
Numerical Modeling on Crack Propagation Based on a Multi-Grid Bond-Based Dual-Horizon Peridynamics



Abstract
:1. Introduction
2. Peridynamics Theory
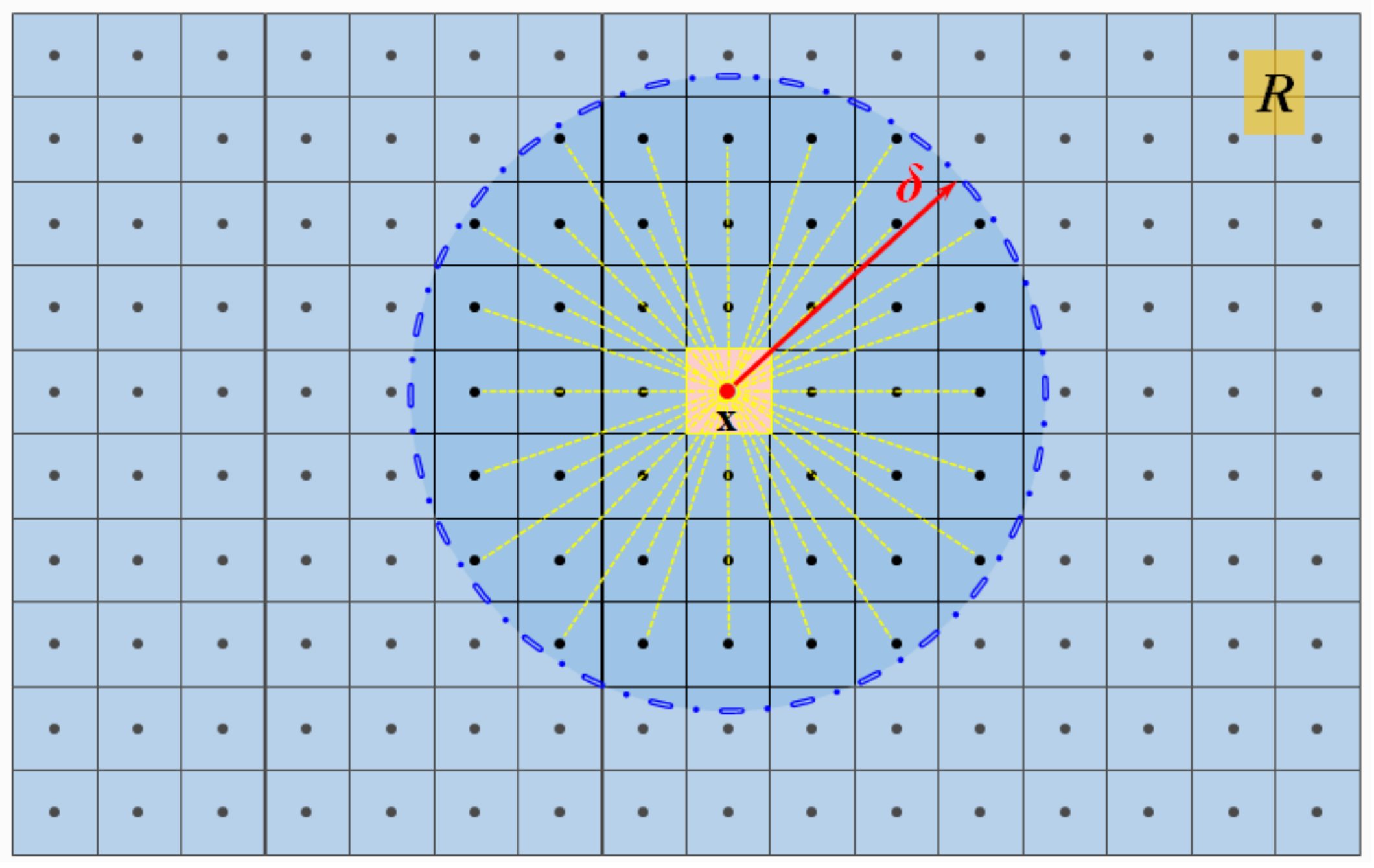
2.1. Traditional Peridynamics Theory
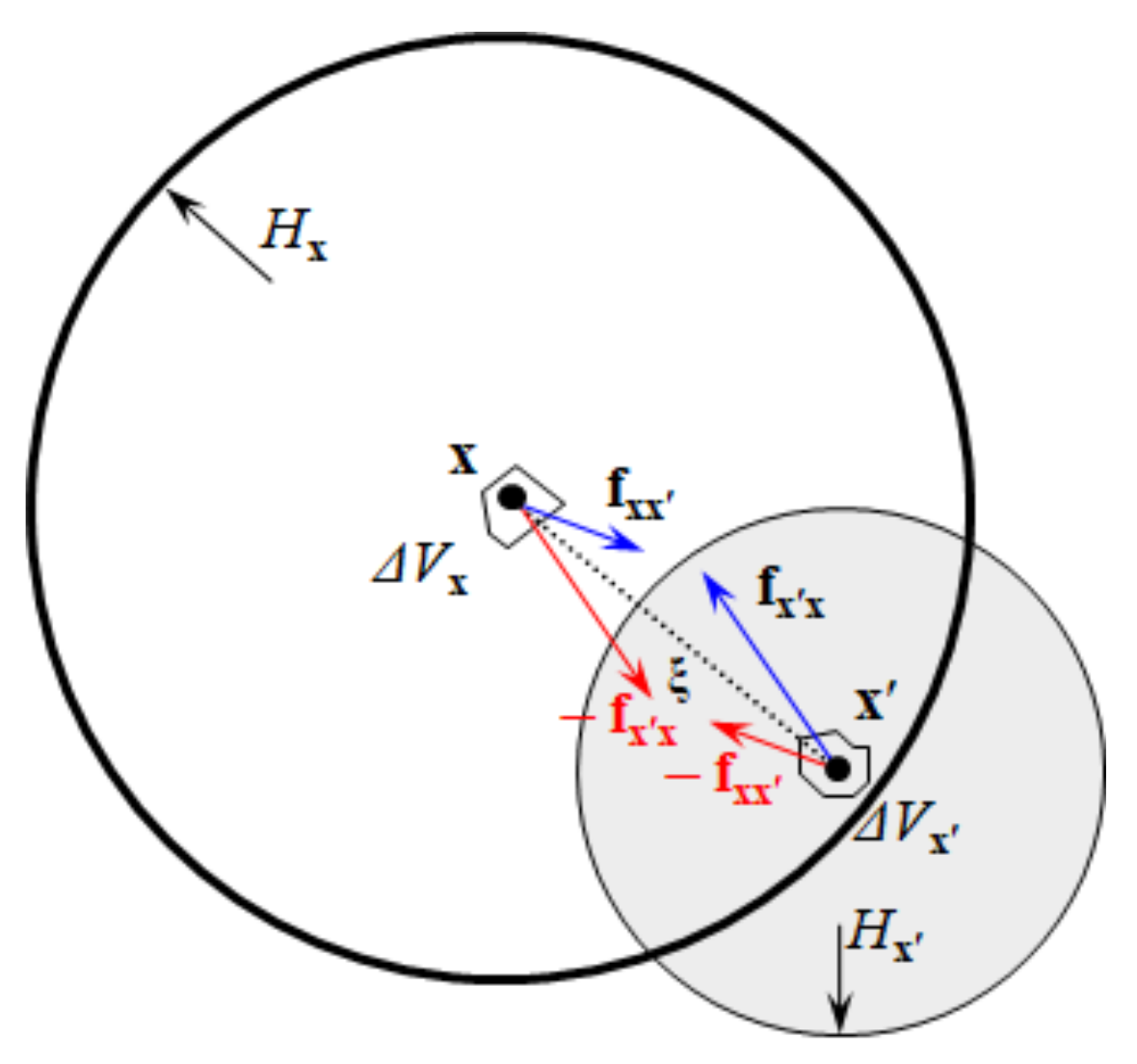
2.2. Dual-Horizon Peridynamics Theory
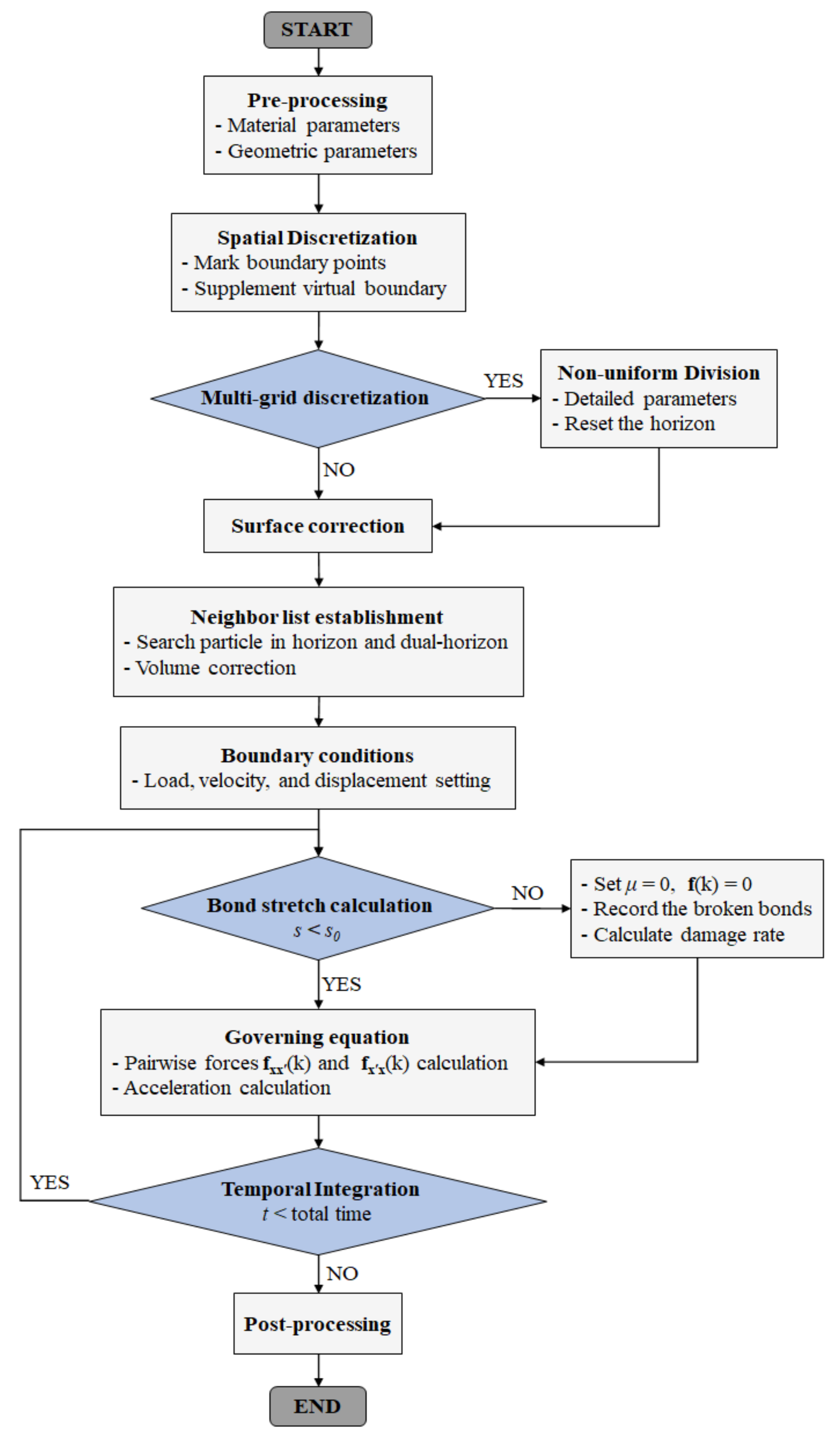
3. DH-PD Numerical Method
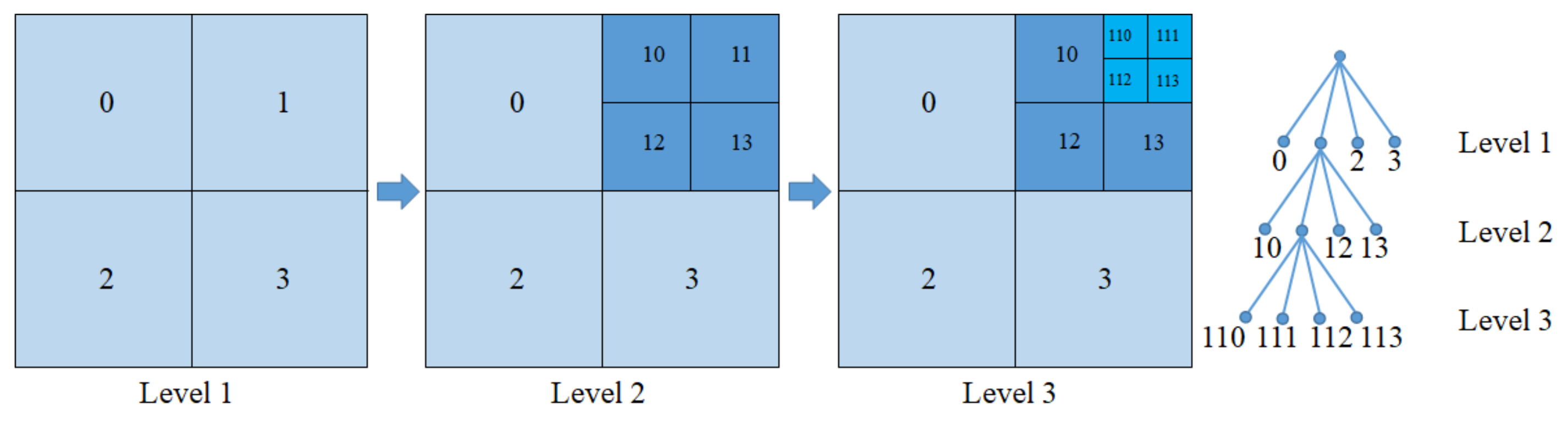
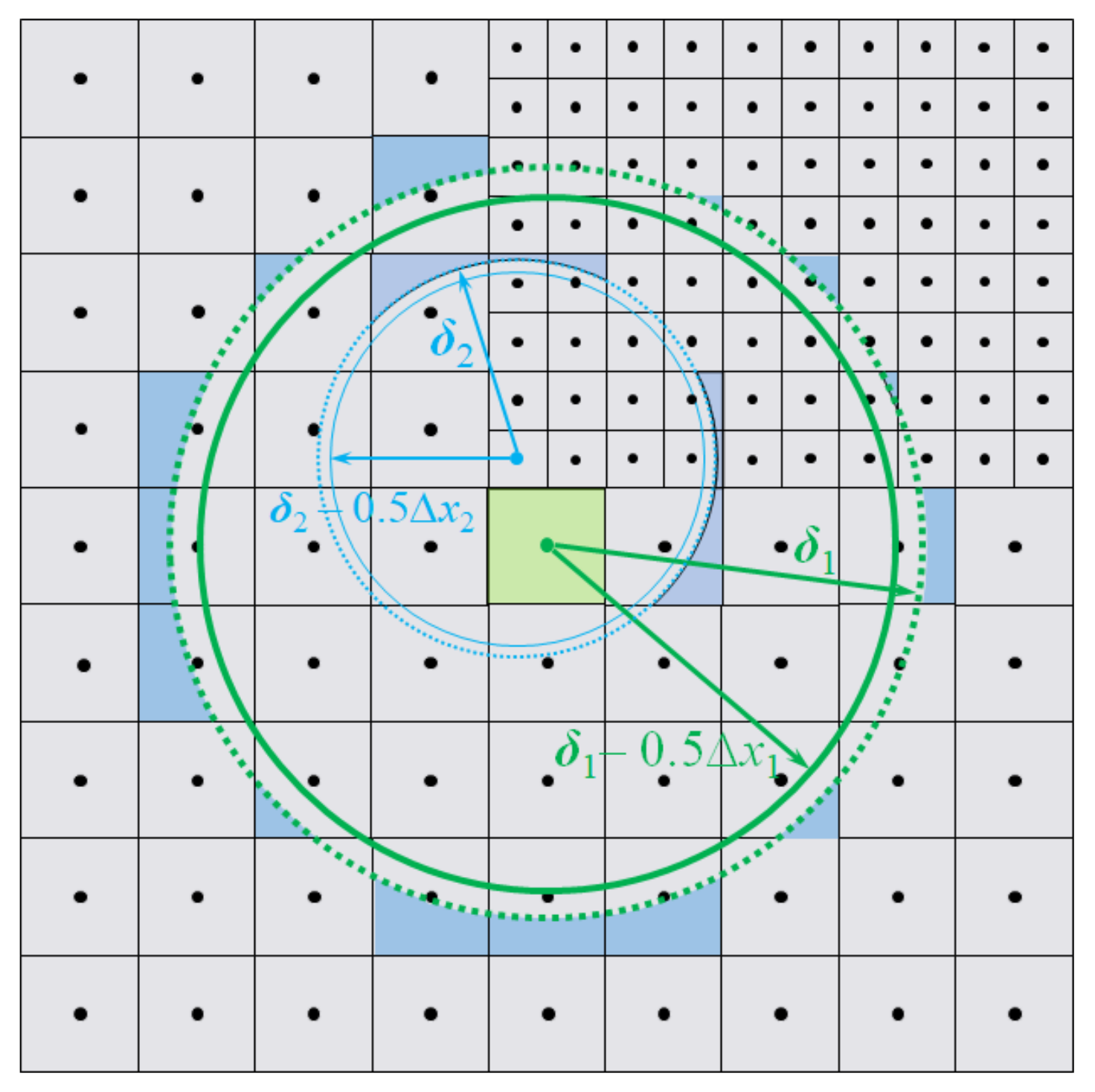
3.1. Non-Uniform Discretization
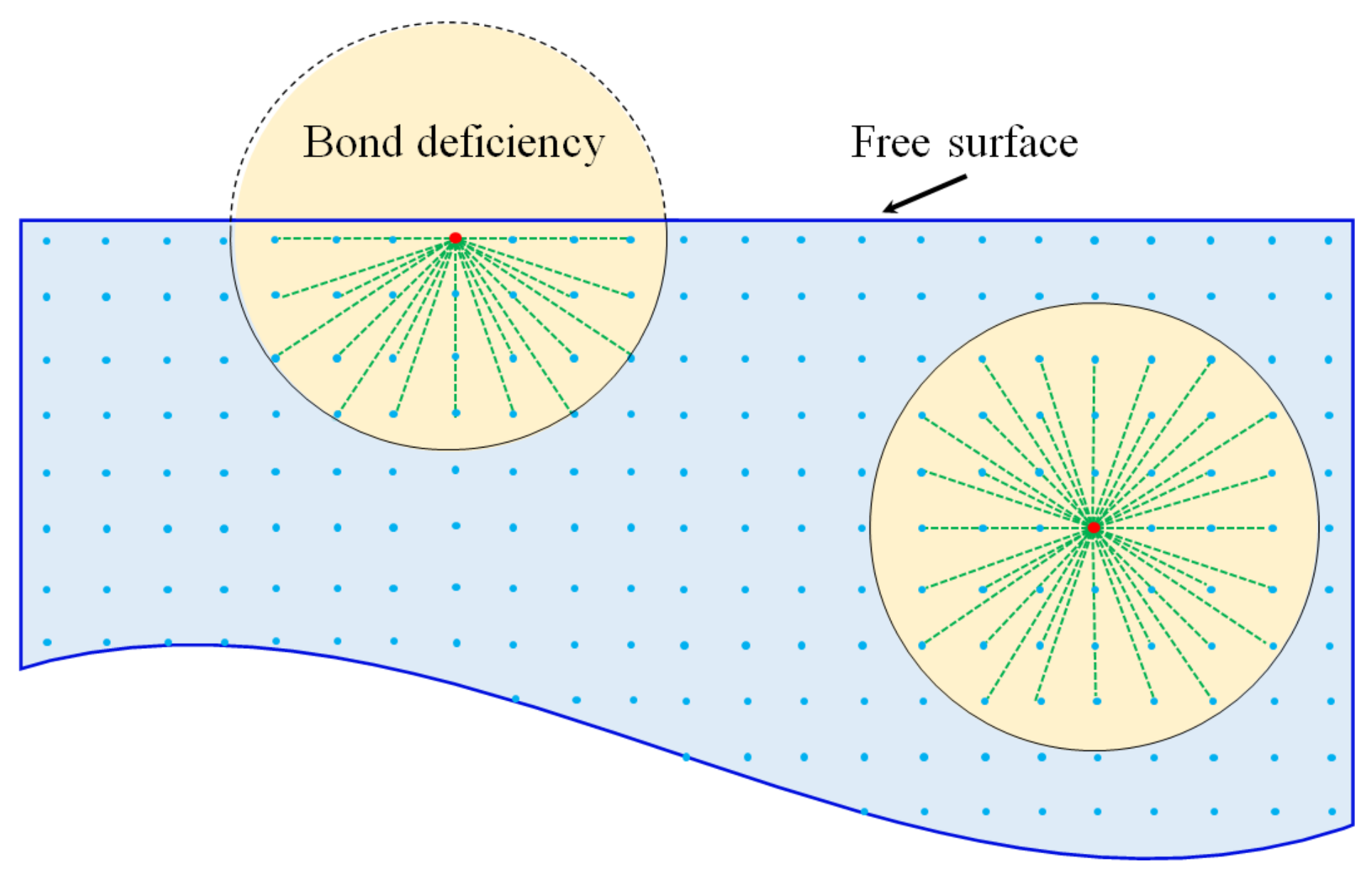
3.2. Volume Correction and Surface Correction
3.3. Explicit Time Integration
4. Numerical Examples and Discussions
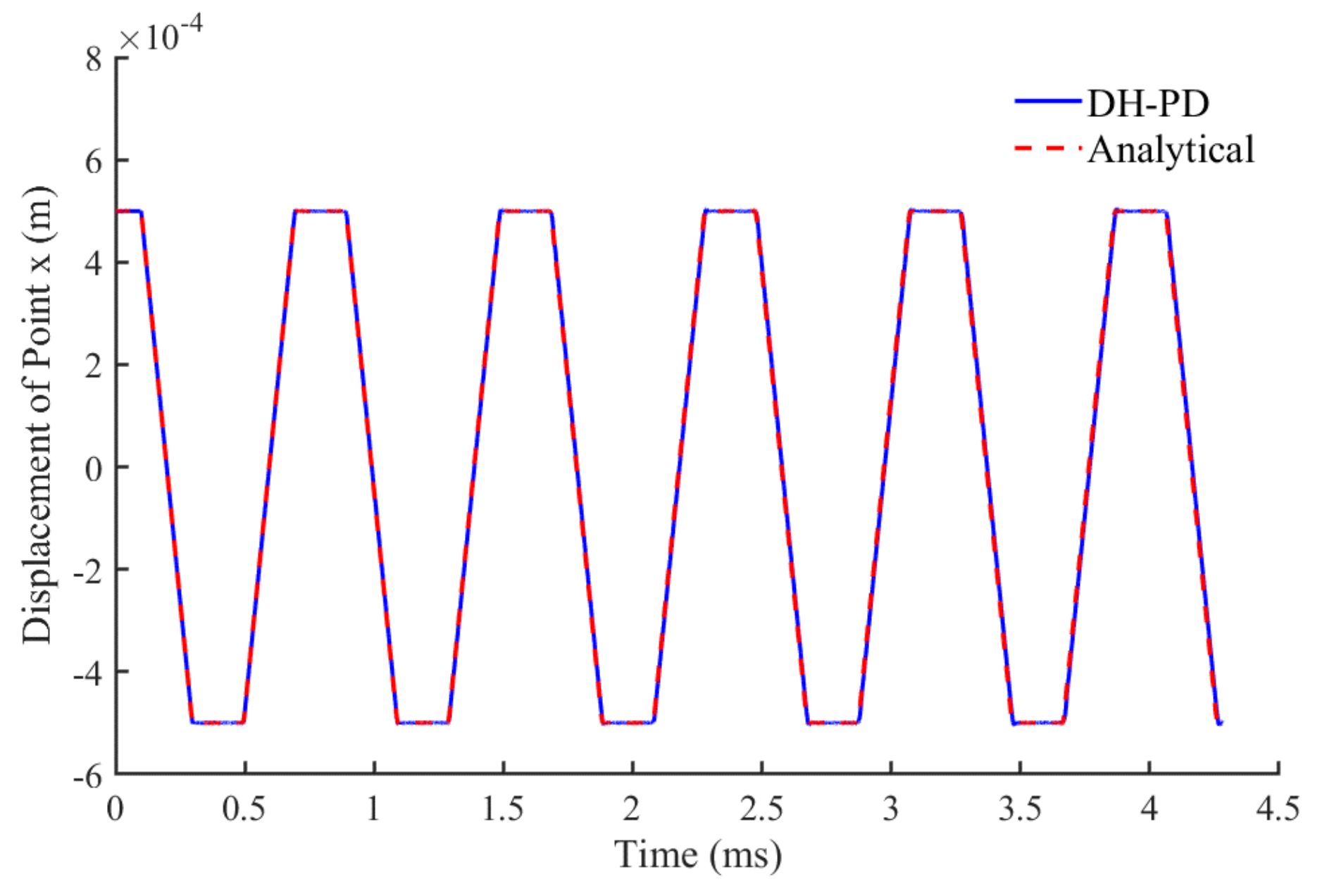
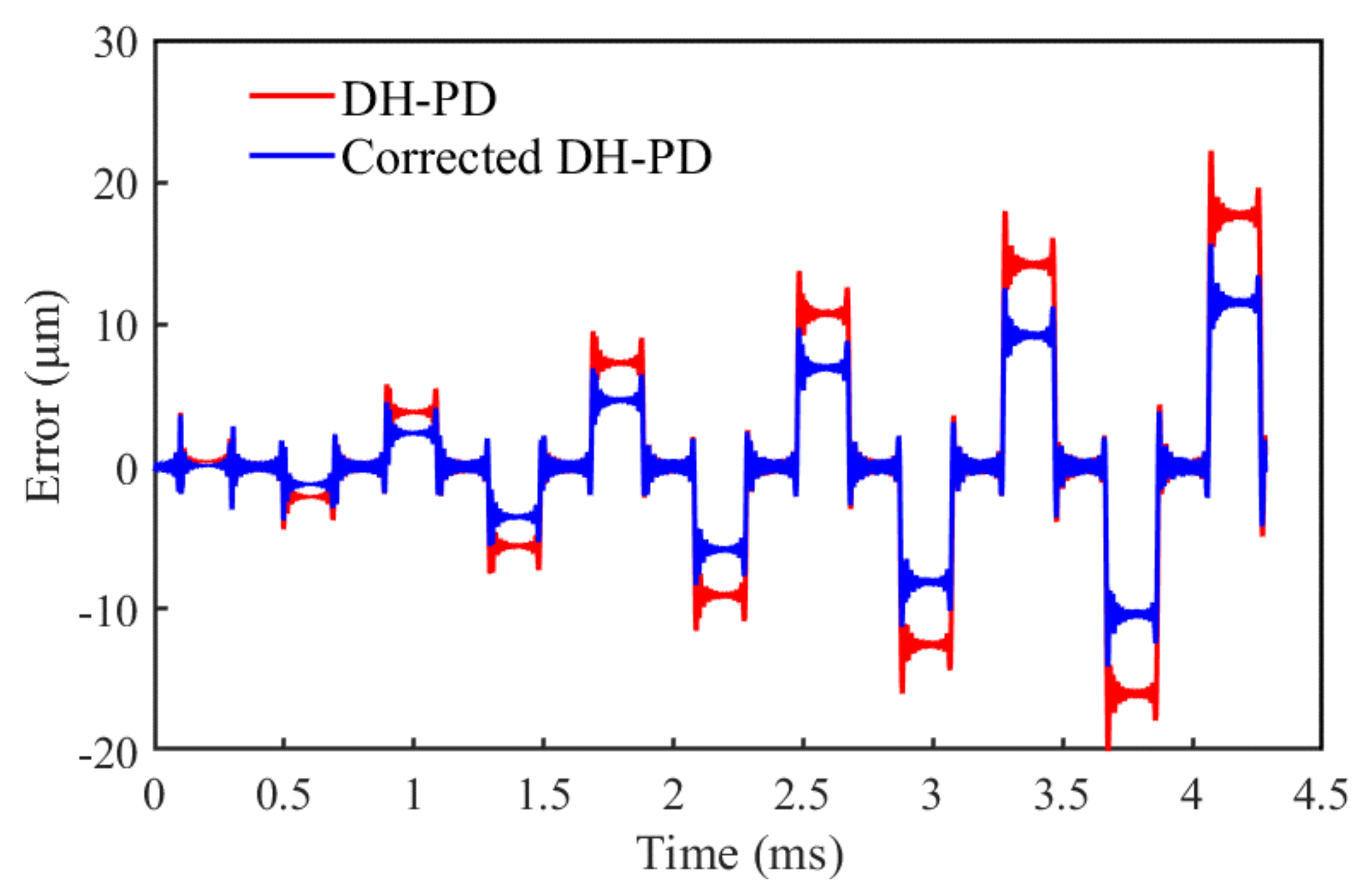
4.1. Benchmark Problem 1: Longitudinal Vibration of a Bar
4.2. Benchmark Problem 2: Wave Reflection in a Rectangular Plate
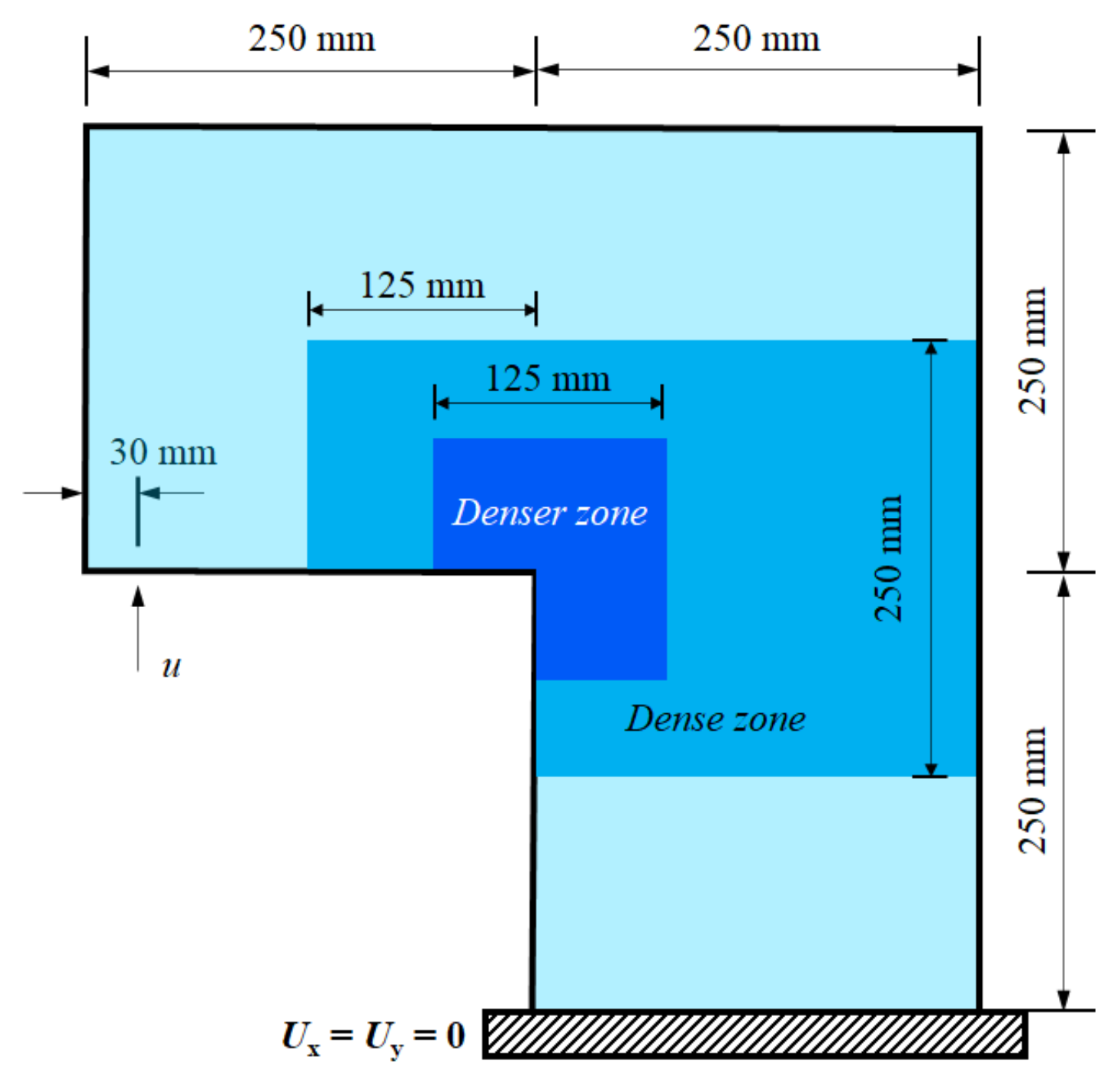
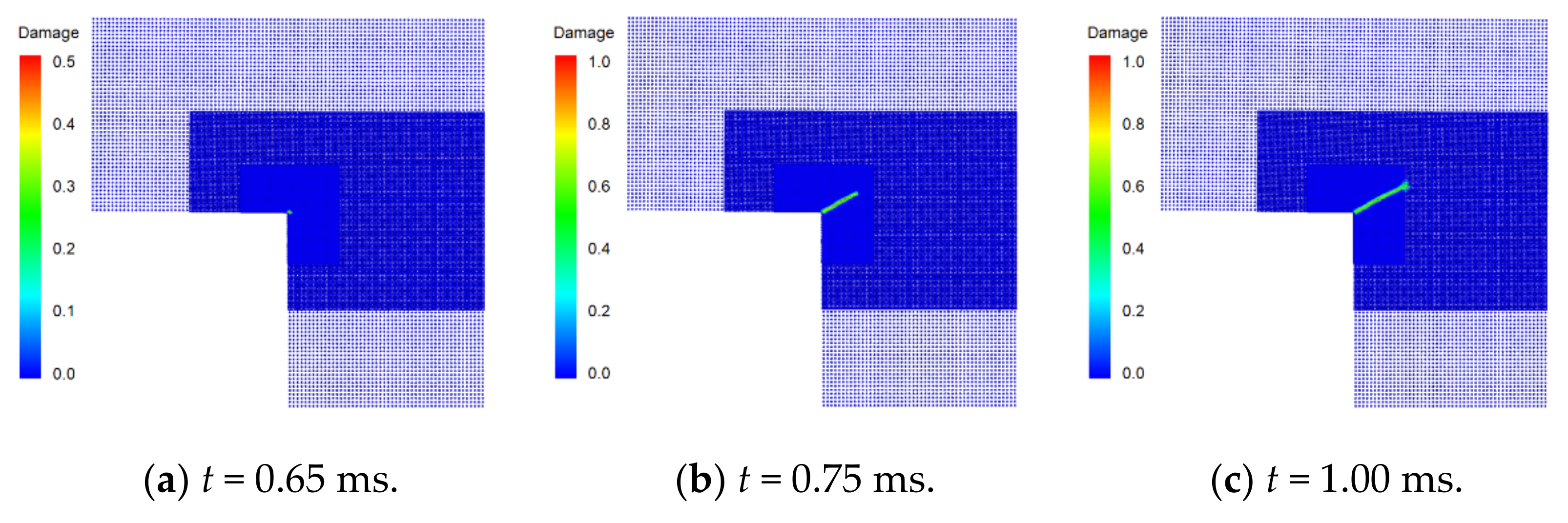
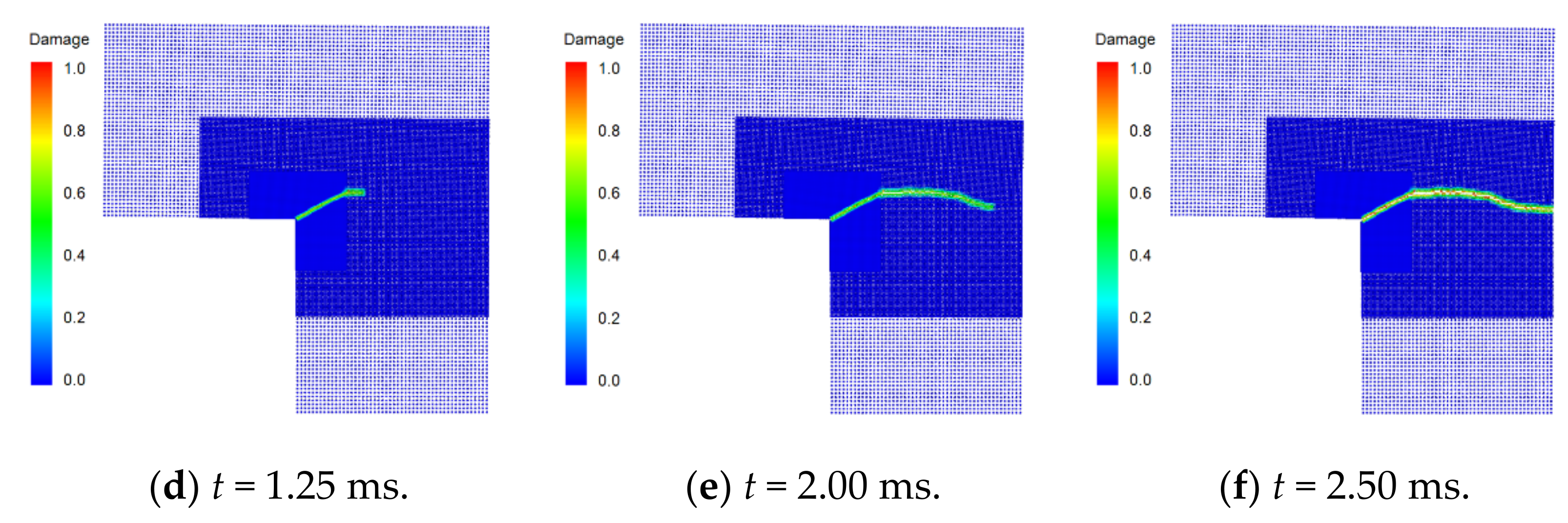
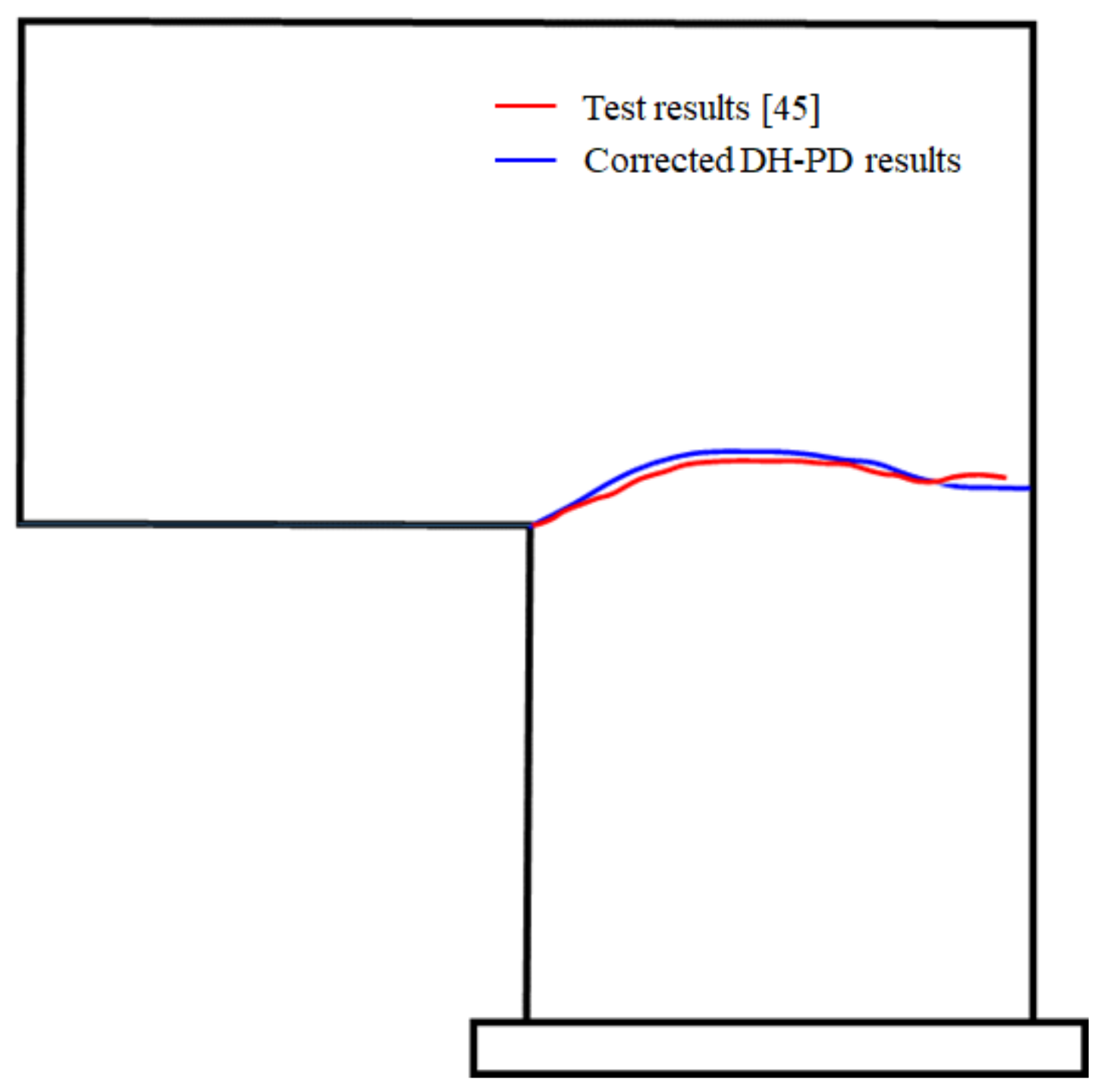
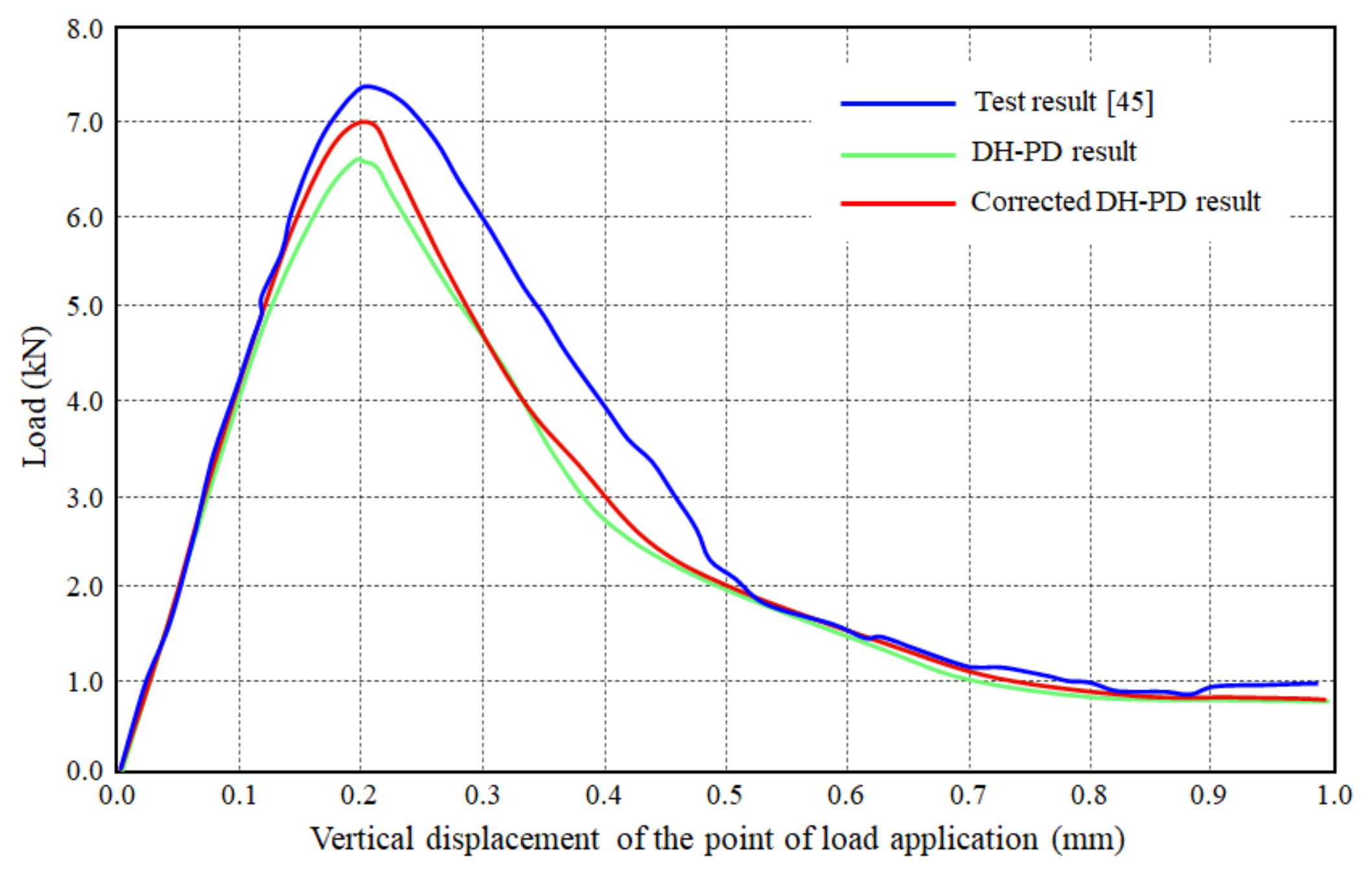
4.3. Numerical Application 1: Fracture of L-Shaped Concrete Specimen
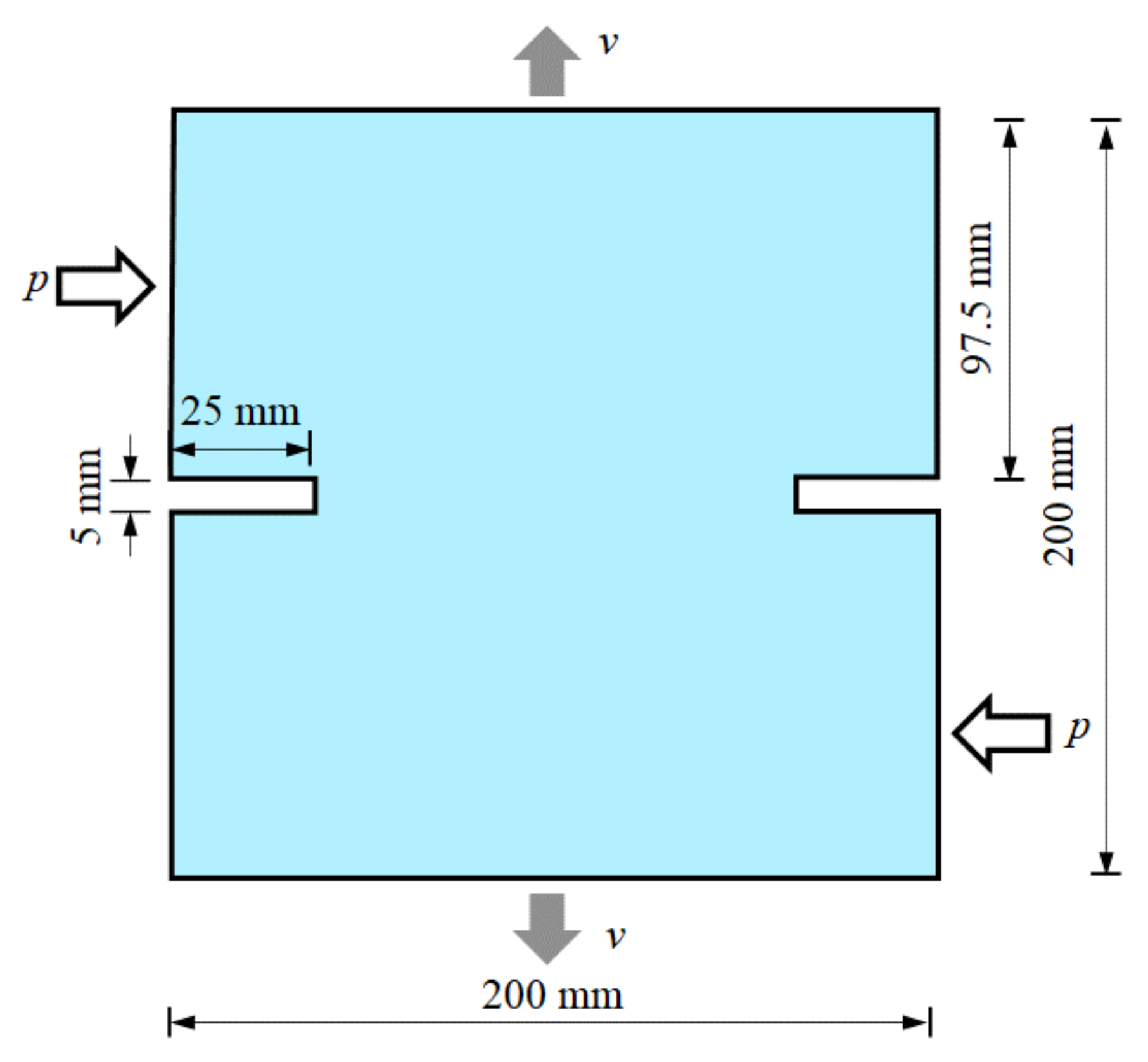
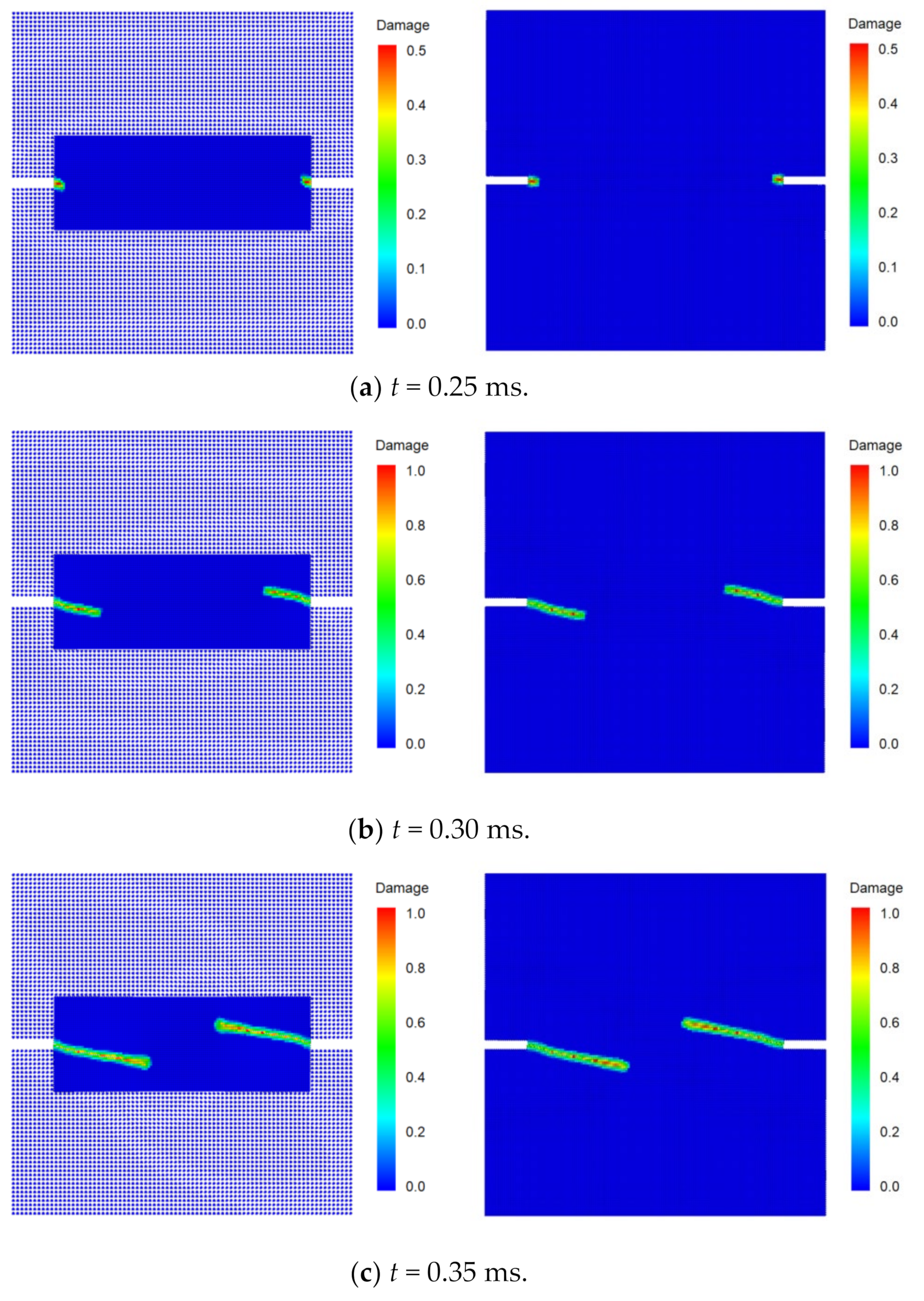
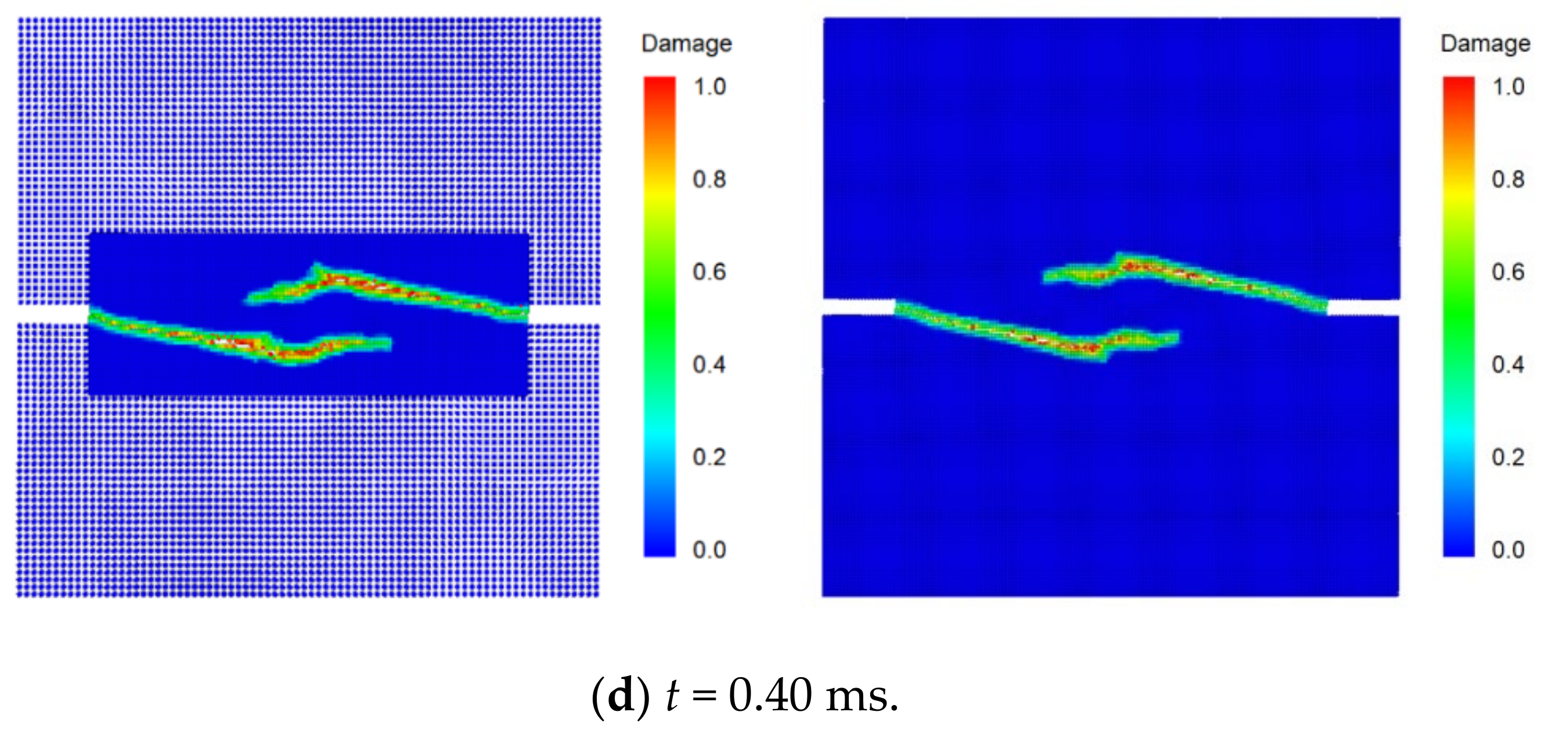
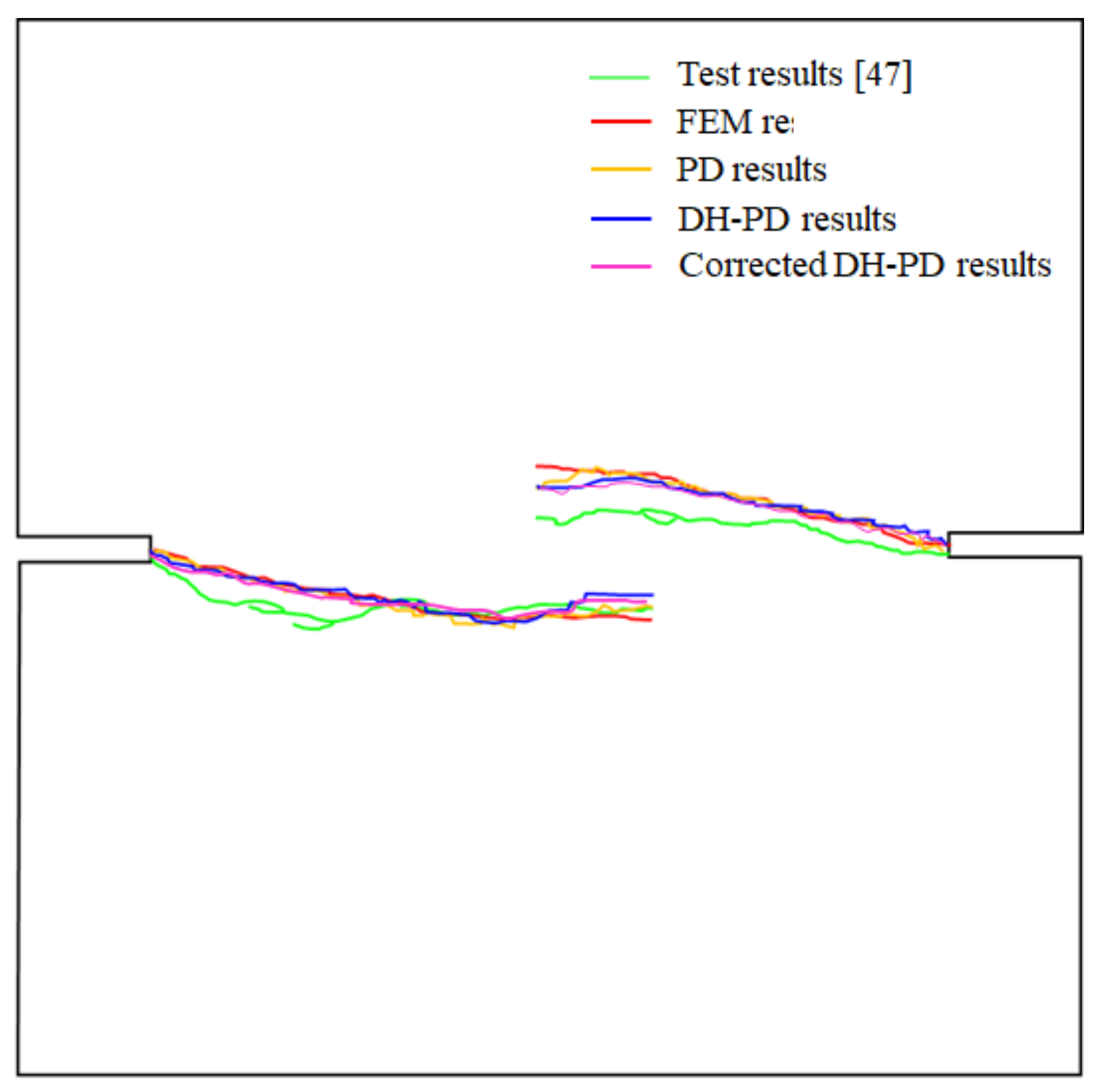
4.4. Numerical Application 2: Mixed Damage of a DEN Specimen
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ravi-Chandar, K. Dynamic Fracture of Nominally Brittle Materials. Int. J. Fract. 1998, 90, 83–102. [Google Scholar] [CrossRef]
