
A Global Optimization Algorithm for Solving Linearly Constrained Quadratic Fractional Problems

Abstract
:1. Introduction
2. A Reformulation of (1) and an Enhanced SOCP Relaxation
3. An Enhanced SOCP Relaxation Based Branch-and-Bound Algorithm
| Algorithm 1 A Branch-and-Bound Algorithm for Solving (1). |
Require: An instance of (1) and a given error tolerance . Set Optimization and .
|
4. Numerical Experiments
- ∘
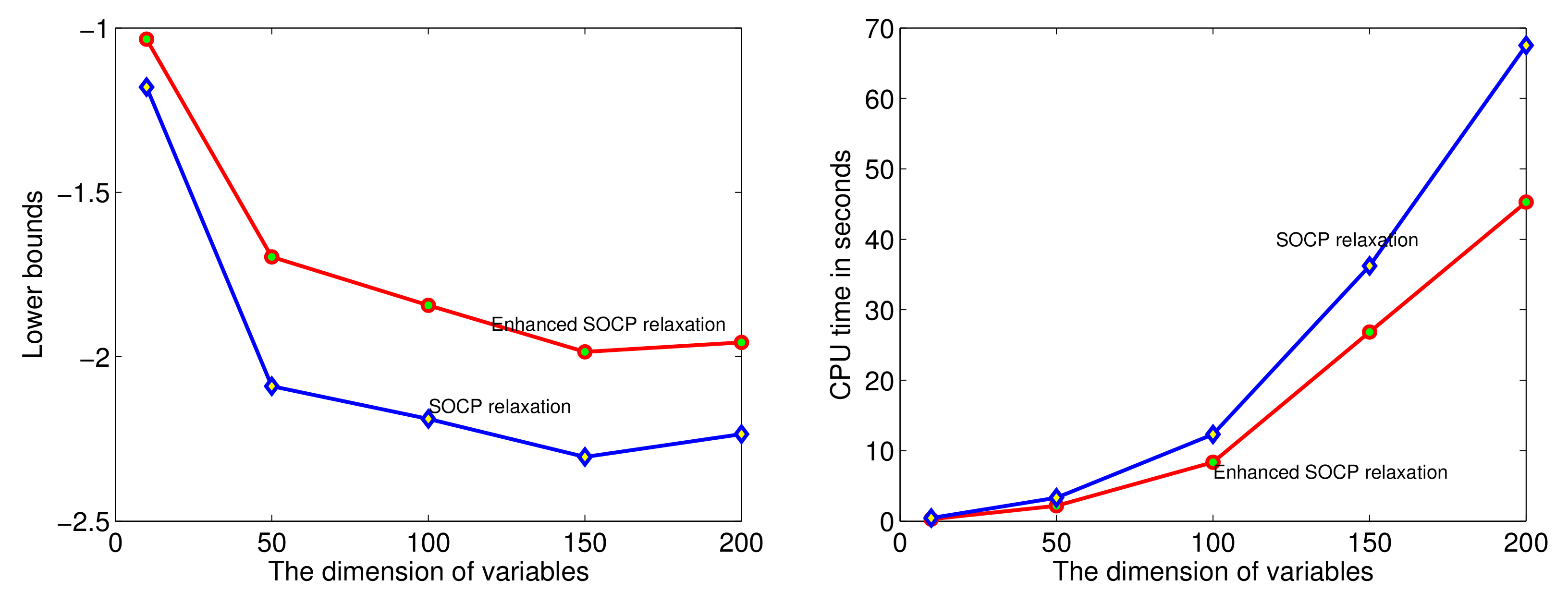
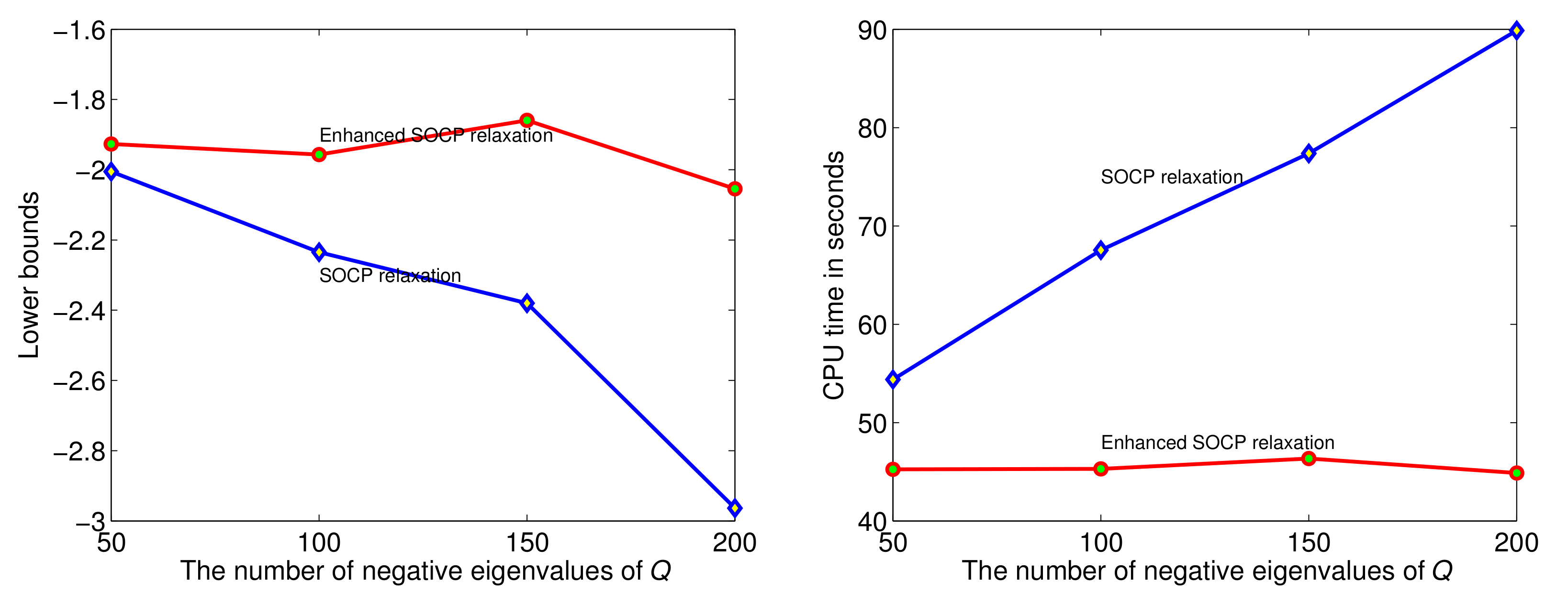
- LB_SOCP—Value of the initial lower bound obtained by the SOCP relaxation (8).
- ∘
- Opv—Optimal value provided by Algorithm 1 within the given error tolerance.
- ∘
- Nodes—Explored nodes of Algorithm 1 to obtain opv.
- ∘
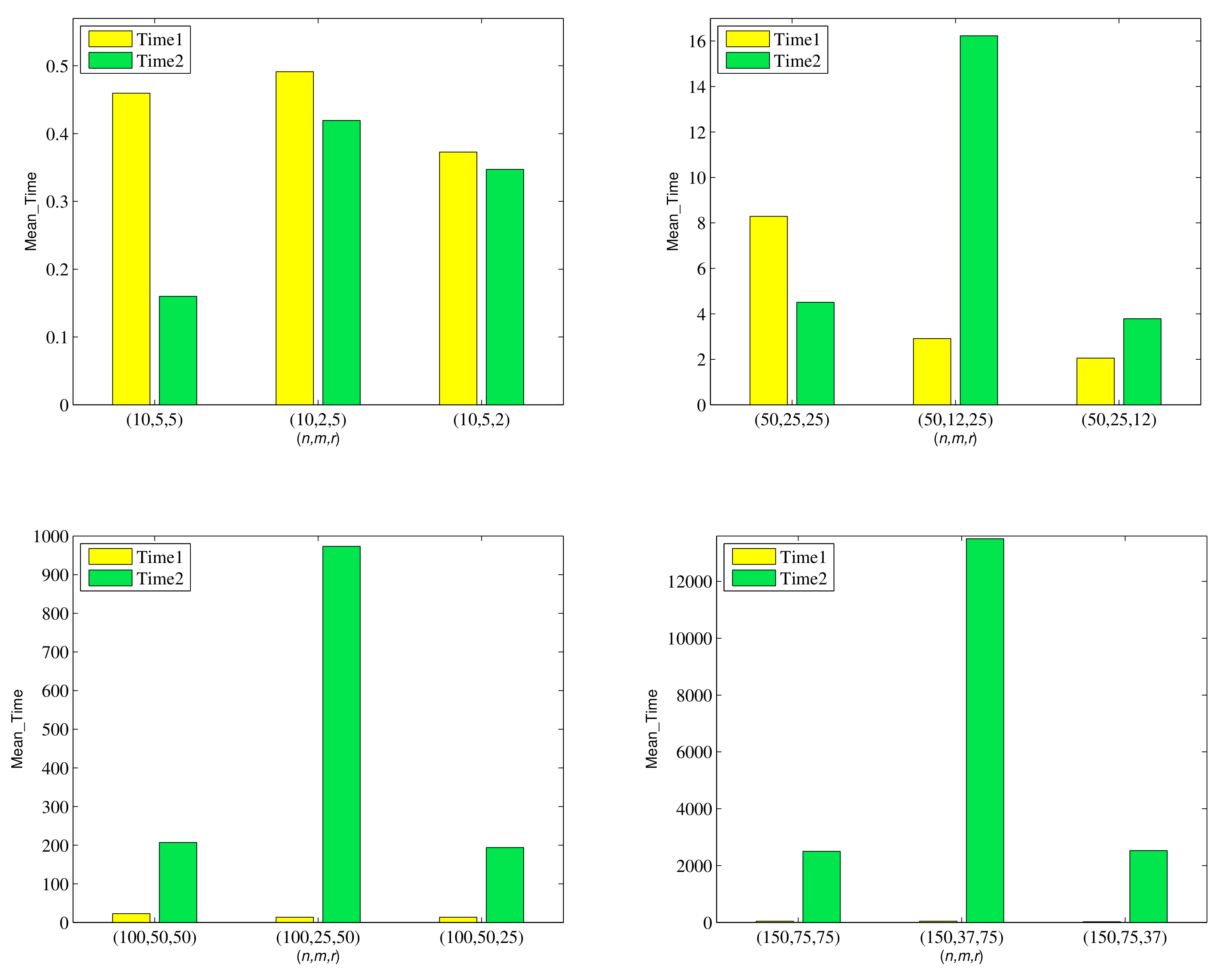
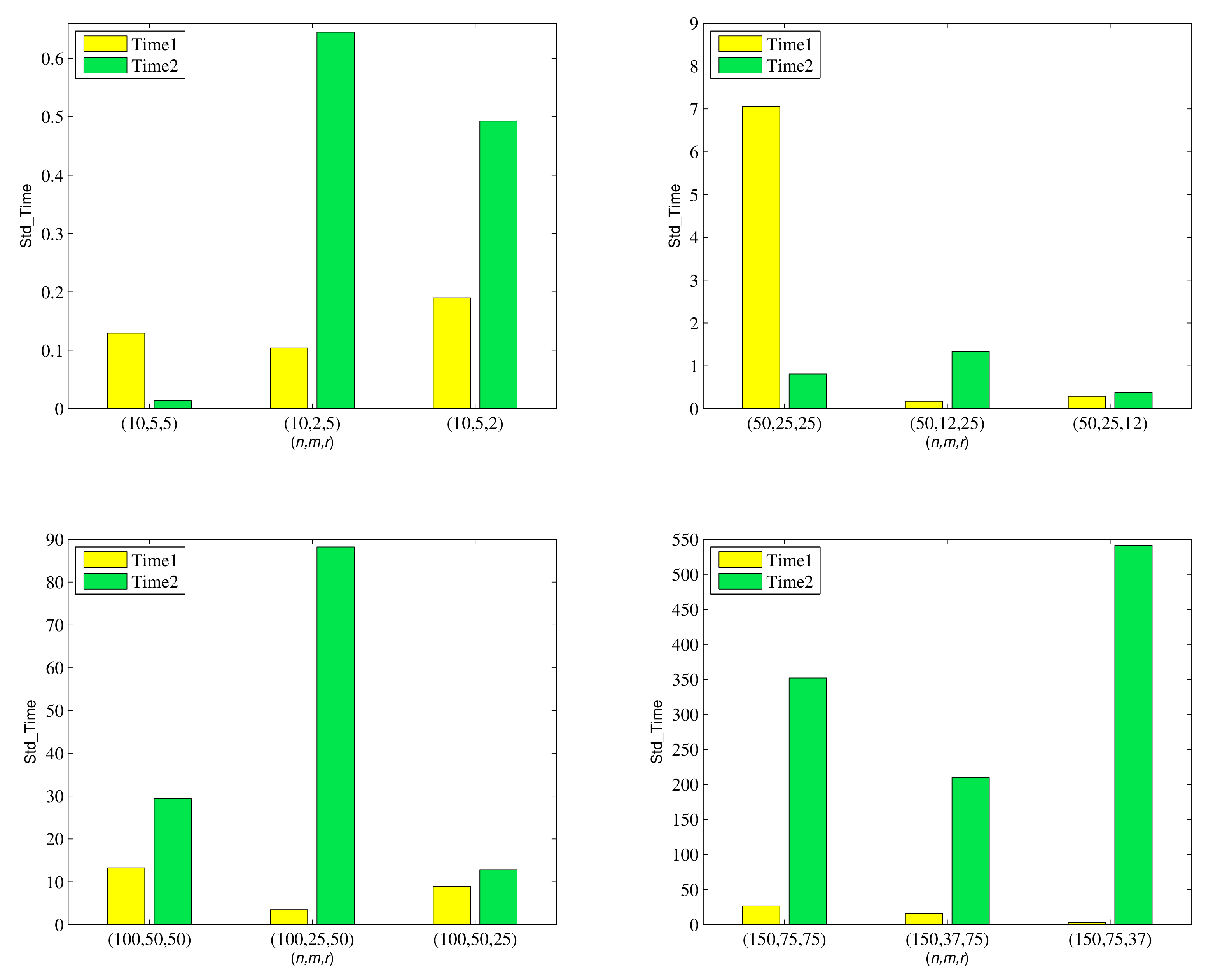
- Time1—CPU time in seconds of Algorithm 1 to obtain the opv.
- ∘
- LB_CP—Value of the lower bound obtained by the CP relaxation (5).
- ∘
- Time2—CPU time in seconds to obtain LB_CP.
- ∘
- “-”—Denotes that the algorithm fails to solve the instance within 10,000 s.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lai, H.C.; Huang, T.Y. Optimality conditions for nondifferentiable minimax fractional programming with complex variables. J. Math. Anal. Appl. 2009, 359, 229–239. [Google Scholar] [CrossRef] [Green Version]
- Stancu-Minasian, I.M. Fractional Programming: Theory, Methods and Applications, 1st ed.; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1997; pp. 6–33. [Google Scholar]
- Cai, H.; Wang, Y.; Yi, T. An approach for minimizing a quadratically constrained fractional quadratic problem with application to the communications over wireless channels. Optim. Method Softw. 2014, 29, 310–320. [Google Scholar] [CrossRef]
