1. Introduction
As sensor networks become widespread, large databases of geo-referenced time series are increasingly available. Machine learning models are needed in order to leverage these data to guide decisions in real-world applications, from air and water quality monitoring [
1] to photovoltaic energy production forecasting [
2]. These models must be able to produce accurate predictions of future numeric values at multiple geographical locations, but progress in their predictive ability can only be achieved if we can trust our estimations of their performance.
The problem of estimating the performance of any forecasting model on unseen data is, therefore, at the core of predictive analytics. In effect, estimation methods address two relevant challenges faced by analysts: (i) to provide end-users with reliable estimates of the future performance of the models; and (ii) to help analysts in selecting the best possible prediction model from an ever increasing set of available alternatives. Performance estimation involves addressing two questions: (i) which evaluation metrics are an appropriate fit to the application domain; and (ii) how to best use valuable data in order to obtain accurate estimates of these metrics. This paper focuses on the latter question, in the context of forecasting with geo-referenced time series data. The answer is not always obvious. Indeed, standard performance estimation methods such as cross-validation (CV) often assume observations in the training and test sets to be independent [
3]. The presence of spatial and temporal autocorrelation means that this assumption will not hold for spatiotemporal data, and it may lead to overly optimistic loss estimates.
Machine learning performance estimation procedures can be classified into two main classes of methods, both widely used: out-of-sample (OOS) estimation and CV strategies.
Hold-out validation is the simplest OOS estimator. It operates by splitting the data into a training set, used to learn a model, and a test set, used to estimate the loss of the learned model in “unseen” data [
4]. In forecasting, only OOS procedures that respect the underlying order of the data may be considered (e.g., in data ordered by time, such as time series, the test set is always comprised of the more recent observations). These approaches are sometimes called “last-block” procedures [
5].
In CV, the available data are split into several equally sized blocks and these blocks are combined in different ways to generate diverse training sets and test sets. Estimates of performance are obtained by averaging the test-set losses over the several train+test splits [
6]. The way the blocks are combined is such that it allows the whole dataset to be used in the test set at least once. The data may be split in an exhaustive or partial manner, with partial splitting often being more computationally viable. The classical example of exhaustive splitting is leave-one-out cross-validation (LOOCV) where each observation plays the role of test set once and is used as part of the training set for all other observations. A common way to partially split the data is to divide them into
K subsets of approximately the same size, and then having each subset successively used as test set with all remaining partitions (or folds) used for training—this strategy is referred to as
K-fold CV [
7]. However, standard CV procedures such as this assume that each test set is independent from the training set, which does not hold for many types of datasets, such as time series [
3]. Several variations of CV procedures that do not require independence between sets have been proposed, with most of them being geared toward a time series setting [
8,
9,
10]. Some of these methods have been proposed for spatiotemporal settings [
11].
Previous empirical studies about performance estimation methodologies in the presence of dependencies have focused on either temporal [
5,
12,
13,
14] or spatial data [
15]. Meyer et al. [
11] compared three different cross-validation methods for spatiotemporal interpolation. However, to the best of our knowledge, the work [
16] we extend in this paper is the first to provide an exhaustive empirical study of both out-of-sample and cross-validation estimation methods for spatiotemporal forecasting tasks.
Our study aims at: (i) providing a review of estimation strategies in the presence of spatiotemporal dependencies; and (ii) investigating how accurately different cross-validation and out-of-sample strategies estimate the predictive performance of models. We perform our study in a geo-referenced time series forecasting setting. Accuracy of error estimates is obtained by comparing the loss estimated by several procedures against the loss measured in previously withheld data acting as a kind of gold standard. In our empirical comparisons, we consider over 15 variations of error estimation procedures, using both artificial and real-world datasets. In this extended version, we report on new experiments using additional artificial data sets and learning models, provide better descriptions of data sets and methods, and present additional analysis and a deeper discussion of our results.
