1. Introduction
Queueing models that take into account customer behavior after being refused service provide a powerful tool for performance evaluation and the planning of many resource-sharing systems functioning in overload conditions. Such tasks often can be witnessed in the telecommunication industry where, by definition, the volume of resource is restricted, and input traffic has random characteristics. The proper solution of such a problem has special significance, especially in emergency situations, which are very common. Modern telecommunication equipment allows people to ask for assistance at any time and from almost anywhere. Technically, such types of connection are organized through public-safety answering points (PSAP) [
1,
2]. PSAP is the basis of public-safety systems because it allows a citizen to reach primary emergency services such as police, fire- fighting, ambulance, etc. and provide the required intervention resources if necessary. Because of this, the functioning of PSAP should be organized very carefully.
Using PSAP as an example, let us consider the problems related to an overload of calls and possible solutions. Under normal traffic conditions, it is easy to predict the parameters for an emergency service such as the intensity of arriving calls for each period of the day, and estimate the number of operators required to serve the incoming calls. This problem can be solved by available planning tools based on standard queueing models. However, all emergency services are exposed to overloading situations caused by both natural (earthquakes, floods) and human (fires, terrorist attacks, nuclear accidents) factors [
1,
2]. The vast majority of citizens seeing or suffering the same incident try to reach emergency services almost at the same time, creating conditions for overload. This situation leads to blocking and the subsequent appearance of a large number of repeated attempts, easily created by modern mobile phones equipped with a call-retrial function.
There are two approaches to overcome the negative consequences of overload. The choice depends on the origin of overload and the time needed to solve the problem. If the rising traffic has random characteristics and is caused by some dangerous event, then, to keep the emergency service in normal order, it is necessary to reduce the number of expected requests. This can be done by redirecting some calls to another PSAP with similar functions [
1]. After a short period, the intensity of traffic is stabilized. The increase of input flow can be also caused by the involvement of additional customers. In this situation, it is necessary to estimate the intensity of primary requests from results of measurements of total intensity of incoming requests (primary and repeated), and then calculate the required number of operators. The portion of redirected calls and the number of additional operators can be calculated with help of corresponding mathematical models, taking into account the possibility of call repetition due to the nonavailability of required resources.
Moreover, evident interest from researchers dealing with planning and optimizing the infrastructure of such emergency service models has generated a lot of attention from analysts dealing with call and contact centers, and other resource-sharing systems functioning in overload situations. Attracted by the relevance of the issues, specialists of various expertise work in this area. The level of publications varies from practitioner-oriented research (see overview in [
3]) to works performed at a high mathematical level (see overview in [
4,
5]). A survey of the latest research in this field can be found in [
6]. The main point of interest for specialists working on queueing models concerning call centers is to estimate the number of agents such that the values of SLA (Service Level Agreement) indicators are met with prescribed values. In the process of model construction, it is commonly assumed that requests for servicing can be well modeled by nonhomogeneous Poisson process [
4,
5,
6,
7,
8]. Additionally, it is also supposed that arrival rates and the number of agents are stepwise constant functions [
6]. It allows the use of stationary queueing models for each time interval for solving planning problems by so-called SIPP procedure [
8]. The
is very often used in practice, especially as a basis for different forms of call-center calculators [
5]. This model can be generalized by taking into account the user patience [
9,
10]. Such models can be written as
, where symbol
G denotes the generally distributed user patience. Analytical results have been obtained for such type of models that allow us to study the influence of user patience on performance measurements. Another way to increase the accuracy of the call-center model is to take into account different aspects of agent stuffing. Often this feature complicates the model and in this case the only way to calculate the performance measurements is to solve the system of state equation using the Gauss–Seidel iterative algorithm [
11].
A family of Erlang models, integrated into a SIPP procedure, forms the basis of numerical methods of estimation the required number of agents. Unfortunately, this approach has several drawbacks. The main among them is the dependence on the intensity of requests that arrive at the beginning of each interval carried over from the previous call-center functioning history, the so-called backlog [
6,
12]. This property violates the Poisson assumption used for the description of input flow. There are several approaches to dealing with this problem; see for example [
12]. A substantial contribution to the formation of a backlog, especially in the case of overload, is repeated attempts that reflect the quality of request servicing has been observed in the past [
13].