- Dinkelbach, W. On nonlinear fractional programming. Manag. Sci. 1967, 13, 492–498. [Google Scholar] [CrossRef]
- Salahi, M.; Fallahi, S. On the quadratic fractional optimization with a strictly convex quadratic constraint. Kybernetika 2015, 51, 293–308. [Google Scholar] [CrossRef] [Green Version]
- Zhang, A.; Hayashi, S. Celis-Dennis-Tapia based approach to quadratic fractional programming problems with two quadratic constraints. Numer. Algebra Control Optim. 2011, 1, 83–98. [Google Scholar] [CrossRef]
- Gotoh, J.Y.; Konno, H. Maximization of the ratio of two convex quadratic functions over a polytope. Comput. Optim. Appl. 2001, 20, 43–60. [Google Scholar] [CrossRef]
- Bezdan, T.; Stoean, C.; Namany, A.A.; Bacanin, N.; Rashid, A.T.; Zivkovic, M.; Venkatachalam, K. Hybrid Fruit-Fly Optimization Algorithm with K-Means for Text Document Clustering. Mathematics 2021, 9, 1929. [Google Scholar] [CrossRef]
- Dong, G.; Liu, C.; Liu, D.; Mao, X. Adaptive multi-level search for global optimization: An integrated swarm intelligence-metamodelling technique. Appl. Sci. 2021, 11, 2277. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A convex optimization approach for minimizing the ratio of indefinite quadratic functions over an ellipsoid. Math. Program. Ser. A 2009, 118, 13–35. [Google Scholar] [CrossRef]
- Xia, Y. Using SeDuMi 1.02, On minimizing the ratio of quadratic functions over an ellipsoid. Optimization 2015, 64, 1097–1106. [Google Scholar] [CrossRef]
- Nguyen, V.B.; Sheu, R.L.; Xia, Y. An SDP approach for quadratic fractional problems with a two-sided quadratic constraint. Optim. Methods Softw. 2016, 31, 701–719. [Google Scholar] [CrossRef]