Next, we provide an overview of performance estimation methods that have been proposed for temporal, spatial and spatiotemporal data.
1.1. Performance Estimation with Spatiotemporal Dependence Structures
Observations that have been made at different times and/or at neighbouring locations may be related through internal dependence structures within datasets, as there is a tendency for values of close observations (in terms of either measurement time or location, or both) to be more similar (or otherwise related) than distant ones. This is expected as most measured phenomena have some sort of continuity or smoothness, with abrupt changes being less common or unexpected. For instance, the measured amount of rain at time t on location x is probably correlated with the rain levels at nearby locations or at recent time stamps.
The possibility of dependence among observations may lead to dependence between observations used to train the predictive models and the observations used to test them. This in turn may lead to overly optimistic estimates of the loss a model will incur when presented with previously unseen, independent data, and it may also lead to structural overfitting and poor generalisation ability [
15]. In fact, more than one study has proven that CV overfits for choosing the bandwidth of a kernel estimator in regression [
17,
18].
1.1.1. Temporal Dependence
Several performance estimation methods specifically designed to deal with temporal dependency have been proposed in the past.
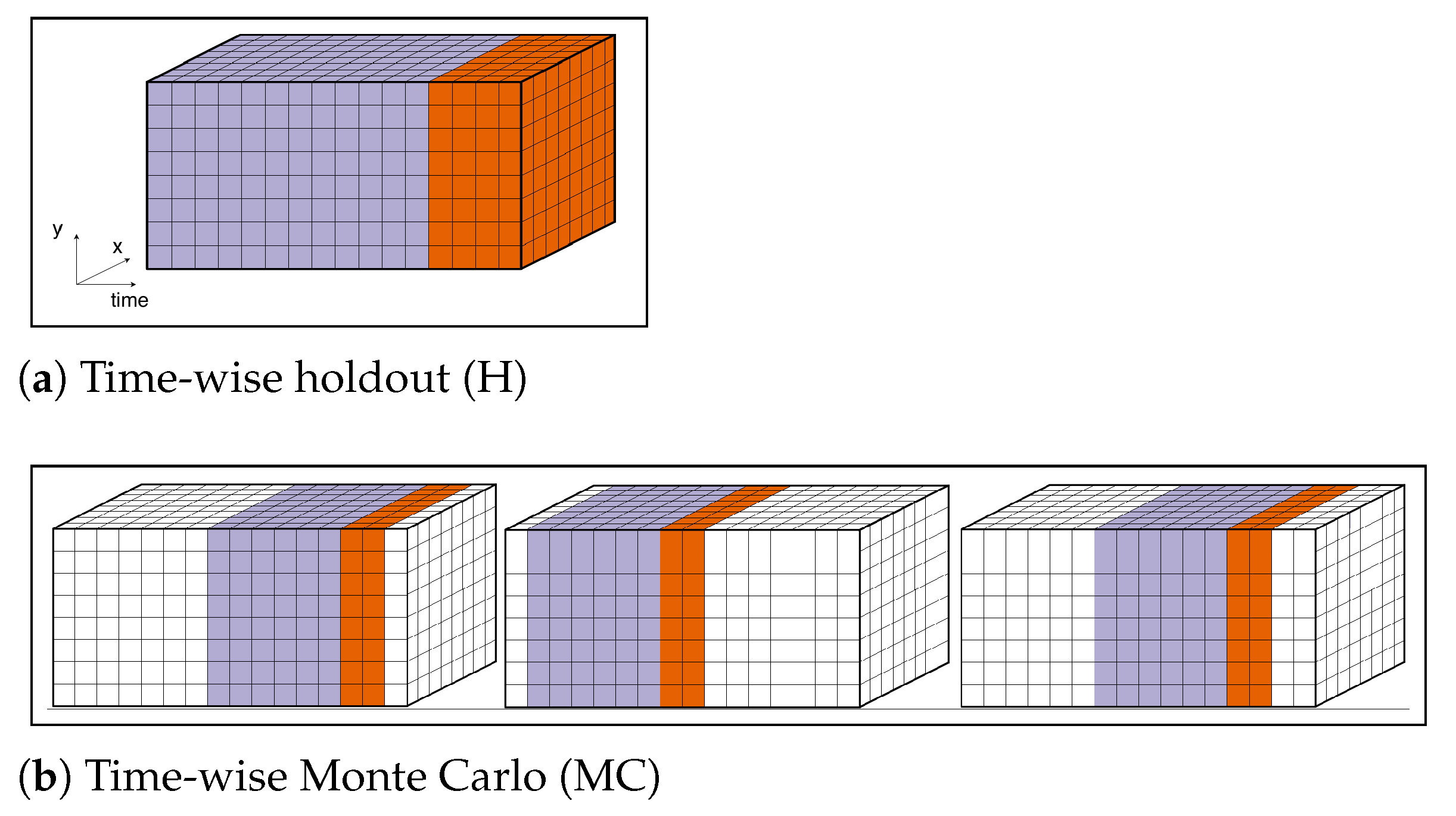
In terms of OOS procedures in time series settings, decisions must be made regarding the split point between training/test sets and how long a time-interval to include in both the training and testing sets. Two approaches are worth mentioning: (a) Repeated time-wise holdout involves repeating a holdout procedure over different periods of time so that loss estimates are more robust, as advised in [
19]. The selection of split points for each repetition of holdout may be randomised, with a window of preceding observations used for training and a fraction of the following instances used for testing. Training and test sets may potentially overlap across repetitions, similarly to random sub-sampling. These are also referred to as Monte Carlo experiments [
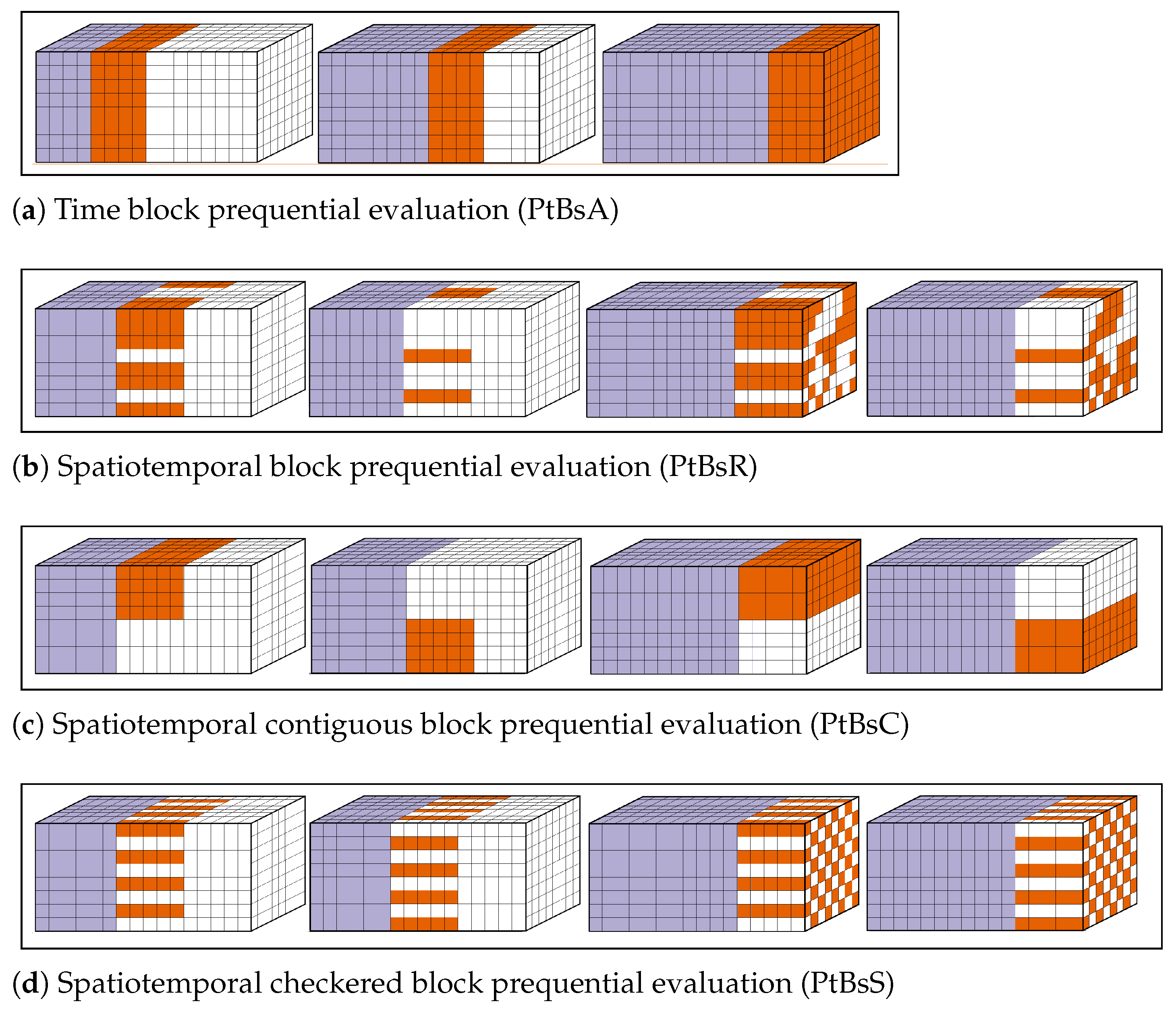
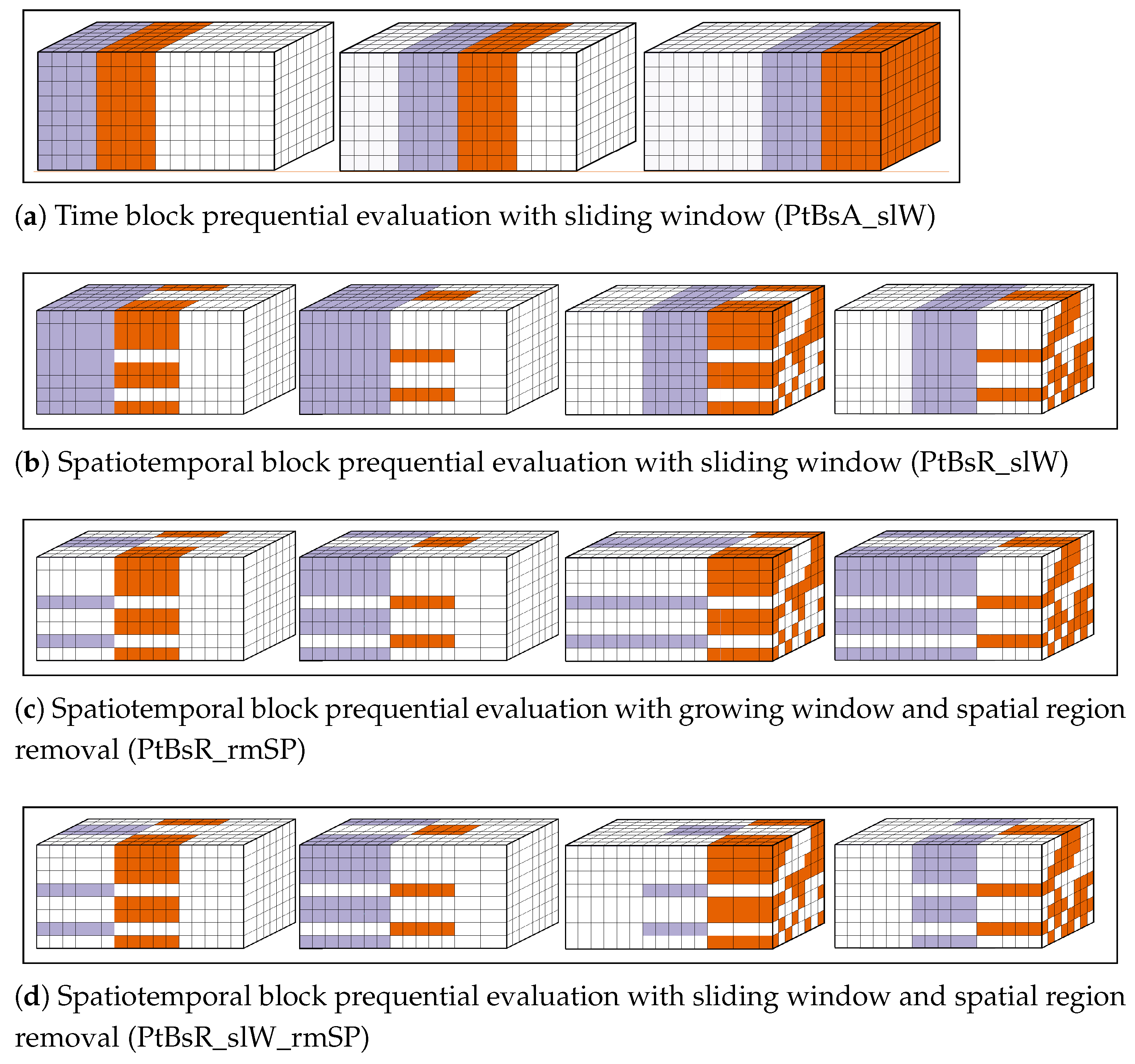
20]. (b) Prequential evaluation or interleaved-test-then-train evaluation is often used in data stream mining. Each observation (or block of non-overlapping observations) is first used to test and then to train the model [
21] in a sequential manner. The term prequential usually refers to the case where the training window is growing, i.e., a block of observations that is used for testing in one iteration will be merged with all previous training blocks and used for training in the next iteration.
Four alternatives to standard CV proposed for time series should be highlighted: (a) Modified CV is similar to
K-fold CV, except that
l observations preceding and following the observation(s) in the test set are discarded from the training set after shuffling and fold assignment [
8]. This method is also referred to as non-dependent cross-validation in [
5]. (b) Block CV is a procedure similar to
K-fold CV where, instead of the observations being randomly assigned to folds, each fold is a sequential, non-interrupted time series [
22]. (c)
h-block CV is based on LOOCV, except
h observations preceding and following the observation in the test set are removed from the training set [
9]. (d)
-block CV is a modification of
h-block CV where, instead of having single observations as test sets, a block of
v observations preceding and following each observation is used for testing (causing test sets to overlap), with
h observations before and after each block being removed from the training set [
10].
Note that, while, in all types of block-CV, each test set is composed of a sequential non-interrupted time series (or a single observation), a fold in modified CV will almost certainly have non-sequential observations. If K is set to the number of observations in modified CV, then it works the same as h-block CV. Moreover, note that only -block CV allows test sets to overlap.
Several empirical studies have compared estimation methods for time series. Bergmeir et al. [
5,
12] suggested that cross-validation (in particular,
-block CV) may have advantage over OOS approaches, especially when samples are small and the series stationary. Cerqueira et al. [
13] indicated that, although this might be valid for synthetic time series, the same might not apply in real-world scenarios where methods preserving the order of the series (such as OOS Monte Carlo) seem to better estimate loss in withheld data. Mozetic et al. [
14] reinforced the notion that temporal blocking is important for time-ordered data.
1.1.2. Spatial Dependence
A major change when switching from temporal dependence to spatial dependence is that there is not a clear unidirectional ordering of data in 2D- or 3D-space as there is in time. This precludes using prequential evaluation strategies in the spatial domain. However, other strategies can be adapted quite straightforwardly to deal with spatial dependence.