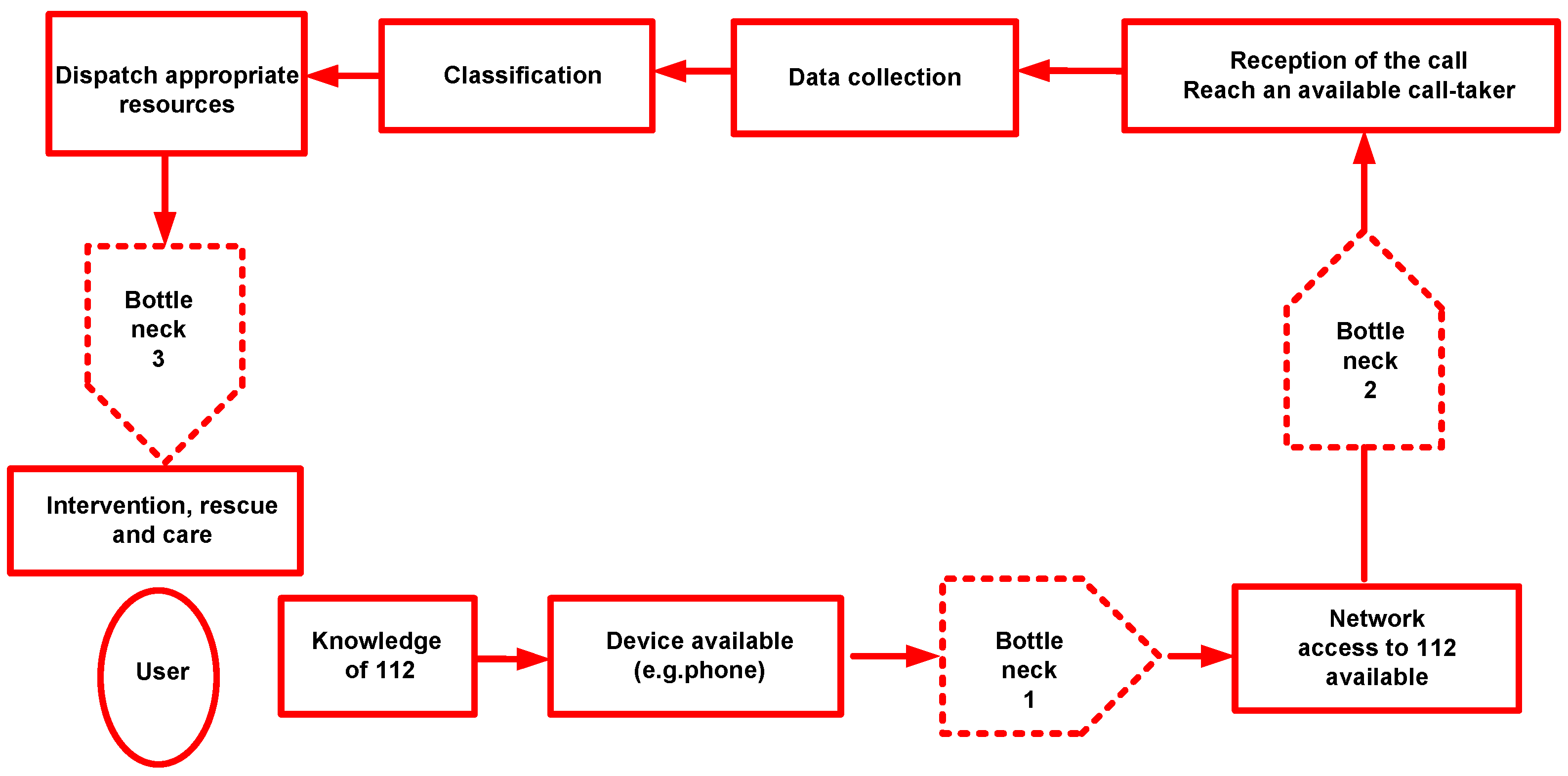
A major part of the existing research suggests that the reason for call repetition is strictly connected to occupancy of the servers and does not take into account the possibility of blocking and subsequent call repetition before and after occupation of the free server. However, there exist a lot of situations where this peculiarity of input flow formation should be taken into account. For example, in an emergency service, a customer can repeat an attempt after being processed by IVR (Interactive Voice Response) or can be blocked on route to the emergency service. This happens before the occupation of a free operator. The operator can refuse to service a call, and become the reason for retrial because of restricted access to the intervention resources required for proper call servicing. This happens in the presence of a free operator. The listed sequence of bottlenecks occurs in the emergency service chain; see
Figure 1 taken from [
1]. The same types of blocking should be considered when we model transmission resource occupancy in routes consisting of several links and take into account the possibility of call repetitions because the called party is busy or there is no answer.
