
Direct Collocation with Reproducing Kernel Approximation for Two-Phase Coupling System in a Porous Enclosure



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Mathematical Formulation
2.1. Governing Equations
2.2. Boundary Conditions
3. RKCM for a Nonlinear Coupling System
3.1. Reproducing Kernel Approximation for Two-Phase Variables
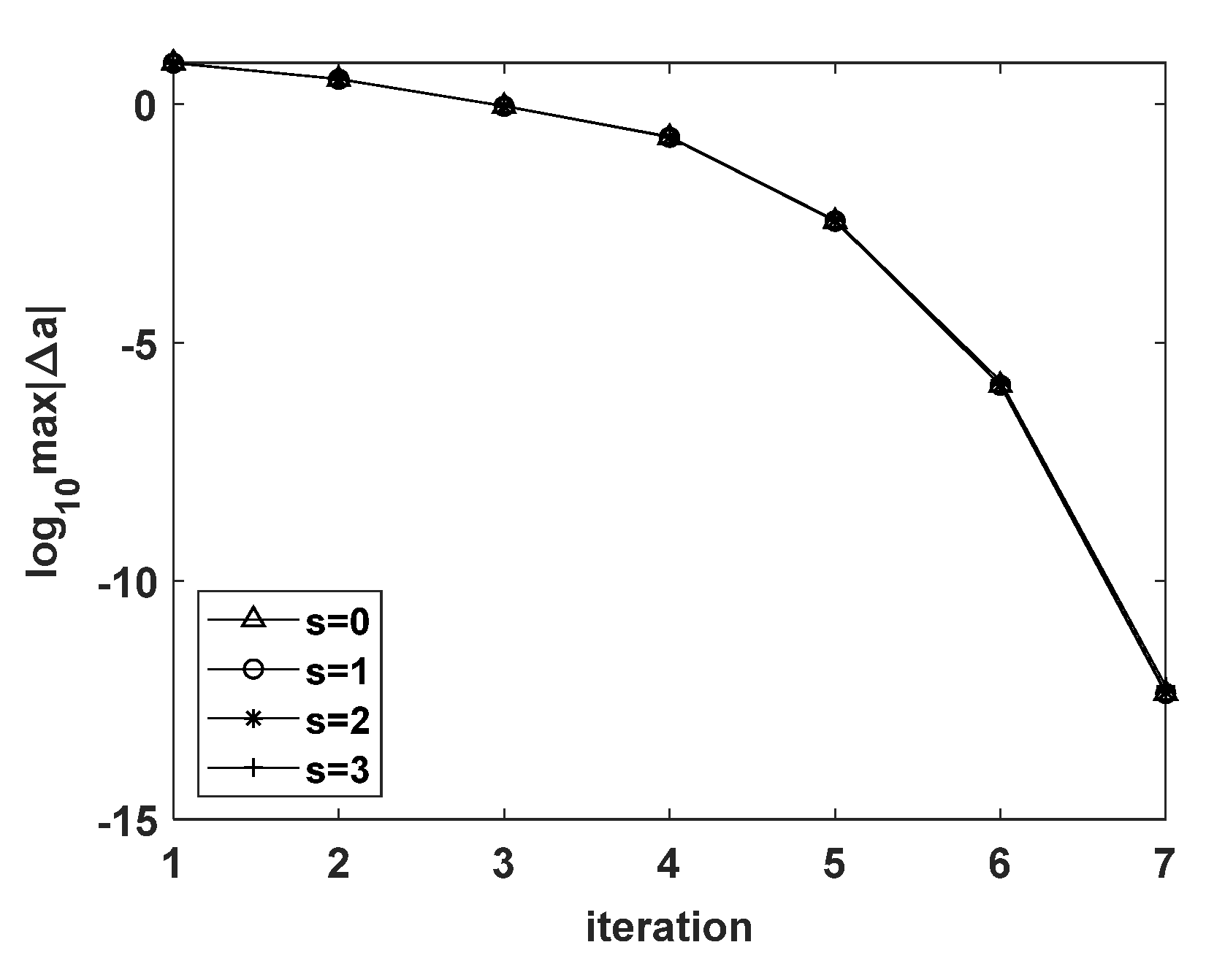
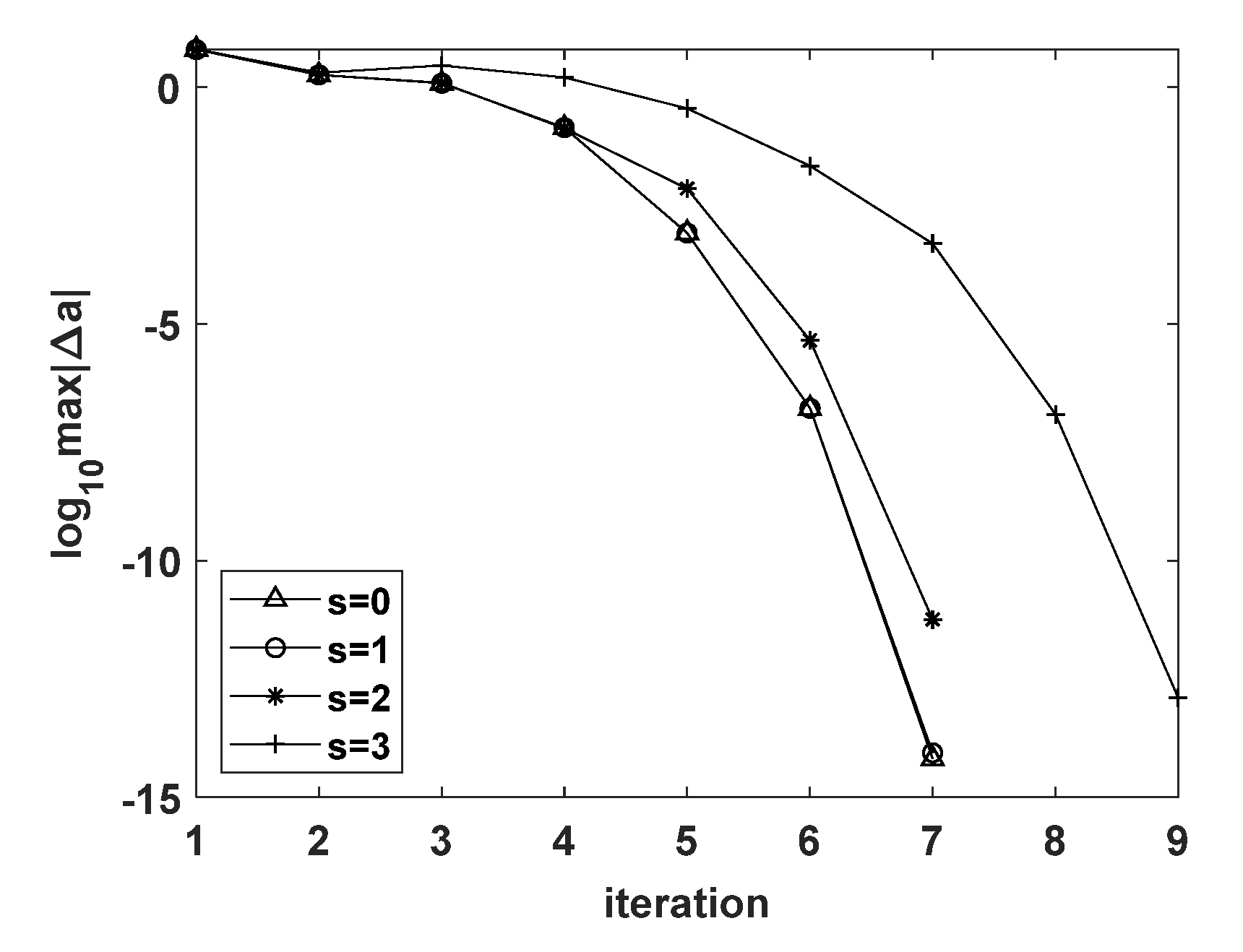
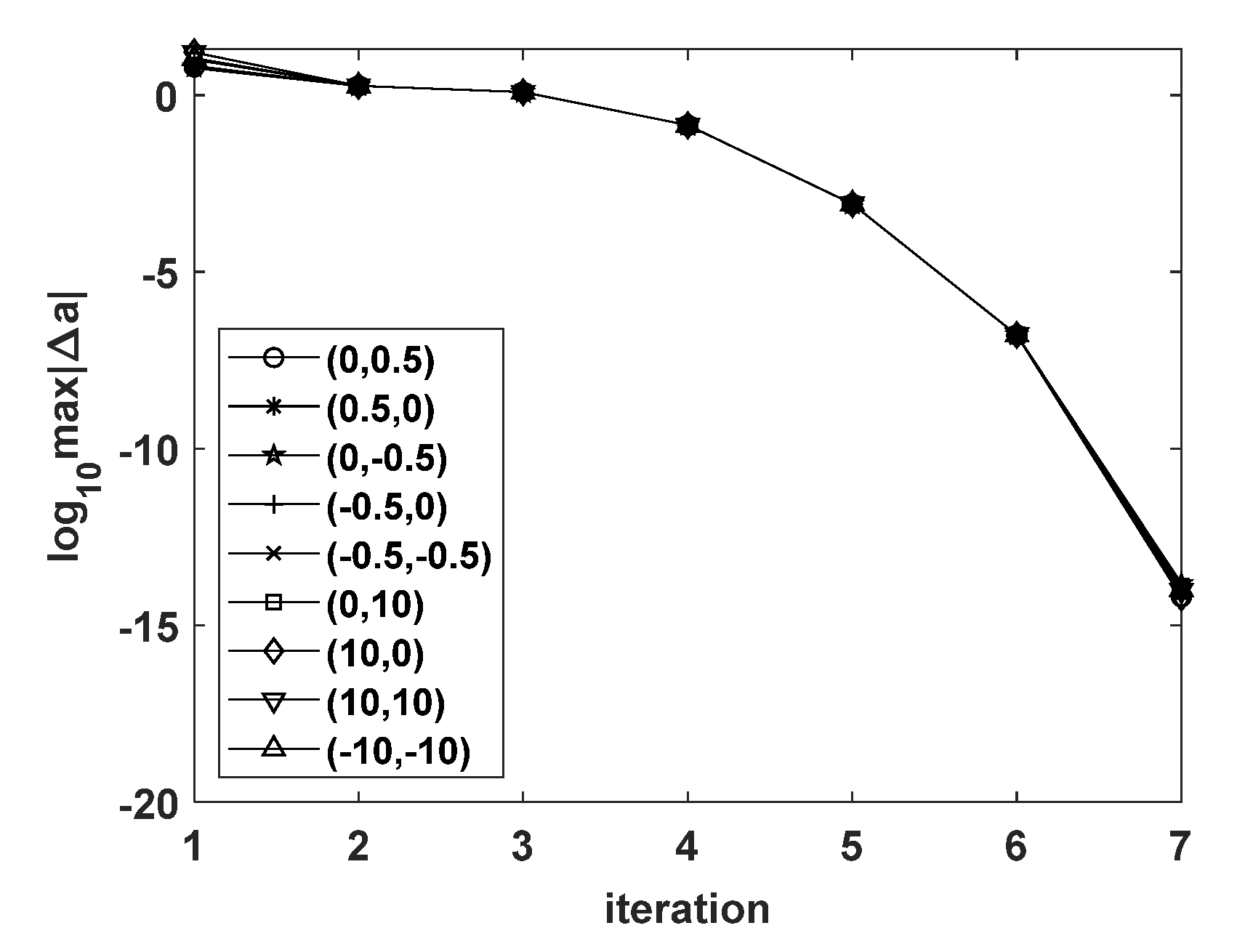
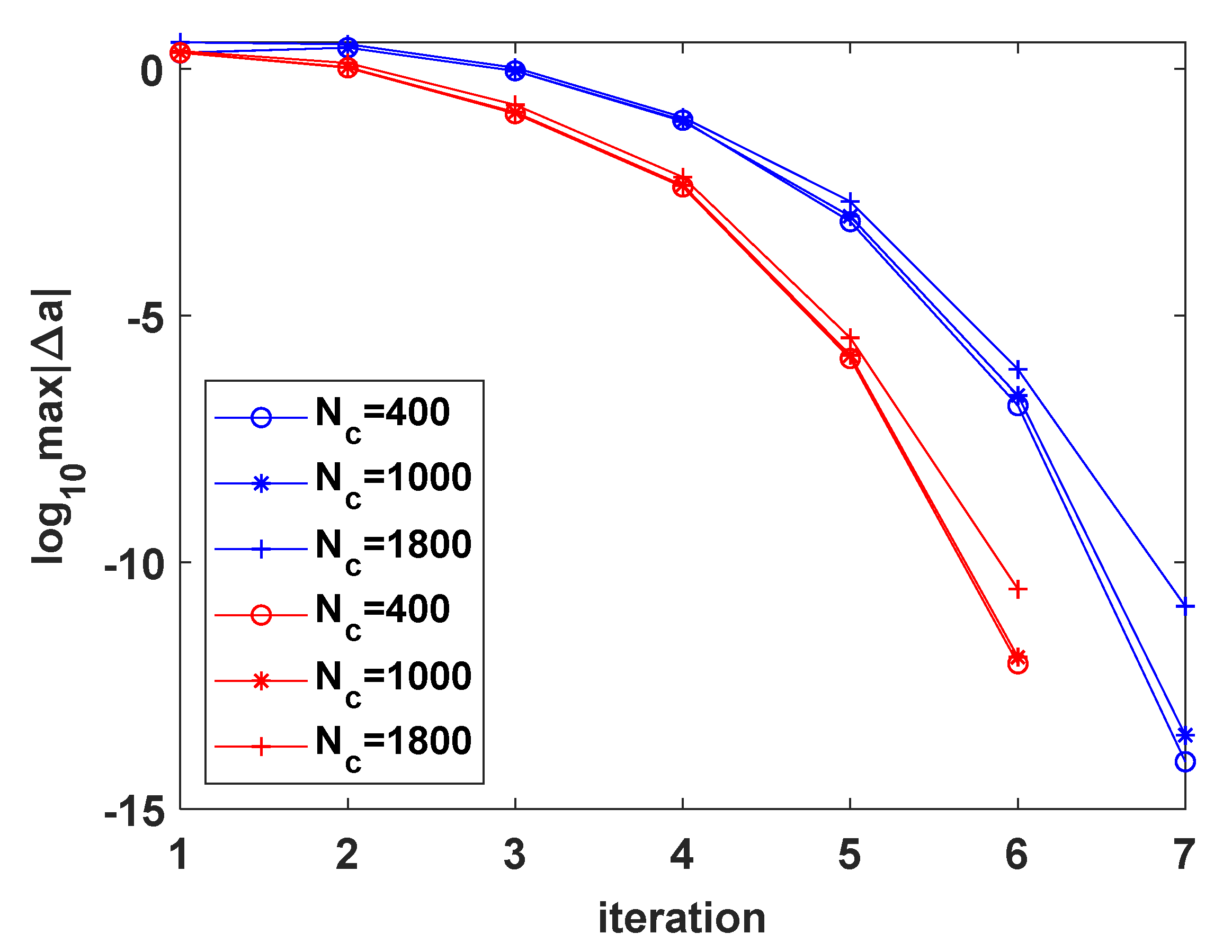
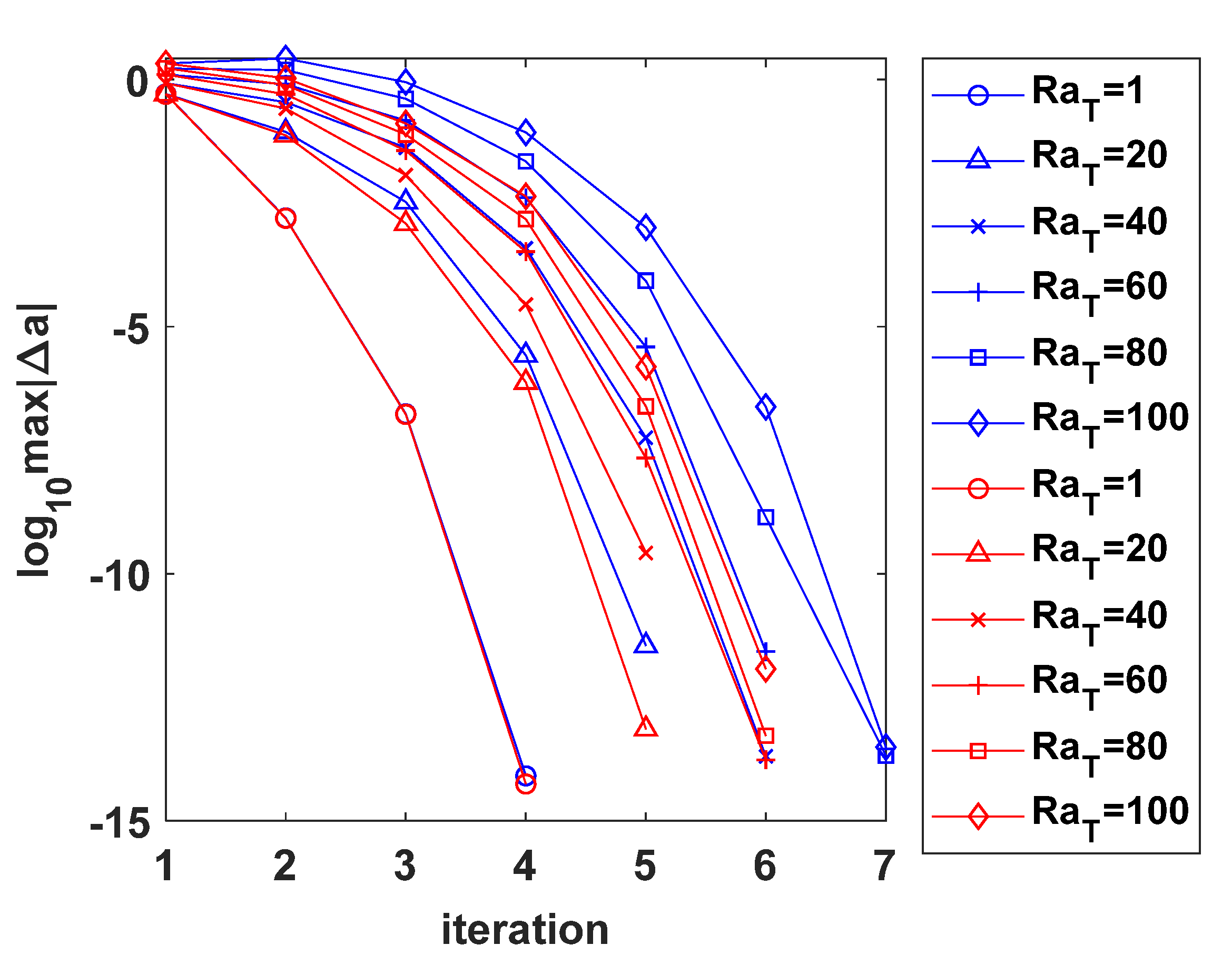
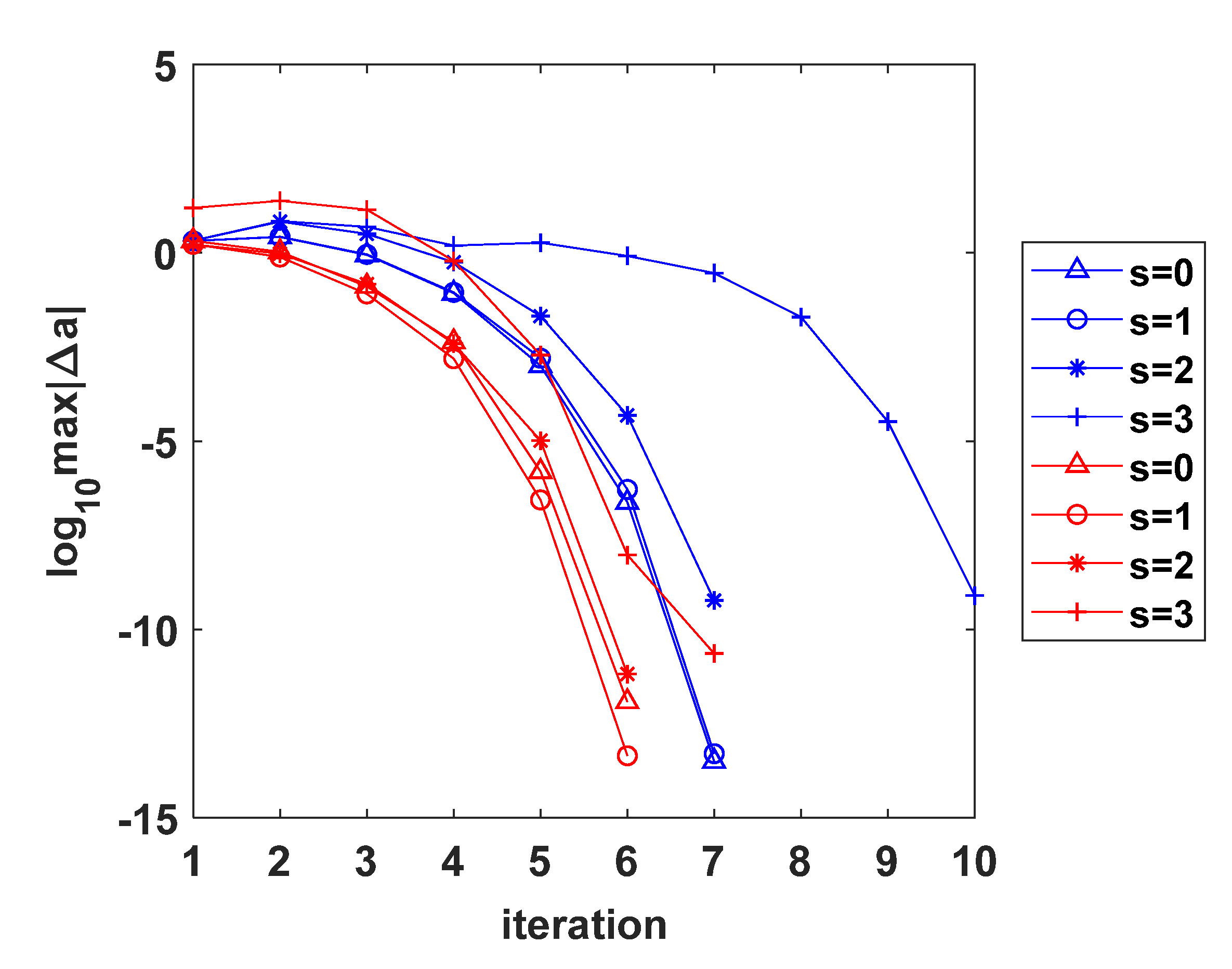
3.2. Newton–Raphson Collocation Method for Nonlinear System
3.3. Remarks
4. Numerical Examples
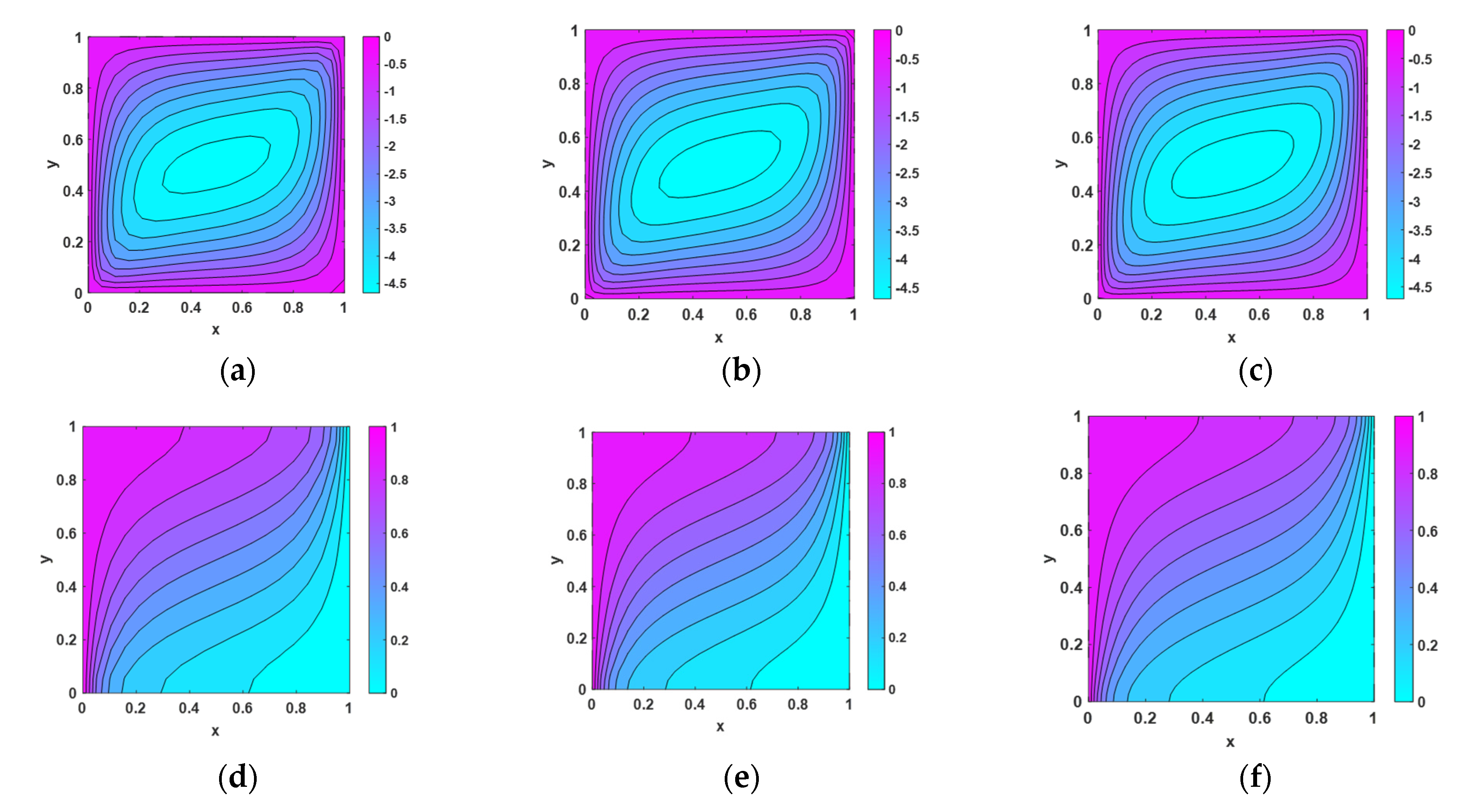
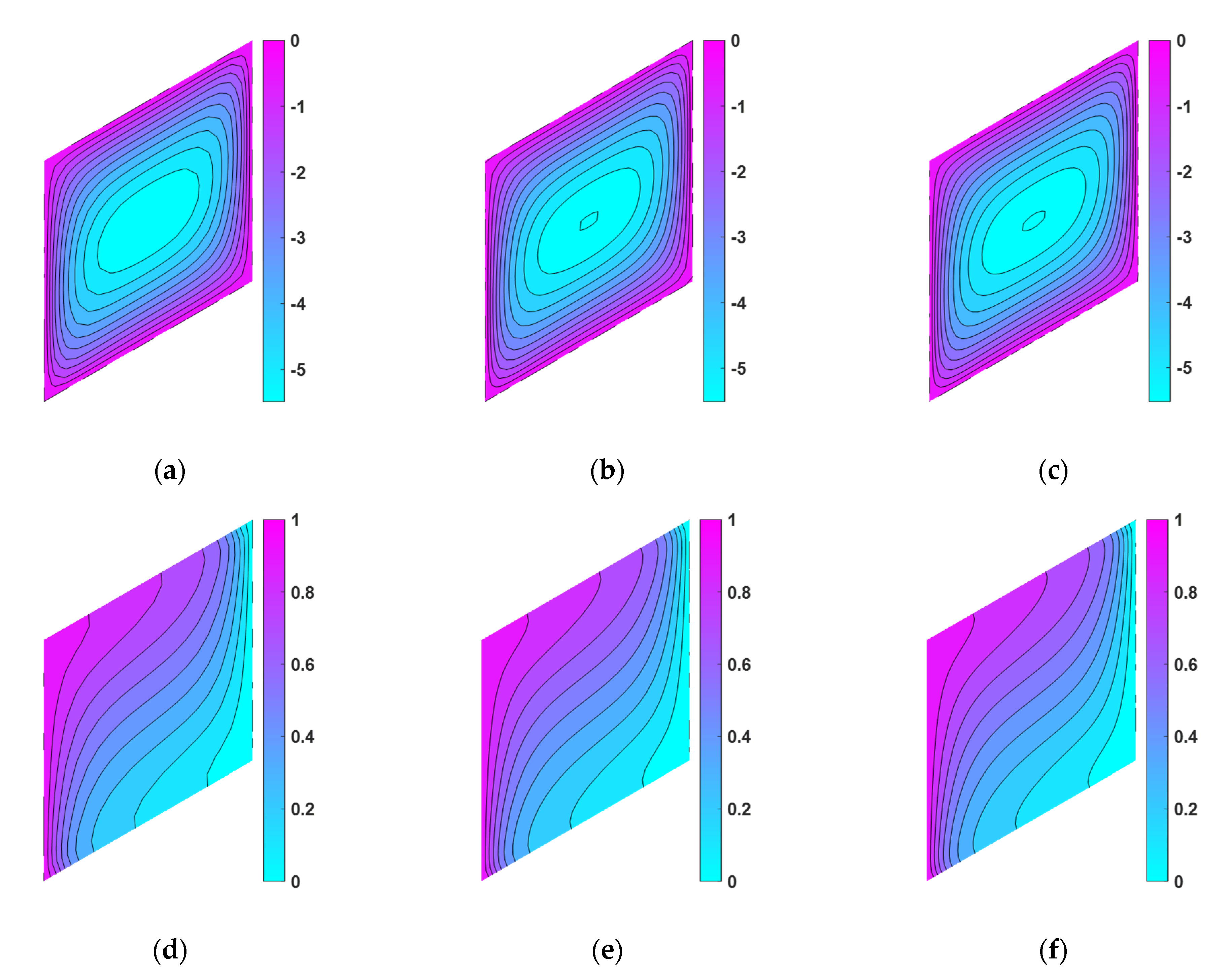
4.1. Square Domain