- Ma, X.; Wang, F. The Fracture Analysis of Instop Gasket Using FEM Simulations. Adv. Sci. Lett. 2011, 4, 2573–2577. [Google Scholar] [CrossRef]
- Ramaswamy, K.; Babu, P.R. Fracture analysis of composite pressure vessel using FEM. Int. J. Comput. Mater. Sci. Eng. 2021, 10, 2150003. [Google Scholar] [CrossRef]
- Warren, T.L.; Silling, S.A.; Askari, A.; Weckner, O.; Epton, M.A.; Xu, J. A non-ordinary state-based peridynamic method to model solid material deformation and fracture. Int. J. Solids Struct. 2009, 46, 1186–1195. [Google Scholar] [CrossRef] [Green Version]
- Hou, C.-Y. Various remeshing arrangements for two-dimensional finite element crack closure analysis. Eng. Fract. Mech. 2017, 170, 59–76. [Google Scholar] [CrossRef]
- Bouchard, P.; Bay, F.; Chastel, Y.; Tovena, I. Crack propagation modelling using an advanced remeshing technique. Comput. Methods Appl. Mech. Eng. 2000, 189, 723–742. [Google Scholar] [CrossRef]
- Moës, N.; Dolbow, J.; Belytschko, T. A finite element method for crack growth without remeshing. Int. J. Numer. Methods Eng. 1999, 46, 131–150. [Google Scholar] [CrossRef]
- Chen, J.-W.; Zhou, X.-P. The enhanced extended finite element method for the propagation of complex branched cracks. Eng. Anal. Bound. Elem. 2019, 104, 46–62. [Google Scholar] [CrossRef]
- Unosson, M.; Olovsson, L.; Simonsson, K. Failure modelling in finite element analyses: Element erosion with crack-tip enhancement. Finite Elem. Anal. Des. 2006, 42, 283–297. [Google Scholar] [CrossRef]