Detailed surveys of publications devoted to queueing systems with retrials have been undertaken, e.g., in [
14,
15,
16,
17]. By taking into account customer behavior, we can model the input flow in a way that is close to the real processes happening in telecommunication systems that is considered in the overload situation. This aspect creates problems with the theoretical analysis of such models, because time intervals between successive call arrivals are now dependent random variables. We can avoid this problem by including the number of repeated customers in the definition of the model’s state. This is done in most publications devoted to this subject. It allows use of Markov processes for model description but seriously complicates the numerical analysis. Performance measures can be found by solving the system of state equations either using the Gauss–Seidel iterative algorithm [
2,
18,
19,
20] or by matrix-geometric methods, when the corresponding Markov process has a suitable structure [
17,
21,
22]. The first approach is time-consuming, and the last is numerically unstable for real values of input parameters because of the necessity to convert a large matrix. Such a situation seriously complicates the use of models with retrials as a component of planning tools, because it requires first numerical stability of the calculation algorithm, and second the possibility to estimate performance measures for any choice of input parameters for a reasonable time.
A model with such characteristics can be found in the literature (see, for example [
20]). This is a Markov model of a fully available group of servers with the possibility of call repetition only because all servers are busy. Furthermore, we refer to this model as a basic model with repeated calls. Performance measures of this model can be found using a recursive algorithm based on the concept of truncation of the model’s state space [
2,
17,
19,
20,
23]. For this model, the asymptotic formulae for the calculation of characteristics in the case of extreme load can be also found in explicit form [
24]. We generalize the basic model in three directions. First, we will take into account the possibility of the aging of transmitted information during the process of repetitions. Second, we will consider the scenario of blocking before occupying a server, and third, the possibility of losses after occupying a server. In the last two cases a customer can repeat an attempt. The aim of this paper is to show that performance measures of a generalized model can be calculated with the help of a basic model with some changes in input parameters.
The closest model with retrials to the model considered in this paper was analyzed in [
2,
19]. That model consists of a fully available group of servers with the possibility of waiting. For this model, asymptotic expressions of performance measures for large loads are derived. The values of the characteristics are obtained after solving the system of state equations by the Gauss–Seidel iterative algorithm. The distinguishing features of the model and results obtained in this paper, compared to [
2,
19], are as follows:
Additional features, such as the possibility of blocking and call repetition after occupying the server, and the possibility of the aging of transmitted information, are considered.
Performance measures are calculated using a recursive algorithm without construction of the sequence of approximations such as in the realization of the Gauss–Seidel procedure. This significantly reduces the counting time.
A short outline of this paper is as follows. In
Section 2, the mathematical description of the basic model with retrials is presented. In
Section 3, the same is done for the considered generalized model with retrials. The possibility of using the basic model for the calculation of performance measures of the generalized model is shown by the construction of some number of auxiliary models. That mathematical analysis is presented in
Section 4.
Section 5 contains the numerical results that show the possibility of using the analyzed model for the elimination of negative effects from PSAP overload based on filtration of the input flow of calls.
Section 6 concludes the paper. The
Appendix A contains a brief description of the recursive algorithm that allows the estimation of the performance measures of the basic model using an approach based on the concept of truncated state space.
The novelty of the results obtained in this work is as follows:
A new model for the functioning of a group of serving devices (servers) has been built and investigated, in which the user can additionally receive a refusal and repeat the call before and after seizing the server. It is also possible for transmitted information to age for the user repeating the call. The model can be used for the elimination of negative effects of overload in various telecommunication systems such as emergency information services, call and contact centers, access nodes, etc.
A procedure for transforming the model under study has been developed, which makes it possible to exclude the reasons for repeating a call before and after occupation of the server and the possibility of the aging of transmitted information. Thus, the calculation of the model is reduced to the calculation of the characteristics of its particular case, with the only reason for the denial of service being the busyness of the servers. This problem is much easier to solve using an approach based on the concept of a truncated state space. This method of performance measurement estimation allows significant savings of computer resources to be made by ignoring highly unlikely states in the process of calculation.