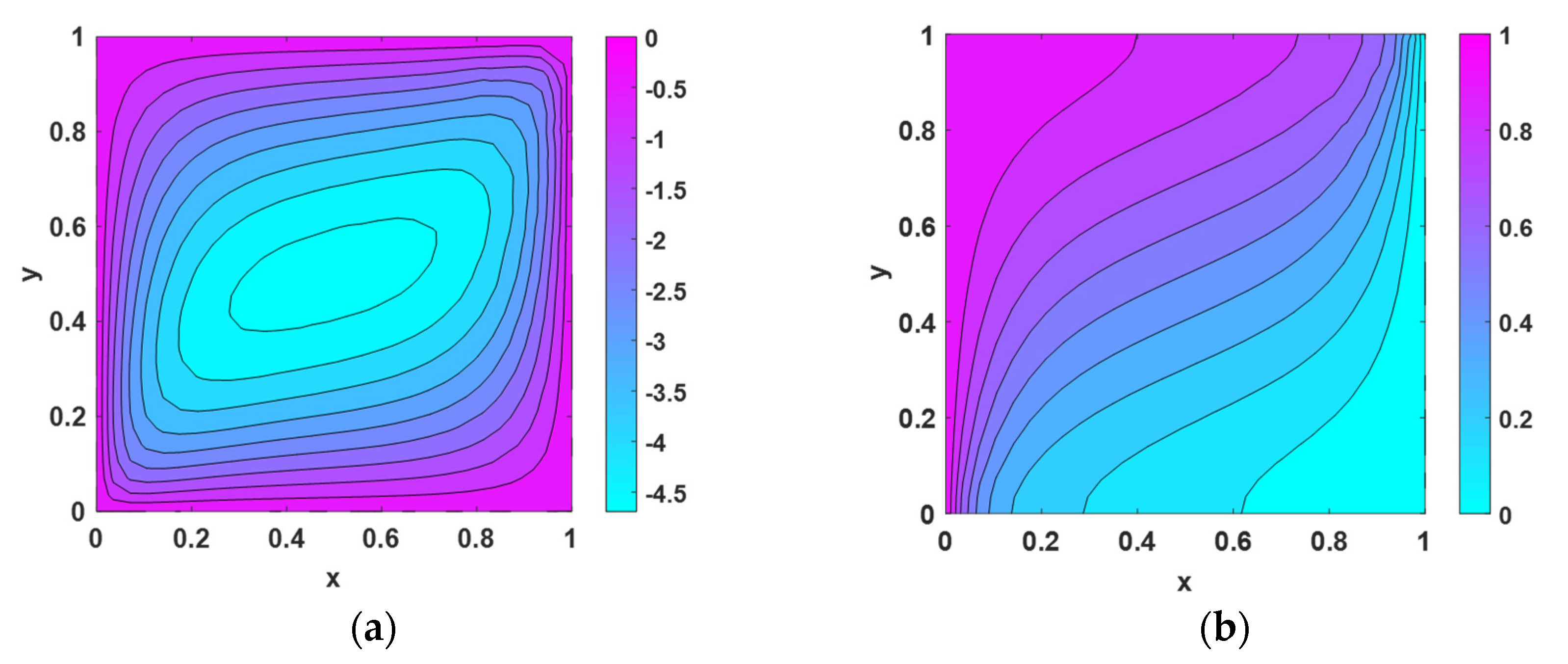
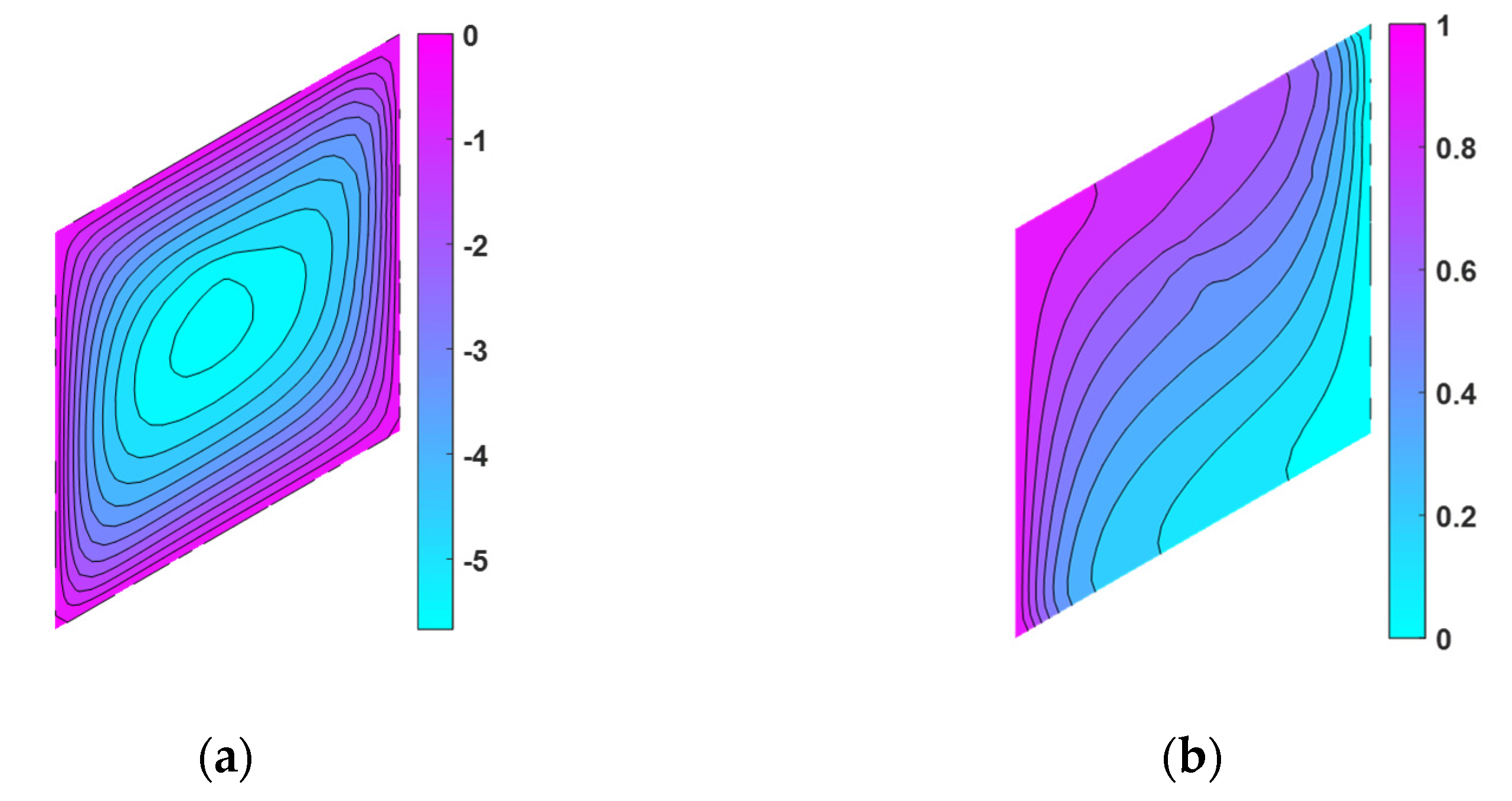
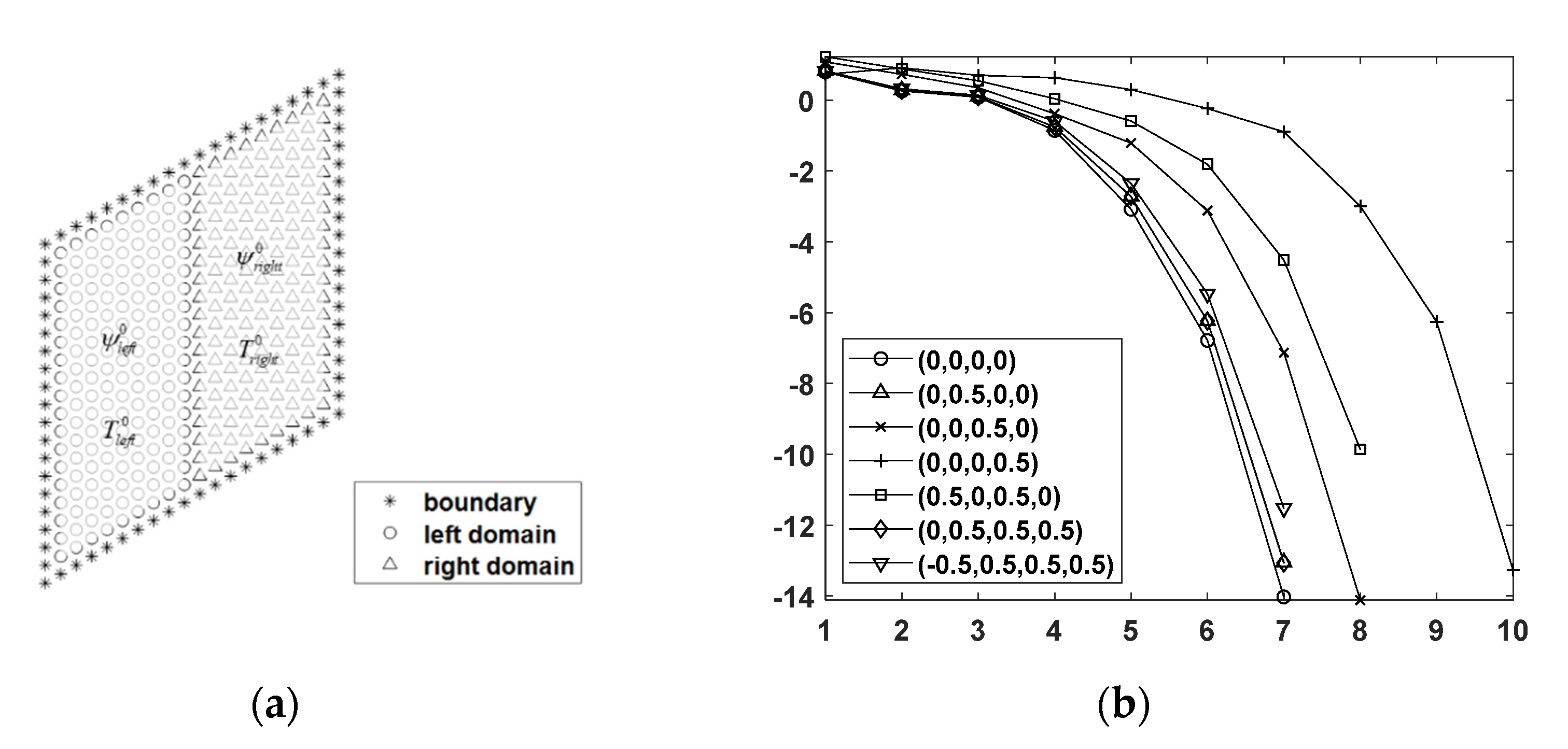
4.2. Diamond Domain
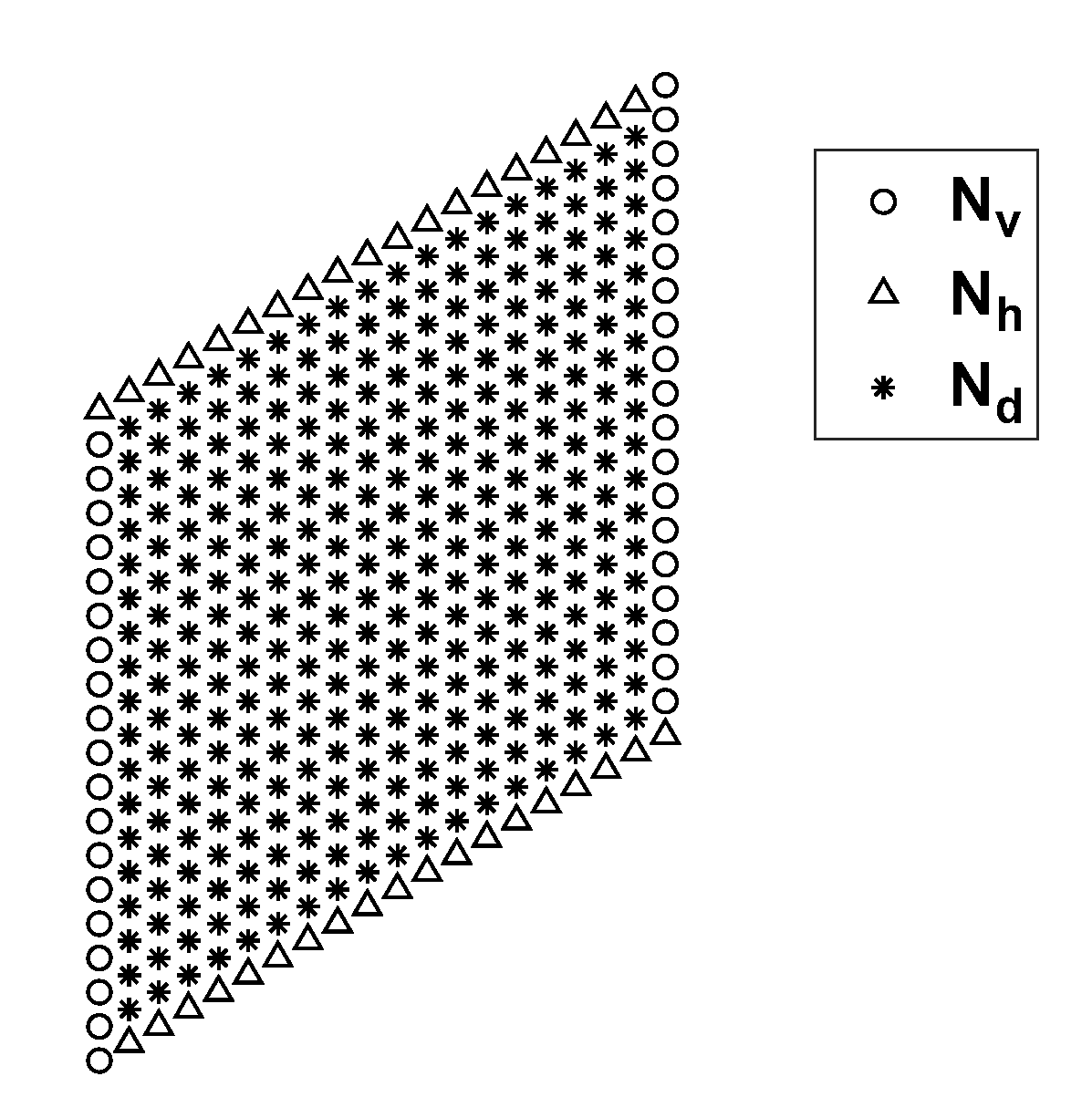
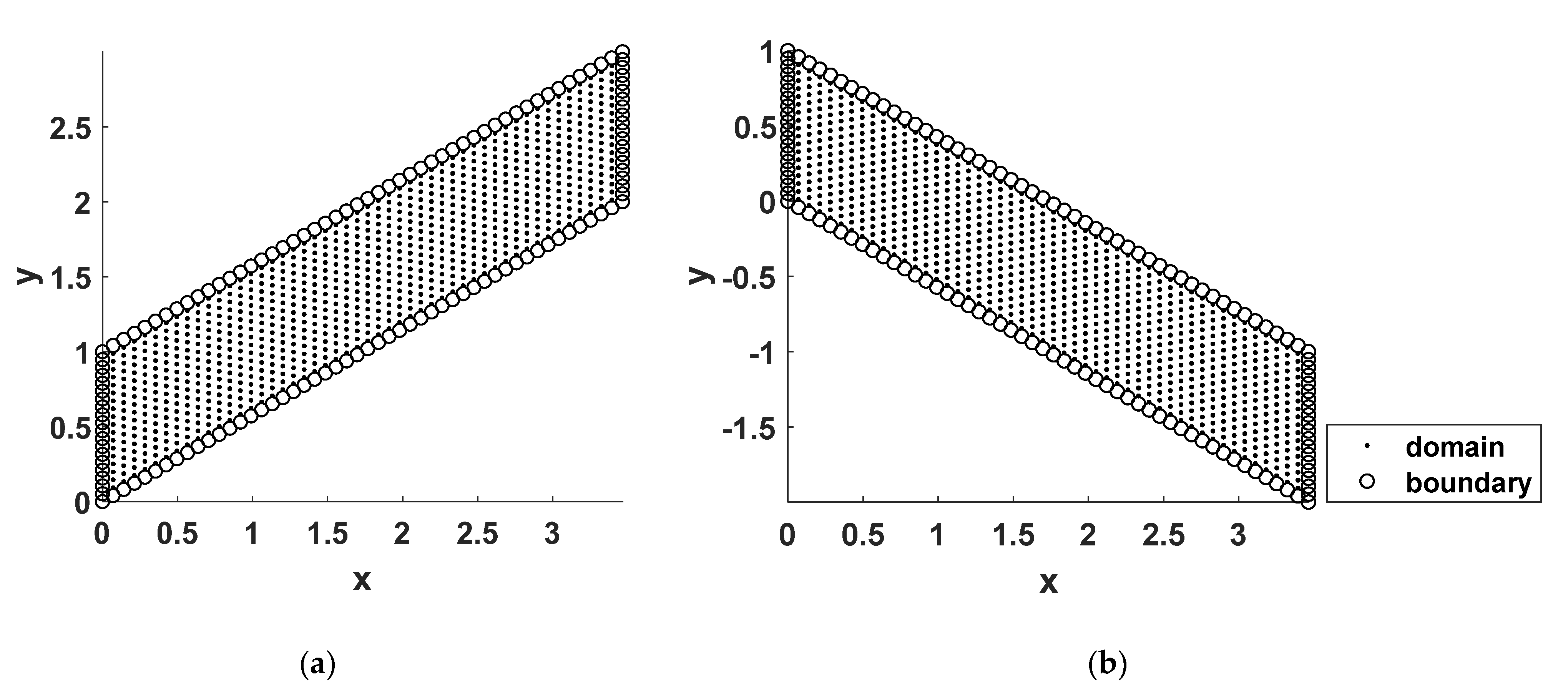
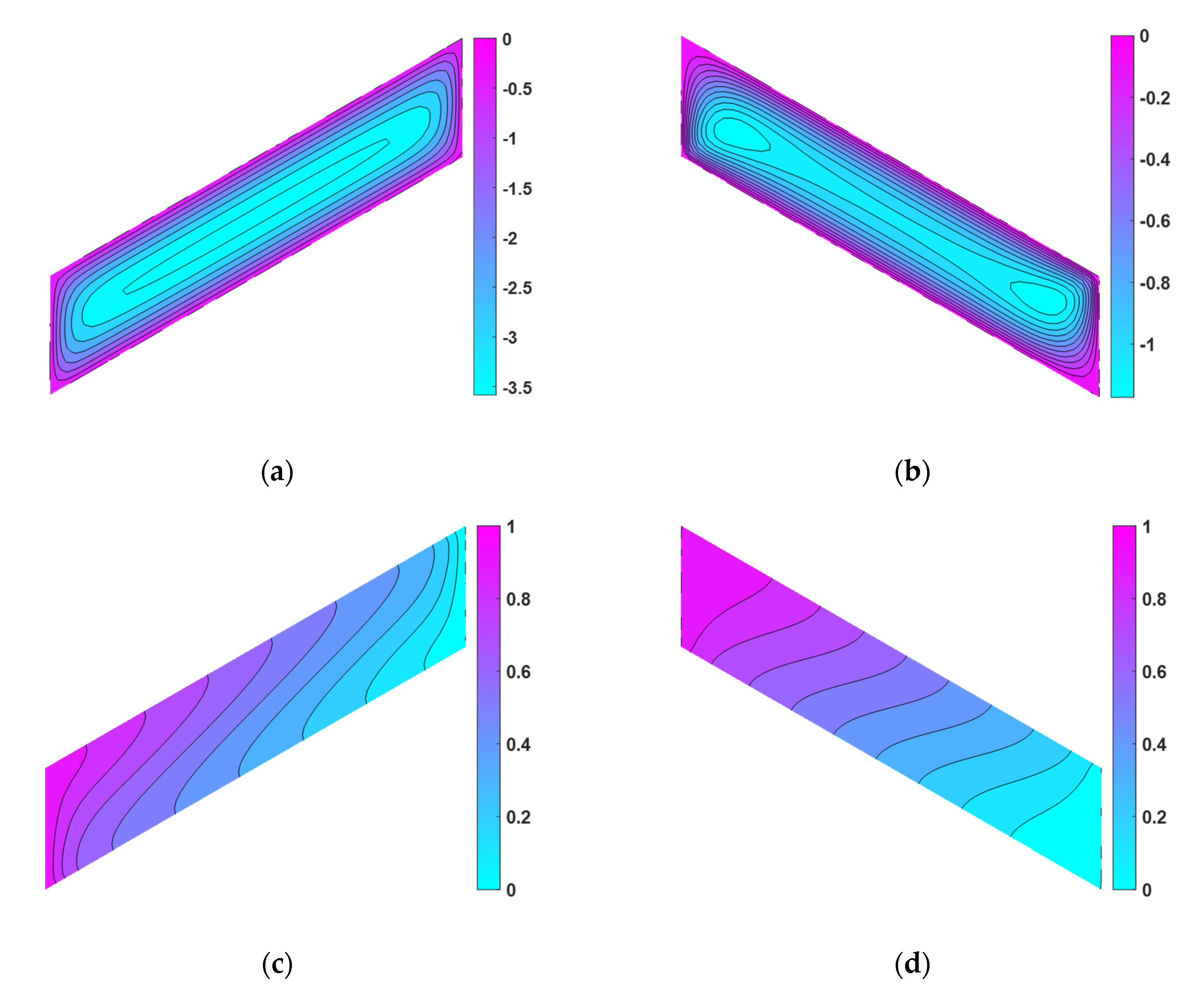
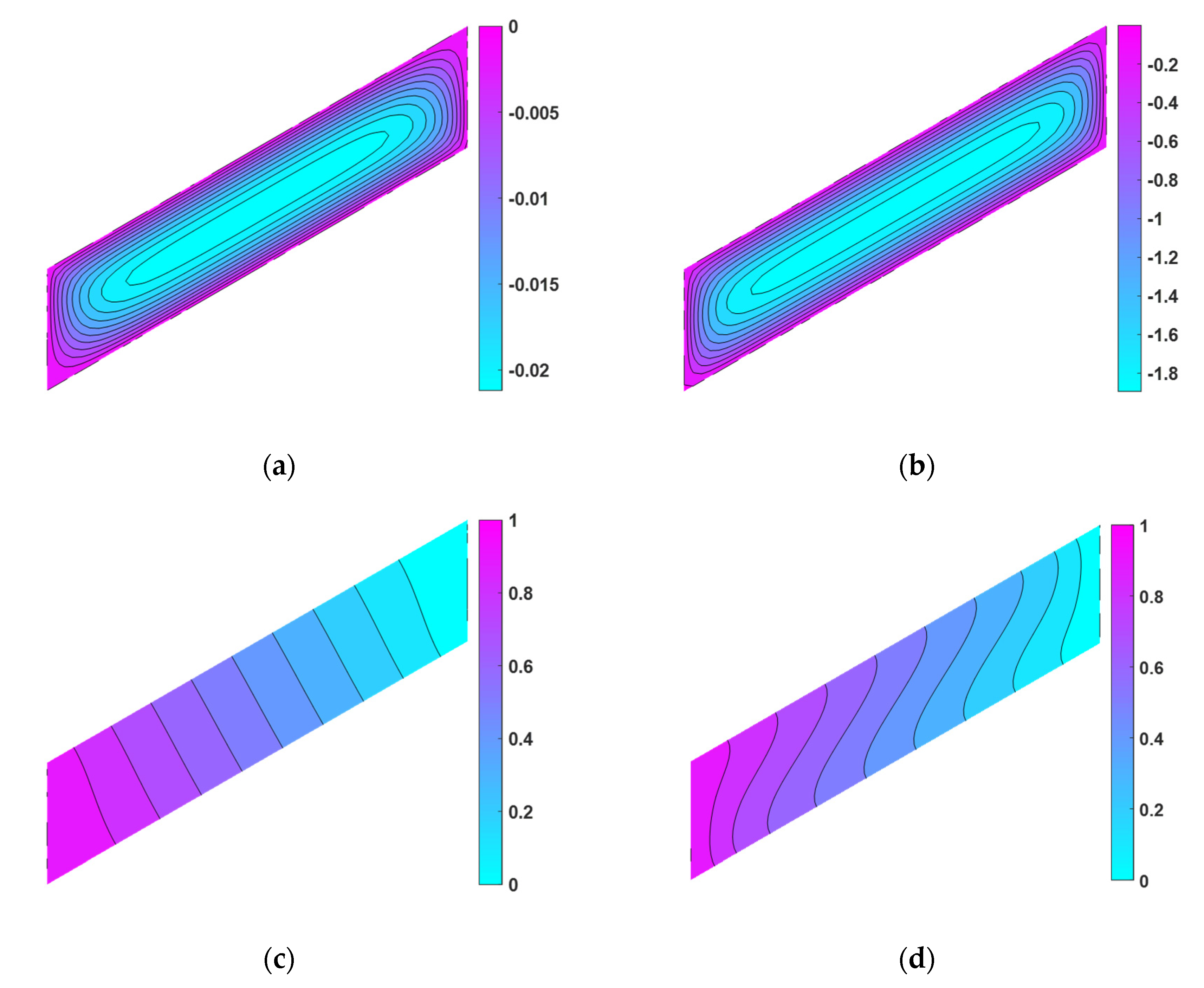
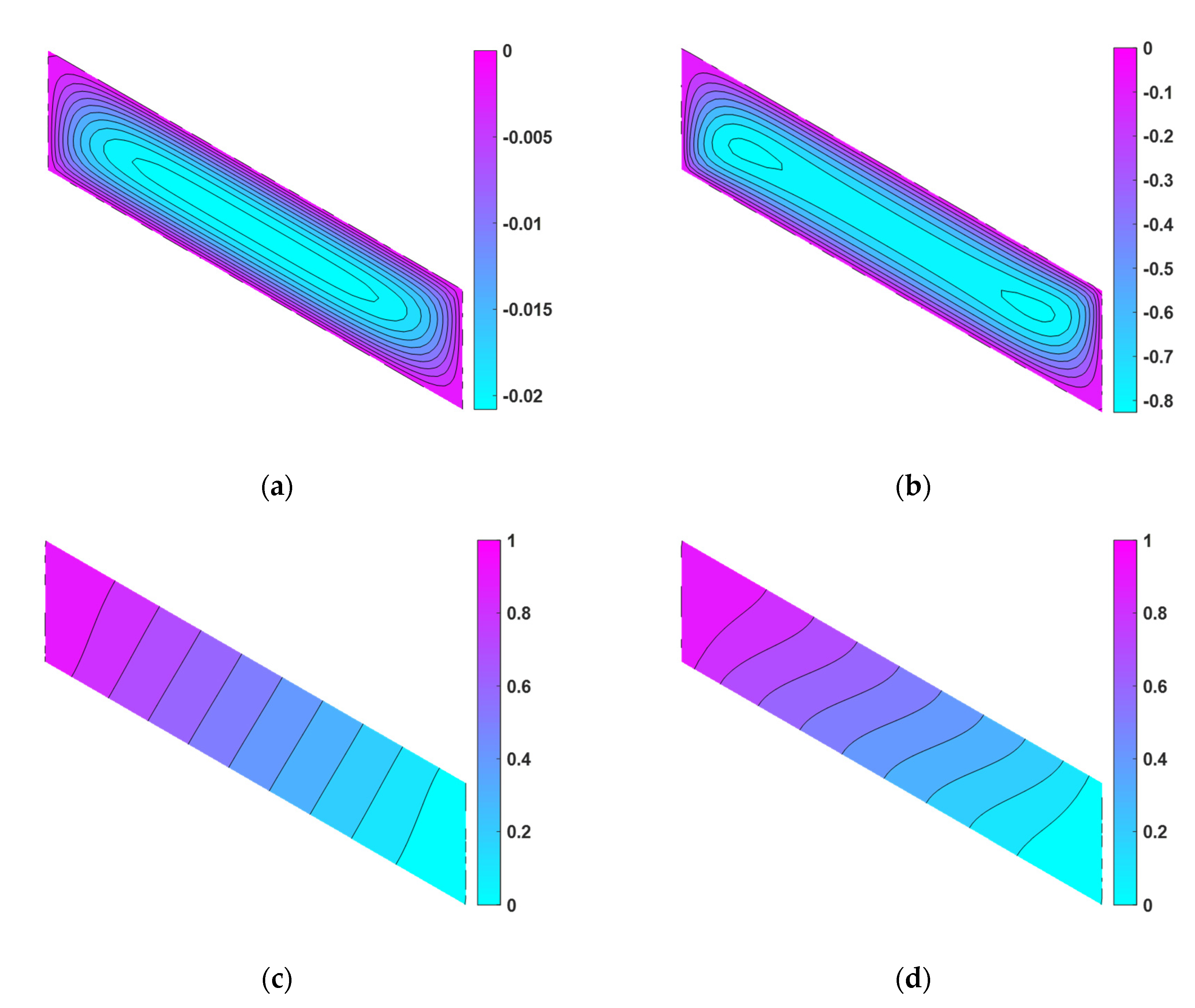
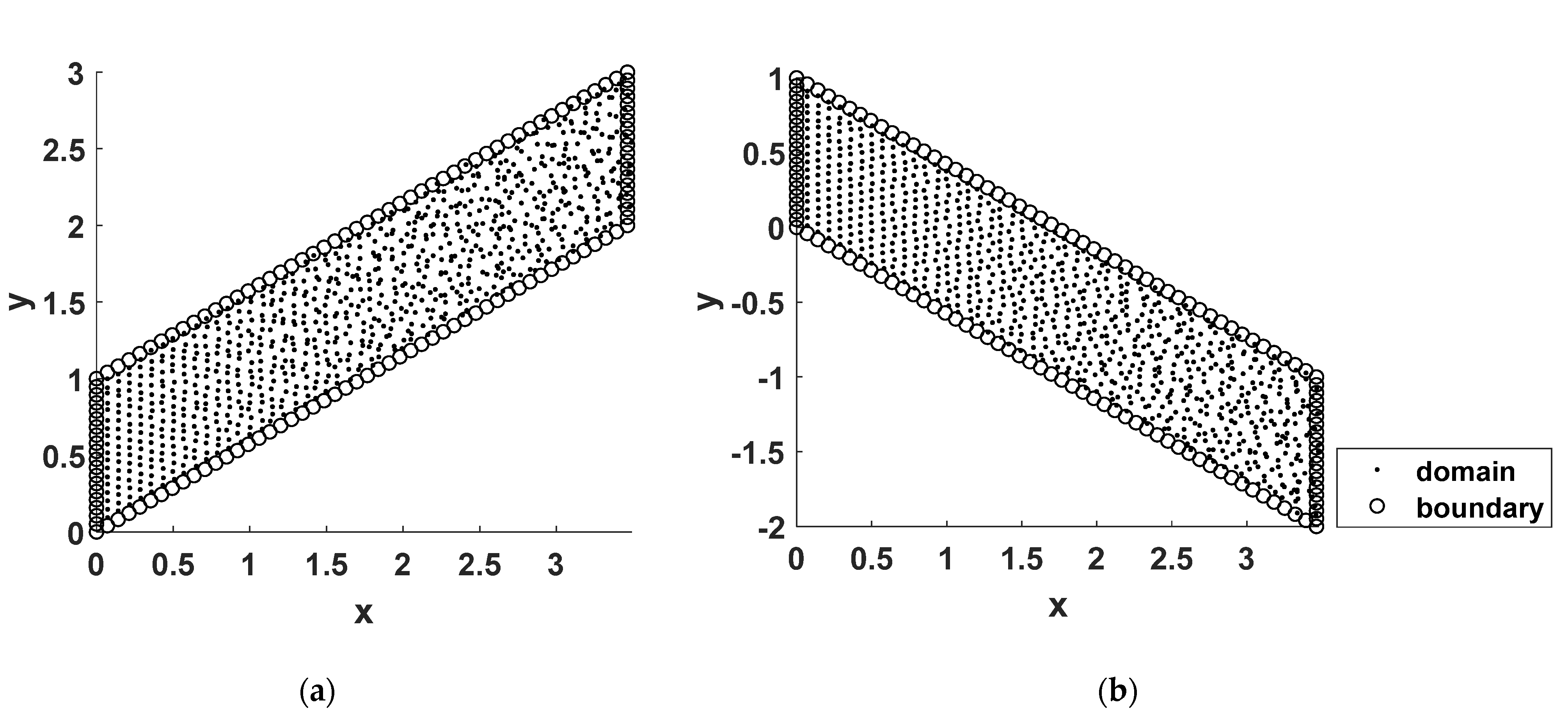
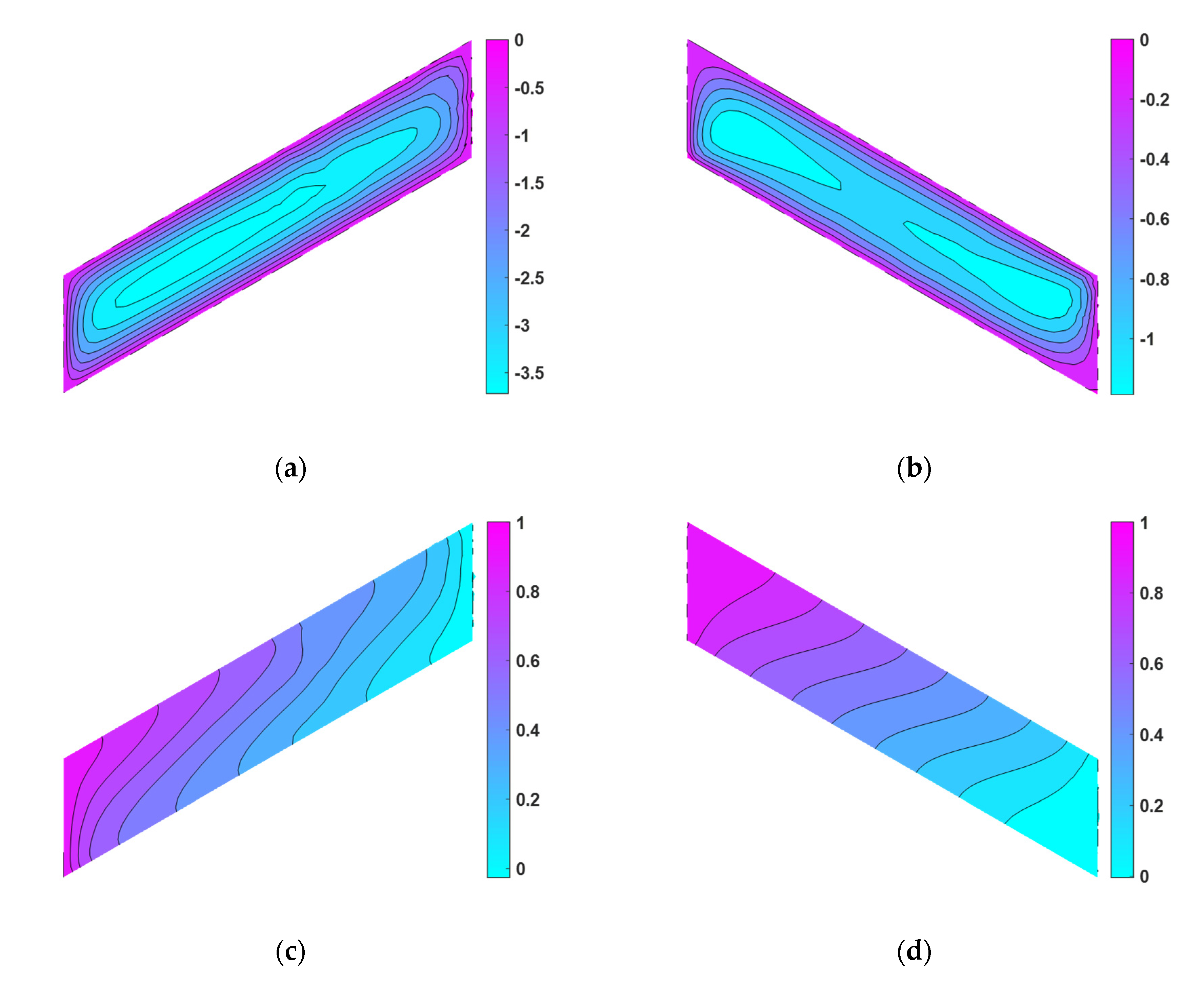
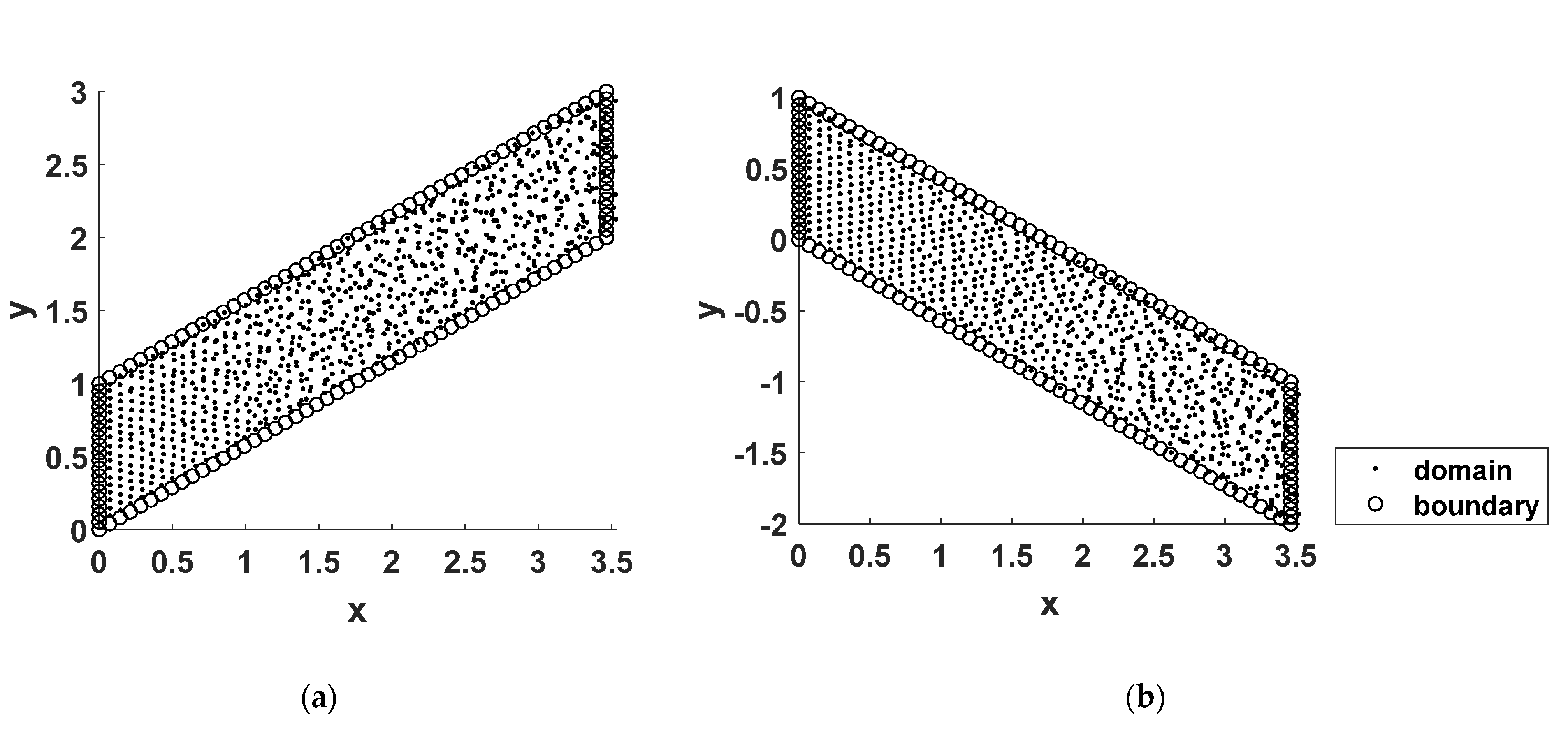
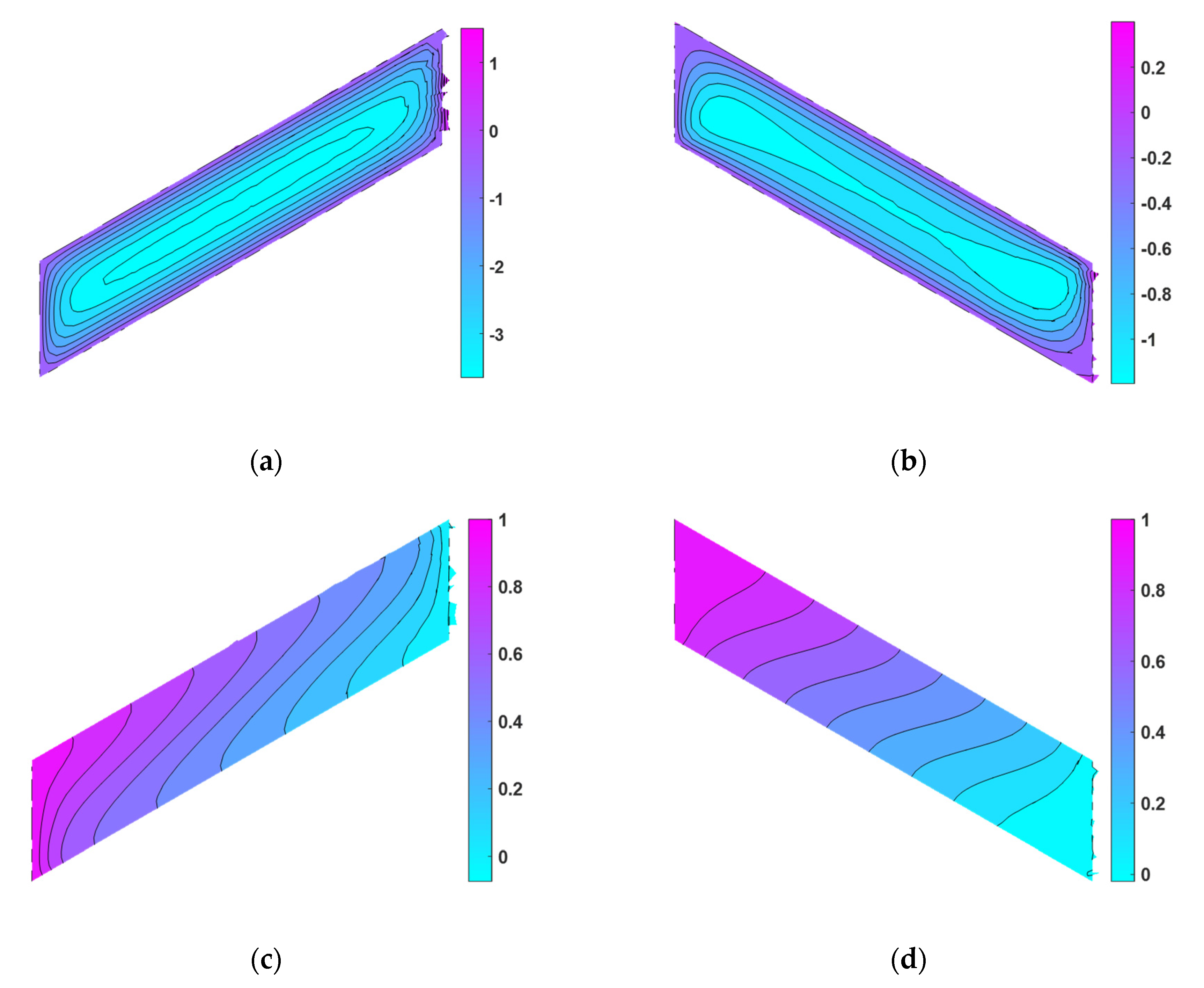
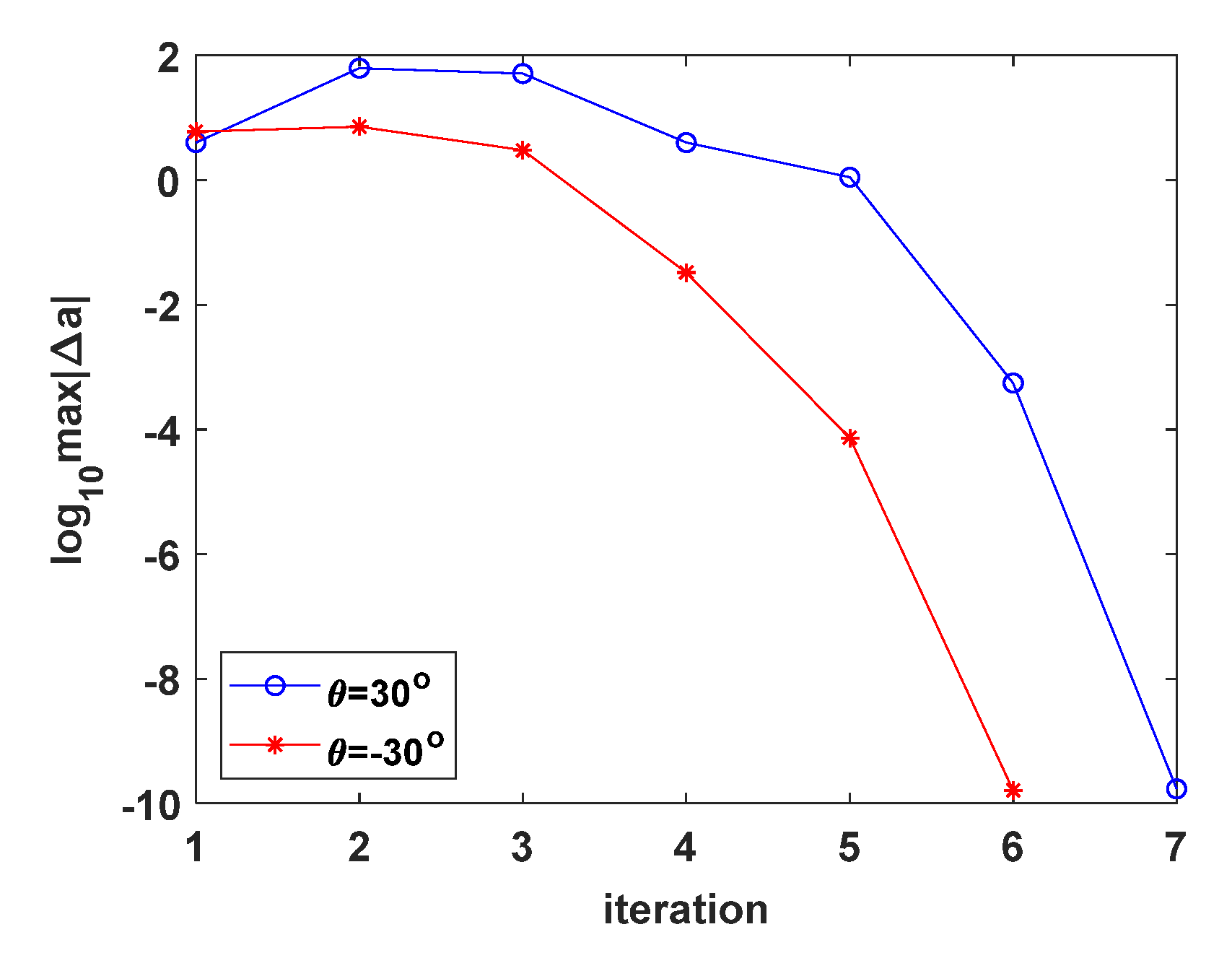
4.3. Parallelogram Domains I and II
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Nithiarasu, P.; Seetharamu, K.N.; Sundararajan, T. Double-diffusive natural convection in an enclosure filled with fluid-saturated