- Alter, C.; Kolling, S.; Schneider, J. An enhanced non–local failure criterion for laminated glass under low velocity impact. Int. J. Impact Eng. 2017, 109, 342–353. [Google Scholar] [CrossRef]
- Wang, L.; Zhou, X. Phase field model for simulating the fracture behaviors of some disc-type specimens. Eng. Fract. Mech. 2020, 226, 106870. [Google Scholar] [CrossRef]
- Msekh, M.A.; Sargado, J.M.; Jamshidian, M.; Areias, P.M.; Rabczuk, T. Abaqus implementation of phase-field model for brittle fracture. Comput. Mater. Sci. 2015, 96, 472–484. [Google Scholar] [CrossRef]
- Zhu, Q.Z.; Ni, T.; Zhao, L.Y. Simulations of crack propagation in rock-like materials using peridynamic method. Chin. J. Rock Mech. Eng. 2016, 34, 3507–3515. (in Chinese). [Google Scholar]
- Cheng, Y.; Li, J. A complex variable meshless method for fracture problems. Sci. China Ser. G Phys. Mech. Astron. 2006, 49, 46–59. [Google Scholar] [CrossRef]
- Gao, H.; Cheng, Y. A Complex Variable Meshless Manifold Method for Fracture Problems. Int. J. Comput. Methods 2010, 7, 55–81. [Google Scholar] [CrossRef]
- Khazal, H.; Bayesteh, H.; Mohammadi, S.; Ghorashi, S.S.; Ahmed, A. An extended element free Galerkin method for fracture analysis of functionally graded materials. Mech. Adv. Mater. Struct. 2015, 23, 513–528. [Google Scholar] [CrossRef]
- Kou, M.M.; Han, D.C.; Xiao, C.C.; Wang, Y.T. Dynamic fracture instability in brittle materials: Insights from DEM simulations. Struct. Eng. Mech. 2019, 71, 65–75. [Google Scholar]