2. Basic Model Description
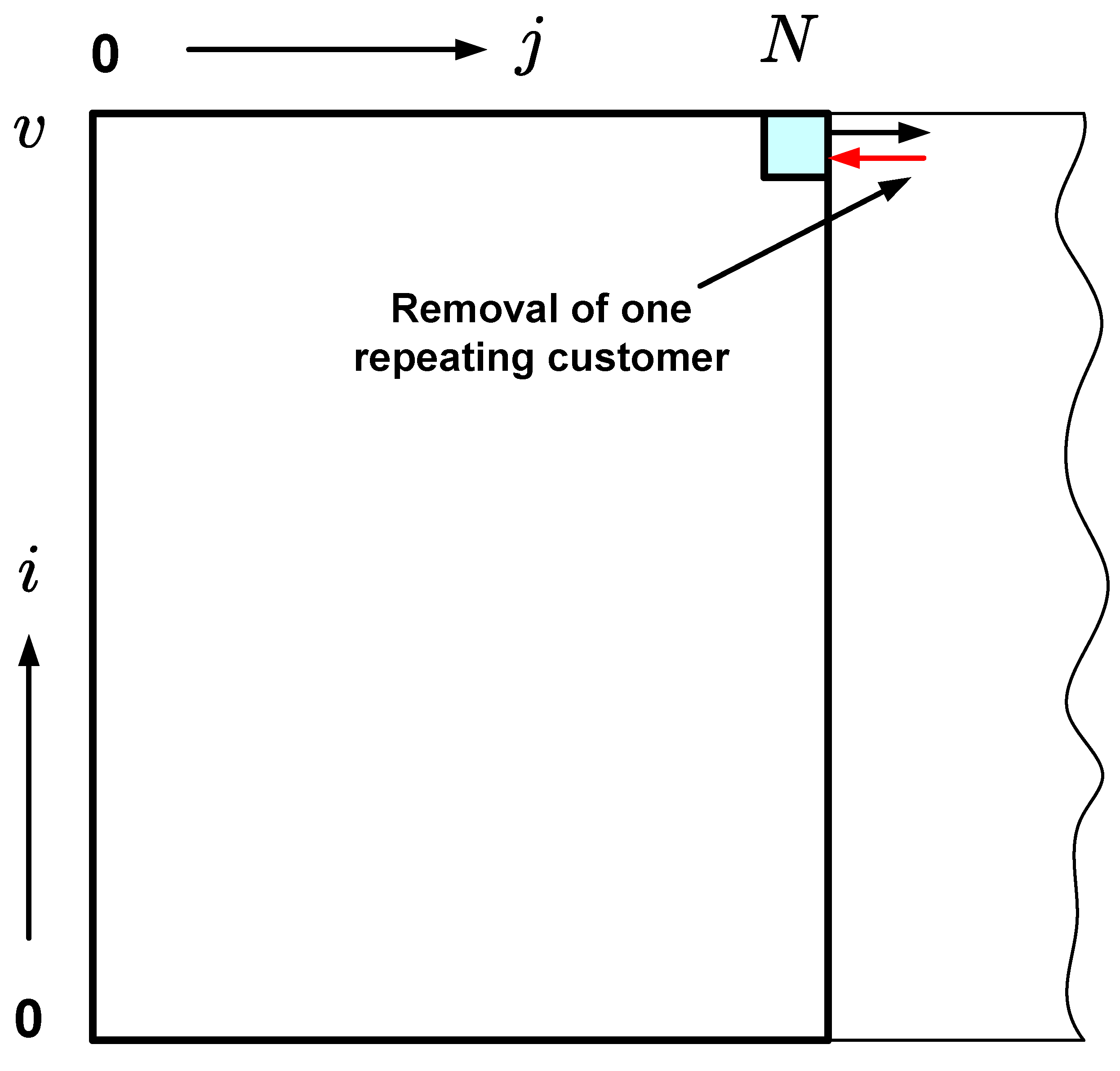
The basic model consists of a fully available group of v servers with incoming Poisson flow of primary call intensity . After being refused servicing, a customer makes another attempt to obtain the free server in a random time with probability for a primary call and with probability for a repeated call, exponentially distributed with parameter , and, with additional probability, respectively, , and , the customer stops their attempts to obtain a connection and leaves the system. Without loss of generality, we can suppose that the service time of a call (primary or repeated) is exponentially distributed with parameter equal to one, and it does not depend on the type of a call. It should be noted that the Poisson model is used only for the construction of the flow of primary calls. The total flow of requests for servicing includes repeated calls, and does not follow the Poisson model. This flow is quite complicated. It reflects the quality of application service that has been observed in the past. The possibility of using Poisson model is also discussed in the Introduction section.