porous medium: A generalized non-Darcy approach. Numer. Heat Transf. A 1996, 30, 413–426. [Google Scholar] [CrossRef]
- Costa, V.A.F. Double-diffusive natural convection in parallelogrammic enclosures filled with fluid-saturated porous media. Int. J. Heat Mass Transf. 2004, 47, 2699–2714. [Google Scholar] [CrossRef]
- Chamkha, A.J. Double-diffusive convection in a porous enclosure with cooperating temperature and concentration gradients and heat generation or absorption effects. Numer. Heat Transf. A 2002, 41, 65–87. [Google Scholar] [CrossRef] [Green Version]
- Kramer, J.; Jecl, R.; Škerget, L. Boundary domain integral method for the study of double diffusive natural convection in porous media. Eng. Anal. Bound. Elem. 2007, 31, 897–905. [Google Scholar] [CrossRef]
- Stajnko, J.K.; Ravnik, J.; Jecl, R. Numerical simulation of three-dimensional double-diffusive natural convection in porous media by boundary element method. Eng. Anal. Bound. Elem. 2017, 76, 69–79. [Google Scholar] [CrossRef]
- Fan, C.M.; Chien, C.S.; Chan, H.F.; Chiu, C.L. The local RBF collocation method for solving the double-diffusive natural convection in fluid-saturated porous media. Int. J. Heat Mass Transf. 2013, 57, 500–503. [Google Scholar] [CrossRef]
- Li, P.W.; Chen, W.; Fu, Z.J.; Fan, C.M. Generalized finite difference method for solving the double-diffusive naturalconvection in fluid-saturated porous media. Eng. Anal. Bound. Elem. 2018, 95, 175–186. [Google Scholar] [CrossRef]