- Preisig, J.C. Copositivity and the minimization of quadratic functions with nonnegativity and quadratic equality constraints. SIAM J. Control Optim. 1996, 34, 1135–1150. [Google Scholar] [CrossRef]
- Amaral, P.; Bomze, I.M.; Júdice, J. Nonconvex min-max fractional quadratic problems under quadratic constraints: Copositive relaxations. J. Glob. Optim. 2019, 75, 227–245. [Google Scholar] [CrossRef] [Green Version]
- Amaral, P.; Bomze, I.M.; Júdice, J. Copositivity and constrained fractional quadratic problems. Math. Program. 2014, 146, 325–350. [Google Scholar] [CrossRef] [Green Version]
- Sadeghi, A.; Saraj, M.; Amiri, N.M. Solving a fractional program with second order cone constraint. Iran. J. Math. Sci. Inform. 2019, 14, 33–42. [Google Scholar]
- Kim, S.; Kojima, M. Second order cone programming relaxation of nonconvex quadratic optimization problems. Optim. Methods Softw. 2001, 15, 201–224. [Google Scholar] [CrossRef]
- Ben-Tal, A.; Den Hertog, D. Hidden conic quadratic representation of some nonconvex quadratic optimization problems. Math. Program. 2014, 143, 1–29. [Google Scholar] [CrossRef]
- Zhou, J.; Xu, Z. A simultaneous diagonalization based SOCP relaxation for convex quadratic programs with linear complementarity constraints. Optim. Lett. 2017, 13, 1615–1630. [Google Scholar] [CrossRef]
- Zhou, J.; Lu, C.; Tian, Y.; Tang, X. A SOCP relaxation based branch-and-bound method for generalized trust-region subproblem. J. Ind. Manag. Optim. 2021, 17, 151–168. [Google Scholar] [CrossRef] [Green Version]
- Zhou, J.; Chen, S.; Yu, S.; Tian, Y. A simultaneous diagonalization based quadratic convex reformulation for nonconvex quadratically constrained quadratic program. Optimization 2020, in press. [Google Scholar] [CrossRef]