- Owayo, A.A.; Teng, F.C.; Chen, W.C. DEM simulation of crack evolution in cement-based materials under inclined shear test. Constr. Build. Mater. 2021, 301, 124087. [Google Scholar] [CrossRef]
- Silling, S. Reformulation of elasticity theory for discontinuities and long-range forces. J. Mech. Phys. Solids 2000, 48, 175–209. [Google Scholar] [CrossRef] [Green Version]
- Silling, S.; Askari, E. A meshfree method based on the peridynamic model of solid mechanics. Comput. Struct. 2005, 83, 1526–1535. [Google Scholar] [CrossRef]
- Oh, M.; Koo, B.; Kim, J.-H.; Cho, S. Shape design optimization of dynamic crack propagation using peridynamics. Eng. Fract. Mech. 2021, 252, 107837. [Google Scholar] [CrossRef]
- Ni, T.; Zaccariotto, M.; Zhu, Q.-Z.; Galvanetto, U. Static solution of crack propagation problems in Peridynamics. Comput. Methods Appl. Mech. Eng. 2019, 346, 126–151. [Google Scholar] [CrossRef]
- Hu, Y.; Madenci, E. Peridynamics for fatigue life and residual strength prediction of composite laminates. Compos. Struct. 2017, 160, 169–184. [Google Scholar] [CrossRef]
- Postek, E.; Sadowski, T. Impact model of the Al2O3/ZrO2 composite by peridynamics. Compos. Struct. 2021, 271, 114071. [Google Scholar] [CrossRef]
- Mikata, Y. Peridynamics for fluid mechanics and acoustics. Acta Mech. 2021, 232, 3011–3032. [Google Scholar] [CrossRef]