- Yang, J.P.; Su, W.T. Investigation of radial basis collocation method for incremental-iterative analysis. Int. J. Appl. Mech. 2016, 8, 1650007. [Google Scholar] [CrossRef]
- Yang, J.P.; Su, W.T. Strong-form framework for solving boundary value problems with geometric nonlinearity. Appl. Math. Mech. Engl. 2016, 37, 1707–1720. [Google Scholar] [CrossRef]
- Yang, J.P.; Chen, Y.C. Gradient enhanced localized radial basis collocation method for inverse analysis of Cauchy problems. Int. J. Appl. Mech. 2020, 12, 2050107. [Google Scholar] [CrossRef]
- Yang, J.P.; Guan, P.C.; Fan, C.M. Weighted reproducing kernel collocation method and error analysis for inverse Cauchy problems. Int. J. Appl. Mech. 2016, 8, 1650030. [Google Scholar] [CrossRef]
- Yang, J.P.; Hsin, W.C. Weighted reproducing kernel collocation method based on error analysis for solving inverse elasticity problems. Acta Mech. 2019, 230, 3477–3497. [Google Scholar] [CrossRef]
- Yang, J.P.; Lam, H.F.S. Detecting inverse boundaries by weighted high-order gradient collocation method. Mathematics 2020, 8, 1297. [Google Scholar] [CrossRef]
- Bataineh, A.S.; Isik, O.R.; Oqielat, M.A.; Hashim, I. An enhanced adaptive Bernstein collocation method for solving systems of ODEs. Mathematics 2021, 9, 425. [Google Scholar] [CrossRef]
- Brunner, H. The solution of systems of stiff nonlinear differential equations by recursive collocation using exponential functions. In Numerische Behandlung von Differentialgleichungen; Birkhäuser: Basel, Switzerland, 1975; pp. 29–44. [Google Scholar]
- Bülbül, B.; Sezer, M. A new approach to numerical solution of nonlinear Klein-Gordon equation. Math. Probl. Eng. 2013, 2013, 869749. [Google Scholar] [CrossRef]