- Liu, X.; Gao, Y.; Zhang, B.; Tian, F. A new global optimization algorithm for a class of linear fractional programming. Mathematics 2019, 7, 867. [Google Scholar] [CrossRef] [Green Version]
- Sturm, J.F. Using SeDuMi 1.02, a MATLAB toolbox for optimization over symmetric cones. Optim. Methods Softw. 1999, 11, 625–653. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| () | SOCP_BB | CP_BB | ||||
|---|---|---|---|---|---|---|
| LB_SOCP | Opv | Nodes | Time1 | LB_CP | Time2 | |
| (10, 5, 5) | −0.4693 | −0.4293 | 13 | 0.6629 | −0.4293 | 0.1494 |
| (10, 5, 5) | −0.8524 | −0.8456 | 7 | 0.4113 | −0.8456 | 0.1662 |
| (10, 5, 5) | −1.2073 | −1.2021 | 6 | 0.3530 | −1.2021 | 0.1501 |
| (10, 5, 5) | −0.9140 | −0.9072 | 6 | 0.3618 | −0.9072 | 0.1524 |
| (10, 5, 5) | −0.7263 | −0.6881 | 9 | 0.5096 | −0.6881 | 0.1816 |
| (50, 25, 25) | −0.7163 | −0.6067 | 143 | 17.3670 | −0.6067 | 4.5898 |
| (50, 25, 25) | −0.7214 | −0.5607 | 98 | 14.3159 | −0.5607 | 3.6403 |
| (50, 25, 25) | −0.7798 | −0.6902 | 18 | 3.1592 | −0.6902 | 3.7478 |
| (50, 25, 25) | −1.0089 | −0.9433 | 25 | 4.8718 | −0.9433 | 5.0656 |
| (50, 25, 25) | −1.2317 | −1.2083 | 5 | 1.7368 | −1.2083 | 5.4888 |
| (100, 50, 50) | −1.0565 | −0.9001 | 13 | 7.9829 | −0.9001 | 250.9022 |
| (100, 50, 50) | −0.9554 | −0.7997 | 30 | 14.5958 | −0.7997 | 194.6950 |
| (100, 50, 50) | −1.0330 | −0.8659 | 42 | 18.6046 | −0.8659 | 170.7346 |
| (100, 50, 50) | −1.1277 | −0.9654 | 92 | 31.8563 | −0.9654 | 203.0717 |
| (100, 50, 50) | −0.8737 | −0.6899 | 134 | 40.4807 | −0.6899 | 214.5695 |
| (150, 75, 75) | −1.0552 | −0.7857 | 120 | 75.8879 | −0.7857 | 2.7118 × 103 |