Let us denote by
the number of repeating customers and by
the number of busy servers at time
t. The model’s functioning is described by a two-dimensional Markov process
with an infinite number of states
S,
,
. Let us denote by
the probability of stationary state
of
. Here,
j is the number of repeating customers and
i is the number of busy servers. Using the ideas of [
25] it can be proved that stationary distribution for
exists if
and
. If
, parameters
and
should satisfy the inequalities
and
. The values of
can be found after solving of the following system of state equations:
The normalizing condition is held for
. Here and beyond, we suppose that in the system of state equations, the probability of state with negative-integer components is equal to zero. Let us introduce the following notations:
In this paper we are using a standard family of performance measures that can be defined for the model with repeated attempts using stationary probabilities of the Markov process that describes model functioning. All such, characteristics can be expressed through
and
. For example, the value of
I is the mean number of busy servers, the value of
J is the mean number of repeating customers, the value of
is the ratio of lost calls, the value of
is the ratio of repeated attempts in the total flow of incoming calls, and the value of
M is the mean number of retrials per one primary call can be found from expressions
Considering this further we will work only with
and
and call these characteristics basic. Summing up the system of state Equation (
1) over
j with
i fixes, we obtain the local conservation laws for macrostate
Summing up the system of state Equation (
1) over
i with
j fixes, we obtain the similar relationships for macrostate
Summing up (
3) and (
4) over
i and
j, we obtain the conservation laws that relate main stationary characteristics of the basic model
Relationship (
5) can be used for the estimation of the error caused by truncation of the used state space (see
Appendix A), for the indirect measurement of the intensity of primary calls and for solving a variety of other problems arising in the exact and approximate analysis of the introduced model [
2,
18,
19,
20]. To find
and
, it is necessary to solve the system of state Equation (
1). The numerical procedure of doing this is briefly described in
Appendix A. In more detail, this approach is presented in [
20] for the particular case of the studied model, when
. An elaborated calculation method is based on the concept of truncated state space. This approach allows significant savings of computer resources to be made by ignoring highly unlikely states in the process of calculation. The numerical procedure includes two steps: first, it is necessary to decrease the number of unknowns in the system of state equations by not considering the states with negligible probabilities of existence. Second, it is necessary to find the error of estimation of the performance measures caused by truncation.
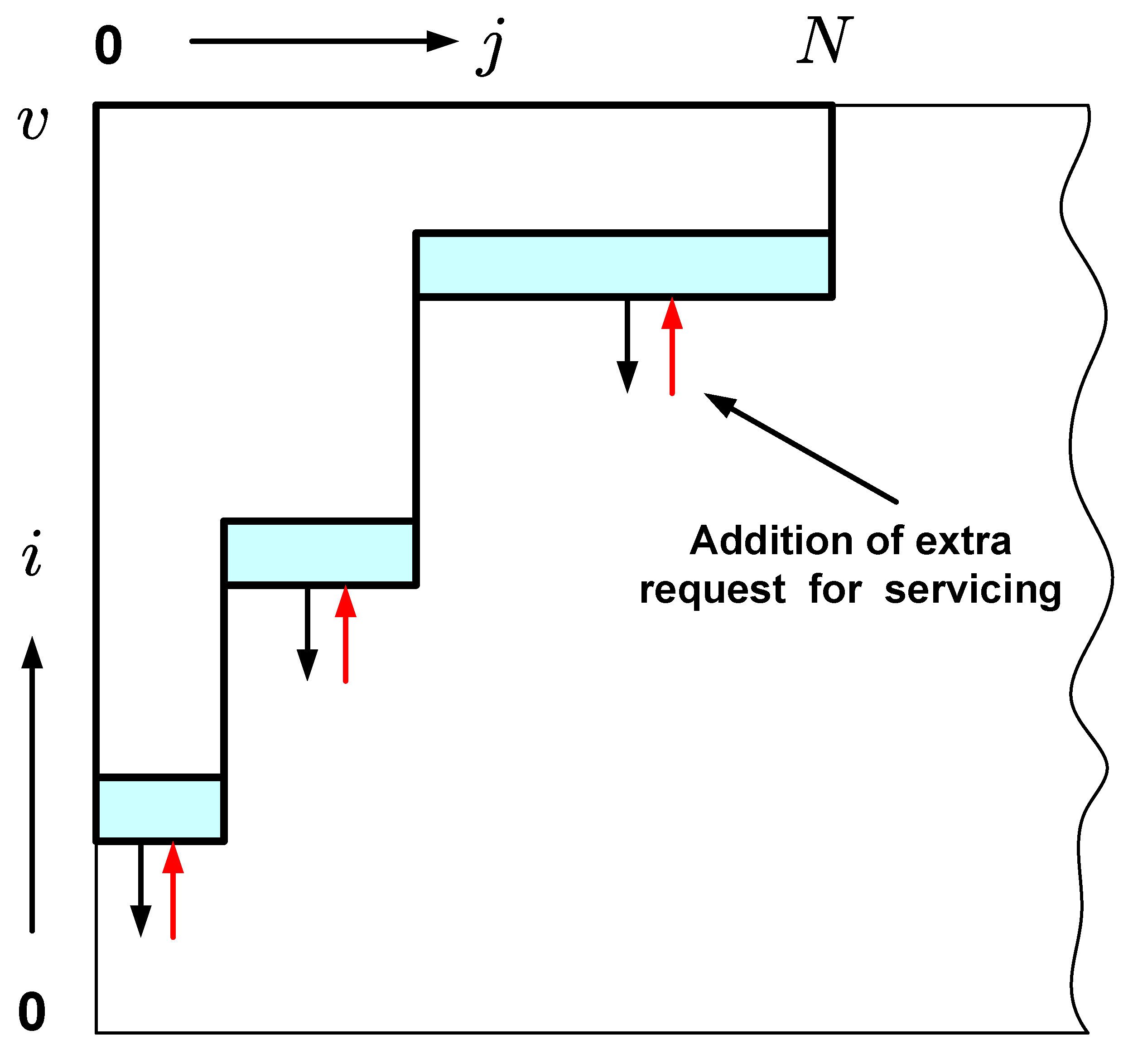
3. Generalized Model Description
We generalize the introduced model in the following three directions.