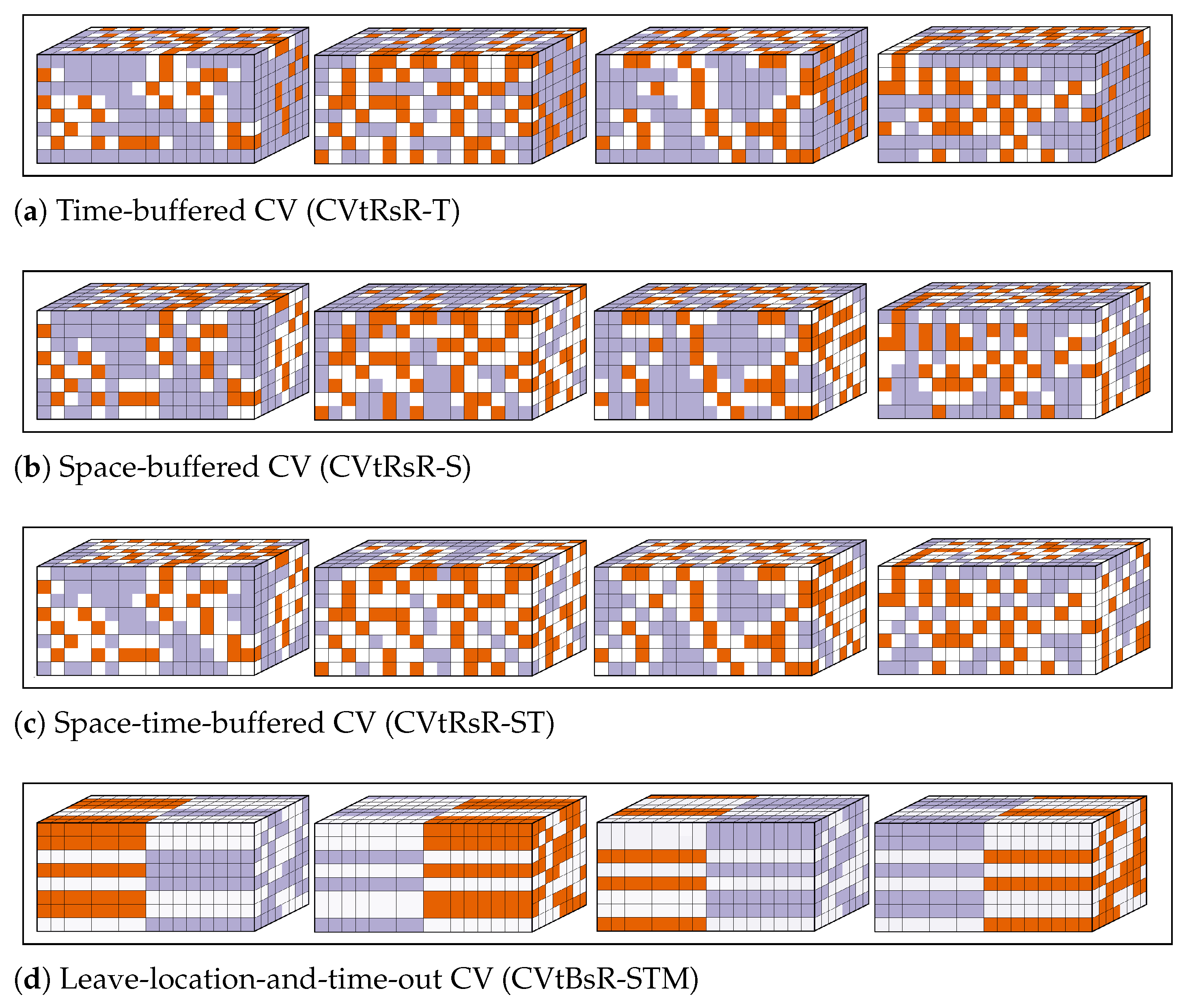
Cross-validation approaches seem to be most commonly used in spatial settings. To avoid the problems arising from spatial dependence, block CV is often adopted. As in the temporal case, blocks can be designed to include neighbouring geographic points, forcing testing on more spatially distant records, and thus decreasing spatial dependence and reducing optimism in error estimates [
23]. Methods that would correspond to
h-block or
-block CV are usually referred to as “buffered” CV in the spatial domain as a geographic vicinity of the testing block is removed from the training set.
The validity of these procedures was empirically tested by Roberts et al. [
15]. They found that block CV (with a block size substantially larger than residual autocorrelation) and “buffered” LOOCV (a spatial version of
h-block CV, with
h equivalent to the distance at which residual autocorrelation is zero) better approximate the error obtained when predicting onto independent simulations of species abundances data depending on spatially autocorrelated “environmental” variables.
1.1.3. Spatiotemporal Dependence
When both spatial and temporal structures are present in the data, authors often resort to one of the procedures described in the previous sections, effectively treating the data as if they were spatial-only (e.g., [
24]) or temporal-only (e.g., [
2,
25]) for evaluation purposes. Others, while treating the problem mostly from a temporal perspective, then make an effort towards breaking down the results across space (e.g., [
26]), or vice-versa (e.g., [
27]), without the evaluation procedure itself being specifically designed to accommodate this.
In [
15], no experimental results are presented specifically for spatiotemporal data, but there is mention of data often being structured in both space and time in the context of avoiding extrapolation in cross-validation. When models are only meant to interpolate, the provided intuitions are that blocks should be no larger than necessary, models should be trained with as many data as possible, and predictors should be equally represented across blocks or folds. While conservatively large blocks can help avoid overly optimistic error estimates, the potential for introducing extrapolation is also increased. It is suggested that this effect may be mitigated by using “optimised random” or systematic (patterned) assignment of blocks to folds. Roberts et al. [
15] also provided a general guide on blocking for CV, proposing the following five steps: assess dependence structures in the data, determine prediction objectives, block according to objectives and structure, perform cross-validation, and make “final” predictions.
Recent work by Meyer et al. [
11] highlights how, for spatiotemporal interpolation problems, the results of conventional CV differ from the results of what they call “target-oriented” CV (versions of CV that address each and/or both dimensions, namely, “leave-location-out”, “leave-time-out” and “leave-location-and-time-out”). The authors attributed the lower error estimated by conventional CV to spatiotemporal over-fitting of the models and propose a forward feature selection procedure to improve interpolation results.
The applicability of solutions that consider the temporal and/or spatial auto-correlation is worth exploring, but the optimal strategy will depend on the modeling goal. It is important to make the distinction, as previous works have, between interpolation and forecasting problems. Unlike previous work on spatiotemporal data, the focus of this study is on forecasting, meaning that the aim is to make predictions about the future/new locations. Even after that is established, it may still be the case that the best evaluation procedure when the goal is to make predictions about unseen locations might differ from the best strategy when the aim is to make predictions in known sites.
3. Results
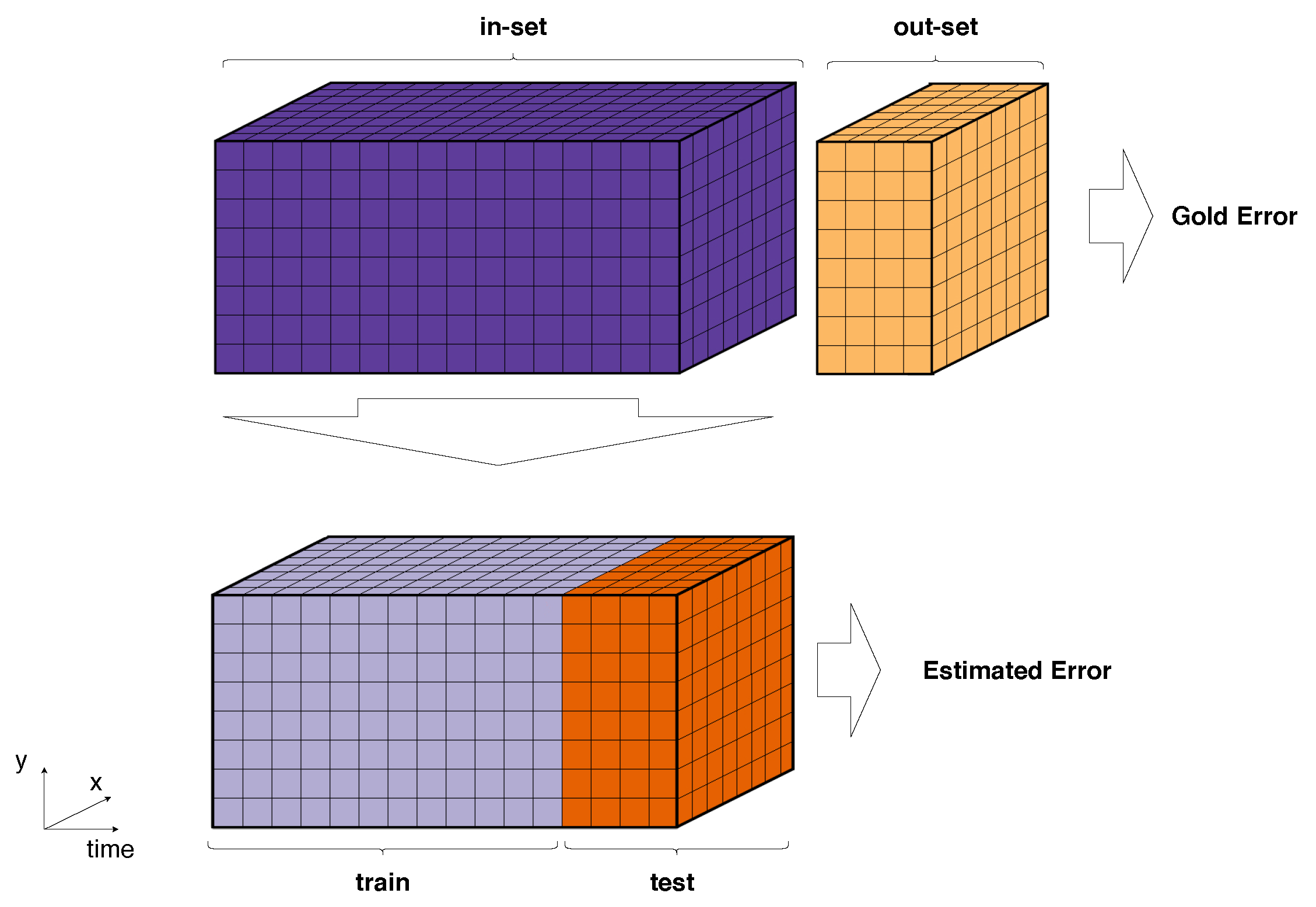
The estimation error is defined as the difference between the error estimated by a procedure using the in-set, , and the “gold standard” error incurred on the out-set, , . Note that experiments with methods that rely on non-random spatial blocking were not carried out using real-world datasets due to issues arising from irregular spatial distributions. Time-buffering without time-blocking in real-world scenarios caused issues related with buffer size/neighbourhood radius. Results for variations of prequential evaluation using sliding window and/or removing locations in the test set from the training set are not reported as they were consistently out-performed by their growing window counterparts (although the difference was not statistically significant).