- Mikata, Y. Peridynamics for Heat Conduction. J. Heat Transf. 2020, 142, 081402. [Google Scholar] [CrossRef]
- Shou, Y.; Zhou, X. A coupled thermomechanical nonordinary state-based peridynamics for thermally induced cracking of rocks. Fatigue Fract. Eng. Mater. Struct. 2020, 43, 371–386. [Google Scholar] [CrossRef]
- Silling, S.A.; Lehoucq, R.B. Convergence of Peridynamics to Classical Elasticity Theory. J. Elast. 2008, 93, 13–37. [Google Scholar] [CrossRef]
- Liu, S.; Fang, G.; Liang, J.; Fu, M.; Wang, B. A new type of peridynamics: Element-based peridynamics. Comput. Methods Appl. Mech. Eng. 2020, 366, 113098. [Google Scholar] [CrossRef]
- Sun, W.; Fish, J. Coupling of non-ordinary state-based peridynamics and finite element method for fracture propagation in saturated porous media. Int. J. Numer. Anal. Methods Géoméch. 2021, 45, 1260–1281. [Google Scholar] [CrossRef]
- Ren, B.; Fan, H.; Bergel, G.L.; Regueiro, R.; Lai, X.; Li, S. A peridynamics–SPH coupling approach to simulate soil fragmentation induced by shock waves. Comput. Mech. 2015, 55, 287–302. [Google Scholar] [CrossRef]
- Zhang, Y.; Pan, G.; Zhang, Y.H.; Haeri, S. A multi-physics peridynamics-DEM-IB-CLBM framework for the prediction of erosive impact of solid particles in viscous fluids. Comput. Methods Appl. Mech. Eng. 2019, 352, 675–690. [Google Scholar] [CrossRef]
- DiPasquale, D.; Zaccariotto, M.; Galvanetto, U. Crack propagation with adaptive grid refinement in 2D peridynamics. Int. J. Fract. 2014, 190, 1–22. [Google Scholar] [CrossRef]