- (1)
We take into account the possibility of aging transmitted information during the process of repetitions. This situation can be modeled in the following way. We suppose that starting the process of repetitions also starts the process of aging. The maximum allowed time of aging is exponentially distributed with parameter . After this time, the customer stops the process of repetitions and leaves the system, unserved.
- (2)
We also consider the opportunity of losses before occupying the server. This situation will be modeled in the following way. We suppose that incoming call with probability for primary call and with probability for repeated call can be blocked before entering the service system. In this case, with probability for primary call and with probability for repeated call, the customer repeats the attempt after a random time, exponentially distributed with parameter , and with additional probabilities, respectively, , and , the customer stops attempting to obtain a connection and leaves the system, unserved. The probabilities and can be interpreted as losses at the stage of obtaining service between customer and the service system.
- (3)
In the same way, we take into account the possibility of losses after the occupation of the server. The probabilities of this event are for a primary call and for a repeated call. Probabilities of repetitions are, respectively, and for primary and repeated attempts. Time between successive repeated attempts in this case is also exponentially distributed with parameter . The probabilities of losses and can be interpreted as losses at the stages of servicing between service system and additional resources required for proper call servicing.
The basic model is a particular case of the generalized model. We obtain it by choosing
. To simplify the notation, we will use for performance measures of the generalized model the same symbols that were used for corresponding characteristics of the basic model. Different values of probabilities of losses for primary and repeated calls allow consideration of the following property of functioning of the service systems in overload conditions. After being refused service with some probability in primary attempt, a customer making repeated attempts will obtain a refusal with greater probability. The functional model of the studied service system is presented in
Figure 2.
The model’s functioning is described by a two-dimensional Markov process
, where
is the number of repeating customers and
is the number of busy servers at time
t defined in infinite state space
S,
,
. To remove out of consideration the exotic cases, we suppose that
,
,
,
. Let us denote by
the probability of the stationary state
of
. Using the ideas of [
25] it can be proved that stationary distribution for
exists if
, ;
, but ;
, , but .
The values of
can be found after solving the following system of state equations:
The normalizing condition is held for
. Let us introduce the notations
In the same way as was done for the basic model, we can prove that local conservation laws for macrostates
and
are looking as follows:
If values of
and
are known, we can calculate the main stationary characteristics of the model. For example, the corresponding formulae for
I,
J,
,
and
M can be found from expressions (see (
2))
where
Summing up (
7) and (
8) over
i and
j, we obtain the conservation laws that relate to the main stationary characteristics of the generalized model
As we can see from the above expressions, all stationary performance measures of the generalized model can be defined through
and
,
. To calculate the values of
and
, it is necessary to solve the system of state Equation (
6). We are not able to find the values of
recursively as can be done for the basic model (see
Appendix A), because in the generalized model a customer can repeat an attempt for any state of busy servers
. In the basic model, this can be done only when
. What remains is the solving of (
6) by standard approaches, either by Gauss–Seidel iterative algorithm or by matrix-geometric methods. The first approach is time-consuming; the last is numerically unstable for real values of input parameters, because of the necessity to convert a large matrix. We overcome these difficulties by showing that values of
and
can be calculated with the help of the corresponding characteristics of the basic model after a suitable choice of values of its input parameters. We prove it by constructing the number of auxiliary models using another probabilistic interpretation of input parameters of the generalized model or by algebraic transformations of the system of state equations.
All four auxiliary models that will appear later (the last is a basic model) will be particular cases of the generalized model, so we can use the same symbols to denote its input parameters and characteristics, differing them only by a superscript. The value of the digit used in the superscript for performance measures and means the number of auxiliary model. For input parameters, the digit denotes the number, changing by parameter its value. A parameter without a superscript has the same value as the generalized model.