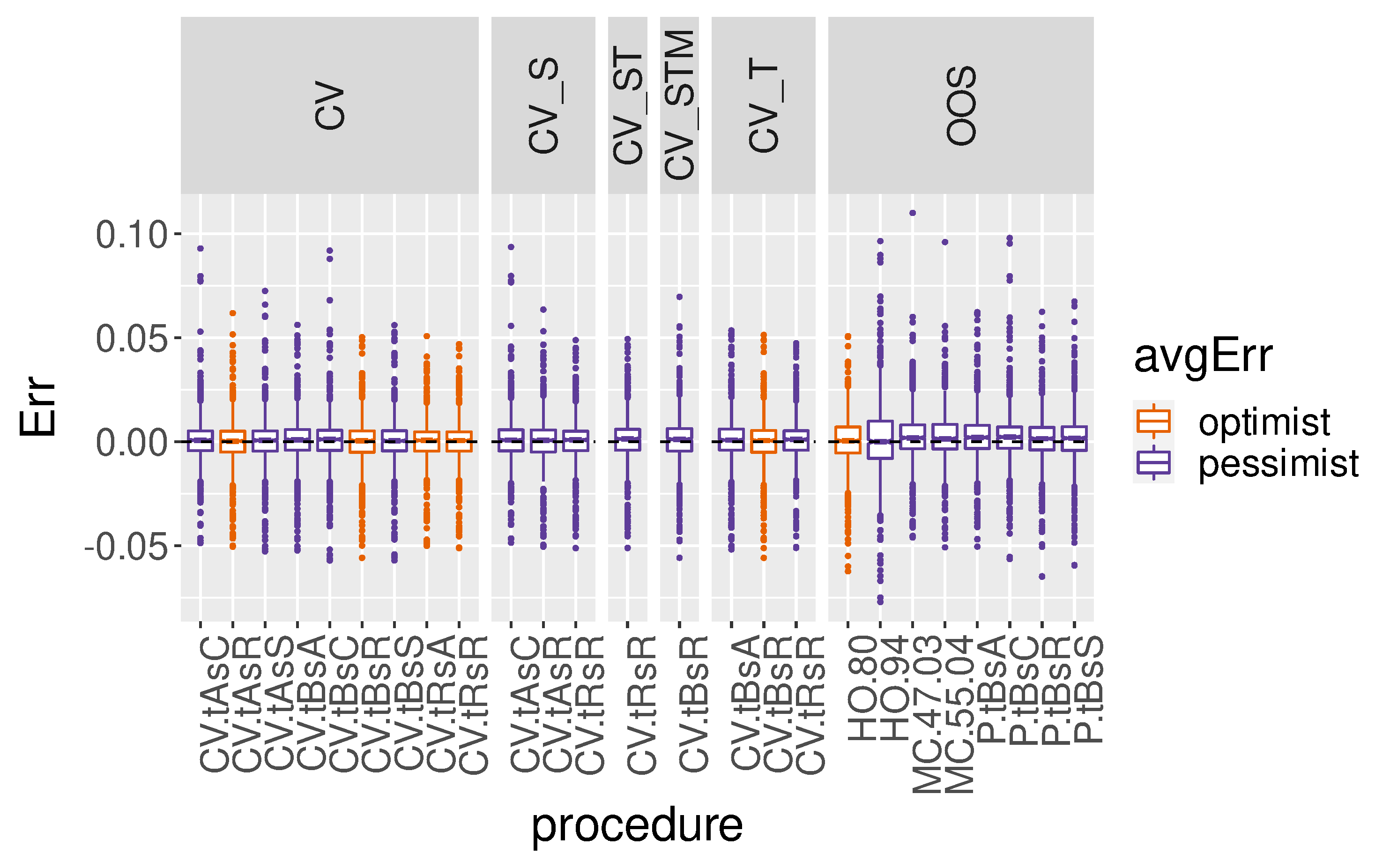
3.1. Median Errors
Figure 10 and
Figure 11 show the distribution of estimation errors for artificial and real-world datasets. The sign of the error indicates whether the estimates (the median errors obtained across test sets for each dataset and learning model pair) produced by a procedure underestimate or overestimate the error. The box plots show the median errors incurred by each method, but the boxes are coloured according to the average error obtained by each method. A procedure that produces average errors below zero, underestimating error, is considered overly optimistic.
In
Figure 10, all procedures appear centred around zero. However, three of the cross-validation procedures underestimate the median error, on average, even when using some form of block CV. This effect is usually mitigated when a type of buffering is applied (temporal, spatial or spatiotemporal). Most OOS procedures overestimate the error, on average, with the exception of holdout at 80%.