- Bobaru, F.; Yang, M.; Alves, L.F.; Silling, S.A.; Askari, E.; Xu, J. Convergence, adaptive refinement, and scaling in 1D peridynaics. Int. J. Numer. Methods Eng. 2009, 77, 852–877. [Google Scholar] [CrossRef] [Green Version]
- Shojaei, A.; Mossaiby, F.; Zaccariotto, M.; Galvanetto, U. An adaptive multi-grid peridynamic method for dynamic fracture analysis. Int. J. Mech. Sci. 2018, 144, 600–617. [Google Scholar] [CrossRef]
- Bazazzadeh, S.; Mossaiby, F.; Shojaei, A. An adaptive thermo-mechanical peridynamic model for fracture analysis in ceramics. Eng. Fract. Mech. 2020, 223, 106708. [Google Scholar] [CrossRef]
- Ren, H.; Zhuang, X.; Cai, Y.; Rabczuk, T. Dual-horizon peridynamics. Int. J. Numer. Methods Eng. 2016, 108, 1451–1476. [Google Scholar] [CrossRef] [Green Version]
- Rabczuk, T.; Ren, H. A peridynamics formulation for quasi-static fracture and contact in rock. Eng. Geol. 2017, 225, 42–48. [Google Scholar] [CrossRef]
- Wang, B.; Oterkus, S.; Oterkus, E. Derivation of dual-horizon state-based peridynamics formulation based on Euler–Lagrange equation. Contin. Mech. Thermodyn. 2020, 1–21. [Google Scholar] [CrossRef]
- Ren, H.; Zhuang, X.; Rabczuk, T. Dual-horizon peridynamics: A stable solution to varying horizons. Comput. Methods Appl. Mech. Eng. 2017, 318, 762–782. [Google Scholar] [CrossRef] [Green Version]
- Le, Q.V.; Bobaru, F. Surface corrections for peridynamic models in elasticity and fracture. Comput. Mech. 2018, 61, 499–518. [Google Scholar] [CrossRef]