5. Numerical Examples
Let us consider a few numerical examples that illustrate the usage of the constructed model for practical purposes. We start by showing the influence of blocking before and after the servers on values of main performance measurements:
—the ratio of lost calls—and
—the mean value of one server usage.
Figure 3 illustrates the dependence of
and
on the probability of primary and repeated calls blocking before servers.
The values of
are varying in interval from 0 to
. For fixed
the value of
is calculated from relationship
. Other fixed parameters used for
Figure 3 are as follows:
;
;
;
;
;
.
When
the blocking before servers does not affect the model performance measurements and
,
have acceptable for practical implementation levels
,
. With the increasing of
and
the ratio of lost calls strongly increases. In contrast, the mean value of one server usage decreases. The presented numerical results show the negative aspects of call losses before servers on values of main performance measures. The situation continues to deteriorate if losses also happen after servers. Additional reasons for call repetition increase the ratio of lost calls and decrease the mean value of server use compared to
Figure 3. This result is illustrated in
Figure 4 for the same values of input parameters that was used in
Figure 3 only with
and
.
It is well known that emergency services are an object of overload. The overload can be caused by many reasons that are discussed in
Section 1. To decrease the negative consequences of overload we can redirect part of the input flow of primary calls to other emergency services with similar functions. The proportion of redirected calls can be found with the help of the constructed model. Let us consider a numerical example. The model’s input parameters are as follows:
;
;
;
and takes values
;
;
.
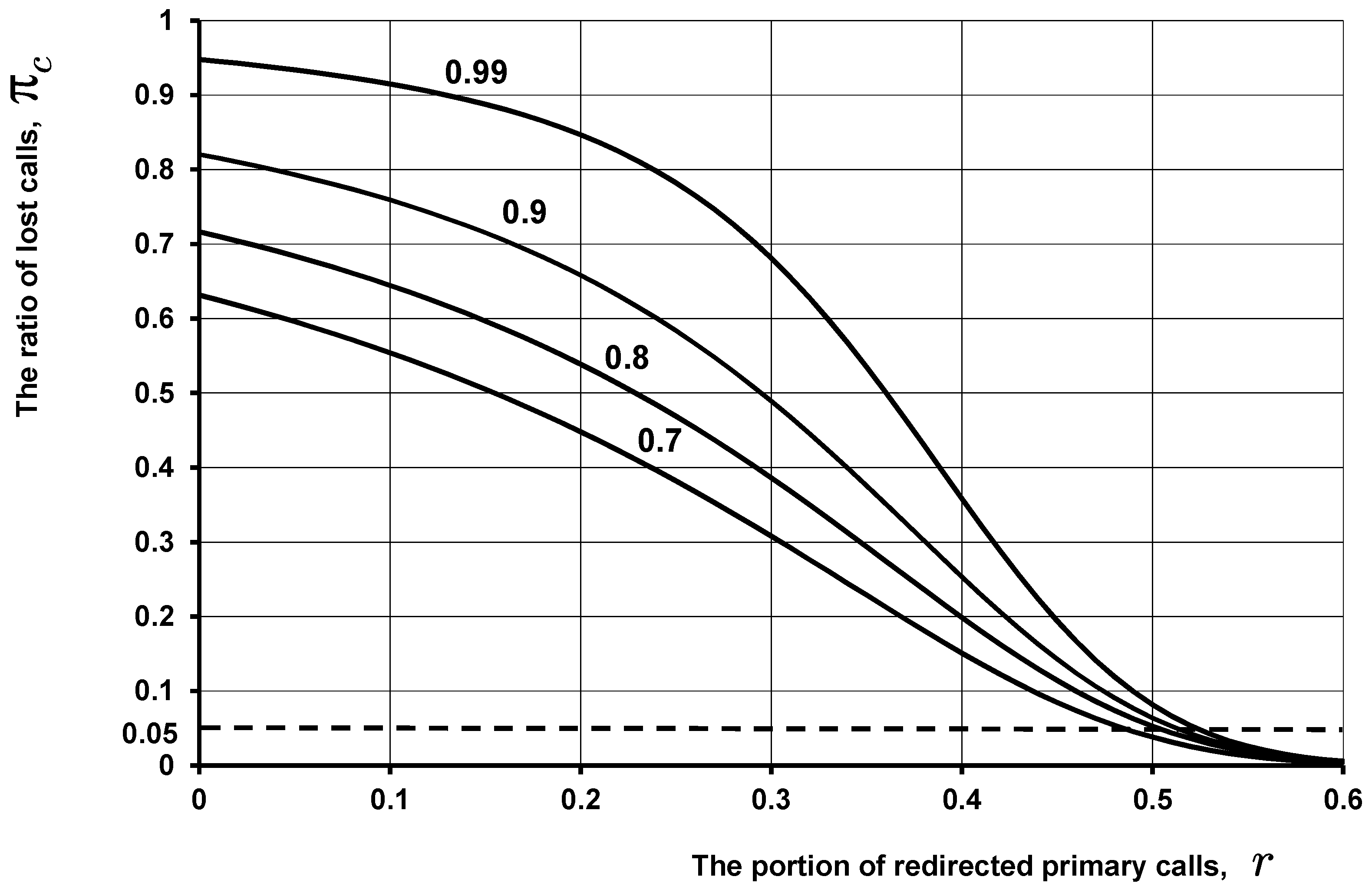
Figure 5 illustrates the dependence of
on the portion of redirected primary calls
r that varies from 0 (no redirection) to
for different values of persistence function
that takes values
. The results of calculations show that by redirecting some part of primary calls we can decrease the value of losses to the prescribed level (here the restriction on
is chosen as
). It is worth mentioning that the required value of redirected primary calls is weakly dependent on the value of probability of repetitions.