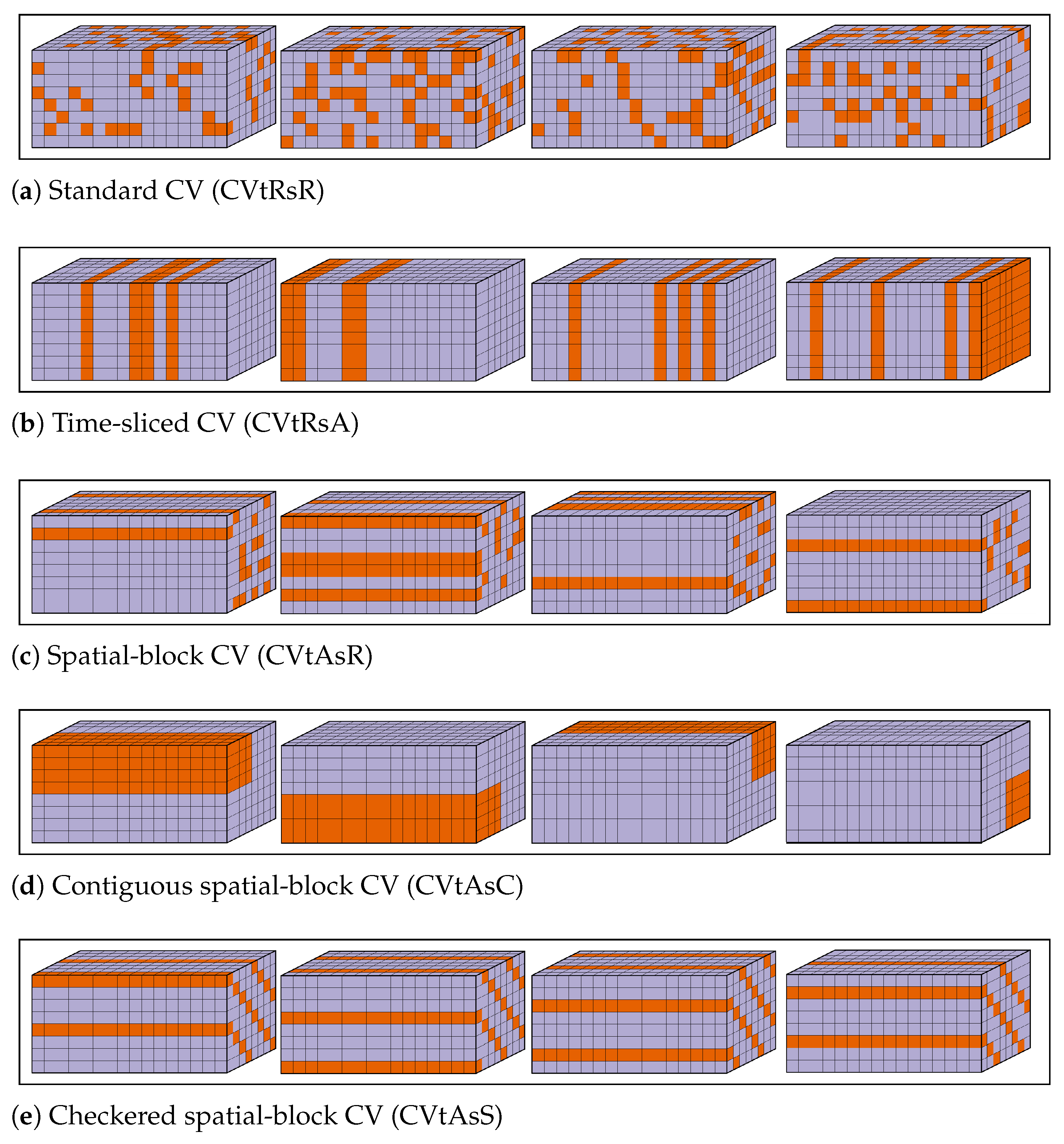
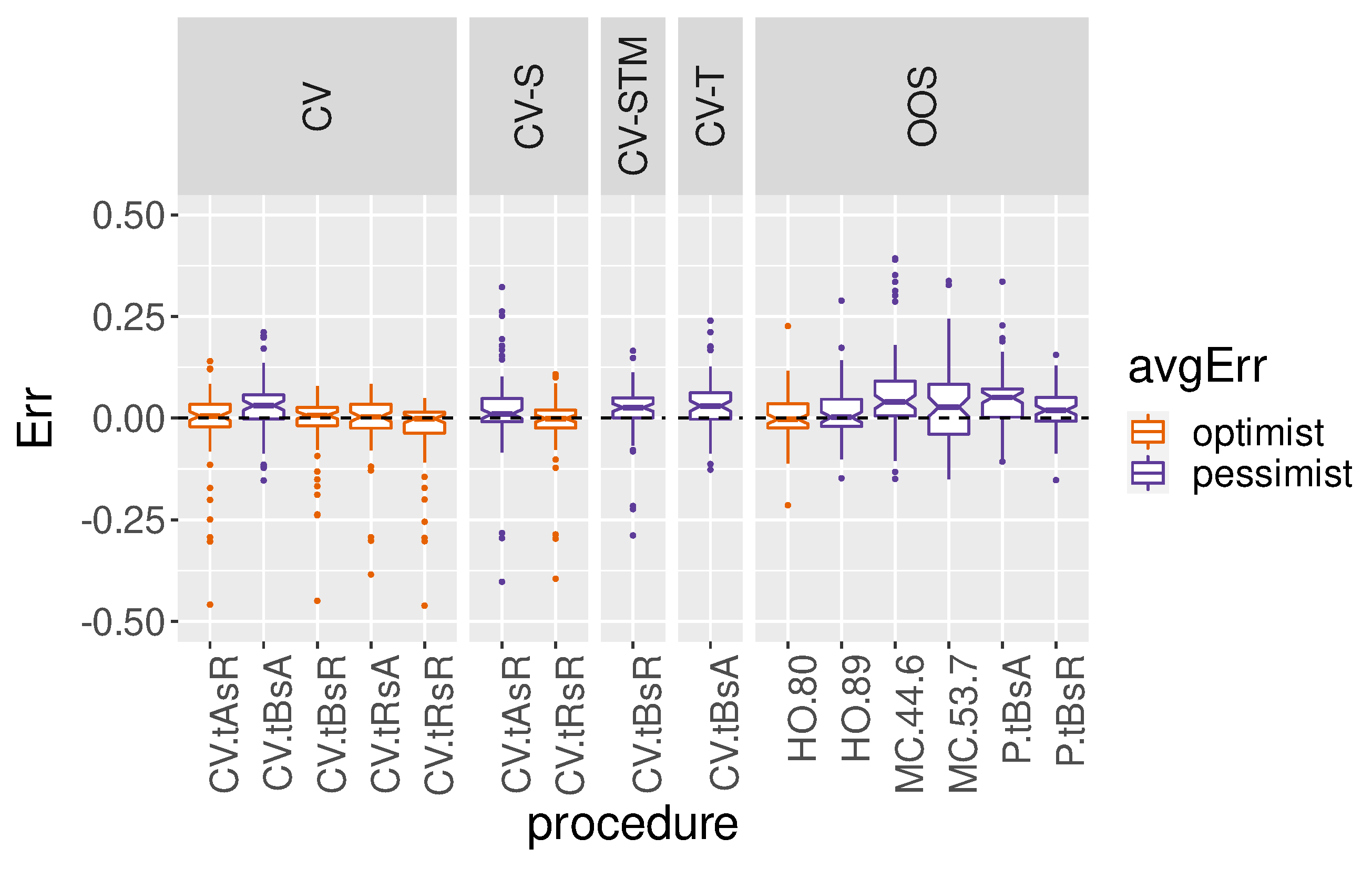
Figure 11 shows larger differences between procedures. Is is important to note that standard CV (
CVtRsR) underestimates the error in over 55% of cases. We observe this problem even after applying a spatial buffer. Note that spatial-buffered CV estimates were not obtained for a fraction of real datasets due to problems associated with the irregularity of sensor network locations.
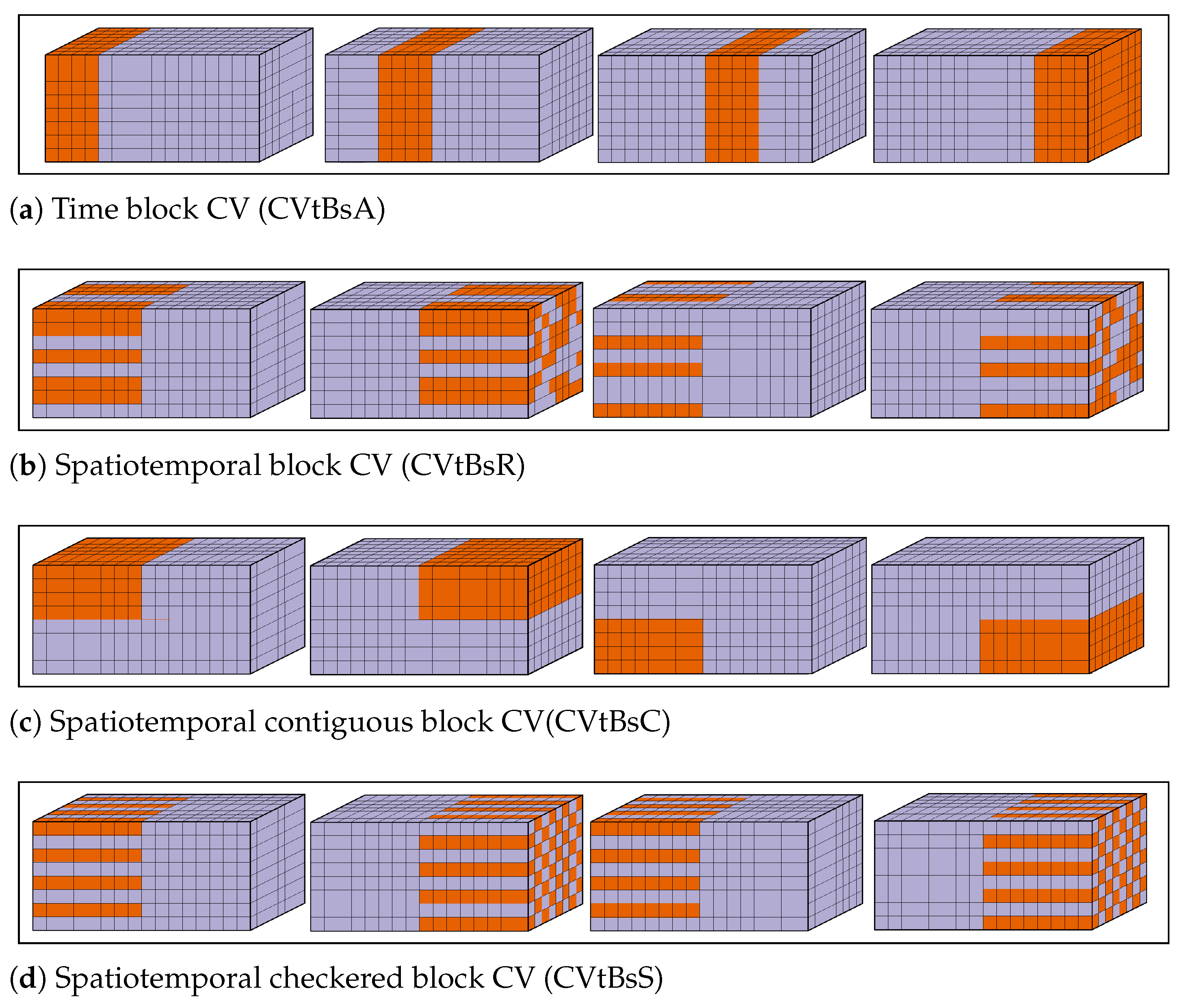
Spatial block CV (CVtAsR), time-sliced CV (CVtRsA) and spatiotemporal block CV (CVtBsR) are also overly optimistic, on average, in their error estimates. However, OOS procedures, temporal-block CV and other variations of block CV using buffers seem to be less prone to underestimate the error.
3.2. Relative Errors
Other useful metrics to analyse are the relative absolute error as defined by
and the relative error as defined by
.