| (150, 75, 75) | −1.1371 | −0.9424 | 14 | 18.4429 | −0.9424 | 2.9627 × 103 |
| (150, 75, 75) | −1.1903 | −1.0224 | 9 | 17.4320 | −1.0224 | 2.0537 × 103 |
| (150, 75, 75) | −1.0528 | −0.8065 | 94 | 60.9915 | −0.8065 | 2.4712 × 103 |
| (150, 75, 75) | −1.2053 | −0.9654 | 38 | 32.4540 | −0.9654 | 2.3078 × 103 |
| (200, 100, 100) | −1.2726 | −0.9486 | 179 | 187.0444 | - | - |
| (200, 100, 100) | −1.2393 | −0.9090 | 91 | 109.7111 | - | - |
| (200, 100, 100) | −1.1200 | −0.8023 | 499 | 487.9172 | - | - |
| (200, 100, 100) | −1.3677 | −1.0641 | 65 | 80.6285 | - | - |
| (200, 100, 100) | −1.1613 | −0.8508 | 185 | 192.5417 | - | - |
| () | SOCP_BB | CP | ||||
|---|---|---|---|---|---|---|
| LB_SOCP | Opv | Nodes | Time1 | LB_CP | Time2 | |
| (10, 2, 5) | −0.9896 | −0.9603 | 5 | 0.6060 | −0.9603 | 1.5734 |
| (10, 2, 5) | −0.8272 | −0.7923 | 5 | 0.4432 | −0.7923 | 0.1278 |
| (10, 2, 5) | −0.8851 | −0.8439 | 5 | 0.4632 | −0.8439 | 0.1386 |
| (10, 2, 5) | −1.3820 | −1.3796 | 2 | 0.3577 | −1.3796 | 0.1269 |
| (10, 2, 5) | −1.0857 | −1.0510 | 5 | 0.5859 | −1.0510 | 0.1302 |
| (50, 12, 25) | −1.7140 | −1.6777 | 5 | 3.1569 | −1.6777 | 17.7567 |
| (50, 12, 25) | −1.7958 | −1.7291 | 6 | 2.9847 | −1.7291 | 14.3435 |
| (50, 12, 25) | −1.4860 | −1.3408 | 6 | 2.8456 | −1.3408 | 17.1463 |
| (50, 12, 25) | −1.8775 | −1.7996 | 6 | 2.8528 | −1.7996 | 15.5760 |
| (50, 12, 25) | −1.6074 | −1.5496 | 5 | 2.7021 | −1.5496 | 16.3399 |
| (100, 25, 50) | −1.5728 | −1.3367 | 26 | 19.3778 | −1.3367 | 0.9316 × 103 |
| (100, 25, 50) | −1.8812 | −1.7798 | 8 | 11.3498 | −1.7798 | 1.0162 × 103 |
| (100, 25, 50) | −1.7331 | −1.5541 | 8 | 11.3676 | −1.5541 | 1.0123 × 103 |
