O. et al. [2] | Shadowed type-2 fuzzy systems | Find an optimal parameters of the studied algorithms. | Fuzzy controller: DC motor | Harmony Search and Differential Evolution |
| Mohammadzadeh, A. et al. [5] | Type-3 Fuzzy Control | Find an optimal dynamic model in a period of time short and the control signal is designed based on this model. | Nonlinear systems: DC motors | Not Applied |
| Bernal, E. et al. [7] | Type-2 Fuzzy Logic System | Finding the best method that generates an optimal vector of values for the membership function. | Fuzzy controller: path tracking of an autonomous mobile robot | firefly algorithm and galactic swarm optimization |
| Türk, S. [17] | Interval type-2 Fuzzy Sets | Find the best configuration of the parameters of the interval type-2 membership functions for locating the electric charging stations. | Applied to a real-world public transport problem | Not Applied |
| Ochoa, P. et al. [43] | Interval Type-2 Fuzzy Logic System | Find an optimal parameters of the algorithms studied. | Fuzzy controllers | Differential Evolution Algorithm |
| Wagner, C. et al. [47] | General Type-2 Fuzzy Logic Systems Based on zSlices | Reduction in the computational time with high levels of uncertainties. | Fuzzy controller: a two-wheeled mobile robot | Not Applied |
| Mendel, J.M. et al. [49] | Alpha-Plane Representation for Type-2 Fuzzy Sets | Find the precision to forecast noise-corrupted measurements. | Time series: a chaotic Mackey-Glass | Not Applied |
| Pedrycz, W. [50] | Shadowed Sets | Demonstrate how shadowed sets help in problems in data interpretation in fuzzy clustering. | Fuzzy clustering | Not Applied |
| Wijayasekara, D. et al. [52]. | Shadowed Type-2 Fuzzy Logic Systems | Outlines a novel concept of shadowed type-2 fuzzy logic systems (ST2 FLS). | Explanation of important theory | Not Applied |
| Input Err | ||||
| MF | a | b | c | d |
| V | 1 | 1 | 0.5 | 0 |
| ZV | 0.5 | 0 | 0.5 | |
| +V | 0 | 0.5 | 1 | 1 |
| Input Change Err | ||||
| E | 1 | 1 | 0.4 | 0.1 |
| EM | 0.4 | 0.2 | 0 | |
| ZE | 0.01 | 0 | 0.10 | |
| E+M | 0 | 0.2 | 0.4 | |
| E+ | 0.1 | 0.4 | 1 | 1 |
| Output Voltage | ||||
| D | 1 | 1 | 0.6 | 0.09 |
| D+ | 0.4 | 0.2 | 0 | |
| M | 0.1 | 0 | 0.1 | |
| A+ | 0 | 0.2 | 0.4 | |
| A | 0.09 | 0.6 | 1 | 1 |
| Rules | Inputs | Output | |
|---|---|---|---|
| Err | Change Err | Voltage | |
| 1 | V | D | |
| 2 | V | ZE | D |
| 3 | V | E+ | D+ |
| 4 | Zv | A+ | |
| 5 | ZV | E+ | D+ |
| 6 | +V | A+ | |
| 7 | +V | ZE | A |
| 8 | +V | E+ | A |
| 9 | ZV | ZE | M |
| 10 | V | M | D |
| 11 | ZV | M | A+ |
| 12 | +V | M | A |
| 13 | +V | E+M | A |
| 14 | ZV | E+M | D+ |
| 15 | V | E+M | D |
| Err | Change Err | Voltage |
|---|---|---|
| V | D | |
| E − M | D+ | |
| ZV | ZE | M |
| E+M
| A+
| |
| +V | E+ | A |
| Parameter | Description | Value |
|---|---|---|
| m | Vehicle mass | 1000 kg |
| b | Damping coefficient | 50 N·s/m |
| r | Reference speed | 10 m/s |
| u | Force on the vehicle | 500 N |
| Method | HS-FLC without Noise | ST2FHS2-FLC without Noise | HS- FLC with Noise | ST2FHS2-FLC FLC with Noise |
|---|---|---|---|---|
| Best | ||||
| Worst | ||||
| Average | ||||
| Std. | ||||
| -value | ||||
| Method | DE- FLC without Noise | ST2FDE2-FLC without Noise | DE -FLC with Noise | ST2FDE2 -FLC with Noise |
|---|---|---|---|---|
| Best | ||||
| Worst | ||||
| Average | ||||
| Std. | ||||
| -value | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castillo, O.; Peraza, C.; Ochoa, P.; Amador-Angulo, L.; Melin, P.; Park, Y.; Geem, Z.W. Shadowed Type-2 Fuzzy Systems for Dynamic Parameter Adaptation in Harmony Search and Differential Evolution for Optimal Design of Fuzzy Controllers. Mathematics 2021, 9, 2439. https://doi.org/10.3390/math9192439
Castillo O, Peraza C, Ochoa P, Amador-Angulo L, Melin P, Park Y, Geem ZW. Shadowed Type-2 Fuzzy Systems for Dynamic Parameter Adaptation in Harmony Search and Differential Evolution for Optimal Design of Fuzzy Controllers. Mathematics. 2021; 9(19):2439. https://doi.org/10.3390/math9192439
Chicago/Turabian StyleCastillo, Oscar, Cinthia Peraza, Patricia Ochoa, Leticia Amador-Angulo, Patricia Melin, Yongjin Park, and Zong Woo Geem. 2021. "Shadowed Type-2 Fuzzy Systems for Dynamic Parameter Adaptation in Harmony Search and Differential Evolution for Optimal Design of Fuzzy Controllers" Mathematics 9, no. 19: 2439. https://doi.org/10.3390/math9192439
APA StyleCastillo, O., Peraza, C., Ochoa, P., Amador-Angulo, L., Melin, P., Park, Y., & Geem, Z. W. (2021). Shadowed Type-2 Fuzzy Systems for Dynamic Parameter Adaptation in Harmony Search and Differential Evolution for Optimal Design of Fuzzy Controllers. Mathematics, 9(19), 2439. https://doi.org/10.3390/math9192439