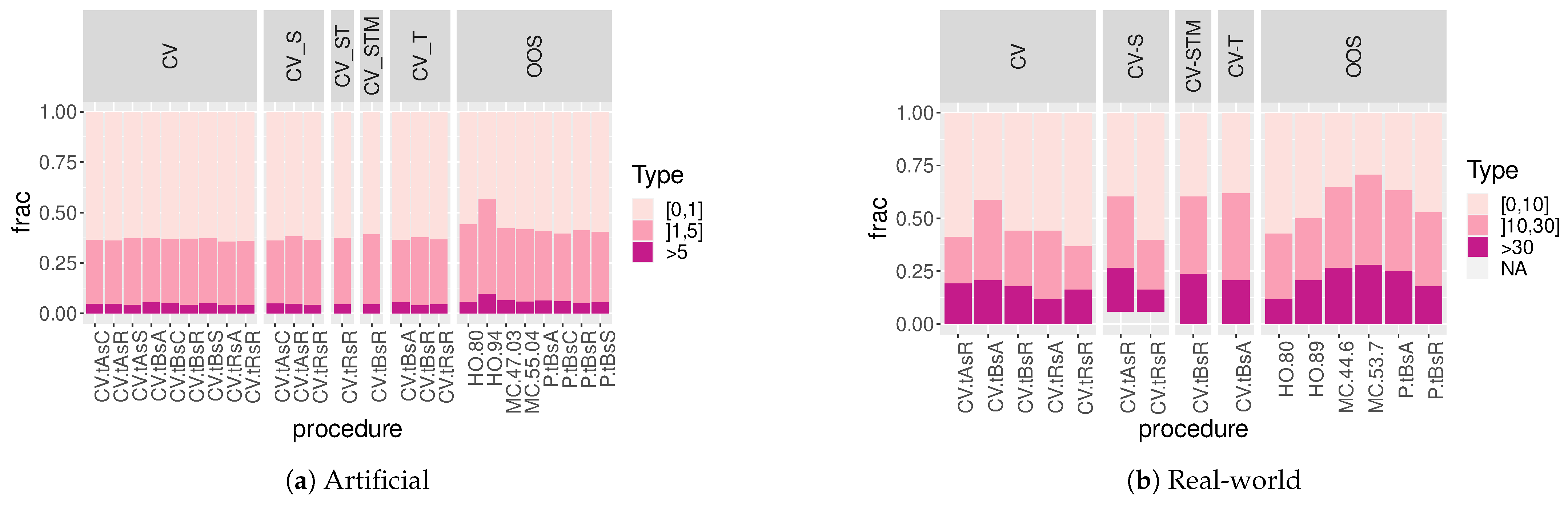
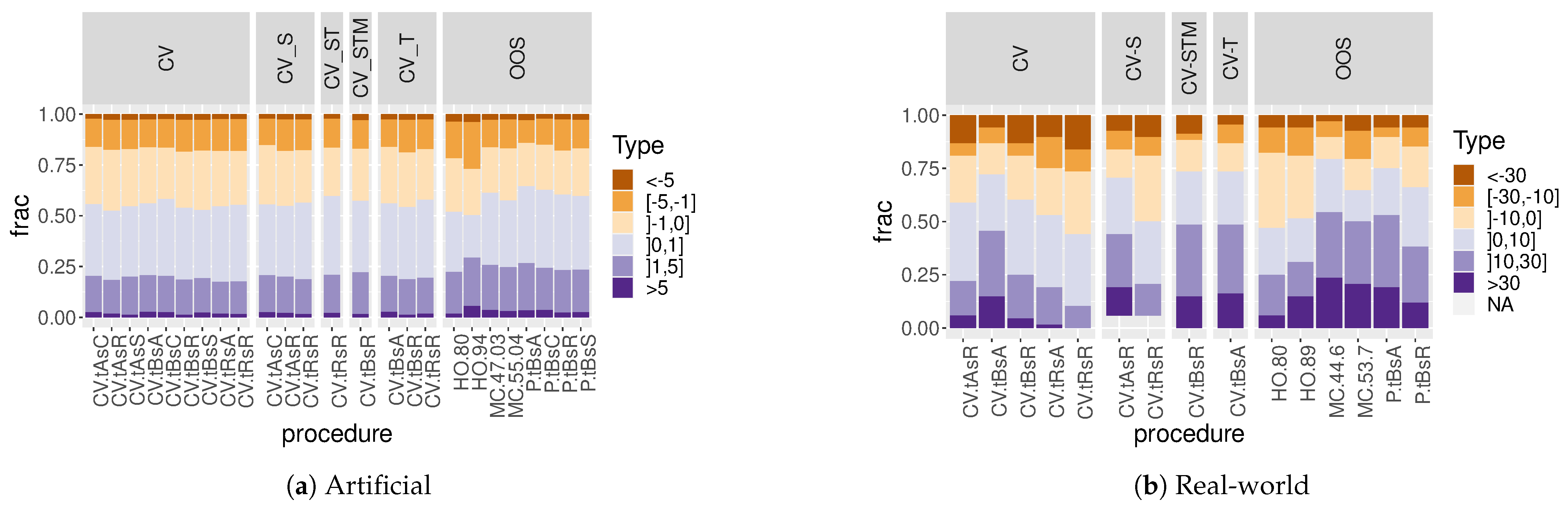
Figure 12 and
Figure 13 show the distribution of low, moderate and high errors and absolute errors. The binning is somewhat arbitrary but chosen so that comparisons might be useful.
In
Figure 12a, we can see that all methods are quite accurate in their estimations: high relative absolute errors (defined as an estimated error that differs from the gold standard error by more than 5%) represent less than 10% of the results regardless of the method used, and almost all methods are able to estimate NMAE with low relative error (defined by not exceeding 1% of difference to the gold standard) in more than 50% of cases—the only exception being holdout (
).
Figure 13a breaks these errors down so optimistic errors can be distinguished from pessimistic errors. Although there are larger differences between methods when we consider the direction of the errors, they still behave quite similarly. However, as shown in the previous section, cross-validation methods tend to have a slightly higher proportion of optimistic estimations than most out-of-sample methods (except holdout).
In real-world scenarios (
Figure 12b and
Figure 13b), relative estimation errors are generally higher, and bins were chosen accordingly, so high relative absolute errors were defined as those that differ from the “gold standard” error by more than 30% instead of just 5% for artificial data. Even allowing for this higher tolerance for what may be considered a medium or small relative error, the evaluation procedures still show a higher proportion of high errors in these real-world scenarios than in the artificial datasets, with more than one method incurring in medium or high relative errors in more than half the cases. Here,
MC procedures show the highest proportions of severe relative error, but some other methods are not far behind. If we take into account whether these errors tend to be overly optimistic or pessimistic, as in
Figure 13b, we find even more contrast between different methods. It is clear in this figure that standard CV (
CVtRsR), while avoiding higher overestimations of error, presents the highest fraction of highly optimistic errors, and the highest proportions of optimistic errors in general (closely followed by holdout). If using cross-validation methods, large proportions of highly optimistic errors are best avoided by blocking data in time (
CVtBsA and
CVtBsA_T) or using time slices (
CVtRsA). However, using temporal block CV comes at the cost of larger proportions of highly pessimistic estimations, akin to the results obtained by using OOS methods other than 80/20 holdout.
3.3. Absolute Errors
Finally, we present results concerning the absolute errors incurred by estimation procedures, that is,
. The mean ranks for artificial datasets can be found in
Table 4. Although standard CV has the best average rank overall, the top performers for other models include spatial-block CV (
CVtRsA), for MARS and LM, and time-slice CV (
CVtAsR) when using RPART.
Time-slice CV () and standard CV () are two procedures that can be found within the top 5 average ranks for all four learning models. Within OOS procedures, spatiotemporal checkered-block prequential evaluation () is the only method that can be found within the top 3 average ranks for all learning models, and it also presents the best overall average rank.
Table 5 shows average ranks for real-world datasets. Standard CV achieves the overall best rank. However, it does not rank within the top 5 best results when using RF. Only spatiotemporal block CV (
) and space-buffered standard CV (
) are within the top 5 average rank of all learning models. The top 3 OOS procedures are consistently spatiotemporal block prequential evaluation (
) and holdout (
and
) across all learning methods, with
having the best overall average rank.
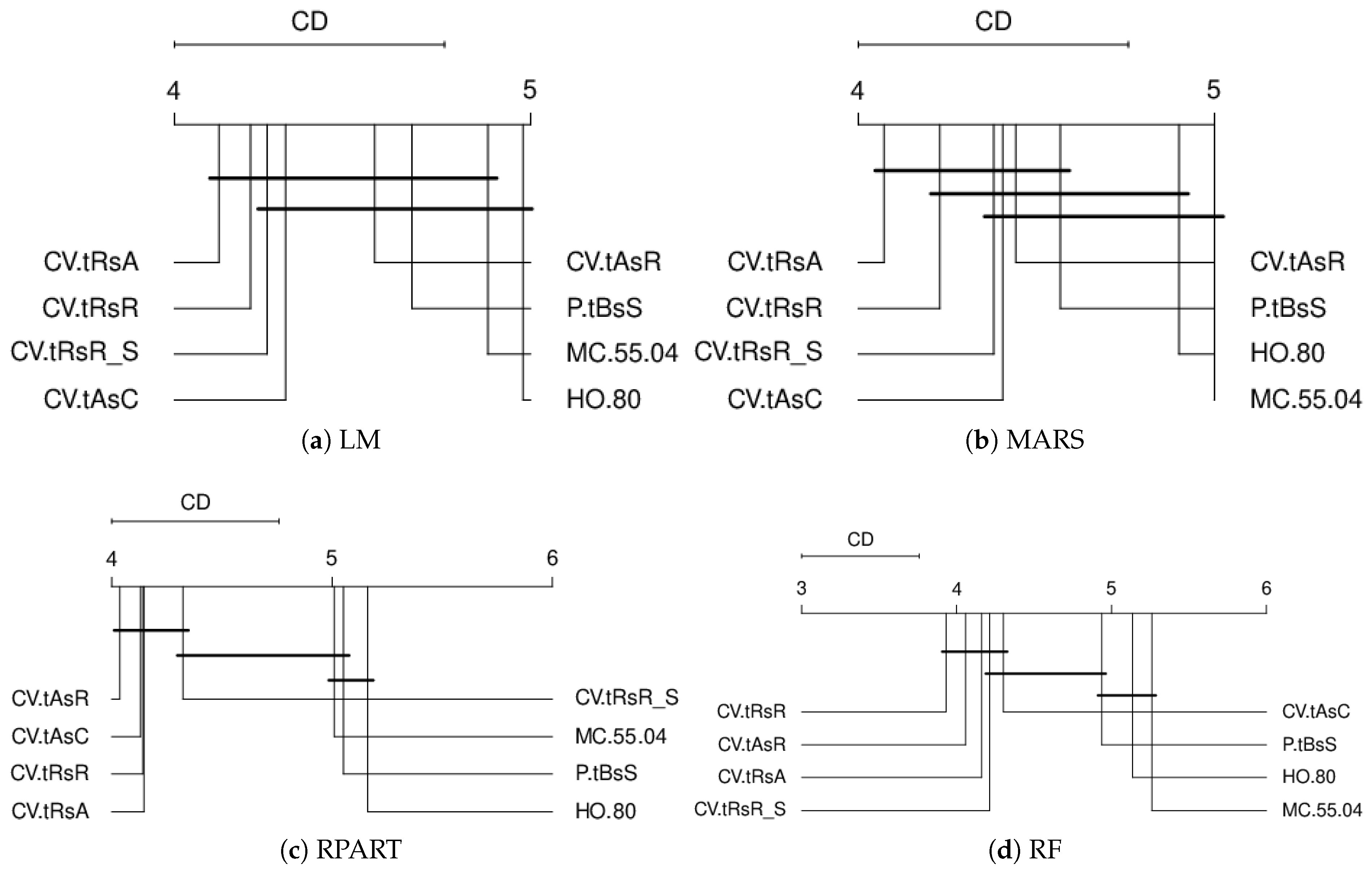
Statistical Significance
For statistical significance testing, we consider standard CV, 80/20 holdout, the top 5 CV methods with best overall average rank and the best OOS method of each type (holdout, Monte Carlo and prequential).