- Biot, M.A. Theory of stability and consolidation of a porous medium under initial stress. J. Math. Mech. 1963, 12, 521–541. [Google Scholar]
- Haoyan, W.; Chen, J.S.; Hillman, M. A stabilized nodally integrated meshfree formulation for fully coupled hydro-mechanical analysis of fluid-saturated porous media. Comput. Fluids 2016, 141, 105–115. [Google Scholar]
- Chi, S.W.; Chen, J.S.; Hu, H.Y.; Yang, J.P. A gradient reproducing kernel collocation method for boundary value problems. Int. J. Numer. Meth. Eng. 2013, 93, 1381–1402. [Google Scholar] [CrossRef]



































Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.P.; Liao, Y.-S. Direct Collocation with Reproducing Kernel Approximation for Two-Phase Coupling System in a Porous Enclosure. Mathematics 2021, 9, 897. https://doi.org/10.3390/math9080897
Yang JP, Liao Y-S. Direct Collocation with Reproducing Kernel Approximation for Two-Phase Coupling System in a Porous Enclosure. Mathematics. 2021; 9(8):897. https://doi.org/10.3390/math9080897
Chicago/Turabian StyleYang, Judy P., and Yi-Shan Liao. 2021. "Direct Collocation with Reproducing Kernel Approximation for Two-Phase Coupling System in a Porous Enclosure" Mathematics 9, no. 8: 897. https://doi.org/10.3390/math9080897
APA StyleYang, J. P., & Liao, Y.-S. (2021). Direct Collocation with Reproducing Kernel Approximation for Two-Phase Coupling System in a Porous Enclosure. Mathematics, 9(8), 897. https://doi.org/10.3390/math9080897