- Scabbia, F.; Zaccariotto, M.; Galvanetto, U. A novel and effective way to impose boundary conditions and to mitigate the surface effect in state-based Peridynamics. Int. J. Numer. Methods Eng. 2021, 122, 5773–5811. [Google Scholar] [CrossRef]
- Madenci, E.; Oterkus, E. Peridynamic Theory and Its Applications. In Peridynamic Theory and Its Applications; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Speronello, M. Study of Computational Peridynamics, Explicit and Implicit Time Integration, Viscoelastic Material; University of Padua: Padua, Italy, 2015. [Google Scholar]
- Winkler, B.; Hofstetter, G.; Niederwanger, G. Experimental verification of a constitutive model for concrete cracking. Proc. Inst. Mech. Eng. Part L J. Mater. Des. Appl. 2001, 215, 75–86. [Google Scholar] [CrossRef]
- Naderi, M.; Jung, J.; Yang, Q.D. A three dimensional augmented finite element for modeling arbitrary cracking in solids. Int. J. Fract. 2016, 197, 147–168. [Google Scholar] [CrossRef]
- Nooru-Mohamed, M.B.; Schlangen, E.; van Mier, J.G. Experimental and numerical study on the behavior of concrete subjected to biaxial tension and shear. Adv. Cem. Based Mater. 1993, 1, 22–37. [Google Scholar] [CrossRef]
- Ožbolt, J.; Reinhardt, H. Numerical study of mixed-mode fracture in concrete. Int. J. Fract. 2002, 118, 145–162. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Δx = Δy | Horizon δ | Particle Numbers |
|---|---|---|---|
| I | 5 mm | 3.015 Δx | 4300 |