The Friedman–Nemenyi test is applied, with estimation procedures used as the “classifiers” or “treatments” (using
R package
scmamp [
39]). Since there is an assumption that the datasets should be independent, separate Friedman tests are carried out for the results obtained by each learning model.
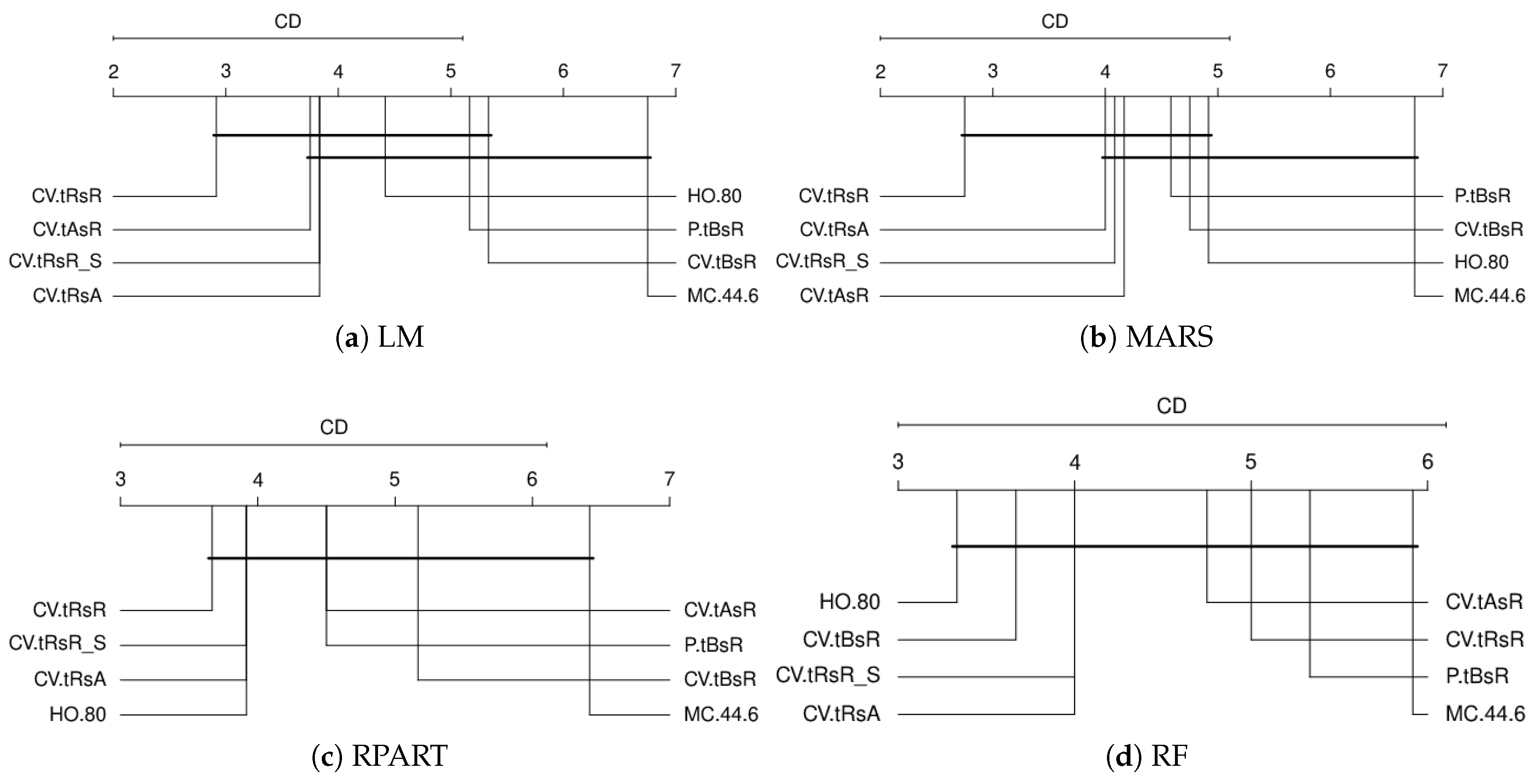
Figure 14 and
Figure 15 show critical difference diagrams for the artificial datasets and all the real-world datasets. In the case of artificial datasets, we find significant differences between methods, indicating that most CV procedures significantly outperform some or all OOS methods in terms of absolute error, at 5% confidence level. For real-world datasets, no significant difference between estimation procedures is found at a 5% confidence level for tree-based models RF and RPART. However, a significant difference is found between standard CV and the selected Monte Carlo method when using LM and MARS.
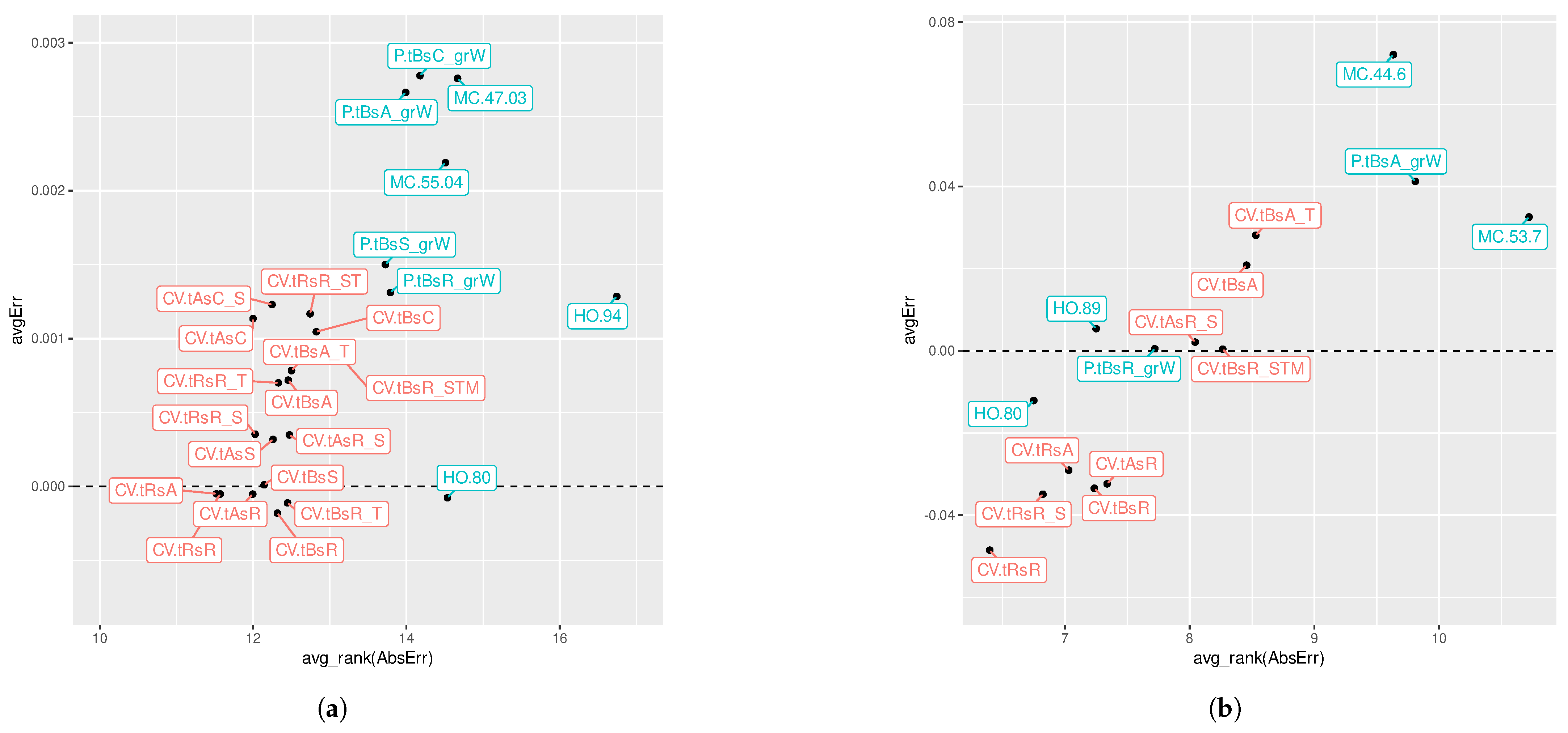
3.4. Median Errors vs. Average Rank of Absolute Errors
Having investigated the behaviour of median errors and the overall average ranks of absolute errors, we now compare them in
Figure 16. Unlike
Table 4 and
Table 5, these average ranks are calculated including all methods against each other, instead of considering CV and OOS procedures separately.