| (100, 25, 50) | −2.3014 | −2.2407 | 7 | 12.3799 | −2.2407 | 1.0646 × 103 |
| (100, 25, 50) | −1.7297 | −1.5881 | 8 | 11.4687 | −1.5881 | 0.8403 × 103 |
| (150, 37, 75) | −2.2469 | −2.1016 | 8 | 32.4534 | - | - |
| (150, 37, 75) | −2.0106 | −1.7806 | 8 | 32.4796 | - | - |
| (150, 37, 75) | −2.0413 | −1.8458 | 7 | 32.4477 | - | - |
| (150, 37, 75) | −1.8265 | −1.5324 | 41 | 67.4079 | - | - |
| (150, 37, 75) | −1.7998 | −1.5960 | 8 | 36.5955 | - | - |
| (200, 50, 100) | −1.9059 | −1.5500 | 127 | 282.0235 | - | - |
| (200, 50, 100) | −2.0762 | −1.7748 | 8 | 57.7022 | - | - |
| (200, 50, 100) | −1.9991 | −1.6971 | 8 | 55.1303 | - | - |
| (200, 50, 100) | −1.7675 | −1.2039 | 81 | 202.9095 | - | - |
| (200, 50, 100) | −2.0341 | −1.7518 | 9 | 63.0475 | - | - |
| () | SOCP_BB | CP | ||||
|---|---|---|---|---|---|---|
| LB_SOCP | Opv | Nodes | Time1 | LB_CP | Time2 | |
| (10, 5, 2) | −0.5666 | −0.5666 | 1 | 0.4499 | −0.5666 | 1.2285 |
| (10, 5, 2) | −0.3186 | −0.2993 | 11 | 0.6461 | −0.2993 | 0.1261 |
| (10, 5, 2) | −0.6271 | −0.6271 | 1 | 0.2275 | −0.6271 | 0.1175 |
| (10, 5, 2) | −0.4529 | −0.4509 | 5 | 0.3733 | −0.4509 | 0.1193 |
| (10, 5, 2) | −1.3076 | −1.3076 | 1 | 0.1667 | −1.3076 | 0.1448 |
| (50, 25, 12) | −0.9542 | −0.9241 | 5 | 1.7985 | −0.9241 | 4.0500 |
| (50, 25, 12) | −0.7892 | −0.7576 | 10 | 2.3463 | −0.7576 | 3.4063 |
| (50, 25, 12) | −1.1374 | −1.0829 | 10 | 2.3780 | −1.0829 | 4.0707 |
| (50, 25, 12) | −0.9922 | −0.9727 | 5 | 1.8784 | −0.9727 | 4.0418 |
| (50, 25, 12) | −1.2224 | −1.2045 | 5 | 1.8484 | −1.2045 | 3.3520 |
| (100, 50, 25) | −0.8275 | −0.7157 | 37 | 15.6906 | −0.7157 | 189.7557 |
| (100, 50, 25) | −0.9672 | −0.8460 | 7 | 7.6640 | −0.8460 | 210.9579 |