| II | 2.5 mm | 3.015 Δx | 10,924 |
| III | 1.25 mm | 3.015 Δx | 7504 |
| Total | 22,728 |
| Model | Δx = Δy | Horizon δ | Particle Numbers |
|---|---|---|---|
| PD | 1.25 mm | 3.015 Δx | 25,440 |
| DH-PD | 2.5 mm, 1.25 mm | 3.015 Δx | 5040 + 5280 = 10,320 |
| Model | Particle Numbers | Calculation Time |
|---|---|---|
| PD | 25,440 | 390.172 s |
| DH-PD | 10,320 | 177.866 s |
| Efficiency Increased | 119.4% |
| Numerical Models | Corrected DH-PD | DH-PD | PD | FEM |
|---|---|---|---|---|
| Correlation Coefficients | 0.957 | 0.952 | 0.952 | 0.929 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, Z.; Xie, J.; Lu, Z.; Qin, S.; Wang, L. Numerical Modeling on Crack Propagation Based on a Multi-Grid Bond-Based Dual-Horizon Peridynamics. Mathematics 2021, 9, 2848. https://doi.org/10.3390/math9222848
Dai Z, Xie J, Lu Z, Qin S, Wang L. Numerical Modeling on Crack Propagation Based on a Multi-Grid Bond-Based Dual-Horizon Peridynamics. Mathematics. 2021; 9(22):2848. https://doi.org/10.3390/math9222848
Chicago/Turabian StyleDai, Zili, Jinwei Xie, Zhitang Lu, Shiwei Qin, and Lin Wang. 2021. "Numerical Modeling on Crack Propagation Based on a Multi-Grid Bond-Based Dual-Horizon Peridynamics" Mathematics 9, no. 22: 2848. https://doi.org/10.3390/math9222848
APA StyleDai, Z., Xie, J., Lu, Z., Qin, S., & Wang, L. (2021). Numerical Modeling on Crack Propagation Based on a Multi-Grid Bond-Based Dual-Horizon Peridynamics. Mathematics, 9(22), 2848. https://doi.org/10.3390/math9222848