It is clear from these figures that there is a trade-off where the most accurate estimators, that is, those with lower average ranks of absolute error (appearing towards the left side of the graphs) seem to also be severely over-optimistic in some of their estimates, with average errors below the dashed line indicating error underestimation.
This grows starker in the case of real-world scenarios, where methods are more spread-out across both the x- and y-axis, with many methods being diametrically opposed in relation to the dashed line, that is, there are methods suffering similar degrees of severe error underestimation as severe error overestimation. For example, standard CV () has an average error that is a bit further below the dashed line than is above it; on average, they underestimate and overestimate errors, respectively, to a similar degree. Nevertheless, standard CV presents a better average rank in terms of absolute error. Moreover, standard CV is more optimistic, on average, than almost all other methods are pessimistic—the only exception being . In contrast, in the case of artificial data, even the most optimistic methods (such as standard CV) do not reach levels of underestimation as high as the overestimation incurred by more pessimistic methods.
Whether data are artificially generated or observed in the real-world, most prequential methods (those with blue labels) appear above the dashed line, indicating more pessimistic estimates—the only exception being 80/20 holdout which tends to be optimistic. Out-of-sample procedures are also mostly found from the middle to the rightmost side of the graphs, with higher average ranks indicating that they tend to be less accurate in their estimates than other methods when applied to the same scenario (i.e., the same dataset and learning model). In real-world cases, spatiotemporal block prequential evaluation () stands out, since it manages to provide estimates that are quite accurate (very close to the dashed line), without being optimistic (on average) and not compromising as much in terms of absolute error rank (the method sits, on average, 1.32 positions below standard CV which achieved the best overall rank).
4. Discussion
In this paper, we provide an extensive empirical study of performance estimation for forecasting problems using both artificially generated and real-world spatiotemporal datasets. Previous empirical studies have already shown that dependence between observations negatively impacts performance estimation using standard error estimation methods such as cross-validation for time series [
5,
12,
13], time-ordered Twitter data [
14], spatial and phylogenetic data [
15] and spatiotemporal interpolation [
11].
In this study, we first observe that error estimates are usually reasonably accurate, although estimations are much closer to the gold standard error in artificially generated data. Possible explanations for the lower relative errors found for artificial datasets, when compared to the real-world datasets, include the fact that: (a) some of the real datasets include missing data; (b) in the artificial datasets, locations were simulated on a regular grid, while only one of the real-world datasets had regularly distributed sensor stations; and (c) the underlying data generation process of artificial datasets was stationary and homogeneous, while real-world datasets may include drift of concept and/or contain heterogeneities.
Standard CV does raise problems when applied in the spatiotemporal context: while it often achieved the best average rank in terms of absolute error, it tends towards underestimation of errors and exhibits a considerable number of outliers of severe error underestimation. The issues with standard CV can be mitigated by taking into account the spatial and temporal dimensions in the fold allocation process and/or through the introduction of buffers. Indeed, for artificial datasets, contiguous-block spatial CV (CVtAsC) is one of the best in terms of approximating the “gold standard” error while also avoiding being overly optimistic in its estimates. For real-world datasets, adding a spatial buffer to spatially blocked CV (CVtAsR_S) not only approximates the error better than many other methods, but, on average, it also avoids being overly optimistic about errors. Temporal block CV (CVtBsA) also mostly avoids severe error underestimation, but that comes at a higher cost in terms of absolute error.
Holdout, similar to standard CV, presents much larger proportions of optimistic error estimations than other OOS procedures. In contrast, other out-of-sample procedures manage to much more often avoid being overly optimistic about errors; however, most of these methods did not, in general, do as well in terms of absolute difference to the “gold standard”, being less accurate in their estimates. The fact that OOS methods are less prone to underestimation of error might still be seen as an advantage over holdout and most other types of cross-validation. If so, these results could point to the temporal dimension being more important to respect when evaluating spatiotemporal forecasting methods. That considering the temporal dimension provides advantages in performance estimation is in line with previous research on time-ordered data [
5,
14].
There is a trade-off between the ability of methods to obtain better average ranks of absolute difference to the “gold standard” error and the avoidance of severe underestimations of error—depending on the application, one of these criteria may be considered more important than the other.
The evaluation procedures estimate performance by: (1) allocating observations to training and test sets; (2) constructing a number of models; and (3) computing statistics. Step (1) may require computing spatial and/or temporal distances, which might be quadratic on the number of observations. However, most resources will usually be spent learning on Step (2). The simplest approach, holdout, uses two partitions to construct one single model. The cross-validation approach will take an user-defined k partitions and construct k models on fractions of the training data. Temporal-block prequential models also use k partitions but construct models using an average of partitions if using a growing window or a fixed number of at least one partition if using a sliding approach. The Monte Carlo model can be seen as running k holdouts, although learning from a smaller fraction of the total number of examples. Assuming that learning time tends to grow with dataset size, we would expect cross-validation to be the most expensive estimation procedure, followed by prequential evaluation with growing window. In practice, we often use parallelism to diminish execution time at the cost of spending more processing and memory resources.
Decisions around training and test set size also raise some questions about what is fair when comparing methods that utilise data in such a different way. Is it more important to maintain train or test set size consistent across methods? Should we focus instead on keeping the ratio between training and testing set size equal across procedures or the total number of test sets regardless of how data are divided? When comparing, for example, temporal-block CV with spatiotemporal-block CV, is it more fair if each of them uses the same number of temporal blocks (meaning that spatiotemporal block CV would have a higher number of folds overall) or would it be better if both methods use the same number of folds in total? The answers to these questions are not straightforward. We divided the datasets for cross-validation and prequential evaluation procedures into the same number of folds, which means that cross-validation methods had access to, at least, one more test set than their prequential counterparts; when translating this to OOS procedures, we decided to try to keep the ratio between test set and training set stable, which meant that Monte Carlo methods had access to smaller portions of the dataset in both training and testing phases. This is only one way of approaching this problem, but other options could also be valid. In fact, this experimental design can put Monte Carlo procedures at a disadvantage due to using smaller fractions of the in-set for error estimation—one possible explanation for the under-performance of Monte Carlo estimation methods, which have previously shown to fare well in time-series contexts [
13]. Further exploration of the effects of in-set/out-set ratio, as well as training and test set sizes and number of partitions or Monte Carlo repetitions, may provide some insights into these questions. Buffer sizes were also fixed at only one value, that could be less than ideal. Further research could provide more insight into the effects of buffer size.
There are some other limitations to this work. For example, there is some bias in the experimental design which may affect the conclusions (e.g., it is reasonable to assume that holdout benefits, at least in terms of absolute error, from being the method used to set the “gold standard” error). The artificial datasets do not include non-stationarities or missing data, and the number of real-world datasets used is perhaps not large enough to make generalisations that would hold for all real-world spatiotemporal datasets, regardless of their characteristics. In addition, the spatiotemporal indicators that were used as predictors may also have an impact on the results.
Moreover, it should be noted that the results presented here for cross-validation and out-of-sample strategies differ in some respects from those reported in the conference version of this paper, which could be caused by several factors: (a) some differences and improvements in dataset generation and pre-processing; (b) an additional number of artificial datasets generated; (c) the inclusion of two additional learning models in the study; and (d) changes to the underlying random number generator in more recent versions of the R language used to implement our experiments. Even within this study, there are differences in the top performers, depending on the learning model used, as well as the types of dataset (real or artificial). Furthermore, when using the same datasets and model, some of the differences between procedures are not statistically significant.
Given all of this, it is difficult to make a definitive recommendation about which specific evaluation procedure should be the gold standard in spatiotemporal forecasting. However, our results add validity to the notion that the spatial and, especially, the temporal dimension should not be ignored when estimating performance in spatiotemporal forecasting problems, and some of the issues mentioned above could be addressed in future work.
Other directions of interest for future work would be: (a) setting the “gold standard” as forecasting future observations in new locations (instead of time-wise holdout); (b) controlling for the effect of including outer locations and/or introducing missing data in artificial data; and (c) designing solutions for contiguous assignment of spatial blocks, possibly using quadtrees, in the case of real-world (or artificial) datasets with irregular grids.
5. Conclusions
The problem of how to properly evaluate spatiotemporal forecasting methods is still an open one. Temporal, spatial and spatiotemporal dependence between observations negatively impacts performance estimation by standard error estimation methods such as cross-validation.
This work provides an extensive empirical study of performance estimation for forecasting problems using four different learning models and both artificially generated and real-world spatiotemporal datasets.
Our results show that, while standard cross-validation is, on average, a good estimator in terms of absolute error in relation to a “gold standard” error, it has issues with severe underestimation of errors in the spatiotemporal setting.
We recommend that methods that take into account the spatial and/or temporal dimensions of the problem be preferred over standard CV or holdout, which also seems to suffer from overly optimistic estimates. For example, space-buffered spatial block cross-validation approximates the error well and still makes use of all the available dataset, while more successfully avoiding being overly optimistic about errors. Out-of-sample procedures such as spatiotemporal block prequential evaluation also provide adequate estimates and have the advantage of avoiding situations where data are trained on future and tested on past data.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