| (100, 50, 25) | −0.8787 | −0.7226 | 19 | 9.3551 | −0.7226 | 182.1559 |
| (100, 50, 25) | −0.6688 | −0.4729 | 86 | 27.5411 | −0.4729 | 203.2400 |
| (100, 50, 25) | −1.1576 | −1.0850 | 5 | 5.4911 | −1.0850 | 182.8251 |
| (150, 75, 37) | −0.9557 | −0.7539 | 21 | 22.3072 | −0.7539 | 2.2003 × 103 |
| (150, 75, 37) | −1.0578 | −0.8889 | 9 | 15.3286 | −0.8889 | 2.6835 × 103 |
| (150, 75, 37) | −1.0882 | −0.8889 | 15 | 19.1659 | −0.8889 | 2.1471 × 103 |
| (150, 75, 37) | −0.9347 | −0.7677 | 17 | 20.8678 | −0.7677 | 3.4121 × 103 |
| (150, 75, 37) | −0.9359 | −0.7475 | 24 | 22.9717 | −0.7475 | 2.1899 × 103 |
| (200, 100, 50) | −0.9704 | −0.7321 | 45 | 67.2220 | - | - |
| (200, 100, 50) | −1.3138 | −1.1077 | 5 | 26.8615 | - | - |
| (200, 100, 50) | −0.9420 | −0.6978 | 158 | 180.3040 | - | - |
| (200, 100, 50) | −0.9998 | −0.7981 | 40 | 62.2748 | - | - |
| (200, 100, 50) | −0.9535 | −0.6954 | 264 | 298.8807 | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Zhou, J. A Global Optimization Algorithm for Solving Linearly Constrained Quadratic Fractional Problems. Mathematics 2021, 9, 2981. https://doi.org/10.3390/math9222981
Xu Z, Zhou J. A Global Optimization Algorithm for Solving Linearly Constrained Quadratic Fractional Problems. Mathematics. 2021; 9(22):2981. https://doi.org/10.3390/math9222981
Chicago/Turabian StyleXu, Zhijun, and Jing Zhou. 2021. "A Global Optimization Algorithm for Solving Linearly Constrained Quadratic Fractional Problems" Mathematics 9, no. 22: 2981. https://doi.org/10.3390/math9222981
APA StyleXu, Z., & Zhou, J. (2021). A Global Optimization Algorithm for Solving Linearly Constrained Quadratic Fractional Problems. Mathematics, 9(22), 2981. https://doi.org/10.3390/math9222981