6. Discussion
The model of a fully available group of servers with Poisson flow of primary calls and possibility of losses before and after occupying the free server is constructed and analyzed. It is supposed that a call can leave the system because of the aging of transmitted information. All random variables realized in the model have exponential distribution and do not depend on each other. After every loss, a customer with some probability depending on the number of unsuccessful attempt repeats the call. Such models are seen in the modeling of various telecommunication systems such as emergency information services, call and contact centers, access nodes, etc., functioning in an overload situation. The stationary behavior of the system is described by the infinite state Markov process.
A procedure for transforming the model under study has been developed, which makes it possible to exclude the reasons for repeating a call before and after occupation of the server and the possibility of the aging of transmitted information. The procedure consists of four consecutive steps, where each step includes the construction and analysis of an auxiliary model that simplifies the functioning of the generalized model (see
Section 4.1,
Section 4.2,
Section 4.3 and
Section 4.4). Thus, the calculation of the model’s performance measures is reduced to the calculation of the characteristics of its particular case with the only reason for the denial of service being the busyness of the servers. The process of calculation is based on constructing and solving the system of state equations. This problem is much easier to solve using an approach based on the concept of a truncated state space. The error caused by truncation is estimated.
The positive features of estimation of the performance measurements based on the concept of a truncated state space lies in the following characteristics:
The realization of such and approach makes it possible to evaluate characteristics faster, due to the reduction of the used state space and the ability to evaluate characteristics with a predetermined accuracy (see,
Table A2). The reduction of counting time, especially noticeable in the analysis of asymptotic cases when intensity of input flow, is increasing (overload) [
20].
A suggested approach allows the avoidance of overflow/underflow problems in computer calculation by taking out of consideration highly unlikely states.
The values of probabilities are determined from simple recursive relations and do not require matrix inversion. All these properties are of great importance for the implementation of the algorithm in planning tools such as network calculators.
The presented numerical examples illustrate the usage of the model for showing the negative effect of losses before and after occupation of the servers on the model’s performance measures and for the elimination of PSAP overload based on the filtering of the input flow of calls.
The limitations of the obtained results can be summed up as follows:
The usage of exponential distribution with the same parameter for modeling the service time for all types of incoming requests. This property is necessary for the estimation of the error caused by truncation of the used state space. It does not mean that without this specific characteristic of the model we are not able to implement truncation concept, but in such scenarios finding errors is quite difficult. In most cases it can be done only empirically [
20].
The absence of waiting room for blocked requests. Because of this property, we are not able to estimate the distribution function of waiting time and mean value of waiting.
The usage of Poisson assumption as a model for primary requests. It should be noted that the Poisson model is used only for constructing the flow of primary calls. The total flow of requests for servicing includes repeated calls and does not follow the Poisson model. By doing this, we are reconstructing the input flow closer to reality, especially when service system is functioning in overload conditions. Retrials are forming a backlog that reflects the quality of request servicing that has been observed in the past. Nevertheless, the acceptability of using Poisson assumption for primary incoming requests needs additional study.
Directions for further research are formulated by taking into consideration above given limitations:
Find the error of performance measurement estimation caused by the truncation in the general case when service times depend on the type of a call and has exponential distribution with different mean values.
Generalize the model considered in the paper by taking into account the possibility of waiting and construct an effective algorithm of performance measurement estimation including the mean waiting time and waiting time distribution. Another direction of generalization considers the dependance of probability of call repetition on the type of refusal.
Study the acceptability of using Poisson assumption for primary requests.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




